
Abstract
This study aims to improve the retrieval and mapping of turbidity in optically shallow waters using satellite data by detecting then masking bottom-contaminated pixels. The methodology is developed based on multi-spectral Sentinel-2 MSI and hyper-spectral PRISMA high spatial resolution satellite data recorded over the lagoon and bay of Bizerte (Tunisia) and match-ups with field optical measurements. A mask is created to distinguish shallow water (bottom-contaminated) pixels from deep waters or turbid water pixels, using the water-leaving reflectance signal in the near-infrared spectral region (rhow_704 nm) with an empirically derived threshold value of 0.02. Match-ups between field and satellite data clearly identify rhow_560 (green spectral band of Sentinel-2 MSI) as the best proxy for water turbidity in the study area, using a robust empirical regional relationship. The satellite-derived turbidity values show a good agreement with in-situ measurements, with a coefficient of determination (R2) of 0.88 and a root mean square error (RMSE) of 0.122 NTU. These results highlight the reliability and accuracy of the turbidity algorithm, but also the efficiency of the shallow water (bottom contamination) mask, even though conditions with highly turbid waters in the bay or lagoon were not captured on available satellite images. They provide valuable quantitative insights for assessing water quality and improving understanding of the impact of human activities on marine ecosystems.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Mediterranean inland waters represent sensitive ecosystems under the influence of both terrestrial and marine environments, highly impacted by climate change, freshwater inputs and human activities. These environments undergo intensive anthropogenic pressure (shellfish farming, industries, tourism, power stations). They receive direct inputs from rivers (turbid and nutrient-rich freshwater) and are connected to the sea, which makes their shallow water masses complex in terms of physical, biogeochemical and optical properties.
Continuous monitoring of water quality, ecosystem evolution, and the assessment of the depollution actions impact needed the establishment of long-term field surveys. However, these surveys are time-consuming, expensive, and limited in terms of spatio-temporal coverage. This is where ocean color remote sensing observations can significantly contribute, given their current technical specifications (Markogianni et al. 2014; Ruddick et al. 2019; Erena et al. 2019) in terms of spatial, temporal, spectral and radiometric resolutions adapted to generate daily maps of key optical and biogeochemical parameters linked to the water quality: turbidity, water transparency, concentrations of suspended particulate matter, phytoplankton and cyanobacteria (i.e., chlorophyll and carotenoid pigments), colored dissolved organic matter (CDOM), organic and inorganic nutrients, pesticides, metals, thermal releases, macrophytic algae, pathogens, and oils (Giardino et al. 2013). To enhance the accuracy of remote sensing retrievals, several authors have opted for the classification method based on spectral signature analysis to classify optically complex waters. For example, they have used this method with POLDER, Sentinel-2A, and MERIS (Shen et al. 2015) to classify optically active substances in water bodies. In addition, this approach has been used for other purposes such as classifying the optical variability for water quality (Eleveld et al. 2017) or estimating chlorophyll-a in optically complex waters (Le et al. 2011).
Several studies provide strong evidence on the limitations of ocean color algorithms in optically complex inland waters and coastal lagoons. Ruddick et al. (2000) highlighted the challenges associated with the detection and correction of bottom contamination and adjacency effects on remotely sensed ocean color measurements. Kutser (2012) investigated the diversity and high concentrations of algal and non-algal particles in coastal waters, which make accurate retrieval of water quality parameters difficult. Similarly, Tyler et al. (2016), Dogliotti et al. (2015) and Palmer et al. (2015) have also documented the limitations of existing algorithms in these optically complex environments.
Despite the recent evolution of ocean color data and processing methodologies for the extraction of quantitative information within the water column, the results are still limited and not automated in the case of optically-shallow inland waters. In such waters, ocean color products are very sensitive to various sources of spectral disturbances in satellite data caused by atmospheric effects (due to the diversity of aerosols), sunglint (Kay et al. 2009; Tavares et al. 2021), adjacency effects (Bulgarelli et al. 2014) and also by the effect of the bottom reflection (IOCCG 2000). Other studies consider these environments as continental and have opted to use high spatial resolution satellite data to map and classify the sea bottom, using acoustic ground discrimination systems (Freitas et al. 2005) or different classification methods (Vahtmäe and Kutser 2007; Wilson et al. 2020; Wattelez et al. 2022; Wang et al. 2018).
Other satellite data processors have been developed to apply atmospheric and glint corrections to retrieve the water reflectance signal then estimate several key water quality products, such as ACOLITE (Vanhellemont and Ruddick 2016, 2021), C2RCC (Soriano-González et al. 2022; Windle et al. 2022; Warren et al. 2019), POLYnomial-based algorithm applied to MERIS (Polymer) (Soppa et al. 2021; Steinmetz and Ramon 2018), iCOR algorithm also applied and validated to coastal and inland water (Keukelaere et al. 2018).
As for the atmospheric correction protocol for Moderate-Resolution Imaging Spectroradiometer MODIS Aqua to generate Level-2 products, these products include a wide range of quality flags and masks that indicate the quality of the algorithm and the data, such as: ATMFAIL (Atmospheric correction failure), HIGLINT (Sunglint, reflectance exceeds the threshold), COASTZ (Pixel is in shallow water), among others. These flags provide information about the quality of the satellite products and help to identify potential issues and limitations in the algorithm's performance. The flags can be accessed via the Ocean Color website (https://oceancolor.gsfc.nasa.gov/atbd/ocl2flags/) and are an important tool for data validation and analysis. The comparison with AERONET-OC data allows to check the accuracy of the atmospheric correction and the MODIS Aqua level-2 products. Despite the performance of these algorithms in many areas of study, they remain limited in optically complex waters, particularly in very shallow waters, resulting in overestimation of the water reflectance and the concentration of the derived water quality products.
In this study, a methodological approach is presented for turbidity mapping, mask creation, and classification of shallow waters in optically complex coastal environments of the study areas in Bizerte lagoon and bay, Tunisia.
The focus is on comparing two sensor platforms: the Sentinel-2 MSI multispectral sensor and the PRISMA hyperspectral sensor, along with the evaluation of two atmospheric correction algorithms (C2RCC and ACOLITE). The process involves the development and validation of a dynamic mask for detecting shallow water areas, as well as the calibration and validation of an algorithm for quantifying water turbidity.
The paper is organized as follows: in the first section, the study areas, datasets and the workflow adopted are presented. The performance of two atmospheric correction algorithms is examined in the following section when retrieving the water reflectance from S2-MSI and PRISMA satellite data. The second section is devoted to the development, testing and validation of a novel mask for optically shallow waters. The best algorithms for extracting the water turbidity are then identified, and validation results of satellite-derived products using in-situ turbidity data are presented. Lastly, a supervised spectral angel mapper classification of shallow water is presented.
2 Materials and Methods
2.1 Study Area
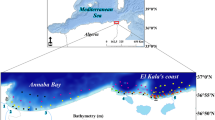
Bizerte is located at the northern facade of Tunisia and forms with its periphery of Cape Enjla the most advanced point of Africa with a latitude of 37°16′27″ North and a longitude of 9°52′26″ East. The region of Bizerte is well known for the strategic position it occupies in the center of the Mediterranean region. The Bizerte lagoon and bay, (see Fig. 1) located in the north of Tunisia, constitute a receptacle that drains all the water of the upstream watershed. The occurence of phytoplankton blooms, sometimes toxic, has become increasingly regular in response to the multiple discharges that flow into it (MAERH 2003); Hlaili et al. 2006). The lagoon covers an area of 128 km2 (maximum width is 11 km and maximum length is 13 km) with an average depth of 7 m. It communicates with the sea through a 6 km long channel which is 0.8 km wide and 12 m deep. The lagoon drains a watershed of about 380 km2 via several wadis. It is connected in its eastern part to a second body of water, Lake Ichkeul, through the channel Tinja which is about 5 km long and a few meters deep (3 m during flood periods).

Map of the study areas: the Bizerte lagoon and Bizerte Bay, in Tunisia. White circles locate the in-situ measurement stations
The canal is currently equipped with locks to manage exchanges between Lake Ichkeul and the Bizerte lagoon (Bejaoui et al. 2010). The climate of the region of Bizerte is Mediterranean type with sub-humid nuances: hot and dry summers and mild and rainy winter.
2.2 Sentinel-2 MSI, PRISMA Satellite Dataset
Sentinel-2 is a polar-orbiting, multispectral high-resolution imaging satellite mission developed by the European Space Agency (ESA) for land and coastal environment monitoring. This imaging mission captures data from thirteen distinct spectral bands using the MSI sensor which covers both the visible plus near-infrared (VNIR) and ShortWave InfraRed (SWIR) spectral regions (Drusch et al. 2012). Compared with similar multi-spectral satellite sensors, the resolution of Sentinel-2 MSI is impressive. Four bands have a spatial resolution of 10 m, six of 20 m, and three of 60 m. Thus, this mission has the ability to collect detailed imagery, enabling to study and analyze a wide variety of features on the Earth's surface.
The PRISMA (PRecursore IperSpettrale della Missione Applicativa) mission is an innovative mission of ASI (Agenzia Spaziale Italiana). It is a medium-resolution hyperspectral (230 bands in the VNIR and the SWIR) sensor designed to collect hyperspectral images in the VNIR spectral range with a swath width of 30 km and a spatial resolution of 30 m (Loizzo et al. 2018). This resolution is higher than that of traditional remote sensing instruments, and it allows capturing detailed and accurate information about the Earth’s surface. Furthermore, the mission is designed to collect data from both the land and coastal ocean surfaces, providing valuable data for a wide range of applications, such as land cover/use mapping, coastal zone management, pollution monitoring and natural resource management.
The choice of Sentinel-2 and PRISMA satellite data to map the turbidity and create a shallow water mask in inland waters, specifically in the Bizerte lagoon and bay, was based on their technical specifications.
Sentinel-2 was selected for its advanced imaging capabilities optimized for land monitoring. The satellite provides high-resolution multispectral images with a wide spectral coverage. Its high spatial resolution allows for the identification of small-scale variations in optically shallow waters. Additionally, combining Sentinel-2A and 2B observations provides a rather short revisiting time (4 days) which is crucial for monitoring dynamic near-shore environments.
The inclusion of PRISMA in the study was driven by its high spectral resolution, capturing a broader range of spectral bands compared to Sentinel-2. These additional spectral bands, with a spatial resolution of 30 m, provide detailed spectral signatures of the water optical properties. Such high spectral resolution may be required to distinguish shallow and turbid waters.
The combined use of Sentinel-2 and PRISMA offers complementary advantages by combining high spatial resolution with detailed spectral information. This approach allows the identification of areas where the seafloor is visible, the optical classification of water masses and precise mapping of turbidity levels in optically shallow waters.
Table 1 summarizes the specifications of the PRISMA and Sentinel-2 satellite sensors respectively.
For this study, all cloud-free Sentinel-2 MSI data over the year 2021 were used, as well as the only PRISMA image from July 20, 2021.
2.3 In-situ Data
When the Sentinel-2 MSI satellite passed over the bay and lagoon of Bizerte on May 23, June 14, August 28, July 2 and December 24 2021, five measurement sessions were conducted at sea. Turbidity and water transparency were measured (see Table 2).
A Secchi disk was used to measure the water transparency. This object is a metal disk with a circumference of roughly 20 cm. It is fastened to a descending string. On the side of the boat that is shaded, the Secchi disk was dipped into the water to determine the depth at which it disappears.
The water turbidity (TU) was measured using the "Turb 550 IR" instrument at the Private GREENLAB laboratory on the same day the water samples were collected. This instrument has a measurement range of 0–1000 NTU (Nephelometric Turbidity Unit), a resolution of 0.1 NTU in the measurement range of 0.1–9.99 NTU, a precision of 2% of the measured value or 0.1 NTU, and an uncertainty of the order of 0.003 NTU. Table 2 summarizes the minimum and maximum turbidity and Secchi depth values measured during the sampling missions conducted in the lagoon and the bay of Bizerte.
2.4 Method
The processing workflow for Sentinel-2 MSI and PRISMA 2021 data to map turbidity in inland waters (see Fig. 2) is a complex process that requires multiple steps to ensure accuracy and reliability. The first step is the application and testing of atmospheric corrections using the ACOLITE and C2RCC methods. This is followed by correcting for glint effects, which is caused by the reflection of sunlight at the air/water interface. This step is crucial to ensure that the satellite imagery accurately reflects the signal from the water column, especially since most images are affected by sunglint. The next step involves the extraction and analysis of water spectral signatures to characterize shallow water surfaces. This step is important to identify shallow water areas and to accurately measure water turbidity. Identification of the wavelength that records information from very shallow water, setting a threshold, and extracting a mathematical formula for creating a specific mask for these environments is also necessary. The overlay of satellite products and in-situ measurements based on statistical parameters is then used to calibrate a semi-empirical regional algorithm and validate the derived products. Finally, the derived product is validated based on additional match-ups between satellite and field data, considering the coefficient of determination R2 of the best-fitted linear relationship and the average quadratic error RMSE to ensure that the product is accurate and reliable.

Flowchart of satellite data processing and turbidity mapping for inland water
2.4.1 Atmospheric Correction Algorithms
2.4.1.1 ACOLITE
The Atmospheric Correction for OLI "lite" (ACOLITE) method was developed by the Royal Belgian Institute of Natural Sciences for marine applications (Vanhellemont and Ruddick 2016) supporting free atmospheric correction and processing for coastal and inland waters. ACOLITE aims to make this step reliable and simple to use for high-resolution satellite data such as Landsat (5/7/8/9) and Sentinel-2 MSI (A/B), Planet Scope and RapidEye, Venus, SPOT and Pléiades, Worldview. The atmospheric adjustment process used by ACOLITE typically involves two steps:
(1) Using a look-up-table created with the aid of 6SV, Rayleigh correction for air molecule scattering is applied (Nechad et al. 2010).
(2) The correction for aerosols is based on the hypothesis of black SWIR bands on water caused by extremely high pure water absorption and an exaggerated spectrum for aerosol reflectance.
All Sentinel-2 MSI and PRISMA satellite data were preprocessed using the ACOLITE algorithm by setting the glint correction. The products used for postprocessing are L2R, containing the top-of-atmosphere reflectance (rhot) and the surface-level reflectance after atmospheric correction (rhos).
2.4.1.2 C2RCC
The C2RCC methodology (Case 2 Regional CoastColour) relies on a large database of inverse radiative transfer simulations by neural networks. The algorithm is available on the SNAP toolbox software.
The C2RCC atmospheric correction is a full-spectrum version using a set of neural networks trained on simulated top-of-atmosphere reflectance. The radiative transfer simulations include the complete oceanic and atmospheric system, meaning that a specific water model is included in the simulations. C2RCC is used to generate the Case 2 water products for several satellite sensors including Sentinel-3 OLCI, Sentinel-2 MSI, Landsat-8 OLI, MERIS, MODIS, VIIRS and SeaWiFS.
The generated products are the water reflectance, the inherent optical properties (IOPs, i.e., the absorption and backscattering coefficients of the colored water constituents); the three main optically active water constituents (on top of water molecules) are the phytoplankton pigments, total suspended matter, and yellow substances (Zhang et al. 2021).
Different atmospheric correction algorithms for S2-MSI in optically complex and turbid waters were evaluated based on the study conducted by Renosh et al. (2020).
ACOLITE was identified as the best performing algorithm to retrieve rhow (dimensionless water reflectance) values in the red and NIR bands in highly turbid waters, while C2RCC performed better in moderately turbid inland waters. Therefore, both correction algorithms were tested in our study area.
2.4.2 Extraction of Turbidity and Match-up Dataset
For the turbidity estimation, the semi-empirical single band turbidity (T) retrieval algorithm of Nechad et al. (2010) was first considered. It relates turbidity and marine reflectance at a specific wavelength (λ), defined as πLw(λ) / Ed0 + (λ), where Lw is the water-leaving radiance and Ed0 + is the above-water downwelling irradiance, according to Eq. (1).
where AλT and Cλ are two wavelength-dependent calibration coefficients. In the present study, the algorithm focuses on the 859 nm band for medium to high turbidity values and on the 645 nm band for low turbidity values, with a linear weighting function applied to the modeled T for ρw (645) ranging between 0.05 and 0.07. The final formula for blending the two algorithms is:
where T645 is the turbidity calculated using the 645 nm band and T859 is the turbidity calculated using the 859 nm band (Dogliotti et al. 2015). The results of these two algorithms proved to be quite different from the turbidity measured in- situ. Therefore, to determine the best algorithm, validate the products and quantify the associated uncertainties, in-situ data were matched with corresponding satellite products. The permissible time range for match-ups was initially set to 9:00–11:00 (UTC), and the central satellite pixel was co-located with each in-situ data. The match-ups were recognized by the nearest latitude and longitude, which were taken from a 3 × 3 pixels window. To describe the relation between the Sentinel-2 MSI waveband and the in-situ data, a set of statistics was produced for the match-up study. This comprised the mean absolute percentage difference, the root means square difference (RMSD), and the mean relative difference, as well as the square of the Pearson product correlation (R2, the coefficient of determination).
2.4.3 Spectral Signatures and Classifications
The spectral signatures of natural waters result from illumination conditions and depend on the light absorption and backscattering coefficients of the colored water constituents, which are the inherent optical properties of water molecules, algal and non-algal suspended particles and colored dissolved organic matter. The spectral signatures of shallow waters may also result from the bottom albedo seen or detected through the water column. Extensive research has investigated the spectral signatures of riverine (Mertes et al. 1993), lake (Kutser 2012) and coastal waters, using different techniques of spectral shape analyses (Ngoc et al. 2019). Additionally, Spyrakos et al. (2018) employed a functional analysis of in-situ hyperspectral reflectance measurements to establish an optical water typology, revealing the spectral variability of inland and coastal waters.
In the present study, the first aim was to characterize the spectral signatures of the study area to distinguish different optical environments. In fact, shallow coastal waters are frequently contaminated by sea-bottom reflectance, which hinders the application of satellite products for their environmental monitoring. More specifically, sea-bottom reflectance usually leads to an overestimation of water quality parameters. Therefore, several models have been developed, such as the shallow water analytical model (SWAM) which computes the mapping habitats and water depth by inversion of bio-optical models. It is based on a modified processor version of Sambuca (Wettle and Brando 2006). The Shallow Water Inversion Model (SWIM) algorithm designed to improve retrievals of inherent optical properties (IOPs) in optically shallow waters also accounts for light reflected off the seafloor (McKinna et al. 2015). Another solution is the relative water depth tool which uses an algorithm developed by Stumpf et al. (2003) to generate a map of relative water depths for a given area. The algorithm is bottom albedo independent, meaning that dark and light sea floors are shown to be at the same depth when they are actually at the same depth. The results are relative and cannot be used for navigation, but rather to give a general feel for the bathymetry. These models are based on bathymetric data, which in some cases can be erroneous as they do not consider hydrodynamic parameters such as tides, swell, wind, etc. The use of spectral signatures derived from remote sensing imagery is a powerful tool for analyzing the optical properties of water bodies. In the present study, the aim was to identify and characterize different types of water environments based solely on the spectral behavior of the remote sensing reflectance signal at specific wavelengths. This approach allows to overcome the limitations associated with traditional methods that require bathymetric data for accurate classification. By analyzing the unique patterns of light backscattering and absorption by water at different wavelengths, the objective was to discriminate shallow and deep waters, then to estimate different levels of water turbidity. The ability to identify very shallow water depths from the image itself at the time of satellite data acquisitions is, particularly, important for environmental monitoring.
3 Results
3.1 Empirical Turbidity Algorithm Calibration
The turbidity algorithm for the Bizerte lagoon and bay was empirically calibrated considering the spectral bands 490, 560, 665, 708 and 756 nm of the Sentinel-2 MSI satellite sensor, using the atmospheric corrections C2RCC and ACOLITE. Figures 3 and 4 show the respective relationships obtained for these two atmospheric corrections. On both cases, results show that in-situ turbidity has a good correlation (R2 > 0.7) with rhow_560, and an RMSE of 0.31 NTU, which is better than the other tested relationships. Therefore, the following equation was derived:

a Empirical relationship established between field-measured water turbidity (TU) and satellite-derived (ACOLITE) rhow_560, based on match-ups in the lagoon and bay of Bizerte. b Comparison between satellite-derived and in-situ turbidity based on 9 additional match-ups

a Empirical relationship established between field-measured water turbidity (TU) and satellite-derived (C2RCC) rhow_560, based on match-ups in the lagoon and bay of Bizerte. b Comparison between satellite-derived and in-situ turbidity based on 9 additional match-ups
To validate Eq. (3), nine other in-situ measurements were collected simultaneously with Sentinel-2 MSI satellite data acquisitions. The estimated turbidity values were consistent with the in-situ measurements, with a coefficient of determination R2 of 0.88 and an RMSE of 0.122 NTU. The results are promising and indicate that the rhow_560 band of Sentinel-2 MSI is the most appropriate (best sensitivity) for estimating the water turbidity in the Bizerte lagoon and bay, as the determination coefficient R2 and RMSE were both higher than the other tested relationships. This reinforces the reliability and accuracy of the algorithm.
Despite the similar statistical results obtained, the ACOLITE atmospheric correction was selected instead of the C2RCC one because of its ability to correct for sunglint effects, rather than simply masking them as C2RCC does. Correcting for sunglint is essential for ensuring the accuracy and reliability of images used in the calibration of local turbidity algorithms. Additionally, ACOLITE is an open-source software that provides users with access to its source code, allowing the customization to meet specific research needs. These features make ACOLITE the preferred choice in the present study.
3.2 Shallow Water Mask
The spectral signature of natural waters is directly related to the interaction of various optical phenomena at the air/water interface, within the water column, with also potential bottom effects in shallow waters. They are dependent on the surface agitation due to wind and waves, the presence of floating hydrocarbon pollutants or macro-debris, the mixing of water with different buoyancy densities and temperatures (freshwater and saltwater), currents, suspended sediment loading, the presence of phytoplankton and chlorophyll pigments or dissolved substances in the water (Palmer et al. 2015). The red (1) and orange (2) curves (Fig. 5) represent typical shallow water reflectance spectra, respectively, for dark sandy and muddy bottoms, derived from PRISMA satellite data corrected for atmospheric effects using ACOLITE. Both spectra show a sudden increase from the wavelength of 700 nm and then a decrease at 750 nm in the form of a bell-shaped curve between 750 and 840 nm with a peak at 800 nm. It is important to note that these curves are present on all surfaces with very shallow water in the Bizerte lagoon. The green curve (3) corresponds to shallow water of 1.5 m with a light sandy bottom in the bay. The green curve displays a spectral profile that is comparable to the red and orange ones in the visible range, but it deviates sharply at 571 nm with a distinct increase. The spectral response of the water column is very useful information at the land–sea interface and at the seawater mass. The spectral behavior mainly depends on the bathymetry, the nature of the bottom, and the color of the water. It is important to note that PRISMA data have been very beneficial for this study as they have allowed to reconstitute whole reflectance spectra despite the narrow spectral bands of the sensor. However, only 11 spectral bands (515, 523, 531, 538, 546, 555, 563, 571, 579, 588, and 596 nm) have satisfactory radiometric quality, while the majority of the other bands have stripes that limit their exploitation. Therefore, only spectral signatures from 515 to 596 nm were considered as a basis for creating a shallow water mask, i.e., to identify shallow water areas in the lagoon. Such information is useful for various applications such as navigation, fishing, and water quality monitoring.

PRISMA-derived surface reflectance spectra for three types of shallow water pixels (July 20, 2021)
To better understand the spectral behavior of different environments, the spectral signature of a wide diversity of pixels was extracted from multiple Sentinel-2 MSI images. Figure 6 presents an example of spectral behavior from 50 pixels extracted from four different environments, including turbid waters, shallow bays, shallow lagoons, clear water bays and clear water lagoons from four different Sentinel-2 MSI images recorded in 2021.

Water reflectance spectra of different water types in the lagoon and bay of Bizerte extracted from 4 Sentinel-2 MSI images
This detailed analysis of spectral signatures extracted from Sentinel-2 MSI and PRISMA satellite data allows identifying the wavelength(s) that detect(s) shallow water pixels in the study area. These pixels systematically show a sharp decrease of water reflectance at the 704 nm band (first condition), when using a threshold value of 0.02 as the second condition (i.e., when rhow_704 > 0.02, see Fig. 6). This finding is important for understanding the spectral behavior of shallow water bodies and eliminating the phenomenon of seabed contamination that often leads to an overestimation of water quality parameters when no bathymetric information is available to predict it.
Indeed, based on these two conditions, a mask is created to distinguish on satellite data shallow water pixels from deep and turbid water pixels with moderate or high levels of turbidity. This relationship is based on the analysis of the 704 nm band with a threshold value of 0.02. The Eq. (4) can be represented as follows:
Figure 7 represents the condition of Eq. (4) and shows rhow_704 maps derived from Sentinel-2 MSI data in the lagoon and bay of Bizerte. Regions with very shallow water depths coincide with a rhow_704 threshold value lower than 0.02. These regions are characterized by different bottom types, such as dark muddy bottoms, benthic algal bottoms, or even clear sand bottoms. In all cases, these surfaces and pixels were still identified in all the processed satellite images.

Satellite-derived maps of a, b, c Rhow_704 (Sentinel-2 MSI product) and d Rhow 709 (PRISMA product
Figure 8 presents the results obtained when applying the shallow water mask (Eq. 4) on satellite products over the study area, thereby masking the shallow areas considered as terrestrial and not marine environment. This mask is of great importance because these regions must be identified from the image itself, without relying on models based on bathymetric data. In this way, these surfaces will be excluded when estimating water quality parameters from satellite data and, therefore, will not lead to an overestimation of retrieved concentrations of colored substances within the water column. This masking step ensures the reliability and accuracy of the satellite-derived water quality parameters.

a Shallow water mask applied to a Rhow704 (Sentinel-2 MSI) and b Rhow 709 (PRISMA) maps
3.3 Turbidity Maps
To demonstrate the efficiency and robustness of the developed processing and highlight the crucial need of a shallow water mask, turbidity maps in the Bizerte lagoon and bay were generated from S2-MSI satellite data recorded on three different dates: March 26th 2021, August 28th 2021 and December 24th 2021. Turbidity values were obtained applying the TUR_Dogliotti and TUR_Bizerte algorithms to satellite data corrected for atmospheric effects using ACOLITE and applying the shallow water mask (Fig. 9). The resulting maps provide a clear representation of the distribution of water turbidity in the region, highlighting areas of high and low turbidity levels. The use of the shallow water mask improves the validity of the estimated turbidity values by flagging the shallow water pixels which are not detected by the ACOLITE processing and the application of the TUR_Dogliotti algorithm. These maps are crucial for monitoring the water quality in the region, so that the results obtained provide valuable insights into the dynamics of turbidity levels in the Bizerte lagoon and bay over time.

Turbidity maps in the lagoon and bay of Bizerte on 26 March 2021, 28 August 2021 and 24 December 2021 obtained by applying the TUR_Dogliotti and TUR_Bizerte algorithms with the shallow water mask. White areas correspond to land and glint-flagged pixels
This process clearly illustrates how the shallow water mask can improve the accuracy of turbidity retrieval by reducing and localizing areas that are prone to errors and would, therefore, lead to an overestimation of the optical properties of the water column. The results obtained (satellite-derived turbidity maps) show a good agreement with those obtained in previous marine biology studies conducted in the Bizerte lagoon. Specifically, during the winter months, the concentrations of suspended particulate matter at the mouth of the Tinja canal is significantly higher than in other areas of the lagoon (Bejaoui et al. 2010). These higher concentrations are due to the significant influx of suspended matter transported by the Tinja canal, and are clearly captured in the processed satellite images of March and April 2021.
4 Classification
To classify the water masses in the study area, the spectral signatures previously extracted and shown in Figs. 6 and were used. This was achieved through the application of the Spectral Angle Mapper (SAM) classification technique. SAM is a physically-based spectral classification method that utilizes an n-D angle to match pixels to reference spectra. The algorithm determines spectral similarity by calculating the angle between two spectra, treating them as vectors in an n-D space with dimensionality equal to the number of bands. Since SAM operates on calibrated reflectance data, it is relatively insensitive to illumination and albedo effects. SAM's endmember spectra can be sourced from ASCII files or spectral libraries, or extracted directly from an image (such as ROI average spectra). In an n-D space, SAM compares the angle between the endmember spectrum vector and each pixel vector, with smaller angles indicating closer matches to the reference spectrum. Any pixels that fall beyond the specified maximum angle threshold in radians are not classified (Kruse et al. 1993; Chakravarty et al. 2021).
To enhance the ability to identify regions with extremely shallow water in the study area, specific spectral signatures from both shallow water bay and shallow water lagoon were merged. Figure 10 presents the results of the SAM classification of inland waters for the Bizerte lagoon and bay, using Sentinel-2 MSI data from March 26 2021 (Fig. 10a) and PRISMA data from July 20 2021 (Fig. 10b). The results are very interesting as they accurately delineate areas with very shallow waters based solely on the spectral signatures. Despite its hyperspectral nature, PRISMA's results are of lower quality compared to Sentinel-2 MSI ones, which demonstrates the better radiometric and spatial quality of Sentinel-2 MSI data in the study area.

Inland water SAM classification for the lagoon and Bay of Bizerte on (a) Sentinel-2 MSI (March 26 2021) and (b) PRISMA (July 20 2021)
5 Discussion
This study described the methodology used to create a shallow water mask, estimate turbidity and, then, classify the shallow waters in the Bizerte lagoon and bay using Sentinel-2 MSI and PRISMA satellite data. A detailed analysis of the spectral signatures of water masses was carried out to create a shallow water mask using the water-leaving reflectance signal at 704 nm and a threshold of 0.02. This mask is useful for accurately locating and masking shallow water areas with significant bottom contamination. Such a mask is required in shallow water areas to prevent the overestimation of water quality parameters estimated from satellite data within the water column. An empirical regional algorithm for the Bizerte lagoon was presented in the study, specifically designed for Sentinel-2 MSI satellite data, and corrected for atmospheric effects using the C2RCC or ACOLITE methods. The effectiveness of the rhow_560 band for turbidity retrieval was demonstrated, establishing a robust empirical relationship with an R2 of 0.7 and an RMSE of 0.31 NTU. Validation of the satellite-derived water turbidity values was conducted through match-ups with field measurements during satellite data acquisitions, confirming the reliability and accuracy of the TU_Bizerte algorithm.
The results of turbidity mapping in the Bay and Lagoon of Bizerte, Tunisia, using the Sentinel-2 MSI sensors with the ACOLITE and C2RCC atmospheric correction algorithms, are presented in Table 3. Unfortunately, turbidity data for the PRISMA sensor are not available.
For the Sentinel-2 MSI sensor and considering the ACOLITE algorithm, the turbidity equation TU = 27.03 × Rhow_560—0.254, gives an R2 of 0.88, with low associated errors (RMSE of 0.12 NTU and MAPE of 30%). These results are based on an ensemble of 9 points (match-ups) used for the calibration (n1) and another set of 9 points for the validation (n2). Similarly, for the Sentinel-2 MSI sensor and considering the C2RCC algorithm, the turbidity equation TU = 20.97 × Rhow_560—0.005, shows an R2 of 0.88. The performance is comparable to the ACOLITE algorithm, with an RMSE of 0.13 NTU and a MAPE of 30%, based on the same ensemble of 9 points for calibration and 9 points for validation. The statistical results (Table 3) indicate that both ACOLITE and C2RCC atmospheric correction algorithms demonstrate statistically similar performances in turbidity mapping for the Bizerte region. However, due to its better correction of the sunglint phenomenon, commonly observed in the study area, the ACOLITE algorithm is preferred. Thus, the Sentinel-2 MSI sensor with the ACOLITE algorithm is considered the preferred choice for turbidity mapping in this region, given its superior performance.
Regarding PRISMA, the limited availability of data with only one image from July 20th, 2021, prevents correlations or comparisons with field measurement. As a result, statistically reliable information for calibrating and validating turbidity using PRISMA in this region is lacking, due to the absence of in-situ measurements during PRISMA overpass over the study areas. Nevertheless, PRISMA data were used to extract spectral signature details of the very shallow water layers and perform classification using PRISMA hyperspectral measurements. The primary objective was to create a mask for the very shallow water layer, exploring the potential advantages of PRISMA in analyzing spectral details.
Several recent studies addressed the issue of overestimated water optical and biogeochemical properties from satellite data in shallow water environments, notably, by modelling the influence of bottom albedo for varying water depth and water column optical properties. For example, Wattelez et al. (2022) used an unsupervised clustering approach to improve the classification of seafloor colors in shallow environments using Sentinel-2 imagery, allowing the retrieval of spatio-temporal dynamics of chlorophyll-a concentration and water turbidity in sensitive coastal environments. Similarly, Garcia et al. (2020) proposed an operational approach to estimate the seafloor reflectance from multispectral imagery, also improving the retrieval of the water column optical properties in shallow water environments. These studies showed the importance of accurate atmospheric corrections of satellite data for improved estimation of bathymetry and benthic classification. It is also crucial to understand the combined effects of the atmosphere and the water column and to validate the results through sampling campaigns. Furthermore, our study presented results of a supervised classification using the SAM algorithm applied to the study site, based on spectral signatures extracted from PRISMA and Sentinel-2 MSI data. The classification results and the identification of very shallow water masses, without relying on expensive bathymetric measurements or complex models, simply rely on the use of the water-leaving reflectance at a specific wavelength (704 nm) and on a regionally-tuned threshold. The creation of the shallow water mask and the turbidity algorithms were calibrated by in-situ measurements performed during satellite overpasses, and qualitatively validated by in-situ observations and literature syntheses focusing on studies in the fields of hydrobiological functioning (Bejaoui et al. 2017), marine ecology (Sahraoui et al. 2009) and plastic pollution (Toumi et al. 2019).
However, the method developed in the present study has certain limitations, especially in the presence of highly turbid waters, which may hardly be distinguished from shallow water areas. The shallow water mask is particularly suited for clear waters and study areas where turbidity does not exceed 5 NTU. Additionally, although hyperspectral data have proven to be highly beneficial for accurately identifying the spectral signature of very shallow water regions, the use of a single PRISMA image, with only 11 wavebands between 515 and 556 nm, also represents a limit. Therefore, it is important to consider these results with care. It will be necessary to conduct further studies focused on the typology of spectral signatures in coastal and inland waters, based on in-situ reflectance measurements to correct for the effects of atmosphere, disturbances at the air–water interface, and seafloor reflection, to retrieve accurate spectral information from the water column.
6 Conclusion
The monitoring and assessment of water quality in Mediterranean inland waters face significant challenges due to their optical complexity enhanced by climate change effects, human activities and freshwater inputs. To address these challenges, remote sensing offers a valuable solution by providing detailed spatial information on water quality parameters. The empirical algorithms developed in the present study for Sentinel-2 MSI and PRISMA satellite data can be used, at regional scale, to map turbidity and create a shallow water mask in the Bizerte lagoon and bay.
The results show that the water-leaving reflectance signal in the green spectral region (rhow_560) derived from Sentinel-2 MSI satellite data provides a robust proxy for mapping turbidity in these optically complex environments, based on the high correlation found with in-situ measurements. Using an existing spectral analysis and a regionally tuned threshold, a simple but efficient method was successfully developed to distinguish satellite pixels representative of shallow waters (where the signal is contaminated by bottom effects) from deep and/or turbid waters. This approach uses satellite data corrected for atmospheric effects at the 704 nm waveband, with a threshold of 0.02, to create an accurate shallow water mask.
The methods developed in this study to identify shallow water areas, classify and map the optical properties of coastal lagoons are regional and empirical. However, they can be easily adapted to any similar coastal environment based on field optical measurements carried out during satellite overpasses. This approach provides practical solutions for applications such as navigation, fisheries and water quality monitoring, without the need for costly bathymetric measurements or complex models. The results obtained have been rigorously validated both qualitatively and quantitatively.
The presented shallow water mask has been developed for low turbid water conditions (typically water turbidity values lower than 5 NTU). Further research is, therefore, required to extend the characterization of spectral signatures in such shallow coastal environments, notably in the presence of turbid water masses and considering various types of bottom seafloors (e.g., sand, mud, grass, coral reefs). In-situ measurements of the water reflectance simultaneously with satellite overpasses is needed to further validate not only atmospheric corrections, but also adjacency and reflection corrections applied to remote sensing data. These improvements will increase the accuracy of water quality assessments in coastal and inland waters.
Data availability
The data presented in this study are available on request from the corresponding author.
References
Bejaoui B, Ferjani D, Zaaboub N, Chapelle A, Moussa M (2010) Caractérisation Hydrobiologique Saisonnière de la Lagune de Bizerte (Tunisie). Revue Des Sciences De L’eau / J Water Sci 23:215–232. https://doi.org/10.7202/044686a
Bejaoui B, Solidoro C, Harzallah A, Cheva-lier C, Chapelle A, Zaaboub N, Aleya L (2017) 3D modeling of phytoplankton seasonal variation and nutrient budget in a southern Mediterranean Lagoon. Mar Pollut Bull 116:428–438. https://doi.org/10.1016/j.marpolbul.2016.11.001
Bulgarelli B, Kiselev V, Zibordi G (2014) Simulation and analysis of adjacency effects in coastal waters: a case study. Appl Optics 53:1523–1545. https://doi.org/10.1364/AO.53.001523
Chakravarty S, Paikaray D, Mishra R, Dash S (2021) Hyperspectral Image Classification using Spectral Angle Mapper. In: 2021 IEEE International Women in Engineering (WIE) Conference on Electrical and Computer Engineering (WIECON-ECE), 87–90. https://doi.org/10.1109/WIECON-ECE54711.2021.9829585
Dogliotti AI, Ruddick KG, Nechad B, Doxaran D, Knaeps E (2015) A single algorithm to retrieve turbidity from remotely sensed data in all coastal and estuarine waters. Remote Sens Environ 156:157–168. https://doi.org/10.1016/j.rse.2014.09.020
Drusch M, Del Bello U, Carlier S, Colin O, Fernandez V, Gascon F, Hoersch B, Isola C, Laberinti P, Martimort P, Meygret A, Spoto F, Sy O, Marchese F, Bargellini P (2012) Sentinel-2: ESA’s optical high-resolution mission for GMES operational services. Remote Sens Environ 120:25–36. https://doi.org/10.1016/j.rse.2011.11.026
Eleveld MA, Ruescas AB, Hommersom A, Moore TS, Peters SWM, Brockmann C (2017) An optical classification tool for global lake waters. Remote Sens 9:420. https://doi.org/10.3390/rs9050420
Erena M, Domínguez JA, Aguado-Giménez F, Soria J, García-Galiano S (2019) Monitoring coastal lagoon water quality through remote sensing: The Mar Menor as a case study. Water 11:1468. https://doi.org/10.3390/w11071468
Freitas R, Sampaio L, Rodrigues AM, Quintino V (2005) Sea-bottom classification across a shallow-water bar channel and near-shore shelf, using single-beam acoustics. Estuar Coast Shelf Sci 65:625–632. https://doi.org/10.1016/j.ecss.2005.07.011
Garcia RA, Lee Z, Barnes BB, Hu C, Dierssen HM, Hochberg EJ (2020) Benthic classification and IOP retrievals in shallow water environments using MERIS imagery. Remote Sens Environ. 1;249:112015. https://doi.org/10.1016/j.rse.2020.112015
Giardino C, Bresciani M, Stroppiana D, Oggioni A, Morabito G (2013) Optical remote sensing of lakes: an overview on Lake Maggiore. J Limnol 73 (s1). https://doi.org/10.4081/jlimnol.2014.817.
Hlaili AS, Chikhaoui MA, El Grami B, Mabrouk HH (2006) Effects of N and P supply on phytoplankton in Bizerte Lagoon (western Mediterranean). J Exp Mar Biol Ecol 333:79–96. https://doi.org/10.1016/j.jembe.2005.12.049
IOCCG (2000) Remote Sensing of Ocean Colour in Coastal, and Other Optically-Complex, Waters, edited by S. Sathyendranath. Reports of the International Ocean-Colour Coordinating Group, No. 3, Dartmouth, NS, Canada, International Ocean-Colour Coordinating Group (IOCCG), 140pp. https://doi.org/10.25607/OBP-95
Kay S, Hedley JD, Lavender S (2009) Sun glint correction of high and low spatial resolution images of aquatic scenes: a review of methods for visible and near-infrared wavelengths. Remote Sens 1:697–730. https://doi.org/10.3390/rs1040697
Keukelaere L, Sterckx S, Adriaensen S, Knaeps E, Reusen I, Giardino C, Bresciani M, Hunter P, Neil C, Van der Zande D, Vaiciute D (2018) Atmospheric correction of Landsat-8/OLI and Sentinel-2/MSI data using iCOR algorithm: Validation for coastal and inland waters. Euro J Remote Sens 51(1):525–542. https://doi.org/10.1080/22797254.2018.1457937
Kruse FA, Lefkoff AB, Boardman JB, Heidebrecht KB, Shapiro AT, Barloon PJ, Goetz AFH (1993) The spectral image processing system (SIPS)—interactive visualization and analysis of imaging spectrometer data. Remote Sens Environ 44:145–163. https://doi.org/10.1016/0034-4257(93)90013-N
Kutser T (2012) The possibility of using Landsat image archive for monitoring long term trends in coloured dissolved organic matter in lake waters. Remote Sens Environ 123:334–338. https://doi.org/10.1016/j.rse.2012.04.004
Le C, Li Y, Zha Y, Sun D, Huang C, Zhang H (2011) Remote estimation of chlorophyll a in optically complex waters based on optical classification. Remote Sens Environ 115:725–737. https://doi.org/10.1016/j.rse.2010.10.014
Loizzo R, Guarini R, Longo F, Scopa T, Formaro R, Facchinetti C, Varacalli G (2018) PRISMA: The Italian Hyperspectral Mission. In IGARSS 2018 IEEE International Geoscience and Remote Sensing Symposium (pp. 175–178). https://doi.org/10.1109/IGARSS.2018.8518512
MAERH (2003) Etude sur la dépollution industrielle dans le bassin versant du lac de Bizerte. Etude réalisée par le groupement de bureaux d’études COMETE-Engineering et IHE pour le compte du MAERH, ministère de l’Agriculture, de l’Environnement et des Ressources Hydrauliques.
Markogianni V, Dimitriou E, Karaouzas I (2014) Water quality monitoring and assessment of an urban Mediterranean lake facilitated by remote sensing applications. Environ Monit Assess 186:5009–5026. https://doi.org/10.1007/s10661-014-3788-1
McKinna LI, Fearns PR, Weeks SJ, Werdell PJ, Reichstetter M, Franz BA, Feldman GC (2015) A semi-analytical ocean color inversion algorithm with explicit water column depth and substrate reflectance parameterization. J Geophys Res 120(3):1741–1770. https://doi.org/10.1002/2014JC010224
Mertes LA, Smith MO, Adams JB (1993) Estimating suspended sediment concentrations in surface waters of the Amazon River wetlands from Landsat images. Remote Sens Environ 43(3):281–301. https://doi.org/10.1016/0034-4257(93)90071-5
Nechad B, Ruddick KG, Park Y (2010) Calibration and validation of a generic multisensor algorithm for mapping of total suspended matter in turbid waters. Remote Sens Environ 114(4):854–866. https://doi.org/10.1016/j.rse.2009.11.022
Ngoc DD, Loisel H, Jamet C, Vantrepotte V, Duforêt-Gaurier L, Minh CD, Mangin A (2019) Coastal and inland water pixels extraction algorithm (WiPE) from spectral shape analysis and HSV transformation applied to Landsat 8 OLI and Sentinel-2 MSI. Remote Sens Environ 223:208–228. https://doi.org/10.1016/j.rse.2019.01.024
Palmer SC, Kutser T, Hunter PD (2015) Remote sensing of inland waters: challenges, progress and future directions. Remote Sens Environ 157:1–8. https://doi.org/10.1016/j.rse.2014.09.021
Renosh PR, Doxaran D, Keukelaere LD, Gossn JI (2020) Evaluation of atmospheric correction algorithms for sentinel-2-MSI and sentinel-3-OLCI in highly turbid estuarine waters. Remote Sensing 12(8):1285. https://doi.org/10.3390/rs12081285
Ruddick KG, Ovidio F, Rijkeboer M (2000) Atmospheric correction of SeaWiFS imagery for turbid coastal and inland waters. Appl Opt 39:897–912. https://doi.org/10.1364/AO.39.000897
Ruddick KG, Hunter PD, Domínguez Gómez JA, Martinez-Vicente V, Présing M, Horváth H, Kovács AW, Vörös L, Zsigmond E, Tyler AN (2019) Optimal cyanobacterial pigment retrieval from ocean colour sensors in a highly turbid, optically complex lake. Remote Sens 11:1613. https://doi.org/10.3390/rs11131613
Sahraoui I, Hlaili AS, Mabrouk HH, Leger C, Bates SS (2009) Blooms of the diatom genus Pseudo-nitzschia H. Peragallo in Bizerte lagoon (Tunisia, SW Mediterranean). Diatom Res 24:175–190. https://doi.org/10.1080/0269249X.2009.9705789
Shen Q, Li J, Zhang F, Sun X, Li J, Li W, Zhang B (2015) Classification of several optically complex waters in china using in-situ remote sensing reflectance. Remote Sens 7:14731–14756. https://doi.org/10.3390/rs71114731
Soppa MA, Silva B, Steinmetz F, Keith D, Scheffler D, Bohn N, Bracher A (2021) Assessment of polymer atmospheric correction algorithm for hyperspectral remote sensing imagery over coastal waters. Sensors 21:4125. https://doi.org/10.3390/s21124125
Soriano-González J, Urrego EP, Sòria-Perpinyà X, Angelats E, Alcaraz C, Delegido J, Moreno J (2022) Towards the combination of C2RCC processors for improving water quality retrieval in Inland and Coastal Areas. Remote Sensin 14:1124. https://doi.org/10.3390/rs14051124
Spyrakos E, O’Donnell R, Hunter PD, Miller C, Scott M, Simis S, Neil C, Barbosa C, Binding CE, Bradt S, Bresciani M, Dall’Olmo G, Giardino C, Gitelson AA, Kutser T, Li L, Matsushita B, Martinez-Vicente V, Matthews MW, Ogashawara I, Ruiz-Verdú A, Schalles JF, Tebbs E, Zhang Y, Tyler AN (2018) Optical types of inland and coastal waters. Limnol Oceanogr 63:846–870. https://doi.org/10.1002/lno.10674
Steinmetz F, Ramon D (2018) Sentinel-2 MSI and Sentinel-3 OLCI consistent ocean colour products using POLYMER. Proc. SPIE 10778, Remote Sensing of the Open and Coastal Ocean and Inland Waters, 107780E. https://doi.org/10.1117/12.2500232
Stumpf RP, Holderied K, Sinclair M (2003) Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol Oceanography. 48(1part2): 547–556. https://doi.org/10.4319/lo.2003.48.1_part_2.0547
Tavares MH, Lins RC, Harmel T, Fragoso CR, Martínez JM, Motta-Marques D (2021) Atmospheric and sunglint correction for retrieving chlorophyll-a in a productive tropical estuarine-lagoon system using Sentinel-2 MSI imagery. ISPRS J Photogramm Remote Sens 174:215–236. https://doi.org/10.1016/j.isprsjprs.2021.01.021
Toumi H, Abidli S, Bejaoui M (2019) Microplastics in freshwater environment: the first evaluation in sediments from seven water streams surrounding the lagoon of Bizerte (Northern Tunisia). Environ Sci Pollut Res 26:14673–14682. https://doi.org/10.1007/s11356-019-04695-0
Tyler AN, Hunter PD, Spyrakos E, Groom S, Constantinescu AM, Kitchen J (2016) Developments in Earth observation for the assessment and monitoring of inland, transitional, coastal and shelf-sea waters. Sci Total Environ 572:1307–1320. https://doi.org/10.1016/j.scitotenv.2016.01.020
Vahtmäe E, Kutser T (2007) Mapping bottom type and water depth in shallow coastal waters with satellite remote sensing. J Coastal Res, 2007, 185–89. http://www.jstor.org/stable/26481580.
Vanhellemont Q, Ruddick K (2016) Acolite for Sentinel-2: Aquatic applications of MSI imagery. In: Proceedings of the 2016 ESA living planet symposium, Prague, Czech Republic, 9–13 May 2016, pp. 9–13.
Vanhellemont Q, Ruddick K (2021) Atmospheric correction of Sentinel-3/OLCI data for mapping of suspended particulate matter and chlorophyll-a concentration in Belgian turbid coastal waters. Remote Sens. Environ. 256, 112284. https://doi.org/10.1016/j.rse.2021.112284
Wang M, Wu Z, Yang F, Ma Y, Wang XH, Zhao D (2018) Multifeature extraction and seafloor classification combining LiDAR and MBES data around Yuanzhi Island in the South China Sea. Sensors 18:3828. https://doi.org/10.3390/s18113828
Warren MA, Simis SG, Martinez-Vicente V, Poser K, Bresciani M, Alikas K, Ansper A (2019) Assessment of atmospheric correction algorithms for the sentinel-2a multispectral imager over Coastal and Inland Waters. Remote Sens Environ 225:267–289. https://doi.org/10.1016/j.rse.2019.02.019
Wattelez G, Dupouy C, Juillot F (2022) Unsupervised optical classification of the seabed color in shallow oligotrophic waters from sentinel-2 images: a case study in the Voh-Koné-Pouembout Lagoon (New Caledonia). Remote Sensing 14:836. https://doi.org/10.3390/rs14040836
Wettle M, Brando VE (2006) SAMBUCA semi-analytical model for Bathymetry, un-mixing and concentration assessment. Canberra, ACT: CSIRO Land & Water; 2006-07. procite:ba934f66-2eb4-4a69-8782-b19c0e9ecf72. https://doi.org/10.4225/08/5866a187b7a3c
Wilson KL, Wong MC, Devred E (2020) Branching algorithm to identify bottom habitat in the optically complex coastal waters of Atlantic Canada using sentinel-2 satellite imagery. Front Environ Sci 8:579856. https://doi.org/10.3389/fenvs.2020.579856
Windle AE, Evers-King H, Loveday BR, Ondrusek M, Silsbe GM (2022) Evaluating atmospheric correction algorithms applied to OLCI sentinel-3 data of chesapeake bay waters. Remote Sens 14:1881. https://doi.org/10.3390/rs14081881
Zhang Y, Li Z, Bai K, Wei Y, Xie Y (2021) Satellite remote sensing of atmospheric particulate matter mass concentration: advances, challenges, and perspectives. Fundamental Res 1(3):240–258. https://doi.org/10.1016/j.fmre.2021.04.007
Acknowledgements
Special thanks to GREENLAB for their professionalism. Fisherman Am Slah and his boat Baya from Bizerte 5908 are extended our thanks for their availability during the sampling missions. Additionally, the high-quality and readily available data used in this study are acknowledged to be provided by the Sentinel-2 Scientific Data Hub and Agenzia Spaziale Italiana.
Funding
The authors did not receive support from any organization for the submitted work.
Author information
Authors and Affiliations
Contributions
RK and DD conceptualized the manuscript, discussed the methodology, and wrote the original draft. RK and BK investigated and made the data analysis. RK and CT participated in the field campaigns. All authors participated in the improvement of the manuscript. All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Katlane, R., Doxaran, D., ElKilani, B. et al. Remote Sensing of Turbidity in Optically Shallow Waters Using Sentinel-2 MSI and PRISMA Satellite Data. PFG 92, 431–447 (2024). https://doi.org/10.1007/s41064-023-00257-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s41064-023-00257-9