
Abstract
Mobile robotics has become a well-known research area in healthcare applications; as it defines itself from general robotics, it can move in the surrounding environment which is essential for replicating human abilities. Mobile robots can be utilized in the hospital for health care applications like nursing for doctor assistance and patient monitoring, drug delivery, and teleoperation for contagious diseases. However, mobile robots need unique characteristics, such as the function of locomotion, perception, navigation, and vision systems. The solution and challenge of a mobile robot’s characteristics must be considered when developing a mobile robot. Therefore, they are becoming more autonomous, adaptable to changing situations, and extending their range of applications. This study aimed to investigate the system, which includes both physical robot features (sensors & actuators) and a comparison of different mobile robots in terms of their characteristics and applications in health care. In the coming years, mobile robotics will see increased development, incorporating cognitive architecture, artificial intelligence, speech communication, and affective human–robot interaction. Future healthcare intelligent mobile robots aim to enhance autonomy, communication, data security, and ethical considerations, enhancing patient care, efficiency, and collaboration between medical professionals and technology, shaping the future of healthcare delivery. This review paper presents an overview of the current mobile robot design architecture, which advances the design of the next generation of intelligent mobile robots used in healthcare.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In various applications, mobile robotics is the most rapidly growing field in scientific research. Because of their abilities, mobile robots can replace humans in a variety of fields. These application areas include surveillance, planetary exploration, patrolling, emergency rescue operations, reconnaissance, petrochemical applications, industrial automation, construction, entertainment, museum guides, personal services, intervention in extreme environments, transportation, medical care, and so on, as well as many other industrial and non-industrial applications (Rubio et al. 2019a; Kriegel et al. 2021). The integration of robots in healthcare provides a practical, complementary solution to address the demand raised by the shortage of healthcare professionals and promises safer, more efficient, and personalized care. For instance, robots might be presented as the solution to bridge the loneliness that elderly or disabled persons often experience (Zardiashvili and Fosch-Villaronga 2020). Automation of logistics in pickup and delivery in hospitals shows a great helping hand to the active workers (Cechinel et al. 2020). The application needs to allocate jobs to robots (Kumar et al. 2018). A mobile robot with autonomous navigation is capable of identifying the exact path and avoiding obstacles without the need for human assistance (Sunny et al. 2017; Hussain, et al. 2022). For autonomous navigation and smooth mobility, the robot needs to have an artificial brain. The artificial brain is also called artificial intelligence (AI), which is a technique that mimics the intelligence possessed by living things applied to inanimate objects to create similar abilities (Luo et al. 2023; Ahuja and Nair 2021). The main issue in controlling the robot is to ensure smooth navigation in its assigned environment. The most popular types of AI controllers are fuzzy logic and neural networks that can be applied to navigate a mobile robot (Yudha et al. 2019). An autonomous mobile robot has little or no human intervention for its movement and it is designed in such a way as to follow a predefined path in an indoor or outdoor environment also the path can be defined by the robot itself (Cechinel et al. 2020). For indoor navigation, the mobile robot is based on a floor plan, sonar sensing, an Inertial Measurement Unit (IMU), etc. The first autonomous navigation system was a planar sensor-like laser range finder to navigate without the need for human intervention (Cechinel et al. 2020; Ahuja and Nair 2021; Alatise and Hancke 2020). The ability of a robot to reach a goal or move around in the environment safely using installed sensors and a predefined map is one of the most important tasks in mobile robot design (Kahn et al. 2021; Bally, et al. 2022; Anikin et al. 2023).
The characteristics of mobile robot methods in healthcare are tailored to meet specific application requirements while aligning with patient safety and efficient healthcare operations. From patient interaction and medication delivery to surgical assistance and infection control, the design and features of these robots are carefully engineered to complement and enhance existing healthcare practices (Rubio et al. 2019b). By understanding the distinct characteristics of mobile robots in healthcare applications, we can harness their transformative potential to improve patient outcomes, streamline logistics, and elevate the overall quality of healthcare services. This short review seeks to explore the unique features of mobile robot techniques, with a particular emphasis on their use in the healthcare industry. This review aims to shed light on how these techniques are customized to meet the particular needs and problems of healthcare settings by offering concise and thorough explanations (Rubio et al. 2019b; Bohr and Memarzadeh 2020). The use of assistive robotic systems in health care is intended to relieve nursing staff (https://en.wikipedia.org/wiki/Robot-assisted_surgery).
The review aims to identify assistive robotic systems and their areas of application in nursing settings. It also provides an overview of existing social and nursing science findings from the research field of assistive robotic systems. The study found that assistive robotic systems could be divided into six fields of application: information and patient data processing, assistance with activities of daily living, fetch and bring activities, telepresence and communication, monitoring, safety and navigation, and complex assistance systems (https://en.wikipedia.org/wiki/Robot-assisted_surgery; Ohneberg et al. 2023). Another literature review that we found discusses the use of intelligent physical robots in health care. The review summarizes current knowledge in the field of intelligent physical robot use in health care, identifies the antecedents and the consequences of intelligent physical robot use, and proposes potential future research agendas in the specific area based on the research findings in the literature and the identified knowledge gaps (Huang et al. 2023).
In healthcare logistics, mobile robots showcase characteristics that streamline the delivery of medications, laboratory samples, and other supplies (Bloss 2011; Lonner et al. 2019). These robots are designed for efficient navigation through hospital corridors and elevators (Failed 2023). Their autonomy, navigation algorithms, and obstacle-avoidance capabilities ensure timely and accurate delivery without disruptions. Additionally, some robots are equipped with secure compartments and verification systems, enhancing the safety and integrity of medication transport (Christoforou et al. 2020; Awad et al. 2021; Harry 2023). Mobile robots dedicated to surgical assistance exhibit characteristics that underscore precision, stability, and collaboration with human surgeons (Attanasio et al. 2021). These robots often feature highly accurate robotic arms controlled by surgeons from a console. Force feedback mechanisms enable delicate procedures, and the integration of AI enhances decision-making during surgery. The characteristics of these robots are meticulously designed to reduce surgical errors, enhance visualization, and enable minimally invasive procedures (Attanasio et al. 2021; Fosch-Villaronga et al. 2023; Fu, et al. 2023).
In the context of infection control, mobile robots exhibit characteristics that prioritize hygiene, thoroughness, and automation. Equipped with UV-C lights or other disinfection mechanisms, these robots autonomously navigate hospital rooms, emitting light to eliminate harmful pathogens (McGinn, et al. 2021). Their design ensures comprehensive coverage while adhering to safety protocols, safeguarding both patients and healthcare workers (Astrid et al. 2021; Diab-El Schahawi, et al. 2021; Javaid et al. 2021). Mobile robots designed for data collection and analysis possess characteristics that emphasize data accuracy, real-time processing, and integration with medical databases. Equipped with sensors such as cameras and environmental sensors, these robots collect valuable data on patient vitals, environmental conditions, and more. Their onboard processing capabilities enable quick analysis, allowing medical professionals to make informed decisions based on up-to-date information (Zardiashvili and Fosch-Villaronga 2020; Bohr and Memarzadeh 2020; Javaid et al. 2021).
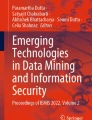
In the health care center, robotics and computer-aided decision support systems are popular. The robot automation system is closely linked to particular procedures and activities, and this must determine which procedures will benefit from the use of a robotic apparatus to increase service performance (Zhou et al. 2018; Păvăloiu et al. 2021). Mobile robots can be implemented in hospitals for different purposes, like nursing robots, service robots, internal anatomy diagnosis robots (endoscopic robots), and ambulance robots. Since robots can offer the opportunity to deliver the job in contagious or dangerous areas, they are not uncommon in hospitals, especially in infectious diseases sections. After the outbreak of COVID-19 in the latest period of 2019, China has deployed more than 14 mobile robots in their hospital to handle the task of cleaning and disinfection, checking up on patients’ fevers, transporting medicine and food, and entertainment, patients to play with them. Similarly, a robot named “Tommy” in one of the Italian hospitals was assisting the patients and doctors as a bridge by making remote communication without direct contact (Pandey and Gelin 2018). This robot can further measure a patient’s blood pressure and oxygen saturation without the need for doctors’ direct involvement. Figure 1 illustrates the development of a semi-automatic oropharyngeal swab robot for performing swab tests on patients (Meghdari et al. 2018).

A semi-automatic oropharyngeal swab robot (Meghdari et al. 2018)
In this paper, we briefly review the characteristic mobile robot method based on its application in health care. The principle and characteristics of each method are described, as well as the reference in a separate section. The existing design architecture of mobile robots has been discussed in Sect. 2. The characteristics and applications of mobile robotics in healthcare have been discussed in Sects. 3 and 4, respectively. Future mobile robot design architecture and some related discussions are covered in Sect. 5. Section 6 discusses future trends of mobile robots for healthcare applications for the coming few years. The overall conclusions regarding mobile robots are stated in Sect. 7.
2 The existing design architecture of a mobile robot
The design architecture of a mobile robot is a fundamental framework that outlines the structural and functional components of the robot, providing a blueprint for its construction, operation, and interaction with its environment. This architectural design serves as the foundational roadmap that guides engineers and designers throughout the robot's development process. The design architecture of a mobile robot integrates hardware, software, sensors, and control mechanisms into a cohesive framework. Its purpose is to ensure seamless integration and efficient operation, enabling the robot to carry out tasks effectively within its designated environment. A well-structured architecture not only fosters successful robot functionality but also sets the stage for further advancements in robotics technology. This section presents the existing mobile robot design architecture for applications in health care that was utilized to suggest the future mobile robot design architecture. Figure 2 shows the overall design architecture of a mobile robot for this review article.
-
i.
Hardware components: The physical components that make up the robot's mechanical structure are referred to as hardware. The chassis, wheels or tracks, actuators, sensors, and power sources are all included in this. The robot's body is formed by its chassis, and its wheels or tracks allow it to move. The robot receives information about its surroundings from sensors like cameras, LiDAR, ultrasonic sensors, and encoders, which allows it to see and react to its surroundings. The robot's mechanical components are acted upon by actuators, which can be either motors or servos, enabling the robot to perform actions and tasks. The energy needed for the robot to function is provided by the power sources, which are frequently batteries.
-
ii.
Sensor integration: One of the key components of the design architecture is the integration of different sensors. Sensors enhance the robot's perception abilities by providing information on distances, topography, obstacles, and other topics. For example, LiDAR uses laser beams to scan the environment, whereas cameras provide visual information. All of these sensors work together to give the robot a thorough awareness of its environment, which is necessary for it to make decisions and navigate on its own.
-
iii.
Control and processing units: The control and processing unit is at the heart of the design architecture. Microcontrollers, processors, memory, and software are all included in this unit. It acts as the robot's brain, analyzing sensor data, coming to conclusions, and giving actuator commands. Here, sophisticated algorithms are used to make tasks like obstacle avoidance, path planning, localization, and mapping possible. The processing unit is also in charge of overseeing communication between various parts and outside gadgets.
-
iv.
Communication interfaces: Modern mobile robots are often equipped with communication interfaces, allowing them to interact with humans, other robots, and external systems. These interfaces can include Wi-Fi, Bluetooth, Ethernet, or even more specialized protocols. This connectivity enables remote control, data sharing, and integration into larger robotic networks.
-
v.
Software architecture: The software architecture dictates how the robot's functionalities are organized and executed. It consists of several software modules that manage distinct functions, including communication, motion control, perception, and decision-making. This modular strategy makes updates and new features easier to integrate and improves maintainability.
-
vi.
Autonomy and navigation: A crucial design consideration is the robot's autonomy and navigation capabilities. Path planning algorithms, combined with data from sensors, enable the robot to autonomously navigate its environment while avoiding obstacles. Simultaneous Localization and Mapping (SLAM) techniques help the robot build a map of its surroundings and determine its position within that map.
-
vii.
User interface: For human–robot interaction, a user interface is integrated into the architecture. This can be a graphical interface displayed on a screen, a mobile app, or even voice commands. The interface allows users to monitor the robot's status, provide commands, and receive feedback.

Flowchart of the mobile robot’s design architecture
Table 1 assessed different kinds of mobile robots, their main components, operating principles, and their potential application area in the medical industry: for education, human interaction, transportation, diagnosis, communication, and monitoring patients in a hospital.
3 Characteristics of mobile robot
In mobile robots, the performance of characteristics is strongly based on the locomotion, perception, navigation, vision system, Sensors, and their function in a mobile robot. This method is crucial for improving the advancement of the mobile robot design architecture.
3.1 Locomotion
The design of a mobile robot is dependent on the service to be rendered; therefore, a mobile robot can be designed to walk, run, jump, fly, etc. The requirement of the designed robot, they are categorized into stationery and mobility: on land, water, or air. Examples of such designed mobile robots are wheeled, legged, walking, or hybrid. Legged, wheeled, and articulated bodies are the main ways mobile robots are locomotor (Alatise and Hancke 2020). Mobile robots have to be flexible enough for easy maneuvering. The locomotion system of a mobile robot is an essential feature of its architecture, and it is influenced by technical parameters such as maneuverability, controllability, terrain conditions, performance, stability, and so on, as well as the medium in which the robot moves (on the Earth's surface, underwater, in the air, and so on) (Rubio et al. 2019a). End-users can benefit from more versatility in new technologies as a result of this. For such a purpose, the robot which has a mechanism having robotic arms with tracks is useful. Particularly, the leg mechanism that is used as a robotic arm is effective if it can be used in both locomotion and manipulation. Some robots having mechanisms with legs and tracks or wheels have been presented. These types of robots, however, are not suitable for handling tasks very much due to their leg mechanism or single manipulation arm (Fujita and Sasaki 2017).
3.2 Perception and localization
3.2.1 Perception
Perception involves the areas of signal analysis and specialized fields such as computer vision and sensor technologies (Rubio et al. 2019a). An autonomous mobile robot needs to acquire information from its working environment, its relative position, or up to the area, the robot can be affected, by sensing objects around. If a mobile robot is unable to observe its environment correctly and efficiently, performing tasks such as estimating the position of an object accurately may be an issue. To achieve this, information is perceived by the use of sensors and other related devices (Alatise and Hancke 2020).
Most of the robots use either exteroceptive or proprioceptive sensors. Exteroceptive sensors sense properties that are external to the environment like distance, proximity, light intensity ambient temperature, vision, sound, and then like. These sensors include infrared proximity sensors, sonar proximity sensors, radar proximity sensors laser range finders, microphones, cameras, GPS, and so on. On the other hand, proprioceptive sensors measure internal robot properties like force, torque, robot wheel rotation, robot total moving distance, energy level, acceleration, and speed of a robot.
The robots use different ranges of sensors to get accurate information about their states and environment. The robot perception tries to give enough information for robots’ motion and navigation decisions. For this reason, robots use redundant and different sensors that sense the same properties of the robots. The robot deterministic or probabilistic model with be fused with sensor measurements to filter out the optimal robot state prediction. For this process, the Kalman filter, extended Kalman filter, and particle filter methods have been employed in different robot perception systems.
In addition, the perception system needs to understand how to interact with other agents around it. This idea is the major research area for multi-agent systems and human–robot interaction. One common experience of human perception, hearing someone’s voice for the first time can also make us form a mental image of how that person might look like. For example, it is a common experience to observe “a speaker whose voice is familiar and being surprised by that person’s appearance” (Mišeikis et al. 2020). These capabilities will be surveyed within the research survey through deep learning perception model algorithms that can determine how a robot responds to the dynamic changes within an environment. The basis of these models revolves around control theory-affiliated paradigms for instance system stability, control as well as observation (Shabbir and Anwer 1803). A study in Cyprus during the midst of the pandemic to investigate tourists’ perceptions regarding the use of robots and, more specifically, anthropomorphic robots in the tourism domain was explored. A total number of 78 interviews with tourists were retained for this study. The findings revealed that tourists favor the use of anthropomorphic robots over any other type of robot (Christou et al. 2020).
3.2.1.1 Vision System
Vision is the main perception means to understand the external environment for any robotic system. Computer vision/machine vision of the mobile robot could be implemented for obstacle detection, mobile robot-to-human and other robot interactions, navigation, and localization. In the case of obstacle detection, the movement of a mobile robot in a hospital may cause a collision between a person and an object so the collision must be prevented. To prevent a collision, it is necessary to recognize whether or not an object exists in the movement path of the robot (Park, et al. 2022). In computer vision, object recognition and feature matching are significant tasks to be performed for accurate positioning. Object recognition refers to the process of identifying and classifying objects within digital images or video frames. The goal is to enable computers to interpret visual information in a way that is like how humans perceive and recognize objects. Feature matching or image matching on the other hand performs the task of establishing correspondence between two images detected in the same scene/object (Alatise and Hancke 2020; Joseph et al. 2018; Kang et al. 2017). Multiple cameras, such as binocular stereo vision, a single camera with a calibration target, and a single camera with external hardware, such as structured light and laser, are common 3D measurement methods. There have been a variety of robot vision systems, each with its own set of applications (Hussain, et al. 2022; Guo et al. 2017; Mohamad and Zhu 2016). Visual-based control methods aim to control a dynamic system by utilizing visual features acquired from images ensured by one or multiple cameras. In other words, controlling a robot can be modeled through a visual perception infrastructure. This is done by applying image processing techniques on each of the frames acquired from the imagining device. All visual-based controls aim to decrease errors and the motion cost to an admissible level.
3.2.2 Localization
Localization addresses the problem of finding the exact location of the robot with some inertial and non-inertial references. There are three commonly used localization methods used in a mobile robot.
The first one is Position tracking (dead-reckoning) which uses the information of changes of angular and linear positions from past known initial positions to predict current positions. Odometry is the most common kind of dead-reckoning method that predicts a robot’s location using angular and linear position changes measured by a wheel encoder. However, it is highly prone to error due to wheel slip and accumulated numerical integration.
The second kind of localization method is global localization. It uses maps of landmarks to locate robots using sensor measurements relative to the landmarks and different map-matching methods, beacons, and active infrastructure like GPS, Wi-Fi, and Bluetooth communication with known locations. Beacons use different methods like trilateration, fingerprinting, and proximity to localized robots. Global localization suffers at dynamic landmarks, and inaccessibility of sensors like GPS when robots are working on indoor services.
The third method is a combination of the two methods dead-reckoning and global localization. Sensor fusion could be employed when the two methods get better results from the two methods.
3.3 Navigation
The navigation system of a mobile robot refers to the set of algorithms, sensors, and technologies that enable the robot to move autonomously and navigate through its environment. This system allows the robot to plan its path, avoid obstacles, and reach its destination without constant human intervention, for example, responses to avoid obstacles to obstruction objects, and the sensor input provides information that the obstacle is near, then the output of wheel motion will move the robot away from the obstacle and approach a target point which has been specified (Yudha et al. 2019; Guo et al. 2017; Kastner, et al. 2023). In the navigation process of a mobile robot, the robot could perceive sensor inputs and use stored known maps from the mobile computer database, localize itself relative to a known reference, and perform cognition motion planning and motion control (Hong et al. 2013). The navigation system also analyzes how the robot's own experience will include retrospective self-supervision: for certain physically salient navigational goals, such as avoiding collisions or preferring smooth over bumpy terrains, the robot can autonomously assess how well it has fulfilled its objective (Kahn et al. 2021).
Global navigation, local navigation, and personal navigation are the three forms of mobile robot navigation. Global navigation is the ability to identify the location of elements in the world relative to the reference axis and to move toward a predetermined target (Anjum et al. 2021). Local navigation is concerned with determining the environment's dynamic conditions and establishing positional relationships among various elements. Personal navigation is the practice of handling the different elements of the system relative to one another while taking into account their relative roles (Mišeikis et al. 2020; Patle et al. 2019).The navigation methods use the existing knowledge of the environments and new information about dynamic environments using a sensor. These are different kinds of navigation methods.
3.3.1 Bug algorithm
This algorithm is the best for situations where the robot does not have any knowledge about the environment. The bug algorithms allow robots to circumnavigate the obstacles within a safe distance to avoid collision and help the robot understand the obstacle boundary map. This method is not optimal and full of tries and errors (Mettler et al. 2017; Cooper et al. 2020).
3.3.2 Generalized Voronoi diagram
The generalized Voronoi graphs are the set of connected points located at equal distances between obstacles. The location of the boundaries of the obstacles will be detected with the sensors of the robot and prior knowledge of the environment. This graph will be used as a road map in robot navigation (Gómez et al. 2013; Zeng et al. 2020). The path definition for a robot is to select the optimal path from the Voronoi graph lines between the starting and the goal points of the robot navigation (Masehian and Amin-Naseri 2004). Different optimization methods, such as Dijkstra, A*, and heuristic search algorithms can be employed for optimal path selection from the Voronoi graph. The core idea of this method is the locus of the equidistant points between obstacles located at the free space are the best locations for safe robot navigation (Shao and Lee 2010; Xuan et al. 2011).
3.3.3 Visibility graph
This is the other kind of robot roadmap developing navigation method. The visibility graph method uses line projection algorithms like rotational plane sweep algorithms from the standing location of a robot to obstacles using a sonar or lidar sensor or imaginary lines if the map of the working environment is known to search for a possible path to the goal point (Masehian and Amin-Naseri 2004; M. el KHAILI 2014). Connection of different projected lines from the start point will be developed and further connected to the goal point (Oommen et al. 1987; Rao et al. 1988). The optimal path will be selected from the available possible paths using Dijkstra, A*, and other optimization methods.
3.3.4 Artificial potential field method
Artificial potential field method navigation is a continual search for the target point till the goal point. The method is composed of attraction and repulsive forces functions (Gómez et al. 2013). The attractive force function tries to attract the robot to the target goal point to find the shortest path and repulsive forces keep the robot away from the obstacles (Masehian and Amin-Naseri 2004). The optimal path is the path that minimizes the artificial potential field function. It is sometimes difficult to find global minimal points and the method suffers from the local minimal point.
3.3.5 Cell decomposition method
The cell decomposition method divides the robot working environment into non-overlapping cells and the robots try to navigate through the free cells that are not occupied with the obstacles. This method is not adaptable to a dynamic environment. The large number of cells in the environment increases accuracy and optimality but it has a high computational cost (Esan et al. 2020).
3.3.6 Sampling-based navigation methods
The computational effort and the time needed for the computation of the other methods drive the need for sampled-based navigation. Sample points from the robot working environment will be taken and checked whether they are part of the obstacle or not. There are two common sampled passed robot navigation methods, probabilistic roadmaps (PRMs) and rapid exploring random trees (RRTs), and rapid exploring random trees star (RRT*s) (Kala 2013).
PRMs generate random points in the robot environment and eliminate all points in the samples that are parts of the obstacles. Then, PRMs use search optimization methods like A* to find new optimal paths between the sampled points to reach the goal point.
RRTS uses a tree-like graphical structure to connect randomly generated points. Every point will be compared with its neighboring points to check for optimal connection between points and non-optimal connection will be eliminated. This will be repeated till the robot reaches the goal points.
3.3.7 Genetic algorithms (GA)
GA is an evolutionary optimization method that passes in a repetitive iteration to provide optimal navigation in the environment by finding the fittest point path connections from the starting to the target point (Gemeinder and Gerke 2003). However, this method is limited to the static environment, and it needs a coalition with fuzzy logic and neural networks to find the optimal navigation points in the dynamic environment.
3.3.8 Fuzzy logic-based navigation
The fuzzy logic-based navigation of a robot can be used in the environment for uncertain and dynamic environments (Luo et al. 2023; Montaner and Ramirez-Serrano 1998; Pequeño-Zurro, et al. 2023). It can be combined with different optimization methods like GA and simulated annealing methods to achieve optimal navigation (Kästner et al. 2021).
3.3.9 Artificial neural network-based navigation
It is a human brain-inspired method that can be used as a universal approximator for any function. Due to the increase in the computational power of recent computers, this method is employed in robot navigation by using online and offline training (Engedy and Horváth 2010). It can be used in static and dynamic environments.
3.3.10 Neuro-fuzzy-based navigation
The neuro-fuzzy methods that used neural network-trained fuzzy rules and inference methods have been developed and used in robot navigation methods (Zhu and Yang 2007). The commonality of this kind of method is the adaptive neuro-fuzzy inference system (ANFIS).
3.3.11 Simulated annealing-based navigation
Simulated annealing is a metal annealing-inspired method that comes from the statistical mechanic’s concept (Miao and Tian 2013). It has been used to optimize fuzzy logic-based robot navigation and artificial potential field methods.
3.3.12 Particle swarm optimization (PSO) based navigation
PSO is a social behavior-inspired stochastics optimization used to optimize the robot navigations. It has been employed in multi-robot navigation optimization, optimizing fuzzy logic-based navigations, and simultaneous localization and navigation methods (SLAM) (Dewang et al. 2018).
3.3.13 Ant colony optimization (ACO) for robot navigation
ACO bionics inspired probabilistic optimization method used to optimize fuzzy logic-based navigation, to search for paths and obstacle avoidance systems in dynamic environments, and cell decomposition methods (Garcia et al. 2009).
3.3.14 Reinforcement learning for robot navigation
Reinforcement learning is inspired by the learning psychology of animals that consists of an agent and an environment to make an optimal decision based on their interaction experience. This prominent machine learning method will model the system that is considered to be dealt with as a Markov decision process that consists of the state of the environment, the action taken by the agent, the reward value obtained, and the state transition probability. The agent learns the best decision based on the interaction with the environment. The reinforcement learning method is a promising area to address navigation problems compared to other intelligent and conventional methods.
The configuration space is usually prone to a dynamic environment in which the obstacles are continuously changing their position with a variable velocity. This problem leads to a highly robust and adaptive navigation method that changes the navigation strategies based on the environment dynamics. In addition, the sensors are not accurately sensing the environment and give precise information to the robot. They are highly exposed to malfunctioning and noise that needs continuous filtering and fault correction.
The reinforcement learning method is a promising area to address navigation problems compared to other intelligent and conventional methods (Zhu and Zhang 2021).
3.4 Design improvements for future healthcare intelligent mobile robots
As the field of robotics continues to advance, there is a growing emphasis on designing intelligent mobile robots that can play a transformative role in healthcare. These robots have the potential to enhance patient care, assist medical professionals, and streamline healthcare operations. To pave the way for their optimal integration, a range of design improvements are crucial. This explanation delves into the key design enhancements that can shape the future of healthcare intelligent mobile robots (Soriano, et al. 2022; Amjad et al. 2023).
-
i.
Enhanced autonomy and navigation: Intelligent mobile robots for healthcare in the future should have better autonomy and navigational skills. More sophisticated sensor technologies, like depth cameras and 3D LiDAR, can give these robots a more precise sense of their surroundings. These sensors, when combined with advanced AI algorithms, allow robots to safely interact with patients and medical equipment while navigating intricate hospital layouts and avoiding obstacles. Furthermore, improvements in simultaneous localization and mapping (SLAM) methods can improve the robots' capacity to map their environment precisely, which will facilitate navigation.
-
ii.
Human–robot interaction and communication: It is critical to design robots with user-friendly human–robot interaction (HRI) interfaces. Robots with natural language processing (NLP) skills may be able to comprehend and react to spoken instructions from patients and medical personnel alike. Adding expressive gestures and visual displays can help people communicate more effectively, which improves the flow and significance of interactions. These advancements guarantee that in healthcare environments, people view robots as reliable and cooperative partners.
-
iii.
Versatile task adaptability: Future intelligent mobile robots in healthcare should have modular designs that facilitate easy task adaptation and customization. Robots are capable of carrying out a wide range of tasks, from administering medication to performing minor surgical procedures, thanks to interchangeable end-effectors like grippers or medical instruments. Robots are useful tools that can handle a variety of healthcare requirements because of their adaptability.
-
iv.
Data security and privacy: Strong data security and privacy protocols are essential as robots handle more and more private patient information. Patient information will not be accessed by third parties without authorization if encryption protocols and secure data transmission methods are put in place. Furthermore, to guarantee that only authorized personnel can interact with them; robots should be outfitted with physical security features like biometric authentication.
-
v.
Integration with electronic health records (EHR) systems: An important design improvement is seamless integration with electronic health record (EHR) systems. Workflows are streamlined and the chance of error is decreased when robots have direct access to and update patient data within EHR systems. By ensuring that healthcare providers have instant access to patient data, this integration helps them make better-informed decisions.
-
vi.
Remote operation and telemedicine: Intelligent mobile robots for healthcare can be more useful when they have remote operation capabilities. In telemedicine consultations, medical professionals can operate robots remotely to evaluate patients, give advice, and work with staff members present. In addition to serving as conduits for medical equipment, these robots can also perform remote diagnostic procedures, which eliminates the need for in-person visits.
-
vii.
Ethical and cultural considerations: Ethical and cultural considerations should be taken into account when making design improvements. Healthcare robots have to follow moral standards that protect patient privacy, autonomy, and cultural sensitivity. It is recommended that transparent decision-making algorithms be employed so that patients and medical personnel can comprehend the reasoning behind the robots' actions. The next generation of intelligent mobile healthcare robots will focus on creating flexible, safe, and intuitive systems that enhance autonomy, communication, adaptability, data security, and ethical considerations, potentially enhancing patient care, operational efficiency, and medical professional cooperation.
3.5 Technical evolution and challenges in mobile robots designed for healthcare applications
Mobile robots designed for healthcare applications have witnessed remarkable technical evolution over recent years. These advancements have the potential to revolutionize patient care, medical procedures, and healthcare logistics. However, along with these positive developments, several challenges are also perceived. This explanation delves into the intricacies of the technical evolution and the associated challenges that mobile robots designed for healthcare applications encounter (Failed 2023; Junaid, et al. 2022). The technical evolution of mobile robots in healthcare has led to significant advancements in sensing technologies, autonomy and navigation, human–robot interaction, surgical assistance, and data integration. As shown in Table 2, sensors have enabled robots to accurately perceive their environment, improve situational awareness, and navigate complex environments. Autonomy and navigation algorithms have improved, and human–robot interaction has been enhanced with natural language processing and gesture recognition. Surgical robots now offer finer dexterity, haptic feedback, enhanced visualization, and data integration and analysis (Rubio et al. 2019a; Kyrarini, et al. 2021).
The advancement of mobile robots in healthcare faces several challenges, including safety, ethical concerns, adaptability, cost, integration, regulation, and technical limitations. Ensuring safety and reliability in sensitive environments, balancing automation with human involvement, and designing robots for a wide range of tasks are crucial. High costs, compliance with regulatory standards, and technical limitations in dynamic environments also pose challenges. Despite these challenges, the potential for improved healthcare outcomes remains a significant challenge (Failed 2023). Ensuring the safety and reliability of mobile robots within sensitive healthcare environments remains a challenge. Robots must reliably navigate and interact without endangering patients, medical staff, or themselves (Raje, et al. 2021; Siala and Wang 2022). The use of robots in healthcare raises Ethical Considerations, including patient privacy, informed consent, and the delegation of medical decisions to machines. Striking a balance between automation and human involvement is crucial (Farhud and Zokaei Nov 2021; Yew 2021; Tan et al. 2021). Despite advancements, robots may still encounter technical limitations in highly dynamic or cluttered environments. Addressing challenges related to reliable operation under diverse conditions is a continuous endeavor (Ingrand and Ghallab 2017; Gielis et al. 2022). The advancement of healthcare mobile robots holds great promise for improving patient care, but challenges like safety, ethics, adaptability, cost, regulation, and technical limitations need to be addressed.
4 Applications of mobile robotics in healthcare
In the contemporary landscape of healthcare, the integration of mobile robots has gained significant attention due to their potential to revolutionize various aspects of patient care, logistics, and medical procedures. This brief review aims to investigate the distinctive characteristics of mobile robot methods, focusing specifically on their application within the healthcare domain. By providing clear and detailed explanations, this review seeks to shed light on how these methods are tailored to address the unique challenges and requirements of healthcare settings. Mobile Robotics in Healthcare perform various applications, mainly; we can use for carrier robots, serving robots in hospitals, socially assistive robots (SAR), teleportation mobile robots, patient assistance and care, Medication Delivery and Logistics, Surgical Assistance, Disinfection and Sanitization, and Data Collection and Analysis.
4.1 Carrier robots
Back pain is a common problem among caregivers since one has to transfer patients from beds to wheelchairs, typically for an average of 40 times a day. The Robot for Interactive Body Assistance (RIBA) is the first assistive robot to carry patients weighing up to 60 kg from bed to wheelchair and back. Commands are given to RIBA by the caregiver through tactile guidance, instead of the traditional joystick controller (Fosch-Villaronga et al. 2023).
4.2 Serving robots in hospital
There are many tasks in hospitals that, handling of the material is required. These tasks can be easily accomplished with the aid of serving robots. Robots are also used to carry food to several hospital patients. They're used for things like delivering food and drinks, dispensing medications, picking up dirty laundry, delivering fresh bed sheets, and transporting daily and contaminated waste, among other things (Fu, et al. 2023).
4.3 Socially assistive robots (SAR)
A special group of Healthcare robots is the Socially Assistive Robots. SAR focuses on communication to enhance users’ health and psychological well-being through diagnosis, therapy or offering companionship to those who feel lonely (Khan et al. 2019; Koh, et al. 2022; Kumar et al. 2021). One of the major advantages of therapy robots is that users can have access to them whenever they need them, rather than depending on therapist availability. Patients in waiting rooms or entrances of hospitals and care centers need Boredom while waiting, patient logistics, and monitoring the progression of the illness. The robot can serve as a companion and provide entertainment, including cognitive games, access to user’s health records to provide assessment, enable smart appointment scheduling, give information to patients, and serve as a receptionist to welcome, check-in, and alert the medical personnel of appointments, and guide new incomers to the hospitals, triage tasks, and hospital staff can monitor and make requests of robot actions through the internet (McGinn, et al. 2021).
4.4 Teleoperation mobile robot
Teleoperation applications nowadays use the mobile robot platform with attached robot arms and are controlled remotely (Shin et al. 2022). For safety–critical applications such as health screening and swab testing in the medical field, human operators need to control the robot arm accurately (Shahri and Sayyedalhosseini 2021). A standard remote-control method like a joystick requires highly skilled personnel to operate the robot. Typically, this type of robot system consists of a mobile robot system, controlled remotely by the human for executing specific dangerous and safety–critical tasks. It has many possible uses, for example, in the medical field, such as for health screening and swab tests, especially during pandemics like influenza and COVID-19 outbreaks (Prathiba et al. 2022).
4.5 Patient assistance and care
Mobile robots designed for patient assistance and care have empathy, communication, and safety features. These robots are equipped with advanced sensors and AI algorithms to navigate crowded hospital environments while avoiding collisions with patients and medical equipment. Their communication abilities, which frequently include speech and visual interfaces, allow them to interact with patients, provide information, and provide companionship. These characteristics are critical for improving overall patient experiences and enhancing patient well-being (Deo and Anjankar May 2023; Holland, et al. 2021).
4.6 Medication delivery and logistics
Mobile robots include features that simplify the transportation of drugs, lab samples, and other supplies in the field of healthcare logistics. These robots are made to navigate hospital elevators and corridors with efficiency. Their autonomy, obstacle avoidance skills, and navigation algorithms guarantee uninterrupted, timely, and correct delivery. Furthermore, several robots are outfitted with safe spaces and authentication mechanisms, augmenting the security and consistency of pharmaceutical conveyance (Pinna et al. 2015; Pádua Ribeiro et al. 2013).
4.7 Surgical assistance
The attributes of mobile surgical aid robots emphasize accuracy, steadiness, and cooperation with human doctors. These robots frequently have extremely precise robotic arms that doctors operate from a console. Delicate procedures are made possible by force feedback devices, and the incorporation of AI improves surgical decision-making. These robots' features are carefully crafted to lower surgical mistake rates, improve visibility, and facilitate less invasive treatments (Smith et al. 2011; Schulz et al. 2007).
4.8 Disinfection and sanitization
Mobile robots have features that emphasize automation, sanitation, and thoroughness in the context of infection control. These autonomous robots roam hospital rooms while generating light to eradicate hazardous microorganisms. They are equipped with UV-C lamps or other disinfection systems. Both patients and healthcare personnel are protected by their design, which guarantees complete coverage while upholding safety regulations (Fuchsman et al. 2022; Hassan et al. 2021).
4.9 Data collection and analysis
Data accuracy, real-time processing, and interface with medical databases are prioritized features of mobile robots intended for data collecting and analysis. These robots gather important information on patient vitals, ambient conditions, and other subjects since they are outfitted with sensors like cameras and environmental sensors. Medical experts may make well-informed decisions based on current information thanks to their onboard processing capabilities, which facilitate speedy analysis (Guntur et al. 2019; Dwivedi et al. 2022; Anikwe et al. 2022). In conclusion, mobile robot approaches in healthcare are adapted to particular application needs while maintaining patient safety and effective healthcare operations. The features and design of these robots are carefully engineered to complement and improve current healthcare practices, from medication delivery and patient interaction to surgical assistance and infection control. We can use mobile robots' revolutionary potential to enhance patient outcomes, expedite logistics, and raise the standard of healthcare services by comprehending their unique features in healthcare applications. Figure 3 shows the overall application of mobile robots.

Applications of mobile robots
5 Discussions
This study aims to provide a characteristic of mobile robotics for healthcare applications. It is found that the need for mobile robots in health care tasks is evident, but their deployment needs to be based on a thorough analysis of the whole logistics system, and their designs should be made accordingly. Although current robotic systems show promise for future applications, completely or partially reconstructing intelligent mobile robot frameworks, will yield substantial improvements. Mobile robots have different characteristics among those four of which are discussed as locomotion, perception, navigation, and vision systems with different techniques of implementation. Also, there are different sensors used in mobile robots, some of those are tactile, wheel encoder, optical sensor, heading sensor, vision-based sensor, active ranging sensors, etc. and under such categories, different sensors are involved. Mobile robots can be utilized in hospitals as nurse robots, service robots, socially assistive robots, and teleported robots. From the different literature, the following recommendations are given for future mobile robot design architectures.
5.1 The physical structure
The physical structure of the robot is defined based on the robot’s configuration space which depends on the functional need. The components of the robot structure shall be made from lighter, stronger, and more durable material to lower the load on an actuator that will move the robot components. Also, one of the structural components of a robot is the wheel or the leg. The selection of these components depends on the kind of robot it is planned to design, the terrain structure of the environment, and the complexity of the control signal needed. Legged structure robots need complex control and actuation methods while wheeled robots are highly exposed to slip on slippery roads and the dead reckoning is exposed to error, so the selection of the proper structure should be done considering all of these points.
5.2 Robot localization
The localization method should employ both global and local localization methods to eliminate localization errors. Global localization signals my loss where the signal from the reference coordinate (example: GPS) is lost and at the same time, local localization methods are exposed to errors, like dead reckoning errors due to numerical approximation and wheel slip. The localization method that employs both global and local methods will handle such kinds of errors. The recent advancement in simultaneous localization and mapping (SLAM) is another way of integrating navigation with localization using onboard sensors.
5.3 Robot navigation
The robot navigation problem in the health application robots is usually finding an optimal path in the highly dynamic environment and the prior knowledge of the environment map is not enough to handle the navigation problem. As a general guideline:
-
Employ classical navigation methods for a static environment
-
Employ advanced and learning-based navigation methods for a dynamic environment where the robots will adapt to the environmental changes and be able to make the right decision for the optimal path.
5.4 Perception
The perception method highly relies on the quality of the sensors used and the extraction of the sensor data. The perception design is the tradeoff between cost and quality. It is highly recommended that multiple sensor fusion be used for perception, especially for the highly sensitive application areas of robots. Different kinds of sensor fusion methods could be employed to make the synergy of all available sensors such as Kalman filter, Extended Kalman filter, and particle filter.
5.5 Software and processors
It is commonly known to use real-time operating systems for robotics and embedded systems. The real-time operating system usually works on polling or event interruption. The former uses checking every input (sensors) and output (actuators) sequentially while the latter uses events triggers to send a signal to the processor and based on the priority of the events, action signals will be sent. It is recommended to use event-interrupted operating systems. Furthermore, the distributed computation process would be preferred over centralized computation. It is now preferable to use different processors for different computations to reduce computational complexity and save time, thanks to the recent advancements in high-speed processor technology. Unless computationally complex robot design is needed, it is better to use distributed computational architecture.
6 Future trends of mobile robots for health care applications
The healthcare industry is constantly evolving, and it is essential to keep up with the latest trends to stay ahead of the curve. According to a recent report by Wolters Kluwer, future trends include building trust in an age of digital information overload, integrating the Internet of Things (IoT) for remote patient monitoring, using blockchains for secure data sharing, implementing telemedicine for remote services, and utilizing patient-generated health data (PGHD) for improved engagement, personalized care, and patient outcomes (https://www.wolterskluwer.com/en/expert-insights/artificial-intelligence-and-the-pursuit-of-compliance-program-optimization). The integration of these cutting-edge technologies with mobile robots would have a tremendous impact on the health sector. With the increasing use of digital technology in healthcare, it is essential to build trust with patients by ensuring the security and privacy of their data (Paul et al. 2023). IoT refers to a system in which there is an interaction between the internet and a machine or a computer device (Zeadally et al. 2020). The integration of IoT in healthcare applications can help in remote patient monitoring, real-time tracking of vital signs, and more (Kelly et al. 2020; Rejeb, et al. 2023; Ratta et al. 2021). The use of blockchain in healthcare applications can help secure data sharing, reduce fraud, and improve the accuracy of medical records (Zeadally et al. 2020; Ratta et al. 2021). Furthermore, telemedicine is the use of technology to provide remote healthcare services. The use of telemedicine in healthcare applications can help reduce healthcare costs, improve access to care, and provide better patient outcomes. Patient-Generated Health Data (PGHD) refers to health data that is generated by patients themselves. The use of PGHD in healthcare applications can help in improving patient engagement, providing personalized care, and improving patient outcomes (Paul et al. 2023; Stoumpos et al. 2023). This will give better autonomy for the mobile robots to assist the patients based on the patient's health history data.
7 Conclusion
This review article aims to offer a compact text that makes it easier to see mobile robot characteristics from a global perspective in healthcare application domains. The mobile robot's design architecture combines hardware, software, sensors, and control mechanisms for efficient operation and seamless integration within its designated environment. The main characteristics of mobile robots involved in this field are locomotion, perception, localization, vision systems, and navigation. The state of the art, trends, and novel applications are scattered throughout the review article. For readers who wish to go deeper into this area, the most recent references are provided. The field of mobile robotics will develop more in the upcoming years. The robots are designed to enhance healthcare practices, from medication delivery to patient interaction, surgical assistance, and infection control. The integration of cognitive architecture, artificial intelligence, speech communication, and affective human–robot interaction is set to increase in robots. Mobile robots in healthcare are designed to enhance patient outcomes, expedite logistics, and improve services, enhancing medication delivery, patient interaction, surgical assistance, and infection control, while maintaining patient safety and effective operations. The technical evolution of mobile robots designed for healthcare applications brings immense promise for improving patient care and medical procedures. While significant strides have been made, challenges related to safety, ethics, adaptability, cost, regulation, and technical limitations require careful consideration. By addressing these challenges, the healthcare industry can unlock the full potential of intelligent mobile robots, enabling them to contribute effectively to patient well-being and healthcare efficiency. In the rapidly evolving landscape of healthcare, mobile robots have a major role. Trust-building remains paramount in an era of digital information overload. Integrating mobile robots into health applications involves leveraging technologies like blockchains for secure data sharing, incorporating the Internet of Things (IoT) for remote patient monitoring, deploying telemedicine for delivering remote services, and utilizing patient-generated health data (PGHD) to enhance engagement, provide individualized care, and improve patient outcomes. These forward-thinking strategies in the healthcare domain, akin to advancements in mobile robot applications, aim to enhance patient results, reduce healthcare expenses, and foster greater patient involvement.
Data availability
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Ahuja, V., Nair, L.R.: Artificial intelligence and technology in COVID era: a narrative review. J. Anaesthesiol. Clin. Pharmacol. (2021). https://doi.org/10.4103/JOACP.JOACP_558_20
Alatise, M.B., Hancke, G.P.: A review on challenges of autonomous mobile robot and sensor fusion methods. IEEE Access 8, 39830–39846 (2020)
Amjad, A., Kordel, P., Fernandes, G.: A review on innovation in healthcare sector (telehealth) through artificial intelligence. Sustainability 15(8), 6655 (2023)
Anikin, N., Dik, A., Yambrovskaya, D., Mikhaylova, K., Markvashev, T., Petrenko, E.: The role of interactive technologies in optimizing the process of patient treatment: prospects and challenges for health care. J. Complement. Med. Res. (2023). https://doi.org/10.5455/JCMR.2023.14.03.19
Anikwe, C.V., et al.: Mobile and wearable sensors for data-driven health monitoring system: state-of-the-art and future prospect. Expert Syst. Appl. 202, 117362 (2022)
Anjum, T., Lawrence, S., Shabani, A.: Augmented reality and affective computing on the edge makes social robots better companions for older adults. ROBOVIS (2021). https://doi.org/10.5220/0010717500003061
Astrid, F., Beata, Z., Van den Nest, M., Julia, E., Elisabeth, P., Magda, D.-E.: The use of a UV-C disinfection robot in the routine cleaning process: a field study in an Academic hospital. Antimicrob. Resist. Infect. Control 10(1), 84 (2021). https://doi.org/10.1186/s13756-021-00945-4
Attanasio, A., Scaglioni, B., Momi, E.D., Fiorini, P., Valdastri, P.: Autonomy in surgical robotics. Annu. Rev. Control Robot. Auton. Syst. 4(1), 651–679 (2021). https://doi.org/10.1146/annurev-control-062420-090543
Awad, A., et al.: Connected healthcare: improving patient care using digital health technologies. Adv. Drug Deliv. Rev. 178, 113958 (2021)
Bally, E., et al.: Patients’ perspectives regarding digital health technology to support self-management and to improve integrated stroke care: qualitative interview study (preprint). J. Med. Internet Res. (2022). https://doi.org/10.2196/42556
Bensaci, C., Zennir, Y., Pomorski, D.: Nonlinear Control of a differential wheeled mobile robot in real time-Turtlebot 2. In: Presented at the International Conference on Advanced Technologies and Electrical Engineering (ICTAEE’18), Skikda, Algeria, 2018 (2018). [Online]. Available: https://hal.science/hal-02014895
Bloss, R.: Mobile hospital robots cure numerous logistic needs. Ind. Robot Int. J. 38, 567–571 (2011). https://doi.org/10.1108/01439911111179075
Bohr, A., Memarzadeh, K.: The rise of artificial intelligence in healthcare applications. Artifi. Intell. Healthc. (2020). https://doi.org/10.1016/B978-0-12-818438-7.00002-2
Broadbent: Human–Robot Interaction Research to Improve Quality—An Approach and Issues, 2011-01-01T00:00:00Z (2011)
Cechinel, A.K., Perez, A.L.F., Plentz, P.D.M., De Pieri, E.R.: Autonomous mobile robot using distance and priority as logistics task cost, 2020-10-18T00:00:00Z (2020). https://doi.org/10.1109/IECON43393.2020.9255008
Chivarov, N., et al.: Case study on human–robot interaction of the remote-controlled service robot for elderly and disabled care. Comput. Inform. (2019). https://doi.org/10.31577/CAI_2019_5_1210
Christoforou, E.G., Avgousti, S., Ramdani, N., Novales, C., Panayides, A.S.: The upcoming role for nursing and assistive robotics: opportunities and challenges ahead. Front. Digit. Health 2, 585656 (2020)
Christou, P., Simillidou, A., Stylianou, M.C.: Tourists’ perceptions regarding the use of anthropomorphic robots in tourism and hospitality. Int. J. Contemp. Hosp. Manag. 32(11), 3665–3683 (2020)
Ciuti, G., et al.: Frontiers of robotic endoscopic capsules: a review. J. Micro-Bio Robot. 11, 1–18 (2016)
Cobb, E., Sullivan, J., Foley, D., Gaffen, J., Petitpas, J.: Redesign of a Medical Courier Robot (2013)
Cooper, S., Di Fava, A., Vivas, C., Marchionni, L., Ferro, F.: ARI: the social assistive robot and companion. In: 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), pp. 745–751. IEEE (2020)
de Pádua Ribeiro, L.M., Pereira, J.R., da Silva Quirino, F.G.: Medication logistics in public healthcare: model adopted by the State of Minas Gerais in Brazil. Afr. J. Bus. Manag. 7(31), 3109 (2013)
Deo, N., Anjankar, A.: Artificial intelligence with robotics in healthcare: a narrative review of its viability in India. Cureus 15(5), e39416 (2023). https://doi.org/10.7759/cureus.39416. (in English)
Dewang, H.S., Mohanty, P.K., Kundu, S.: A robust path planning for mobile robot using smart particle swarm optimization. Procedia Comput. Sci. 133, 290–297 (2018)
Diab-El Schahawi, M., et al.: Ultraviolet disinfection robots to improve hospital cleaning: Real promise or just a gimmick? Antimicrob. Resist. Infect. Control 10, 1–3 (2021)
Dwivedi, R., Mehrotra, D., Chandra, S.: Potential of Internet of Medical Things (IoMT) applications in building a smart healthcare system: a systematic review. J. Oral Biol. Craniofacial Res. 12(2), 302–318 (2022)
El Khaili, M.: Visibility graph for path planning in the presence of moving obstacles. System 4(4) (2014)
Elsner, M., Charniak, E.: Extending the entity grid with entity-specific features. In: Proceedings of the 49th Annual Meeting of the Association for Computational Linguistics: Human Language Technologies, pp. 125–129 (2011)
Engedy, I., Horváth, G.; Artificial neural network based local motion planning of a wheeled mobile robot. In: 2010 11th International Symposium on Computational Intelligence and Informatics (CINTI), pp. 213–218. IEEE (2010)
Esan, O., Du, S., Lodewyk, B.: Review on autonomous indoor wheel mobile robot navigation systems. In: 2020 International Conference on Artificial Intelligence, Big Data, Computing and Data Communication Systems (icABCD), pp. 1–6. IEEE (2020)
Sahoo, S.K., Choudhury, B.B.: Challenges and opportunities for enhanced patient care with mobile robots in healthcare. J. Mechatron. Artif. Intell. Eng. (2023)
Farhud, D.D., Zokaei, S.: Ethical issues of artificial intelligence in medicine and healthcare. Iran. J. Public Health 50(11), i–v (2021). https://doi.org/10.18502/ijph.v50i11.7600. (in English)
Fosch-Villaronga, E., Khanna, P., Drukarch, H., Custers, B.: The role of humans in surgery automation. Int. J. Soc. Robot. 15(3), 563–580 (2023). https://doi.org/10.1007/s12369-022-00875-0
Fu, J., et al.: Recent advancements in augmented reality for robotic applications: a survey. Actuators 12(8), 323 (2023)
Fuchsman, P., et al.: Ecological risk analysis for benzalkonium chloride, benzethonium chloride, and chloroxylenol in US disinfecting and sanitizing products. Environ. Toxicol. Chem. 41(12), 3095–3115 (2022)
Fujita, T., Sasaki, T.: Development of hexapod tracked mobile robot and its hybrid locomotion with object-carrying. In: 2017 IEEE International Symposium on Robotics and Intelligent Sensors (IRIS), pp. 69–73. IEEE (2017)
Garcia, M.P., Montiel, O., Castillo, O., Sepulveda, R., Melin, P.: Path planning for autonomous mobile robot navigation with ant colony optimization and fuzzy cost function evaluation. Appl. Soft Comput. 9(3), 1102–1110 (2009)
Gemeinder, M., Gerke, M.: GA-based path planning for mobile robot systems employing an active search algorithm. Appl. Soft Comput. 3(2), 149–158 (2003)
Gielis, J., Shankar, A., Prorok, A.: A critical review of communications in multi-robot systems. Curr. Robot. Rep. 3(4), 213–225 (2022). https://doi.org/10.1007/s43154-022-00090-9
Gómez, E.J., Santa, F.M.M., Sarmiento, F.H.M.: A comparative study of geometric path planning methods for a mobile robot: potential field and voronoi diagrams. In: 2013 II International Congress of Engineering Mechatronics and Automation (CIIMA), pp. 1–6. IEEE (2013)
Guntur, S.R., Gorrepati, R.R., Dirisala, V.R.: Robotics in healthcare: an internet of medical robotic things (IoMRT) perspective. In: Machine Learning in Bio-signal Analysis and Diagnostic Imaging, pp. 293–318. Elsevier (2019)
Guo, S., Diao, Q., Xi, F.: Vision based navigation for omni-directional mobile industrial robot. Procedia Comput. Sci. 105, 20–26 (2017)
Harry, A.: The future of medicine: harnessing the power of AI for revolutionizing healthcare. Int. J. Multidiscip. Sci. Arts 2(1), 36–47 (2023)
Hassan, S., Hannan, A., Khan, S., Abbas, S.: Androidbased UV-C disinfecting mobile unit. Pak. J. Eng. Technol. 4(1), 159–162 (2021)
Holland, J., et al.: Service robots in the healthcare sector. Robotics 10(1), 47 (2021)
Hong, B., Huang, Y., Chen, C.-Y., Wu, P.-C., Chen, W.-C.: Fuzzy neural network based RFID positioning and navigation method for mobile robots, 2013-07-05T00:00:00Z (2013). https://doi.org/10.19026/RJASET.6.3937
Huang, R., Li, H., Suomi, R., Li, C., Peltoniemi, T.: Intelligent physical robots in health care: systematic literature review. J. Med. Internet Res. 25, e39786 (2023). https://doi.org/10.2196/39786
Hurst, N., Clabaugh, C., Baynes, R., Cohn, J., Mitroff, D., Scherer, S.: Social and emotional skills training with embodied moxie. arXiv preprint http://arxiv.org/abs/2004.12962 (2020)
Hussain, K. et al.: Internet of things—cloud security automation technology based on artificial intelligence. In: 2022 International Conference on Applied Artificial Intelligence and Computing (ICAAIC), 2022-05-09T00:00:00Z (2022). https://doi.org/10.1109/ICAAIC53929.2022.9792664
Ingrand, F., Ghallab, M.: Deliberation for autonomous robots: a survey. Artif. Intell. 247, 10–44 (2017). https://doi.org/10.1016/j.artint.2014.11.003
Javaid, M., Haleem, A., Singh, R.P., Suman, R.: Substantial capabilities of robotics in enhancing industry 4.0 implementation. Cogn. Robot. 1, 58–75 (2021). https://doi.org/10.1016/j.cogr.2021.06.001
Joseph, A., Christian, B., Abiodun, A.A., Oyawale, F.: A review on humanoid robotics in healthcare. In: MATEC Web of Conferences, vol. 153, p. 02004. EDP Sciences (2018)
Junaid, S.B., et al.: Recent advancements in emerging technologies for healthcare management systems: a survey. Healthcare (Basel, Switzerland) (2022). https://doi.org/10.3390/healthcare10101940
Kahn, G., Abbeel, P., Levine, S.: Badgr: an autonomous self-supervised learning-based navigation system. IEEE Robot. Autom. Lett. 6(2), 1312–1319 (2021)
Kala, R.: Rapidly exploring random graphs: motion planning of multiple mobile robots. Adv. Robot. 27(14), 1113–1122 (2013)
Kang, M., Lim, C., Lee, J., Choi, E., Lee, S.: Study on obstacle recognition for safe operation of IoT-based hospital logistics robots. J. Korea Internet Broadcast. Commun. Soc. 17(2), 141–146 (2017)
Kästner, L., Zhao, X., Shen, Z., Lambrecht, J.: Obstacle-Aware Waypoint Generation for Long-range Guidance of Deep-Reinforcement-Learning-based Navigation Approaches, arXiv, 2021-09-23T00:00:00Z (2021)
Kastner, L. et al.: A hybrid hierarchical navigation architecture for highly dynamic environments using time-space optimization, 2023-01-17T00:00:00Z (2023). https://doi.org/10.1109/SII55687.2023.10039321
Kelly, J.T., Campbell, K.L., Gong, E., Scuffham, P.: The internet of things: impact and implications for health care delivery. J. Med. Internet Res. 22(11), e20135 (2020). https://doi.org/10.2196/20135. (in English)
Khan, A.A., Bahrami, M., Anwar, Y.: A deep learning based autonomous mobile robotic assistive care giver. In: 2019 IEEE International Conference on E-health Networking, Application & Services (HealthCom), 2019-10-01T00:00:00Z (2019). https://doi.org/10.1109/HEALTHCOM46333.2019.9009600
Koh, W.Q., et al.: "Bridging gaps in the design and implementation of socially assistive technologies for dementia care: the role of occupational therapy. Disabil. Rehabil. Assist. Technol. (2022). https://doi.org/10.1080/17483107.2022.2111610
Kriegel, J., Rissbacher, C., Reckwitz, L., Tuttle-Weidinger, L.: The requirements and applications of autonomous mobile robotics (AMR) in hospitals from the perspective of nursing officers. Int. J. Healthc. Manag. (2021). https://doi.org/10.1080/20479700.2020.1870353
Kristoffersson, A., Coradeschi, S., Loutfi, A.: A review of mobile robotic telepresence. Adv. Hum. Comput. Interact. 2013, 3–3 (2013a)
Kristoffersson, A., Coradeschi, S., Loutfi, A.: A review of mobile robotic telepresence. Adv. Hum. Comput. Interact. (2013b). https://doi.org/10.1155/2013/902316
Kumar, B., Sharma, L., Wu, S.-L.: Job allocation schemes for mobile service robots in hospitals. In: 2018 IEEE International Conference on Bioinformatics and Biomedicine (BIBM), pp. 1323–1326. IEEE (2018)
Kumar, A., Jain, S., Kaushik, K., Krishnamurthi, R.: Patient-centric smart health-care systems for handling COVID-19 variants and future pandemics: technological review, research challenges, and future directions. In: The Internet of Medical Things: enabling technologies and emerging applications, 2021-12-31T00:00:00Z (2021). https://doi.org/10.1049/PBHE034E_CH10
Kyrarini, M., et al.: A survey of robots in healthcare. Technologies 9(1), 8 (2021)
Li, Z., Moran, P., Dong, Q., Shaw, R.J., Hauser, K.: Development of a tele-nursing mobile manipulator for remote care-giving in quarantine areas. In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 3581–3586. IEEE (2017)
Lonner, J.H., Zangrilli, J., Saini, S.: Emerging robotic technologies and innovations for hospital process improvement. In: Robotics in knee and hip arthroplasty: current concepts, techniques and emerging uses, pp. 233–243 (2019)
Luo, G., He, J., Lin, T., Wang, Y.: Development of intelligent old-age medical and health system based on data fusion. In: IACSIT International Journal of Engineering and Technology, 2023-05-01T00:00:00Z (2023). https://doi.org/10.7763/IJET.2023.V15.1222
Masehian, E., Amin-Naseri, M.: A voronoi diagram-visibility graph-potential field compound algorithm for robot path planning. J. Robot. Syst. 21(6), 275–300 (2004)
McGinn, C., et al.: Exploring the applicability of robot-assisted UV disinfection in radiology. Front. Robot. AI (2021). https://doi.org/10.3389/frobt.2020.590306. (in English)
Meghdari, A., et al.: Arash: a social robot buddy to support children with cancer in a hospital environment. Proc. Inst. Mech. Eng. [h] 232(6), 605–618 (2018)
Mettler, T., Sprenger, M., Winter, R.: Service robots in hospitals: new perspectives on niche evolution and technology affordances. Eur. J. Inf. Syst. 26(5), 451–468 (2017)
Miao, H., Tian, Y.-C.: Dynamic robot path planning using an enhanced simulated annealing approach. Appl. Math. Comput. 222, 420–437 (2013)
Michaud, F. et al.: Telepresence robot for home care assistance. In: AAAI Spring Symposium: Multidisciplinary Collaboration for Socially Assistive Robotics, 2007-01-01T00:00:00Z (2007)
Mireles, C., Sanchez, M., Cruz-Ortiz, D., Salgado, I., Chairez, I.: Home-care nursing controlled mobile robot with vital signal monitoring. Med. Biol. Eng. Compu. 61(2), 399–420 (2023)
Mireles, C. et al.: Home-care nursing controlled mobile robot with vital signal monitoring 2022-11-29T00:00:00Z (2022). https://doi.org/10.1007/S11517-022-02712-Y
Mišeikis, J., et al.: Lio-a personal robot assistant for human-robot interaction and care applications. IEEE Robot. Autom. Lett. 5(4), 5339–5346 (2020)
Mohamad, I., Zhu, Y.: Vision-based control of a home companion robot 2016-01-01T00:00:00Z (2016)
Montaner, M.B., Ramirez-Serrano, A.: Fuzzy knowledge-based controller design for autonomous robot navigation. Expert Syst. Appl. 14(1–2), 179–186 (1998)
Neerincx, A., Hiwat, T., de Graaf, M.M.A.: Social robot for health check and entertainment in waiting room: child’s engagement and parent’s involvement, 2021-06-21T00:00:00Z (2021). https://doi.org/10.1145/3450614.3463413
Nguyen, M.S., Than, T.T., Do, T.N., Nguyen, H.N.: Design of elderly-assistant mobile servant robot. Indones. J. Electr. Eng. Comput. Sci. (2022). https://doi.org/10.11591/IJEECS.V26.I3.PP1338-1350
Ohneberg, C., et al.: Assistive robotic systems in nursing care: a scoping review. BMC Nurs. 22(1), 72 (2023). https://doi.org/10.1186/s12912-023-01230-y
Oommen, B., Iyengar, S., Rao, N., Kashyap, R.: Robot navigation in unknown terrains using learned visibility graphs. Part I: The disjoint convex obstacle case. IEEE J. Robot. Autom. 3(6), 672–681 (1987)
Pandey, A.K., Gelin, R.: A mass-produced sociable humanoid robot: pepper: the first machine of its kind. IEEE Robot. Autom. Mag. 25(3), 40–48 (2018)
Park, Y. et al.: Development and usability test of IoT-based mobile applications for persons with mild physical disabilities and their caregivers. In: 2022 19th International Conference on Ubiquitous Robots (UR) (2022). https://doi.org/10.1109/UR55393.2022.9826273
Patle, B., Pandey, A., Parhi, D., Jagadeesh, A.: A review: on path planning strategies for navigation of mobile robot. Def. Technol. 15(4), 582–606 (2019)
Paul, M., Maglaras, L., Ferrag, M.A., Almomani, I.: Digitization of healthcare sector: a study on privacy and security concerns. ICT Express 9(4), 571–588 (2023). https://doi.org/10.1016/j.icte.2023.02.007
Păvăloiu, I.-B., Vasilățeanu, A., Popa, R., Scurtu, D., Hang, A., Goga, N.: Healthcare robotic telepresence. In: 2021 13th International Conference on Electronics, Computers and Artificial Intelligence (ECAI), pp. 1–6. IEEE (2021)
Pequeño-Zurro, A., et al.: Proactive control for online individual user adaptation in a welfare robot guidance scenario: toward supporting elderly people. IEEE Trans. Syst. Man Cybern. Syst. (2023). https://doi.org/10.1109/TSMC.2022.3224366
Pinna, R., Carrus, P.P., Marras, F.: The drug logistics process: an innovative experience. The TQM Journal 27(2), 214–230 (2015)
Prathiba, A., et al.: Tele-robotic recommendation framework using multi-dimensional medical datasets on COVID-19 classification. Int. J. Adv. Appl. Sci. (2022). https://doi.org/10.21833/IJAAS.2022.02.017
Pudchuen, N., Inthiam, J., Jitviriya, W., Phunopas, A., Deelertpaiboon, C., Blattler, A.: Medical telerobotic: IRAPs SHaRE-aGIVeR, 2021-01-21T00:00:00Z (2021). https://doi.org/10.5954/ICAROB.2021.GS7-4
Raje, S., et al.: Applications of healthcare robots in combating the COVID-19 pandemic. Appl. Bionics Biomech. 2021, 1–9 (2021). https://doi.org/10.1155/2021/7099510
Rao, N.S., Iyengar, S., de Saussure, G.: The visit problem: visibility graph-based solution. In: Proceedings. 1988 IEEE International Conference on Robotics and Automation, pp. 1650–1655. IEEE (1988)
Ratta, P., Kaur, A., Sharma, S., Shabaz, M., Dhiman, G.: Application of blockchain and internet of things in healthcare and medical sector: applications, challenges, and future perspectives. J. Food Qual. 2021, 7608296 (2021). https://doi.org/10.1155/2021/7608296
Rejeb, A., et al.: The Internet of Things (IoT) in healthcare: taking stock and moving forward. Internet Things 22, 100721 (2023). https://doi.org/10.1016/j.iot.2023.100721
Richert, A., Schiffmann, M., Yuan, C.: A nursing robot for social interactions and health assessment. Adv. Intell. Syst. Comput. (2019). https://doi.org/10.1007/978-3-030-20467-9_8
Rohini, S., Sneha, C., Varshitha, S., Yashodha, G., Rohith, H., Bhagya, M.:An Automated External Defibrillator in Robotics Ambulance (2019)
Rubio, F., Valero, F., Llopis-Albert, C.: A review of mobile robots: concepts methods theoretical framework, and applications. Int. J. Adv. Robot. Syst. 16(2), 1729881419839596 (2019). https://doi.org/10.1177/1729881419839596
Rubio, F., Valero, F., Llopis-Albert, C.: A review of mobile robots: concepts, methods, theoretical framework, and applications. Int. J. Adv. Robot. Syst. 16, 172988141983959 (2019). https://doi.org/10.1177/1729881419839596
Samani, H., Zhu, R.: Robotic automated external defibrillator ambulance for emergency medical service in smart cities. IEEE Access 4, 268–283 (2016)
Schulz, A.P., et al.: Results of total hip replacement using the Robodoc surgical assistant system: clinical outcome and evaluation of complications for 97 procedures. Int. J. Med. Robot. Comput. Assist. Surg. 3(4), 301–306 (2007)
Shabbir, J., Anwer, T.: A survey of deep learning techniques for mobile robot applications. arXiv preprint https://arxiv.org/abs/1803.07608 (2018)
Shahri, S.M.Z., Sayyedalhosseini, S.: Use of medical micro and nano robots in telemedicine in COVID-19, 2021-01-01T00:00:00Z (2021)
Shao, M., Lee, J.Y.: Development of autonomous navigation method for nonholonomic mobile robots based on the generalized Voronoi diagram. In: ICCAS 2010, pp. 309–313. IEEE (2010)
Shin, M.H., McLaren, J., Ramsey, A., Sullivan, J.L., Moo, L.: Improving a mobile telepresence robot for people with Alzheimer disease and related dementias: semistructured interviews with stakeholders. JMIR Aging (2022). https://doi.org/10.2196/32322
Siala, H., Wang, Y.: SHIFTing artificial intelligence to be responsible in healthcare: a systematic review. Soc. Sci. Med. 296, 114782 (2022). https://doi.org/10.1016/j.socscimed.2022.114782
Smith, M.W., Rahn, K.A., Shugart, R.M., Belschner, C.D., Stout, K.S., Cheng, I.: Comparison of perioperative parameters and complications observed in the anterior exposure of the lumbar spine by a spine surgeon with and without the assistance of an access surgeon. Spine J. 11(5), 389–394 (2011)
Soriano, G.P., et al.: Robots and robotics in nursing. Healthcare (Basel, Switzerland) (2022). https://doi.org/10.3390/healthcare10081571. (in English)
Stoumpos, A.I., Kitsios, F., Talias, M.A.: Digital transformation in healthcare: technology acceptance and its applications. Int. J. Environ. Res. Public Health (2023). https://doi.org/10.3390/ijerph20043407. (in English)
Sunny, M.S.H., Hossain, E., Mimma, T.N., Hossain, S.: An autonomous robot: using ANN to navigate in a static path. In: 2017 4th International Conference on Advances in Electrical Engineering (ICAEE), pp. 291–296. IEEE (2017)
Tan, S.Y., Taeihagh, A., Tripathi, A.: Tensions and antagonistic interactions of risks and ethics of using robotics and autonomous systems in long-term care. Technol. Forecast. Soc. Change 167, 120686 (2021). https://doi.org/10.1016/j.techfore.2021.120686
Tomlinson, Z., Tomlinson, Z.: Medical robots that are changing the world. October 11, 2018 (2018)
Xuan, K., Zhao, G., Taniar, D., Safar, M., Srinivasan, B.: Voronoi-based multi-level range search in mobile navigation. Multimed. Tools Appl. 53(2), 459–479 (2011)
Yew, G.C.K.: Trust in and ethical design of carebots: the case for ethics of care. Int. J. Soc. Robot. 13(4), 629–645 (2021). https://doi.org/10.1007/s12369-020-00653-w
Yudha, H.M., Dewi, T., Hasana, N., Risma, P., Oktarini, Y., Kartini, S.: Performance comparison of fuzzy logic and neural network design for mobile robot navigation. In: 2019 International Conference on Electrical Engineering and Computer Science (ICECOS), pp. 79–84. IEEE (2019)
Zardiashvili, L., Fosch-Villaronga, E.: Oh, dignity too?” Said the robot: human dignity as the basis for the governance of robotics. Mind. Mach. 30(1), 121–143 (2020)
Zeadally, S., Siddiqui, F., Baig, Z., Ibrahim, A.: Smart healthcare. PSU Res. Rev. 4(2), 149–168 (2020). https://doi.org/10.1108/PRR-08-2019-0027
Zeng, Z., Chen, P.-J., Lew, A.A.: From high-touch to high-tech: COVID-19 drives robotics adoption. Tour. Geogr. 22(3), 724–734 (2020)
Zhou, F., Wang, X., Goh, M.: Fuzzy extended VIKOR-based mobile robot selection model for hospital pharmacy. Int. J. Adv. Rob. Syst. 15(4), 1729881418787315 (2018)
Zhu, A., Yang, S.X.: Neurofuzzy-based approach to mobile robot navigation in unknown environments. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 37(4), 610–621 (2007)
Zhu, K., Zhang, T.: Deep reinforcement learning based mobile robot navigation: a review. Tsinghua Sci. Technol. 26(5), 674–691 (2021)
Funding
This research received no external funding.
Author information
Authors and Affiliations
Contributions
The individual contributions of this research review are as follows; “Conceptualization, methodology, validation, supervision, original draft preparation writing and review GAK; mobile robot assessments, AAG; classification of sensor systems, mobile robot applications, project review administration, HA, investigation, resources, data curation, writing—original draft preparation writing—review and editing, ATH. All authors have read and agreed to the published version of the manuscript”.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there are no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kebede, G.A., Gelaw, A.A., Andualem, H. et al. Review of the characteristics of mobile robots for health care application. Int J Intell Robot Appl 8, 480–502 (2024). https://doi.org/10.1007/s41315-024-00324-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41315-024-00324-3