
Abstract
Seismic protection on bridges is one of the most important issue of infrastructure engineering. Recently geotechnical seismic isolation (GSI) has emerged as a solution to protect structures to the destroying effects of earthquakes. It consists of placing a horizontal layer of geosynthetics underneath the building to absorb seismic energy, and thus, to transmit significantly smaller accelerations to the overlying structure. This study aims at considering 3D numerical simulations of a soil–structure system applied to several bridge configurations. In particular, the soil has been performed with nonlinear hysteretic materials and advanced plasticity models. The proposed approach enables to drive the assessment of GSI technique with evaluation of soil non-linear response into a unique twist. Therefore, the paper aims at assessing the cases where GSI becomes detrimental. At the same time, models of structures allow to assess the structural performance, by considering accelerations and displacements at various heights. In this regard, the study can be considered one of the few attempts to evaluate the relatively novel technique of GSI on bridge configurations. It allows to propose new design considerations for engineers and consultants.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Background
Geotechnical seismic isolation (GSI) is one of the most recent solutions to protect structures from the destroying effects of earthquakes. Originally this principle has been derived by base isolation (in particular sliding devices applications as [1]) and shown in [2]. This technique allows to decouple the structure from the ground by intentionally concentrating seismic energy dissipation in a unique layer between the foundation and the structure. In this case, the dissipative layer consists of geosynthetics generally used for separation, reinforcement, filtration, drainage, and containment applications. In the last decades, GSI has been investigated by many researchers such as Yegian and Lahlaf [2], Kavazanjian et al. [3], Yegian and Catan [4], Yegian and Kadakal [5], Georgarakos et al. [6] and Tsang [7], who introduced the GSI concept. Series of shake table experiments have been performed by Yegian and Lahlaf [2], Yegian and Catan [4], Yegian and Kadakal [5] and more recently at Bogazici University, Endincliler and Sekman [8]. These tests showed the potentiality of GSI as an efficient solution for mitigating the earthquake hazards. In this background, numerical studies have been performed by Tsang [7], Tsang et al. [9], by applying the commonly equivalent linear method to model the dynamic soil properties. In these models, non-linear characteristics of soils can be captured only by two strain-compatible material parameters (such as shear modulus and damping ratio). In this regard, the presented study aims at overcoming these simplifications, by performing the soil with non-linear hysteretic materials and advanced plasticity models. As shown in [4, 5], there are two alternate schemes of the GSI depending on the placement of the liner. Foundation isolation (FI) consists of placing the liner immediately underneath the foundation. Soil isolation (SI) consists of placing the liner at some depth below the foundation. In this paper, 3D numerical simulations of a soil–structure system have been applied to several bridge configurations. FI and SI solutions has been assessed by placing the liner at different depths.
Case study
This paper aims at reproducing the seismic response of bridge configurations on different deformable soil conditions and isolated by a GSI system. The soil has been performed with nonlinear hysteretic materials and advanced plasticity models. This approach enables to reproduce soil hysteretic elasto-plastic shear response (including permanent deformations) and damping foundation impedances, by applying the open-source computational interface OpenSeesPL, implemented within the FE code OpenSees [10]. In particular, this platform is able to capture the effects of amplification and consequent accumulation of deformation in the ground. At the same time, the model of the structure allows to assess the structural performance, by considering accelerations and displacements.
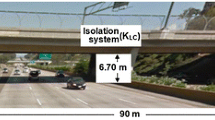
The proposed approach enables to drive the assessment of GSI technique with evaluation of soil non-linear response into a unique twist. In particular, Opensees consists of a framework for saturated soil response as a two-phase material following the u–p (where u is displacement of the soil skeleton and p is pore pressure) formulation. This interface, implemented within the FE code OpenSees [10], had been originally calibrated for pile analysis. Here it has been modified to consider the presence of the system structure—foundation (Fig. 1). The bridge was modelled as a linear column with the equivalent characteristics of a 1DOF system (Fig. 2). In particular, the mass at the top of the structure represents the deck of the bridge while the stiffness of the 1DOF has been calculated to take into account the presence of the abutments. The study considers the longitudinal direction only.

3D system mesh

GSIs applied in the study
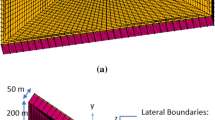
Based on previous studies, such as [11, 12, 15, 16], the soil has been considered a one-layer homogenous cohesive material with a 30 m depth. The adopted 3D (100 m × 75 m × 30 m) FE mesh is composed of 2496 brickUP linear isoparametric 8-nodes elements with 2873 nodes (Fig. 1). The model base boundaries are set at a depth of 30 m from ground surface. OpenSees is able to simulate real wave propagation adopting periodic boundaries by assuming that at any special location, symmetry conditions can be adopted [17]. Displacement degrees of freedom of the left and right boundary nodes were tied together both longitudinally and vertically using the penalty method. In this regard, base and lateral boundaries were modelled to be impervious, as to represent a small section of a presumably infinite (or at least very large) soil domain by allowing the seismic energy to be removed from the site itself. The boundaries are located as far as possible from the structure as to decrease any effect on the response. For more details, see [11, 15]. Connections between the structure and the soil are built up with specific elements called “equaldof” which are able to impose the displacements to be the same between the structure and the soil nodes. The mechanical behavior of the soil was modelled with the implemented material named Pressure Independent Multiyield. It consists of a nonlinear hysteretic material, using a Von Mises multi-surface kinematic plasticity approach together with an associate flow rule [19]. It allows control of the magnitude of cycle-by-cycle permanent shear strain accumulation [20]. Non-linear shear stress–strain back-bone curve is represented by a hyperbolic relation, which is defined by low-strain shear modulus and ultimate shear strength constants. For more details, see [20] and [21]. In the study, the mechanical behavior of the soil has been modelled as a nonlinear hysteretic material, using a Von Mises multi-surface kinematic plasticity approach together with an associate flow rule. This constitutive formulation is able to capture both monotonic and hysteretic elasto-plastic cyclic response of those soils whose shear behavior is assumed insensitive to confining stress. According to this formulation, plasticity is exhibited only in the deviatoric stress–strain response, while volumetric response is linear-elastic.
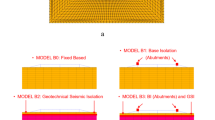
In particular, the study consists of reproducing one degree of freedom (DOF) structural systems with increasing fundamental periods on different soil conditions (Table 1). The original configuration (without GSI) has been compared with several isolated configurations with different positions of the liner (0.50, 10, 20 and 30 m depth and named GSI1, GSI2, GSI3 and GSI4, respectively), as shown in Fig. 2. The properties of GSI liner have been calibrated by taking into account the values taken from [9] and detailed in Table 1.
The study can be divided into two steps. First, the effect of GSI on period elongation has been assessed. This is the principal effect on which isolation technique is based on [18]. Therefore, the assessment of the mutual effect of soil deformability and the introduction of GSI at various depths is fundamental to study GSI technique. The second step consists of performing dynamic analyses, to assess the effects of GSI with earthquake conditions. For all analyses, the Newmark transient integrator is used with γ = 0.6 and β = 0.3. Stiffness and mass proportional damping is added with a 2% equivalent viscous damping at 1 and 6 Hz.
Eigenvalue analysis
In this section, the effect of adopting different GSIs with several soil deformability has been studied. In particular, a hard soil (shear velocity equal to 1600 m/s, soil A) has been used to reproduce rigid base conditions and neglecting soil–structure interaction (SSI) effects. To verify this assumption, the acceleration inputs at the base of the mesh were compared to the accelerations at the top of the layers, which propagates at the base of the structure and they were found to be identical, as shown in [15]. Then, soil stiffness was varied to take into account SSI effects. In particular, soils were chosen to be representative of the typologies defined by the Eurocode (EC8, 3.1.2). Table 1 details the soil properties adopted in the study. Several bridge configurations has been considered (0.429–0.526–0.674 s) and named, respectively, B1, B2 and B3. Table 2 shows that the effect of soil deformability is the elongation of fundamental frequencies of the structure (almost 115 and 140% for soil B and soil C, respectively). Soil D shows bigger differences (from 170 to 193% depending on which structure is studied). The period elongation happens because of the soil deformability increases, as shown in [13–16]. In particular, for this study, this elongation is due to two reasons. One is because GSI application introduces a sliding effect, and thus, the soil deformability increases. Second, period elongation depends on the change of the soil itself: the deformability increases (from soil A to soil D). In this regard, this step 1 is fundamental to assess which GSI case performs better.
Table 3 shows how the fundamental periods vary when GSIs are applied at different depths. The percentages in the brackets are calculated by dividing the calculated period with the one correspondent with the non-isolated system from Table 2. The bold values are those where the isolation becomes detrimental. FI (GSI1) seems to elongate the periods only in case of soil A. For deformable soils, GSI1 is shown to become detrimental.
For SI cases (GSI2–GSI4), it is shown that the structural dynamic characteristics do not influence the performance of the system, and thus, the structure and the soil are completely decoupled. GSI performs its role and works at the same way whatever structure is considered. GSI1 is seen to be the solution that allows the maximum elongation of the period (maximum value: 281% for soil A). SI (GSI2, GSI3 and GSI4) improves with the depth of the liner. In particular, for the most deformable case (B3), GSI2 becomes detrimental for deformable soils (soil B, C and D). In general, SI fits optimally when the soil behaves as a rigid block that moves on an isolated liner. Therefore, the best solutions are shown to be achieved with soil A. In this regard, it is important that the application of GSI technique is accompanied with procedures of soil improvement. Figure 3 shows the 3D meshes for all the considered cases.

Eigen value analysis GSI1 (FI)—GSI2-4(SIs)
Dynamic analyses
Based on the results from step 1, B3 configuration has shown to be the one with minor improvements. In addition, GSI4 is the optimal solution among the presented ones (see Table 3). Therefore, the dynamic analyses have been performed for B3 and GSI4 and been carried out to assess the effects of soil deformability on the structural performance. Five input motions (Fig. 4; Table 4) were selected to affect the structure significantly and applied along the longitudinal axis. The three dimensional behavior of the system is herein considered. Figure 5 shows inputs 1 and 3 at the base and the acceleration time histories at 30 m depth (at the top surface of the GSI4). The horizontal lines show the maximum (and minimum) values for each soil conditions to assess the isolation reduction on the top accelerations. Table 5 shows the isolation reductions (calculated as the ratio between the peak acceleration at the surface and the PGA) for each soil conditions and all the considered input motions. It is possible to assess that the best reduction is achieved for soil A (maximum reduction: 7.78, minimum reduction: 3.82). For soil B and C these values become: 5.52 and 3.22, 3.34 and 2.56 for soil B and C, respectively. In case of soil D (high deformable soil), GSI4 becomes not interesting, since the liner characteristics and soil parameters are similar to each other—the isolation effect is low. The values are: 1.54 and 1.10. Table 6 shows the maximum displacements at the surface. It is possible to see that the displacements are not significantly affected by soil deformability. For input n.3 and n.5 the values are significant (around 90 and 80 cm, respectively). These values should be taken into account in the isolation design to adequate the connections between the system and the surrounding soil.

Input motions (longitudinal and transversal directions) applied in the study

n. 1 and n. 3 input motion acceleration (longitudinal direction) and the upper face of GSI1 for soil A, B, C and D
Conclusions
The paper shows a numerical study aimed at investigating GSI technique as a solution to protect bridge configurations from the destroying effects of earthquakes. The presented study aims at overcoming the linear equivalent simplifications by performing the soil with nonlinear hysteretic materials and advanced plasticity models. 3D numerical simulations of a soil–structure system have been applied to several bridges and different positions of the liner. In particular, the paper applies the open-source computational interface OpenSeesPL, implemented within the FE code OpenSees performing parametric studies based on mutual behavior of soil and structure dynamic characteristics. The results show how the effect of GSI depends on soil deformability. This is important to underline that linear descriptions of the soil are too simplified and not sufficiently detailed. In particular, this study is a first attempt to calibrate a high non-linear model for more detailed studies aimed at assessing GSI technique. This will be the objective of future work.
References
Forcellini D, Morandini C, Betti M, Facchini L (2017) A seismic assessment and protection proposal of a base isolation system for Michelangelo’s David. In: 16th World Conference on Earthquake Engineering, Santiago, Chile, 9–13 Jan 2017
Yegian MK, Lahlaf AM (1992) Dynamic inter-face shear strength properties of geomembranes and geotextiles. J Geotech Eng 118:760–779
Kavazanjian EJ, Hushmand B, Martin GR (1991) Frictional base isolation using a layered soil-synthetic liner system. In: Proceedings of the Third U.S. Conference on Lifeline Earthquake Engineering (pp. 1139–1151). Los Angeles, California: ASCE Technical Council on Lifeline Earthquake Engineering Monograph No. 4, 1991
Yegian MK, Catan M (2004) Soil isolation for seismic protection using a smooth synthetic liner. J Geotech Geoenviron Eng 130:1131–1139
Yegian MK, Kadakal U (2004) Foundation isolation for seismic protection using a smooth synthetic liner. J Geotech Geoenviron Eng 130:1121–1130
Georgarakos P, Yegian MK, Gazetas G (2005) In-ground isolation using geosynthetic liners. In: 9th World Seminar on Seismic Isolation, Energy Dissipation and Active Vibration Control of Structures. Kobe
Tsang HH (2009) Geotechnical seismic isolation. Earthquake engineering: new research. Nova Science Publishers, Inc., New York, pp 55–87
Edinçliler A, Sekman M (2016) Investigation on improvement of seismic performance of the mid-rise buildings with geosynthetics, Insights and Innovations in Structural Engineering, Mechanics and Computation—Zingoni (Ed.), Taylor & Francis Group, London, ISBN 978-1-138-02927-9
Tsang HH, Lo SH, Xu X, Neaz Sheikh M (2012) Seismic isolation for low-to-medium-rise buildings using granulated rubber–soil mixtures: numerical study. Earthq Eng Struct Dyn 41(14):2009–2024
Mazzoni S, McKenna F, Scott MH, Fenves GL (2009) Open System for Earthquake Engineering Simulation. Pacific Earthquake Engineering Research Center, University of California, Berkeley, User Command-Language Manual
Elgamal A, Lu J, Forcellini D (2009) Mitigation of liquefaction-induced lateral deformation in a sloping stratum: three-dimensional numerical simulation. J Geotech Geoenviron Eng 135:1672–1682
Forcellini D, Gobbi S (2015) Soil Structure interaction assessment with advanced numerical simulations. In: Proceedings of Computational Methods in Structural Dynamics and Earthquake Engineering conference (COMPDYN), Crete Island, Greece, 25–27 May 2015
Wolf JP (1985) Seismic soil–structure interaction. Prentice Hall, Englewood Cliffs
Kramer S (1996) Geotechnical earthquake engineering. Prentice-Hall International Series in Civil Engineering and Engineering Mechanics, William J. Hall Editor
Forcellini D (2017) Cost Assessment of isolation technique applied to a benchmark bridge with soil structure interaction. Bull Earthq Eng. doi:10.1007/s10518-016-9953-0
Forcellini D, Gobbi S, Mina D (2016) Numerical simulations of ordinary buildings with soil structure interaction. In: Zingoni (ed) Insights and innovations in structural engineering, mechanics and computation. Taylor & Francis Group, London. ISBN 978-1-138-02927-9
Law HK, Lam IP (2001) Application of periodic boundary for large pile group. J Geotech Geoenviron Eng 127–10:889–892
Kelly JM (1986) Aseismic base isolation: Review and bibliography. Soil Dyn Earthq Eng 5(4):202–216
Prevost JH (1985) A simple plasticity theory for frictional cohesionless soils. J Soil Dyn Earthq Eng 4(1):9–17
Yang Z, Elgamal A, Parra E (2003) A computational model for cyclic mobility and associated shear deformation. J Geotech Geoenviron Eng (ASCE) 129(12):1119–1127
Elgamal A, Yang Z, Parra E, Ragheb A (2003) Modeling of cyclic mobility in saturated cohesionless soils. Int J Plast 9(6):883–905
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Forcellini, D. Assessment on geotechnical seismic isolation (GSI) on bridge configurations. Innov. Infrastruct. Solut. 2, 9 (2017). https://doi.org/10.1007/s41062-017-0057-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s41062-017-0057-8