
Abstract
It is thought that structural control systems developed for structures exposed to earthquake warnings may have an important place in the future as well as today. Among these, base isolation systems offer effective and practical solutions by damping earthquake-induced vibrations at the ısolatıon level. However, due to the lack of self-adaptation feature against some near- or far-field earthquakes, semi-active and active control systems have been proposed by some researchers. These systems, which use an external power source, also need a control algorithm in order to take action in the event of an earthquake. In other words, in order for the control system to adapt to any earthquake and act as a vibration damper, a passive device, energy to activate the device and a control algorithm are needed. This review covers important studies on passive, semi-active, hybrid and active control systems recommended for the protection of structures against vibrations caused by earthquakes. The advantages and disadvantages of the studies on these control systems compared to each other have been determined. As a result of the study, some inferences were made about what kind of control system would be recommended in the future, taking into account the deficiencies in the literature.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The design and performance evaluation of earthquake resistant structures are made according to the rules of some Standards developed in the world. The maximum earthquake forces that can occur in the structure are calculated approximately in the mode coupling, equivalent earthquake and time history domain. These methods are based on the principle of meeting the earthquake effects by making permanent deformation of the structures (FEMA 273; ASCE 31). However, if an earthquake with different dynamic characteristics occurs, unexpected translations and accelerations may occur in the structure. Structural control strategies have been developed to avoid these unpredictable uncertainties and at the same time to ensure that structures are at the level of immediate use during an earthquake (Casciati et al. 2012). Structural control systems, which started to be studied in the last century, are examined in 4 groups: passive (base isolation system), semi-active, hybrid and active control systems (Datta 2010). With rubber-based isolators placed between the structure and the foundation in passive base isolation systems, the structure is made more flexible and the dominant period is extended (Fig. 1). In this case, earthquake accelerations and forces that will affect the structure are greatly reduced at the isolator level (Jangid and Kelly 2001; Ordonez et al. 2003; Kikuchi et al. 2008; Alhan and Şahin 2011; Kitayama and Constantinou 2019). The most commonly used rubber-based isolators are divided into three groups: low damping rubber-based isolators, high damping rubber-based isolators and lead-core rubber-based isolators (Pan et al. 2005) (Fig. 2).

Structure with base isolation system

Rubber-based sole isolation systems; a low damping isolator, b high damping isolator, c lead core isolator
In spherical surface passive isolation systems (Fig. 3), the friction force formed between the articulated slide and the spherical surface provides damping against earthquake forces (Jangid and Kelly 2001; Warn and Ryan 2012). The exposed energy is met by the friction forces occurring on the sliding interfaces in this type of isolators. When these isolation elements are exposed to an earthquake, they absorb the earthquake energy without transmitting it to the structure by making large permanent deformations in the horizontal direction (Jangid and Kelly 2001). For this reason, the superstructure moves stiffness apart from the foundation and structural/non-structural damages are prevented. It is not suitable for high structures and bridges with the dominant period of base isolation systems greater than 1 s. In addition, researchers have begun to search for a new control system because it cannot adapt to far-field earthquakes when designed for near-field earthquakes, and cannot adapt to near-field earthquakes when designed for far-field earthquakes (Ordonez et al. 2003; Kikuchi et al. 2008; Vassiliou et al. 2013; Kitayama and Constantinou 2019).

Friction based isolators
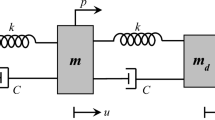
Active control systems, microprocessors, sensors and actuators (load transmitters) are used (Fig. 4). Active control systems consist of sensors that instantly measure this load in case of an external load acting on the structure and are transferred to the computer environment, and actuators that provide the transmission of control forces that instantly react against these forces. Active control systems, consisting of sensors that detect external loads affecting the structure and actuators that produce control forces against these loads, have the ability to adapt themselves to near and far field earthquakes (Ruzicka 1968; Johnson et al. 1998; Casciati and Chen 2012). In these systems, a large external power source and control algorithm are needed to produce control forces against earthquake forces. Disadvantages such as power outages during an earthquake and misuse of the control algorithm that will activate the system can disrupt the stability of the structure (Wang and Kim 1991; Symans and Constantinou 1999a, b; Tang and Zuo 2011; Casciati et al. 2012). In this case, semi-active or hybrid control systems have been proposed to eliminate the unstable situation that may occur in case of a power outage (Gaul and Nitsche 2001). Semi-active control systems, which require less energy, are control systems that can change the mechanical properties of passive isolators such as damping and stiffness with the help of a valve. These control devices do not cause stability problems because they do not transfer mechanical energy to the structure. Many semi-active control devices such as stiffness controllers, electrorheological (ER) fluid dampers, magnetorheological (MR) dampers, friction controllers and fluid viscous dampers have been used to protect structures against seismic loads. In this study, MR dampers are introduced (Gaul and Nitsche 2001; Jung et al. 2004). MRI devices can create controllable damping forces using MR fluids. When a magnetic field is applied to the liquid, the particles dispersed in the fluid align, particle chains are formed, and the fluid changes from a free-flowing, linear viscous liquid to a semi-solid, exhibiting viscoplastic behavior within a few milliseconds (Fig. 5).

Active control system tools; 1 hydraulic cylinder, 2 control unit, 3 control panel, 4 hydraulic control unit (Rebecchi et al. 2022)

MR damping semi-active device (Jung et al. 2004)
The hybrid control system has passive and active systems that will be used separately to protect the structure against seismic loads. Hybrid control systems generally consist of controlling high-damping rubber bearings or low-friction sliding bearings with an active control device (Ogata 2009; Vrabie et al. 2012). In case of any power outage, the control system works as a passive system and earthquake effects can be covered (Housner et al. 1997; Adeli and Kim 2022). Hybrid base isolation system is a system in which passive isolation systems are controlled by active control devices. It is an isolation technique in which dynamic effects such as earthquake and wind continue to be covered by passive isolation systems in case of any power outage. The control block diagram developed for hybrid control systems is presented in Fig. 6.

Application diagram of the hybrid control system (Housner et al. 1997)
The current study covers the proposed control systems for earthquake resistant structures in Civil Engineering. In this work, existing studies in the literature related to these control systems were examined and discussed. At the end of the study, ideas about what an innovative system should be that can be recommended against earthquakes that may occur in buildings are stated and the expected studies to be carried out in the future are explained.
2 Structural Control Applications
In this section, current studies in the literature on passive, active, semi-active and hybrid base isolation systems are given. As a result of the inferences obtained, the gaps in the literature are supported by scientific basis.
2.1 Studies on Passive Control Systems
In the existing literature, many studies have been carried out using passive control systems such as base isolation systems and damping devices to protect buildings from earthquake effects (Castaldo and De Iuliis 2014; Rawlinson et al. 2015). Lu et al. (2011) proposed a sliding isolator system with a spherical surface and a variable curve similar to a friction pendulum. They defined a 6th degree polynomial function for the surface friction forces produced against earthquakes in this isolator that exhibits hysteretic behavior. To test the accuracy of the function, full-scale isolated steel frame peak ground accelerations (PGA) were carried out through shaking table experiments under the influence of 0.560 g far-field induced and 0.436 g near-field induced earthquakes, respectively. The results showed that the shaking table experiments confirmed the proposed polynomial function. The tests have shown that the isolators have a horizontal displacement of approximately 70 mm in a long-term earthquake caused by a far-field earthquake and 32 mm in a near-field earthquake. In this case, it was concluded that the designed isolators could be more effective in near-field earthquakes (Lu et al. 2011). Marshall and Charney (2012) proposed a hybrid passive control system consisting of high-damping rubbers and buckling-prevented steel crosses. They have also included viscous liquid dampers in this system. The system is adapted to the column ends and along the beam of the 9-storey structure consisting of moment-resisting steel frames. In the study, incremental dynamic analyzes were applied to a 9-storey building under the influence of 6 major earthquakes. The study showed that the non-isolator structure has a 2% damping ratio in the 1st mode period of 2.48 s. It was determined that the hybrid passive isolator structure without viscous liquid damper provided 8.9% damping in 2.19 s and the viscous liquid damper system provided 10% damping in 3.23 s (Marshall and Charney 2012). Nestovito and Occhiuzzi (2016) proposed a smart passive base isolation system in concave spherical form with magnetorheological and low friction coefficient for both earthquake early warning system and structural safety in viaducts. Nonlinear analyzes in the time domain were applied for the proposed system and viaduct with rubber-based base isolation system (Nestovito and Occhiuzzi 2016). The study results showed that, in addition to the earthquake early warning system, the proposed system is more advanced in terms of ease of application and robustness. Jia et al. (2016) proposed the marble-graphite sliding isolator in masonry wall structures. Mortar rods embedded in sliding isolators were used to control the loads acting on the masonry wall. The proposed sliding isolation system reduced the natural dominant period of the structure. In order to discuss the effectiveness of sliding isolators in the study, masonry wall structures were tested with actuators connected to the reaction wall horizontally and vertically (Jia et al. 2016).
Wang and Lu (2018) validated the 3D formulation they developed for variable sliding isolators with experimental data. Sliding isolators with variable curvature allow the structural rigidity to be constantly changed by adapting to any earthquake affecting the structure. Constantly changing the stiffness can prevent the risk of resonance over long periods. In this study, a 3D theoretical formulation was developed by considering three components of earthquake ground motion. The force balance created against the earthquake in the variable surface sliding isolator whose dynamic model is given in Fig. 7a, b is given in Eq. 1. The triaxial isolator forces specified in Eqs. 2, 3 and 4 represent the nonlinear dynamic responses of the 3-dimensional isolator. Here, ufx and ufy indicate the friction force components produced by the sliding surface in the x and y horizontal directions, respectively. In addition, urx and ury represent the stabilizing components due to the concave slip surface in the x and y horizontal directions, respectively. F can be expressed in terms of three Cartesian coordinate components as Fx, Fy and Fz. In the equations, zb, zb'(rb), xb and yb give the vertical displacement, slope, x-directional horizontal displacement and y-directional horizontal displacement of the isolator, respectively. N defines the normal force, which takes into account all three directions as Cartesian coordinates. Finally, M gives the total mass of the superstructure and the foundation. The dynamic model created using Lagrange polynomials has been verified by shaking table experiments. The effectiveness of sliding isolators in a single-storey steel structure was examined with shaking table experiments under the influence of 11 different ground motions. Experimental and numerical analysis results showed that the lowest limit value of acceleration, displacement, balancing force, shear and axial forces overlapped by 90% in both directions. It has also been shown that the surface slope and displacement capacities of the isolators increase the damping against earthquakes. The study has a unique value as it investigates the effectiveness of isolators with three-way warnings (Wang and Lu 2018).

SIVC system; a dynamic model, b free body diagram of forces (Wang and Lu 2018)
Roy and Matsagar (2019) investigated the effectiveness of passive control systems, in which steel crosses, liquid viscous dampers and visco-elastic dampers are used separately, to ensure that multi-storey steel structures under the influence of dynamic earthquake and wind loads remain at immediate use level, with a series of numerical analyses. Dynamic analyzes were carried out on steel structures with 9, 20 and 25 floors, with earthquake data scaled in accordance with the ground structure and wind loads adjusted according to the region. It has been determined that the earthquake performances of stiffness-welded steel braced and viscous elastic damping structures are insufficient, but their wind performance is sufficient. Although liquid viscous dampers reduce the highest peak acceleration and period values of the structure under earthquake and wind effects more than other dampers, they are found to be insufficient (Roy and Matsagar 2019). Zhou et al. (2022) applied nonlinear analyzes in the time domain under the influence of earthquakes with the highest ground accelerations of 0.035 g, 0.1 g and 0.2 g, respectively, in a 20-storey reinforced concrete structure with a semi-rigid 3D friction-based pendulum base isolation system. The structure was remodeled by taking into account the two-dimensional model of the same isolator. The results showed that the 3D isolation system was more effective than the 2D isolation model in reducing the earthquake-induced base shear force, overturning moment and acceleration response. However, it was also concluded that the 3D isolation model may cause larger floor displacement (Zhou et al. 2022).
Important studies available in the literature on passive base isolation systems applied in buildings at risk of earthquake are discussed. It has been observed that viscous damper-based isolators, which generally have constant stiffness, are not effective in some structures. In addition, studies have generally shown the effectiveness of passive base isolation systems under 1 s period values. It has also been determined that some passive floor isolation systems are effective in near-field earthquakes, but not in far-field earthquakes. It has been understood that sliding isolator systems with variable surface geometric forms, whose rigidity can be changed, can be effective in order for the passive base isolation system to be effective against any earthquake that is likely to affect the structure. In addition, the fact that these isolators are constructed as semi-rigid is also an important parameter. It is also considered important that such sliding isolators detect and respond to all three components of the earthquake: two horizontal and one vertical. It will be possible for sliding isolators to absorb earthquakes for long periods of time as a result of the friction forces generated by their sliding surfaces against earthquakes and their high displacement properties both horizontally and vertically. However, it is thought that these situations can only be effective against earthquakes of near or far field origin. Due to this situation, it is important that the isolators, which have a high displacement capacity, can produce friction force from their sliding surfaces, and should also be designed to dynamically respond to all three components of the earthquake, also work against both far-field and near-field earthquakes. However, it should not be forgotten that it will be important for the insulator to have a certain rigidity in order to maintain its stability in the event of a vertical earthquake. In building systems using rubber-based insulator systems, certain earthquake energy damping characteristics have emerged at high period values. However, these damping values were achieved by including anti-buckling steel crosses and viscous dampers added to the rubber system. Different passive base isolation system techniques are needed in order for such systems to create high damping in the elastic region without reaching long period intervals and to develop more economical and safe structures. For example, it is envisaged to use such rubber systems together with smart materials that have high Young's modulus, are flexible and can also detect dynamic vibrations.
2.2 Studies Conducted on Active Control Systems
Active control systems are systems that can be adapted to any earthquake using an external power source and managed by a control algorithm. Active control systems were used to generate control forces against earthquake forces in multi-degree of freedom building systems. In particular, piezoelectric actuators with finite element software have been preferred to produce these control forces (Ding et al. 2015; Schoeftner et al. 2019). Many studies on active control systems have been carried out in the literature within the scope of Civil Engineering. Casciati and Chen (2012) conducted shaking table experiments of a small-scale three-storey steel structure with wireless connections integrated into the structural control system consisting of an active mass damper, actuator and accelerometers operated by a PID (Proportional Integral Derivative) direct current controller, with an amplitude of 2 mm and a dominant frequency of 1.25 Hz. They tested it with sinusoidal vibrations of. In the study, accelerometers were placed on all floors. The study results showed that the PID controller is effective and efficient in operating the active mass damper. When the acceleration time curves on all floors were examined, it was determined that the active control system reduced floor accelerations by approximately 75% (Casciati and Chen 2012). Thenozhi and Yu (2014) developed a theory for the control system consisting of an active mass damper operated with PD/PID controllers. The developed theory has been confirmed by numerical and experimental studies for a 2-storey building. The experimental study for the control system consisted of accelerometers placed on the ground and the other two floors, data acquisition unit, active mass damper and shaking table. Numerical and experimental studies have shown that with the use of controllers, displacements at floor levels are reduced by approximately 90% (Thenozhi and Yu 2014). Ikeda (2016) proposed a new design based on ARX models, a system diagnostic method for the control of a structure against the effects of earthquakes or forced vibration with active mass dampers. In numerical applications of a 10-degree-of-freedom building structure, linear quadratic regulator control was used to understand the basic features of the proposed design procedure. The proposed new design method begins with the determination of the uncontrolled structure under the influence of earthquakes and forced vibrations with ARX models. Later, an active mass damper controller based on an ARX model was designed for construction. With the ARX model, the uncertain mass, stiffness and damping matrices for the structure were determined and the active mass damper was run for the structure with a linear quadratic regulator (LQR). Acceleration and velocity values resulting from the control forces produced in the structure against earthquakes have shown the accuracy of the proposed new design (Ikeda 2016). Miyamoto et al. (2016) developed an innovative active control system to reduce vibrations in structures under the influence of seismic shocks. The active control system is based on the equivalent-input-distorter (EID) approach, which can predict the effect of seismic shock and generate an equivalent control signal in the control input channel to reduce its effect. The actuator to be operated by EID was placed on the 1st and 5th floors of the 50-storey building with 10 degrees of freedom. Nonlinear analyzes were carried out in the time domain of the structure. Numerical analysis results showed that the EID estimator controls the structure better than LQR and SMC (sliding mode control) controllers. It has been determined that an acceleration of approximately 3 g occurs on the first floor of the building with an SMC controller, 0.61 g at the same floor level of the uncontrolled structure, 0.52 g in the LQR-controlled structure and 0.3 g in the EID-controlled structure. The lowest accelerations of 0.55 g were observed in the SMC-controlled structure on the 10th floor of the building (Miyamoto et al. 2016). Wang et al. (2017) designed a 6-axis orthogonal vibration isolation platform. The base of the isolation system consists of the acceleration sensor and actuator. The payload, which has a cylindrical shell structure and is considered rigid, is placed on the support legs. The base is designed as a combination of I-steel to improve the rigidity of the structure. The dynamic model of the system was established using the Newton–Euler Method. The control strategy for this system is the LQR control method. Simulation and experimental results have shown that the proposed six-axis orthogonal active vibration isolation platform with piezoelectric actuator can effectively reduce the dynamic response of the payload by an average of 5 dB in the frequency range of 20 Hz-200 Hz. It was found to reduce vibration accelerations approximately 5 times more than the traditional passive base isolation system (Wang et al. 2017). Selim et al. (2019) performed active vibration control of composite plates integrated with piezoelectric layers of functionally graded graphene nanoplatelets. The theoretical formulation of composite plates with piezoelectric layers has been developed using the element-free improved moving least squares Ritz method in conjunction with higher order shear deformation theory (HSDT). While the mixture rule was used to estimate the effective poission ratio and mass density, the modified Halpin–Tsai model was used to estimate the effective Young's modulus. Piezoelectric layered GPL (graphene nanoplatelets) volume fractions, distribution patterns of GPLs, the width ratio of the total thickness of the plate, the ratio of the piezoelectric layer thickness to the total plate thickness and the effects of boundary conditions were achieved. The effects of such parameters on the natural frequency increase between on and circuit conditions are also discussed. On the other hand, a constant velocity feedback controller was used for active vibration control of GPL reinforced composite plates integrated into piezoelectric layers. In the study, 4 different graphene placed piezoelectric integrated layered composite plates were considered. In the UD model, the graphene volume fraction is uniformly distributed throughout the thickness. In the FG-O model, the graphene content is placed more in the middle and less towards the top and bottom. In contrast, less graphene content is placed in the middle of the GPL-reinforced composite part with FG-X distribution and more graphene content is placed both at the top and bottom. Additionally, the FG-V model has more graphene content at the top and less graphene content at the bottom. At the end of the study, it was shown that placing the sensor and actuator on the same side as a result of increasing the thickness of the piezoelectric layers gave successful results in active vibration control for the FG-V model (Selim et al. 2019). Rogecheva (2019) developed a mathematical model to realize active vibration control of a beam with the piezoelectric effect. Piezoelectric layers completely covered with electrodes are placed on the upper and lower surfaces of the elastic layer. The study showed that with an increase in the number of electrodes, the vibration of the beam is better damped (Rogacheva 2019). Venanzi et al. (2020) compared active and passive base isolation systems for vibration controls for a historical artwork that oscillated under seismic stimuli and was at risk of sliding. Passive floor isolation systems consist of a spring shock absorber. Passive base isolation systems can protect the structure against a certain seismic intensity. In case of unexpected earthquake effects, an active control system consisting of an actuator integrated into the foundation of the building is proposed. The actuator produces control forces to resist seismic movements. In the study, where non-linear analyzes were carried out in the time domain, it was determined that the sliding displacements in the passive base insulation artwork decreased by approximately 7% at the lowest friction coefficient, 0.25, and the active control system decreased by 95%. It has also been determined that the oscillations occurring in the artwork under the earthquake effect are reduced by approximately 80% and 27% in active and passive control systems, respectively (Venanzi et al. 2020). Fu et al. (2022) conducted dynamic performance analyzes of a 492 m high structure with an active adjustable mass damper that was exposed to 4 consecutive land typhoons that occurred within a month. Wind-induced acceleration responses recorded by structural health monitoring systems as a result of the typhoon were examined. Random reduction technique was used to determine the dynamic parameters of the structure such as natural frequency and damping ratios. The ATMD (Active tuned mass damper) system basically consists of a pair of damping mass blocks, associated support structures and actuators. Linear quadratic regulator (LQR) method is adopted as the control strategy of the ATMD system. ATMD actively worked in the first three typhoons that occurred. However, it was determined that the 1st and 2nd mode natural frequencies of the structure decreased by 0.69% and 0.45%, respectively, due to its non-operation during the most recent Typhoon Yagi. It has been determined that if ATMD is on, the damping ratios of the structure increase by approximately 3 to 5 times in all modes. In general, ATMD alleviated wind-induced responses in high-rise buildings by reducing fundamental oscillation mode vibrations and increasing damping ratios. However, it has been found that the control performance of ATMD decreases with increasing vibration amplitude in high modes (Fu et al. 2022).
Rebecchi et al. (2022) conducted shaking table experiments on a full-scale model building with an innovative hydraulic active mass damper to improve the seismic performance of a structure under multiple earthquake warnings. Of the two model buildings, both of which contain soft storey effects, one has an active mass damper and the other does not. Full-scale buildings with a single-span reinforced concrete carrier system are designed with a floor height of 2.5 m and openings of 5*2.1 m. In the study, a shaking table with a hydraulic unit, dimensions of 5.60*7.0 m, a maximum ground acceleration of 6 g and a displacement capacity of 500 mm was used. An acceleration-time series with the highest value of earthquake ground acceleration of 0.32 g was used. In the buildings whose experimental setup is shown in Fig. 8, 18 piezoelectric-based accelerometers were placed in both directions at the nodes of all floors of the buildings.

Shaking table experimental setup applied to model buildings with active mass dampers (Rebecchi et al. 2022)
In Fig. 8, number 1 represents the active mass damper, 2 represents the masonry walls, 3 represents the columns, 4 represents the foundation connection mounted on the shaking table, and 5 represents the slabs. In addition, accelerometers placed at the nodes of the structures were also imaged. In the study, the active control system was arranged according to the position of the actuators that create inertial forces in the direction of ground shaking, the position of the accelerometers that can measure the dynamic response, and the adjustment of the control algorithm. Control forces are applied by the actuator from the roof of the building. AMD has mastered the Sky-Hook algorithm with direct speed feedback control that does not require the creation of a building model. The algorithm defines a control force proportional to the relative speed of the roof of the building, calculated as in Eq. 5. Gain must be adjusted appropriately to ensure the performance and stability of the system under all operating conditions.
In the study, the mode shapes and natural frequencies of both buildings were obtained as a result of the sine waves produced by the 1.5 kg vibrodine placed on the roof. The 1st mode frequencies of the structure without AMD and with AMD were obtained as 8.39 Hz and 8.38 Hz, respectively. Although there was no significant difference in the 1st mode frequencies, the 2nd mode frequency values were obtained as 31.9 and 29.9 Hz, respectively. In addition, floor displacements, energy absorption capacities and damage conditions were also determined in the study. The results of the study showed that under the highest earthquake loading used in the same experiment, collapses occurred in the walls of the building without AMD, damage occurred in the slab-column connections on the first floor, and in the structure with AMD, there was no damage to the reinforced concrete elements, but large cracks occurred in the infill walls. In addition, it was determined that the relative storey drift rates were 0.25% and 0.90% in structures with and without AMDS, respectively. It was also determined that the input energies of the structure with and without AMD in kJ were 12.6 and 16.3, respectively. Finally, it was calculated that AMD produced 51 kN control force against the strongest ground motion against 116.7 mm displacement (Rebecchi et al. 2022).
Studies on the active control system in Civil Engineering have shown that the active control system consists of an active mass damper, a control algorithm that manages the active mass damper, an actuator that produces control forces against earthquake effects, accelerometers that measure dynamic responses and data collector units. Actuators and accelerometer sensors are generally preferred based on electrical energy under the influence of pressure and piezoelectric material that can change shape under the influence of an electric field. Different control algorithms such as PID, PD, LQR have been tried to manage active mass dampers. The dynamic model of the active control system developed for structures is generally based on numerical methods based on differential equations. The proposed numerical methods were applied to the structure with nonlinear analyzes in the time domain. To test the accuracy of the numerical methods, shaking table experiments were applied under the influence of acceleration data from earthquakes occurring around the world. In addition, harmonic sinusoidal loadings with forced vibration characteristics have also been preferred in some studies. Earthquake data used in studies were generally preferred to be lower than the gravitational acceleration value. Shaking table tests were applied on scaled building models. Building models are adapted for active controlled and active uncontrolled situations. ARX models were also used to adapt the proposed active controls to earthquakes that may occur specific to the structure, that is, to recognize the earthquake of the structure. It is of great importance to prove that the structure is uncontrolled by determining dynamic parameters such as damping, frequency and mode shapes with ARX models. In some studies, active vibration control was achieved with piezoelectric materials used as sensors and actuators in the upper and lower parts of the elastic layer, respectively. Because piezoelectric materials have both actuating and sensing properties. However, in order for piezoelectric materials to operate in high frequency environments and at the same time to polarize faster under the influence of dynamic vibrations, they were operated with graphene nanosheets. The results show that dynamic vibrations are well damped even in high frequency environment. The findings obtained in the studies conducted in the literature are based on how much control force is produced by the actuators and at the same time, how much of the earthquake energy entered into the structure is absorbed thanks to the control forces produced. Studies have shown that the control forces are provided by an actuator placed on the roof of the building. In the studies carried out, the dynamic reactions occurring in the floors of the building based on acceleration and displacement were calculated. Additionally, it was determined to what extent the damping ratio of the structure changed thanks to active control.
As a result of the studies in the literature, it has been understood that active mass dampers require high external energy to operate. The power supply that may be interrupted during an earthquake may cause the active control system to fail. Therefore, it is thought that an innovative system that can provide continuous energy to the system should work. It is anticipated that this innovative system may be based on non-materials that can detect any vibration energy and provide electrical energy. It is also thought that if the control algorithms that manage the active mass damper are incorrectly selected and designed, the system will lose stability. In this case, a closed loop must be designed to limit the control algorithm. The spontaneous changes that will occur between the moment the earthquake affects the structure and the moment it leaves the structure can be considered as a closed loop. In addition, considering the cost of the main components of the active control system, the system is not very economical. In accordance with the main principle of engineering, it is expected that an innovative control system that can adapt itself to earthquakes with low cost and high reliability will be studied in the future. Innovative systems to be proposed will be an important parameter, as will shaking table tests and non-linear analyzes in the time domain under the influence of earthquake data that will be scaled specifically for the structure. Earthquakes with ground acceleration values greater than the gravitational acceleration that may occur unexpectedly in the structure should also be included in the studies and the effectiveness of the system should be verified. All these requirements should be considered for real reinforced concrete, wooden, masonry and steel structure models of different scales. In addition, this system is expected to be tested both numerically and experimentally in structures that exhibit soft storeys, torsion, weak storeys and carrier system irregularities.
2.3 Studies on Semi-Active Control Systems
Semi-active control systems are known as systems that do not require as much energy as active control systems and do not require a control algorithm. Semi-active control systems that use a series of control algorithm techniques and adjust these systems with an external voltage have been used to adapt damping devices and passive base isolation systems to far- and near-field earthquakes (Mehrparvar and Khoshnoudian 2012). Semi-active control systems have also been developed by operating passive control systems together with control force generating mechanisms such as piezoelectric actuators (Qiu et al. 2009). Many studies have been carried out on semi-active control systems in the fields of Civil Engineering. Rodríguez et al. (2012) operated the injected MR liquid dampers with a force-derivative feedback control algorithm to design a semi-active control system in an 8-layer, 2-degree-of-freedom structure with an elastomer-based base isolation system. The maximum force and stroke of MR liquid dampers, which show viscoplastic behavior when magnetic flux is applied to the liquid inside the mechanism, are 20 kN and 100 mm, respectively, current resistance is 60Ω and maximum current is 0.3A. The control forces produced by the force derivative feedback control algorithm designed to manage MR fluid dampers were calculated depending on the viscoplastic damping ratio and speed of the fluid. The normalized state of the Bouc-Wen model was preferred in the dynamic model that calculates the control forces produced by MR fluid dampers. In the study, nonlinear analyzes were conducted in the time domain using data from major earthquakes such as El Centro, Kobe and Erzincan. It was determined that the floor displacements and accelerations of the building with only passive base isolation system decreased by approximately 55% and 76.5%, respectively, with the addition of MR liquid dampers, and by 30% and 23.5% in the case of only MR liquid dampers and no passive system(Rodríguez et al. 2012). Shi et al. (2013) proposed the H"∞" control algorithm in the frequency domain for the semi-active base isolation system. The control forces planned to be produced from the MR liquid dampers managed with this control algorithm are obtained by multiplying the acceleration and displacement values with the control gain. The full-scale steel frame has a passive base isolation system based on a circular pendulum system with a friction coefficient of 0.01 and a dominant period of 3.0 s. MR liquid dampers with 10 kN force, 200 mm stroke and 3 Ampere (A) current capacity are integrated into the full-scale steel frame by managing with the H∞ control algorithm. Earthquake tests were applied to the steel frame mounted on a shaking table with a span of 2.5 m in both directions, under the influence of earthquakes with maximum ground accelerations ranging from 0.25 g to 1.07 g. Floor accelerations and floor displacements were taken into account in the study. According to the largest earthquake data (1.07 g), it was determined that floor accelerations and displacements decreased by approximately 43% and 7%, respectively, thanks to the semi-active system created by adding MR liquid dampers managed by the H"∞" control algorithm to the passive base isolation system (Shi et al. 2013). Zhu and Rui (2014) connected MR liquid dampers (MRD) based on the Bouc-Wen Model and magnetorheological elastomers in series through a spring to design a single-degree-of-freedom system for semi-active vibration control. To verify the semi-active control system, vibrations generated from a vibrator were transferred directly to the accelerometer and then to the data acquisition unit. The same vibration data was given to the mechanism consisting of a spring and MRD, which was supplied with current by a source passing direct current, and from there the vibrations were given to the primary mass of the single degree of freedom system. The vibrations occurring in the mass were collected in the data collector via the accelerometer. The reabsorption of excess vibrations here was transmitted to the MREs through a current source. In MREs, it transmitted vibrations that were absorbed into the secondary mass. Vibrations were collected in the data acquisition unit via the accelerometer. The vibrations transferred directly to the data acquisition unit from the beginning were compared with the vibrations absorbed with the help of MRD and MRE. The results showed that the structure with MRD alone reduced the accelerations by approximately 40%, and the structure with both MRD and MRE reduced the accelerations by 50% (Zhu and Rui 2014). Pardo-Varela and Llera (2015) developed a piezoelectric-based semi-active friction damper for a full-scale three-story steel frame. Control forces were generated by piezoelectric-based actuators working with a voltage amplifier to protect the structure against seismic effects. The mechanical interaction between piezoelectric actuators and passive friction dampers is modeled by a series connection. By combining the friction forces formed on the sliding surface of the friction dampers and the control forces produced by the piezoelectric actuators, the structure tried to counter seismic effects. Dynamic test results showed that as the voltage applied to the piezoelectric actuators increased, the control forces produced increased, and the friction forces increased depending on the friction coefficients. Analytical results have shown that although passive friction can reduce the seismic response of a building, its effectiveness depends on the relationship between the friction force and ground motion intensity. It has been shown that only friction dampers could not reduce the maximum acceleration at the desired level, but the best expected seismic performance level was achieved with the semi-active control system designed with the addition of piezoelectric actuators (Pardo-Varela and de la Llera 2015). Krishnamoorthy et al. (2017) designed a semi-active damper by integrating a variable orifice fluid damper managed by a radial function-based neural network algorithm into the system, in order to eliminate the risk of resonance that may occur due to the exposure of inclined surface sliding passive base isolated structures to near-field earthquakes. The force produced against seismic effects from the proposed semi-active control damper system was calculated according to the displacement formed on the sliding surface of the passive base isolation system, the balancing force produced depending on the mass and frequency of the isolator, the friction force formed on the sliding surfaces, and the control forces produced by the management of variable fluid dampers by neural networks. To prove the effectiveness of the semi-active control system, numerical analyzes were applied separately under the influence of harmonic ground accelerations and real ground accelerations. The study results showed that displacements and accelerations decreased by approximately 63% and 48%, respectively, with the use of the controlled system. Additionally, it was determined that the maximum control force produced was 529.65 kN and the damping ratio was 0.427 (Krishnamoorthy et al. 2017). Azimi et al. (2017) proposed a semi-active control algorithm consisting of a single input that manages the hydraulic damper connected to the building diagonals and provides the tension of the diagonal elements during stimulation, without the need for a complex algorithm structure in low-rise and high-rise buildings. Three buildings with 1–5 and 10 floors were used to demonstrate the effectiveness of the designed innovative semi-active control algorithm. Uncontrolled, proposed innovative controller (IBFC = flexibility compensator integrated into diagonals), LQR control algorithm and only passive controlled cases were examined in three buildings where numerical analyzes were carried out under the influence of El Centro (0.32 g) and Northridge (0.34 g) earthquake ground accelerations. In the IBFC case, it showed approximately 40% more performance than the LQR controller, thanks to less input data and less calculation time. What is meant by performance here is the performance index determined according to the displacement and acceleration of the structures. It has been determined that LQR and IBFC have approximately the same performance in terms of controlling earthquake energy. It has been observed that the proposed system (IBFC) is simple compared to LQR and that the time delay that may occur in the application of control forces is not at a level that could cause large differences in the reactions (Azimi et al. 2017). Salari et al. (2019) proposed an innovative tunable mass damper to realize semi-active control of inclined pendant cables. The innovative control system proposed in this study consists of a TMD (tunable mass damper) with a mass of 2% of the total mass of the cable and some springs and MR dampers placed parallel to each other. In this study, an innovative mechanism is proposed to ensure continuous movement of the TMD device along the cable and optimize its position. Nine different control strategies, including sky-hook, an on–off sky-hook, and a passive-on strategy, as well as a fuzzy control strategy, were used to manage the proposed innovative control system. In the study, nonlinear analyzes were carried out in the time domain by establishing the finite element model of the cable in the OpenSees program. It was found that all control algorithms used in the study significantly reduced cable displacement. Numerical analysis results showed that the fuzzy control strategy is the most effective system in reducing displacements with a rate of 70% (Salari et al. 2019). Gutierrez Soto and Adeli (2019) conducted studies to combine passive base isolation structures with semi-active and active control systems to design a smart highway bridge structures. The control algorithm used in the study to reduce earthquake-induced vibrations is based on evolutionary game theory and multiplier dynamics. The passive base isolation structure with the innovative semi-active control system was numerically examined under the influence of 6 different near-field earthquakes with the largest ground acceleration values ranging from 0.313 to 1.157 g. Dynamic equations were established according to the bilinear force–deformation relationship so that the passive base isolation system exhibits hysterical behavior in the x and y directions. The semi-active control system is provided with MR dampers. The damping energies or forces produced by the MR damper can be adjusted by externally applied voltages. In order to reduce the dynamic vibrations occurring in the structure, it takes into account the measurements taken from the sensors and calculates the voltage and currents to be given to the MR dampers accordingly. Control forces were calculated by taking into account the speed and damping of the fluid that would occur as a result of the voltage applied to the MR damper. The multiplier dynamic controller that manages the MR dampers takes measurements from the sensors placed on the structure. A function was used to calculate the total voltage value to be given to the MR dampers from the measurements. Control forces are generated by the external voltage effect applied to the MR dampers and transmitted back to the structure through sensors. In order to demonstrate the effectiveness of the multiplier dynamic controller in the study, passive control as well as Lyapunov and LQG control algorithms were taken into account. Numerical analysis results show that the use of the pluralistic dynamics controller reduces the displacements by approximately 70% compared to the passively controlled system, by 50% in the LQG case, and by 23% in the Lyapunov case. This study has proven that the multiplier dynamic controller is a data-based control strategy that can produce a response according to the measurements taken from the structure and can be adapted to any earthquake (Gutierrez Soto and Adeli 2019). Bakhshinezhad and Mohebbi (2020) reported the effectiveness of semi-active liquid viscous dampers (SAFVD) in order to reduce seismic effects in multiple modes in a geometrically non-linear 8-storey structure, using non-linear time domain data under 20 earthquake data with the peak ground acceleration value varying between 0.32 and 1.07 g. have shown through analysis. For the production of control forces against seismic effects, which can adapt itself according to the dynamic response of the structure and also for earthquake warnings. Non-dominated sorting genetic (NSGA) algorithm has been used to solve multi-objective optimization problems. SAFVDs are positioned on the plane of the V-shaped crosses placed on the structure, connecting them to the beam. Relative storey drifts, storey accelerations, base shear forces and balancing forces corresponding to relative storey drifts were used as operating parameters in controlled and uncontrolled situations. Numerical analysis results showed that as a result of managing SAFVDs with NSGA, relative storey drifts, storey accelerations, displacements and base shear forces in the structure decreased by approximately 50%, 44%, 33.5% and 21.5%, respectively. In addition, it has been revealed that the balancing force produced by a controlled structure when it makes a 2% relative storey drift against seismic effects is equivalent to the balancing force produced by an uncontrolled structure that makes a 5% relative storey drift. The proposed semi-active vibration control system is also discussed with active control working with Newmark-based instantaneous optimal control algorithm. It has been determined that if the semi-active control system achieves a 15% damping ratio, it will perform approximately the same as the active control (Bakhshinezhad and Mohebbi 2020). Javadinasab Hormozabad and Ghorbanı-Tanha (2020) investigated the effectiveness of a semi-active control system based on a fuzzy algorithm control algorithm to reduce seismic vibrations that may occur in a cable-stayed bridge with complex dynamic behavior, low damping capacity and flexible behavior. The semi-active control system has been developed with MR dampers. The cable-stayed bridge was prepared in three dimensions in the OpenSees program and the effectiveness of the semi-active control system with fuzzy control algorithm was investigated by comparing it with Sky-Hook and passive control. In addition, an efficient network was created by applying the semi-active control algorithm to the steel bridge in the MATLAB environment. Nonlinear analyzes in the time domain were applied to the bridge under the influence of the highest ground accelerations varying between 0.11 and 0.85 g. The results showed that the semi-active control systems proposed in this study can reduce the maximum displacement value of the slab by 80% for relatively small PGA values and more than 40% for large values. It has also been shown that the fuzzy control algorithm can reduce floor vibrations by 30%. It has also been determined that the semi-active controlled system created with the fuzzy control algorithm has a better performance than the passive system and the SkyHook algorithm (Javadinasab Hormozabad and Ghorbani-Tanha 2020). Semi-actively controlled structures can have very uncertain and non-linear characteristics when exposed to very severe earthquakes. It requires real-time control actions for changing conditions because some control groups cannot adapt to these behaviors. Saeed et al. (2022) formulated an online self-adjusting brain emotional learning-based intelligent controller (ST-BELBIC) to seek a solution to this situation and used it to reduce the seismic vibrations of a three-story building. The proposed control system is compared with numerical simulations made with fuzzy-based PID controller and LQR controller. Numerical simulations were carried out on a 3-storey scale structure under the influence of earthquakes with the peak ground acceleration values varying between 0.229 and 0.742 g. In the study, the highest damping force produced by the approximately 2.25 Volt supply voltage given to the MR liquid dampers was obtained in the ST-ELBIC controller with approximately 1500 N. The average highest performance index against given earthquakes was determined in the fuzzy-based PID controller. The average performance index is proposed as J coefficient in this study according to the highest displacement, speed, acceleration, base shear force and peak shear force values (Saeed et al. 2022). Wang et al. (2021) investigated the mechanical properties of a piezoelectric ceramic friction-based semi-active control (PCFD) system. The basic logic in this study is based on the formation of real-time friction with the reaction force that will occur when the bolts reduce the large deformation of the piezoelectric material under the effect of a voltage. In this research, the behavior of piezoelectric materials under the influence of seismic stimulation, which will occur due to the deformation of piezoelectric materials under the influence of a voltage and the reduction of the effect of deformations that will lead to collapse with the effect of applied bolts, has been tried to be determined by cyclic loading test and some numerical analyses. Fuzzy neural network algorithm was used for the designed semi-active control system. The adaptive learning function of the adaptive network-based fuzzy inference system (ANFIS) is used to generate fuzzy rules and fuzzy neural network controller (FNNC). To demonstrate the effectiveness of semi-active piezoelectric-based friction dampers with the proposed control algorithm, it has been applied to a three-storey structure in comparison with the LQR controller. In the study using Sylmar, Chi-Chi and El Centro earthquake records, floor displacements, floor accelerations and relative floor drifts were used as parameters. It has been determined that the floor displacements in the uncontrolled structure are reduced by approximately 41.5% and 50% with FNNC and LQR controllers, respectively. As a result of the study, it was revealed that similar results were found in floor accelerations and relative floor drift rates. The interesting result in this study is that piezoelectric-based friction dampers show appropriate performance by reaching a front force of 493 N with 150 V external voltage to dampen large earthquake ground accelerations such as El Centro within the structure frame (Wang et al. 2021). Bathaei and Zahrai (2022a, b) used predictive control to avoid time delay in the control forces to be produced to be applied against seismic effects in the MR damper-based semi-active control system with a single degree of freedom structure. As it is known, MR dampers produce control forces under the influence of voltage provided by a control algorithm. In this study, a fuzzy inference system algorithm was preferred to both produce appropriate control forces against seismic effects and to prevent time delay. Numerical simulation studies were carried out under the influence of 20 different earthquake data with the highest ground acceleration values ranging from 0.21 to 0.82 g. The single degree of freedom system was modeled in the OpenSees program, and the fuzzy approach algorithm was defined for the structure in the MATLAB program. Numerical simulation studies have shown that under the influence of the largest earthquake ground acceleration, the uncontrolled structure had a maximum displacement of 12.58 cm. It was determined that there was a displacement of 10 cm without a time delay in the controlled system, 10.58 cm with a time delay, and 9.99 cm with a time delay with the proposed system. In addition, a base shear force of 12,279.50 kN was observed in the uncontrolled system. It was determined that the base shear force was 9534.27 kN in the controlled system without time delay, 9790.11 kN with time delay, and 9482.40 kN in case of time delay with the proposed system. The study results showed that the fuzzy inference system algorithm provides the semi-active control damping system with a reasonable level of earthquake energy damping ability by compensating for the time delay (Bathaei and Zahrai 2022a).
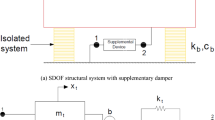
Bathaei and Zahrai (2022a, b) used the sliding fuzzy logic algorithm to produce damping forces at the expected level in the MR liquid damper-based semi-active control system to reduce the vibrations of an 11-storey non-linear structure under seismic effects (Bathaei and Zahrai 2022a). The sliding fuzzy logic algorithm has variable ranges for membership functions rather than fixed function memberships. This algorithm is applied in two different decision situations. The first is decision making based on speed, and the second is decision making based on speed and displacement. Figure 9 presents the schematic diagram of the proposed semi-active control system. By applying the earthquake to the structure, the velocity and displacement responses from the structure are first measured. According to these responses, the fuzzy control algorithm was activated and the appropriate voltage values for the operation of the MR dampers were calculated. Control forces were generated to resist the earthquake effect according to the external voltage values applied from the MR dampers.

Operation of semi-active control system with fuzzy control algorithm (Bathaei and Zahrai 2022a)
In the study, the damping force (control force) to be obtained from MR liquid dampers is defined in Eq. 6. In Eq. 6, F is the damper force, C0 is the damping constant calculated according to the applied voltage,\(\dot{x}\) is the displacement rate of the fluid at the damper ends, and α, z are the parameters that can change according to the applied voltage.
The study results showed that the greatest vibration control was achieved by applying an external voltage of 10 V to the MR dampers. It was determined that the maximum displacement values decreased by approximately 11% under the influence of the highest ground accelerations affecting the structure (PGA = 1.0 g). However, it was determined that this system reduced the maximum displacement by 63% at the lowest ground acceleration (PGA = 0.1 g) values. It was also determined that under the effect of the highest and lowest ground acceleration, the base shear forces decreased by 17% and 44%, respectively (Bathaei and Zahrai 2022b).
Wang et al. (2023) proposed a semi-active control system that provides stiffness and tuned mass semi-active damping that can be adapted to any earthquake in two directions, which is successful in providing seismic control in an asymmetric structure bearing torsion risk (Wang et al. 2023). Hosseini et al. (2023) proposed a semi-active tuned mass damper to improve the seismic behavior of steel frames with irregular layout (Hosseini et al. 2023). Jalali et al. (2023) using different algorithm techniques such as Clipped-Optimal Control (COC), Lyapunov, Bang-Bang and Fuzzy and two Passive-On (P-On) and Passive-Off (P-Off) by taking into account the structure-soil interaction. They used the MR damper semi-active control system in multi-degree of freedom frameworks. The study results showed that COC and Bang-Bang algorithm techniques are the most successful algorithm techniques in reducing seismic effects (Jalili et al. 2023). Zizouni et al. (2023) operated an MR damper-based semi-active control system using a hybrid fuzzy sliding mode controller on a scaled three-storey building model. The results of the analysis in the time domain showed that the acceleration values caused by earthquakes were reduced by 65% (Zizouni et al. 2023). Shuang et al. (2024) provided seismic control in the bridge structure with a displacement-based feedback control mechanism and a semi-active control system with MR damper (Shuang et al. 2024).
Studies on semi-active control systems in the literature have shown that the control system is generally built under the influence of a very small external power source and using a control algorithm logic. It has been understood that these systems are generally either rubber systems that absorb earthquake energy by making permanent deformations at the insulator level, or friction-based passive base isolation systems that produce earthquake friction forces from curvilinear surfaces with different geometric formations and are managed with a control algorithm. These control algorithms are generally preferred: Skyhook, LQR, H, PID, genetic based algorithm types and fuzzy control algorithms. With these control algorithms, the external voltage value is calculated and applied to the MR liquid dampers to produce enough control force to absorb the earthquake energy. MR liquid dampers create damping depending on the relative speed of the liquid inside it relative to the speed of ground motion under the influence of an external voltage. The electromagnets in the system of MR liquid dampers create a magnetic field with the effect of voltage, allowing the liquids to gain relative speed. Structures with semi-active control systems have been developed by connecting MR liquid dampers, which work with the appropriate control algorithm, to the protected capacity areas of the diagonals, which generally work by absorbing the horizontal force of the earthquake, of structures with passive base isolation systems. It is seen that these structures are examined both in the shaking table, which allows earthquake tests to be carried out at scale, and in the time domain, with non-linear analysis. In general, the analytical model of the passive base isolation system is first created. Later, empirical relations were developed based on which variables can produce voltage-dependent control forces from semi-active control systems. Finally, control algorithm logic has been established to accurately calculate the voltage values to be given to the system in order to produce the most effective control forces from MR liquid dampers. The structures with semi-active control systems examined in the studies were modeled in 3D in programs such as OpenSees. Then, the control algorithms developed to generate control forces were applied to MR fluid dampers in the MATLAB environment. Nonlinear time-history analyzes and shaking table experiments were carried out on semi-actively controlled structures that were under the influence of earthquakes with peak ground accelerations ranging between 0.1 and 1.07 g. In the studies, relative storey drifts, maximum displacements, storey accelerations, base shear forces, earthquake energy absorption capacities and produced control forces were used as parameters. These parameters were evaluated under the influence of either near-field or far-field earthquakes. Although vibration controls have been successfully carried out with all control algorithms used in the studies, it has been seen that the most effective control algorithm is systems with fuzzy control algorithms that produce sufficient control forces by working with a small voltage such as 10 V. It has also been determined that these algorithms can compensate for the time delay in generating control forces.
In this section, it is understood that semi-active controlled systems will be formed by different control algorithms managing MR fluid dampers. It has been concluded that in order to produce anti-earthquake control forces from semi-active control systems, a correct control algorithm should be preferred and a suitable function should be developed and external voltages should be produced. It is thought that the design of these structural system algorithms is complex and there is a possibility of incorrect application, which may cause the structure to lose its stability during an earthquake. In addition, the possibility of a time delay in the production of control forces limits the success of semi-active control systems. In addition, the idea that these systems should be sensitive to all earthquakes should not be ignored. Semi-active control systems detect both near- and far-field earthquakes and produce appropriate control forces without time delay, which is an important parameter. It is seen that the ground acceleration of the largest earthquake studied in the literature is approximately 1.1 g. If the structure encounters a larger earthquake with less pronounced characteristics, the collapse of the structure will not be prevented as a result of not designing the correct algorithm that manages the semi-active control system. In this case, it is very important that if a sufficient power supply is not provided to semi-active control dampers such as MR liquid dampers, earthquake effects must be met by passive base isolation systems. It is thought that a semi-active system equipped with smart materials that can detect the beginning and ending moments of the earthquake can solve this problem by activating the passive base isolation system. In other words, the idea that the control mechanism that is likely to be designed in the future will be able to produce its own energy based on its own algorithm against any earthquake and at the same time create a damping energy by activating the passive system with this energy has become dominant. In this way, it is envisaged that problems such as time delay and energy supply in the production of control forces can be overcome. Multi-degree-of-freedom structures with control mechanisms that are expected to be developed should also be examined under the influence of far- and near-field earthquakes, the highest ground acceleration values of which are approximately 2.2 g, perhaps occurring in Turkey. It is necessary to examine such structures both with nonlinear analysis methods in the time domain and in shaking table experiments. Parameters such as relative storey drifts, floor accelerations, maximum displacement values, damping energies and base shear force that will be caused by an earthquake in buildings should also be taken into consideration in studies. In addition, it is thought that it is necessary to test the effectiveness of the control mechanism in multi-storey buildings with soft floors, weak floors, torsional irregularities and house-bearing system discontinuities.
2.4 Studies on Hybrid Control Systems
Hybrid control is a system that is formed by combining two different passive base isolation systems or by managing a passive base isolation system with an external power source and control algorithm in order to cope with the earthquake effects of buildings. Its main purpose is to compensate for the deficiency of a passive or active system that fails during an earthquake with other auxiliary passive or active systems. For example, in case the external power supply is cut off or the control algorithm is applied incorrectly, earthquake effects can be controlled with passive base isolation systems. Many different studies have been conducted on these control systems in the literature. Hybrid control systems are generally composed of active mass dampers and adjustable mass dampers controlling passive base isolation systems (Li and Cao 2015). Many experimental and numerical studies have been carried out using such hybrid viscous damper systems (Brodersen et al. 2016).
Oliveto et al. (2010) proposed a hybrid base isolation system combining high damping rubber bearings (HDRB) and low friction sliding bearings (LFSB). In the hybrid base isolation system, rubber bearings are defined as visco-elastic sliding insulators and friction adjustable system. HDRBs are modeled as bilinear hysteretic and LFSB as Culomb friction damper. In the study, after developing an analytical model for the free vibrations of the hybrid base isolation system, the least squares method was used to determine the dynamic system parameters. The analysis results showed that there were no negative consequences except that the visco-elastic model did not reflect the nonlinear behavior of the rubber system correctly (Oliveto et al. 2010). Tso et al. (2013) proposed a hybrid vibration damper (HVA) with passive tunable mass dampers using a linear translational feedback signal for vibration control of flexible structures. In experiments conducted on a cantilever beam, moment and horizontal shear forces are produced by TMDs at the anchorage position by applying vibration to the beam. Controllers in a closed-loop perspective that manage TMDs bring a polarization damping effect against vibrations. Polarization is provided by piezoelectric actuators that are part of the control system (Tso et al. 2013). Engle et al. (2015) proposed a hybrid system consisting of a self-centering isolation system and tuned mass dampers after the earthquake, which allows the floor slabs placed on curvilinear surface supports to move according to the main frame structure during the earthquake. One of the main purposes of this study is to ensure that floor slabs are kept separate from the structure to reduce seismic effects. However, to prevent the floors from colliding with the columns due to excessive displacement, rubber buffers with certain rigidity have been placed between the floor and the frame. The effect of the stiffness of the buffers is similar to conventional TMDs, where the system performs optimally for a certain value depending on the excitation frequency. It is also aimed to distribute the earthquake energy through the friction generated from the contact surfaces of the curvilinear supports. Size optimizations were also made for the coefficient of friction and the rigidity of the bumpers. To be used in the study, a 2-degree-of-freedom design was designed, with the first floor consisting of movable plates formed by curvilinear surface supports. Similarly, the effectiveness of the system was investigated in 4, 7 and 10-storey buildings. Considering the dynamic responses obtained from all structures, it was determined that relative floor drifts were reduced by 45% in the presence of movable floors. The most interesting feature of this study is that the proposed hybrid control system exhibits approximately the same performance as adjustable mass dampers (Engle et al. 2015). Markou et al. (2017) proposed a hybrid base isolation system (HBIS) consisting of high-damping rubbers and low-friction spherical surfaces for the reinforcement of a 4-storey reinforced concrete structure in Solarino Sicily. A differential equation-based mathematical model was created by representing friction-based insulators with the Coulomb friction model and high-damping rubber bearings with the five-parameter trilinear hysteretic model. To investigate the effectiveness of HBIS, a single degree of freedom mass model of the structure under investigation was developed and Monte Carlo simulations were applied (Markou et al. 2017). Park and Park (2019) created an analytical model and optimized the hybrid control system that combines active adjustable mass dampers (active control) and linear viscous dampers (passive control) in order to control vibrations caused by dynamic loads acting on structures such as wind and earthquake. Active control systems generate control forces using a genetic algorithm. The optimization of the proposed hybrid control system was made based on the principles of cost, control force produced against earthquakes, reduction of reaction accelerations, relative storey drifts, base shear force and excessive moments. As a result of the optimization, a preliminary model was created. Numerical studies were carried out in a 30-storey building to investigate the effectiveness of the analytical model that forms the hybrid control system. The structure was exposed to earthquake loading in both wind and time domains. The study results showed that the peak load response accelerations and displacements in the uncontrolled structure were reduced by approximately 90% and 79%, respectively, with the proposed hybrid control system. Additionally, it was determined that the largest peak accelerations were reduced by 75% under wind effect. It has been found that the proposed hybrid control system can show better control performance at lower costs than traditional active or passive base isolation systems (Park and Park 2019). Du et al. (2020) proposed a hybrid control system combining viscous damper (VD) and buckling-restrained braces (BRB) to improve the earthquake performance of high-rise buildings. As it is known, the dominant control performance criteria for vibration controls in high-rise buildings are stiffness, strength and damping characteristics. The aim of this study is to design a more reliable and economical control system by increasing the damping ratio of the structure with viscous dampers and increasing the strength and rigidity of the structure with BRB. In the study, firstly, the design and optimization of both viscous dampers and buckling-prevented braces were carried out. Firstly, the axial force–deformation rate curve of VDs is presented. Then, by applying nonlinear analyzes in the time domain, it is shown where the VDs will be optimally placed in the structural system. Then, the hysteretic behavior of the buckling-prevented braces, that is, the force–deformation relationship, was revealed. Stress–strain curves have also been determined under a series of earthquake loadings. After optimizing the VD and BRBs, the hybrid control system was designed. It has been suggested that the proposed hybrid control system will provide more reliable and economic advantages since it provides stiffness, strength and damping characteristics (Du et al. 2020). Hosseini Lavassani and Shangapour (2022) investigated the functionality of interval type—2 fuzzy logic controller (IT2FLC) in proposed hybrid control systems, taking into account the structure-ground interaction, for high-rise buildings under the influence of far-field and near-field earthquakes. Fuzzy logic controller was preferred because it can work well in both open and closed loop environments without requiring a mathematical model. The hybrid control system proposed in the study consists of MR liquid dampers representing the semi-active control system and adjustable mass dampers (AMD) representing the passive control system. Optimization studies were carried out by taking into account the dynamic parameters of AMDs and the voltages required for the operation of MR. Optimization was applied for tight and loose soils of a 50-storey building with the observer-teacher-student based optimization (OTLBO) method. Nonlinear analyzes in the time domain under the influence of earthquakes with the highest ground acceleration values varying between 0.319 and 0.838 g were applied in the finite element package program (ETABS) for three different building cases. Three different structure states have been defined as passively controlled structure (TMD), hybrid controlled structure (TMD + MR) and uncontrolled structure. Numerical analysis results showed that the maximum displacement of the uncontrolled structure in loose ground was reduced by 10.54% in the largest near-field ground motion and by 27.31% in tight ground. In the largest far-field ground motion, these values were found to be 31.90% and 31.57% for loose and tight soils, respectively. In general, it has been observed that the hybrid control system with fuzzy logic control algorithm reduces building responses in terms of floor displacement and acceleration in absorbing earthquake energy. It has also been found that the proposed hybrid control system is more effective in reducing structure responses than the passive control system (Hosseini Lavassani and Shangapour 2022). Zare Golmoghany and Zahrai (2021) proposed a hybrid control system combining friction damper (FD) and vertical shear panels (VSP) to reduce structural damage caused by earthquakes while improving the seismic performance of structures. The aim here is to require friction dampers to first dissipate the earthquake energy when moderate earthquakes affect the structure, and to require both vertical shear panels and friction dampers to take an active role in dissipating the seismic energy generated in the structures in the event of large earthquakes. Since the shear force required for the flow of the VSP is greater than the friction force of the FD, earthquake energies are first distributed by the FD. The inadequacy of VSP's fatigue strength and ductility under low cyclic loads is compensated by FD. The hybrid control system obtained by combining VSP and FD was first modeled in the ABAQUS program and thrust and cyclic loading analyzes were carried out. It was obtained from the analysis results that it has a displacement capacity of 50 mm against a base shear force of approximately 300 kN. To examine the contribution of the hybrid control system to the earthquake performance of a 5-storey steel structure, controlled and uncontrolled structures were modeled in the SAP2000 program and nonlinear analyzes were conducted in the time domain. In the study, both far-field and near-field earthquakes were taken into account. It has been determined that under the influence of far-field earthquakes, only FD dissipates earthquake energy and all VSPs remain in the elastic region. In near-field earthquakes, it has been observed that the beams and all other load-bearing elements remain in the elastic region, where both VSP and FD distribute the earthquake energies. It has been determined that this proposed system reduces the base shear forces in near-far field and near-field earthquakes by approximately 10% and 3%, respectively. As similar results, it was concluded that the hybrid control system has significant effects in reducing relative floor drifts, peak displacements and floor accelerations against both near-field and far-field earthquakes(Zare Golmoghany and Zahrai 2021). Zareie et al. (2021) developed a hybrid control system based on magnetorheological fluid (MRF) and shape memory alloy (SMA). The basic logic here is based on the production of damping force from MRF and SMAs by means of an electrical power source as a result of subjecting the hybrid control system to pressure or tension under the influence of external load. In this study, the preferred SMAs were used separately as NiTi49.5 and FeNiCuAlTaB due to their shape memory effect and high flexibility. MR liquid dampers were preferred to provide damping with the magnetic field formed under the influence of an electrical power source. In this research, the system was examined for two electric current values, 0 A and 1 A, respectively, corresponding to the minimum and maximum electric currents that provide the minimum and maximum intensity of the magnetic field for this damper. To examine the effectiveness of the hybrid control system, numerical simulations under quasi-static load conditions were applied separately for MRF, SMA and SMA-MRF support systems. Hysteretic responses and energy dissipation capacities were taken into consideration in the study. Numerical simulations showed that active MR liquid dampers achieved the most effective damping ratio value of 0.32 with both SMAs compared to others. It was also found that the lowest damping ratio was in the system with only NiTi SMA. It was observed that for a displacement value of approximately 25 mm, the NiTi system had a force capacity of 190 kN and the FeNiCuAlTaB system had a force capacity of 181 kN. In active MRFs operating at 1A current value, a force capacity of 185 kN against approximately 25 mm deformation was determined in the analysis results. It was concluded that the best performance in terms of hysteretic response is the hybrid control system with SMA type NiTi operating at 1A current value. A force capacity of 350 kN was reached for a displacement of approximately 25 mm (Zareie et al. 2021).
Hu et al. (2022) used displacement-based nonlinear analysis to verify the self-centering rocking core-based hybrid control system (HSRC). 3-storey and 6-storey buildings with HSRC systems were analyzed by a non-linear method in the time domain under the influence of earthquakes with an average spectral acceleration value of 1.5 g. The self-centering shaking of this system under the influence of an earthquake is ensured by the friction spring and viscous damper added to the articulated support elements applied to the building system. In the study, the combination of friction spring and viscous dampers was defined as HSD. In addition, articulated steel braces also serve as a backup energy absorber against structural collapses that are likely to occur in larger earthquakes. Figure 10 shows the hybrid control system consisting of friction springs and viscous dampers, which are jointly connected to the reinforced concrete frame and foundation on the first floor of the building.

HSRC structure; a Application of HSRC to the structure, b friction springs, c HSD dampers, d Behavior of HSD under tension and compressive (Hu et al. 2022)
While the reinforced concrete frame presented in Fig. 10 limits relative storey drifts, the HSD placed in the frame provides self-centering and damping to reduce structural or non-structural damages. Steel braces added to the reinforced concrete frame provide spare damping energy in extreme earthquake loads. In the study, firstly, hysteretic curves explaining the force–deformation relationship of the friction springs and viscous dampers were obtained using the cyclic loading method, and then the HSD structure. The HSD structure has been tested to have a force capacity of 40 kN against approximately 15 mm deformation. Then, displacement-based evaluation procedures were proposed by examining the nonlinear behavior of the hybrid control system created with HSD and cross steel elements. Under the shear forces caused by earthquakes, the overturning moment of the hybrid control system (HSCR) is transferred by two HSDs, while the base shear force is transferred by joints (pins). The nonlinear behavior expected from the structure with HSRC is that the structural beams, columns and HSDs remain elastic during the earthquake and the diagonal members maintain the elastic behavior before the development of bed movement in the friction spring damper and beyond the supports yield to resist structural collapse after the occurrence of bed movement has been defined. In the displacement-based evaluation, the design displacement was first calculated depending on the building height and mass by selecting the relative storey drift value, taking into account the expected performance target. Dynamic parameters such as effective mass and height were obtained depending on the design displacement value. The ductility ratio of the single degree of freedom system (SDOF) was calculated according to the yield displacement. Then, the equivalent damping ratio was determined throughout the structure. Here, the yield displacement was calculated based on the relative storey drift obtained in the first step of the cyclic loading, where the friction spring damper showed non-linear behavior. The equivalent damping ratio is obtained as the sum of the damping ratio of the system in the elastic region, the damping of the friction spring and the viscous damping. The effective period was determined according to the spectral acceleration value and equivalent damping ratio obtained according to the seismic region of the structure. Then, the effective stiffness of the system was calculated according to the calculated effective period and mass, and the base shear force was determined in relation to the design earthquake. The base shear force is distributed to the floors depending on the height and weight of the structure. Overturning moments were calculated depending on the seismic forces occurring on the floors and the floor heights. As a result of this process, earthquake shear forces and overturning moments occurring on the floors of the building are calculated. The effectiveness of friction springs, viscous dampers and articulated connections to counter these earthquake effects has been investigated. Firstly, the damping value created by the viscous dampers was calculated depending on the overturning moment, effective period and deformation of the damper. Then, the preload occurring in the friction spring dampers was calculated. The part of the overturning moments to be covered by the friction springs, the selected design relative storey drift and the preload in relation to the friction spring drift were determined. The amount of inter-storey drift resulting from the movement in the friction bearings was determined. After the preload calculation of the friction springs, hysteresis parameters were determined. Then, the axial load deformation values of the HSD structure were estimated. Finally, steel crosses, columns, beams and connection designs were made according to these calculated values.
To demonstrate the effectiveness of the HSRC system, nonlinear analyzes were conducted in the time domain under a series of earthquake data by adapting it to 3-storey and 6-storey buildings. These analyzes were conducted in the OpenSees program. The study results showed that the HSRC system is effective in controlling structural and non-structural damages under the influence of large earthquakes. It has been determined that the HSRC system provides immediate usage levels of 77.3% and 79.8% in 3- and 6-storey buildings, respectively (Hu et al. 2022).
In the light of the literature summarized in this study, it has been revealed that hybrid control systems are obtained by combining different base isolation systems or passive base isolation systems with semi-active and/or active control systems. In some studies, earthquake effects have been countered by the hysterical behavior of rubber-based base insulation systems, that is, their ability to make plastic deformation, and their ability to produce friction forces created by friction systems with variable curvature. In some other studies, hybrid control systems have been proposed in which passive mass dampers are managed by a power supply and control algorithms. To investigate the effectiveness of the proposed hybrid control system, a series of numerical and experimental studies were carried out and compared with active mass damper systems or other semi-active control systems such as MR fluid damper. In this type of studies, optimization studies were carried out by taking into account parameters such as cost, control force produced against earthquakes, reduction of reaction accelerations, relative storey drifts, base shear force and excessive moments. Because how and in what way the proposed hybrid control systems can be adapted to the structure will be determined through optimization studies. By taking into account the principles of earthquake-resistant building design, studies have been carried out to increase the parameters of the building, especially damping, stiffness and strength. A hybrid control system has been designed to increase the damping ratio of the structure with passive systems such as viscous dampers and to increase horizontal rigidity and strength with steel crosses that prevent buckling. However, by taking these parameters into consideration, importance has been given to optimization studies to ensure the earthquake performance expected from buckling-prevented braces or vertical shear panels and viscous or friction dampers. In particular, obtaining force–deformation relations from preliminary experiments or numerical analyzes is an important parameter. Studies have emphasized that in structures exposed to moderate or low level earthquakes, earthquake energy is first dissipated by friction or viscous dampers. However, in case of major earthquakes, the deformation energy of the diagonals and the high rigidity of the vertical shear panels are met. Since the fatigue problems of the panels and diagonals under the influence of vertical loads are compensated by the dampers, it indicates that the hybrid control system created is aimed at complementing each other's deficiencies in two different damping mechanisms. Apart from these, hybrid control systems have been designed by combining MR liquid dampers, which provide damping by creating a magnetic field under the influence of an external power source, and smart materials that exhibit flexible behavior by sensing vibration. Earthquake energies were met as a result of smart materials acting flexibly in the elastic region under the influence of moderate earthquakes. However, against earthquakes with large ground accelerations, control forces produced by external power supply voltage operating MR liquid dampers have been used. It was concluded that the expected earthquake performance target was achieved with a low current of 1A. It is thought that such proposed control systems are designed to keep the structure in the elastic zone during large and medium-sized earthquakes. The basis of the recommended hybrid control systems is that passive control systems such as friction springs and viscous dampers remain in the elastic region during the earthquake and that cross systems flow in order to prevent collapses and relative storey drifts that may occur in the frame system of the building in very large earthquakes. Most studies are based on either limiting the damage level of the load-bearing system under the influence of earthquakes or reducing the response of relative storey drifts, displacements and storey accelerations, without taking into account any ground effects. However, some studies describe hybrid control systems designed taking into account the structure-soil interaction. Whether the ground on which the structure will be placed is tight or loose will significantly change its earthquake performance. In addition, considering this interaction issue, semi-active MR liquid dampers and passive mass dampers were designed together to demonstrate the effectiveness of the hybrid control system against far and near field earthquakes. It is supported by the analysis results that it is reasonable to produce appropriate control forces against near- and far-field earthquakes using fuzzy control algorithms that do not create any mathematical models but eliminate complexity. It is aimed to create appropriate damping energies against earthquake energies by passive mass dampers. It has been defined in the study that optimization is necessary for the applicability of the hybrid control system created by taking into account the structure-soil interaction.
Numerical analyzes were carried out to investigate the effectiveness of the hybrid control system. The dampers that make up the hybrid control system planned to be integrated into the structure were first tested numerically or experimentally and the force–deformation relationships and damper parameters were determined. Then, nonlinear analyzes were carried out in the time domain by modeling the hybrid control systems with the structure in programs such as ETABS, OpenSees and ABAQUS. In numerical analyses, dynamic amplification factor, structural and non-structural damage levels, relative storey drifts, base shear forces, peak displacements and storey accelerations were preferred as parameters. In the structural analyzes carried out in the studies, it was determined that the maximum ground acceleration value was approximately 1 g.
It is concluded from the studies that hybrid control systems should be designed not only for the carrier system but also for the structure-soil interaction. In addition, hybrid control systems need to be established to ensure that the building load-bearing systems remain completely in the elastic zone during the earthquake. It will be possible to use passive base isolation systems with sufficient rigidity, strength and damping to keep the structure in the elastic region. However, it is likely that a power source and control algorithm will be needed for the damping system to work adaptively against a large and unpredictable earthquake. In addition, it is envisaged that it is important to design a hybrid control system that can combine semi-active–passive or active–passive, using optimization logic against structure-soil interaction and far- and near-field earthquakes that will affect the structure. However, it should be noted that using an algorithm that requires the establishment of a complex mathematical model against earthquakes may have some negative consequences. Additionally, power supply interruption may occur under the influence of a major earthquake. In order to overcome these problems, it will be important to use fuzzy logic algorithms that either do not use the control algorithm at all or do not require complex mathematical models. In order for the power supply to continue continuously without interruption, it is envisaged that renewable energy sources that can meet low power requirements such as 1A should be used. It is expected to eliminate this deficiency by utilizing both the damping power of smart materials or nano materials and their ability to meet energy requirements.
In hybrid control systems that are expected to be worked with the envisaged approach, it is necessary to carry out experimental investigations and verify with numerical and analytical studies that earthquake tests such as shaking tables can be applied. In addition, it is thought that it is an important issue that earthquakes with maximum ground acceleration values greater than 1 g affect the structure from distant and near field sources. Again, relevant optimizations need to be made to ensure the expected performance of hybrid control systems. With optimization, it will be determined what size and how the dampers should be placed in the structure. For the expected earthquake performance, the dynamic parameters and force–deformation capabilities of the relevant dampers such as damping, effective mass, effective stiffness and effective period will be determined. It would also be useful to consider the structure-ground interaction with the proposed control algorithm or artificial technology that detects earthquake energy. In future studies, it is expected that numerical and experimental studies of the structures will be carried out with the necessary control algorithms and optimization techniques of hybrid control systems that will be created by taking into account the structure-soil interaction. It is thought that base shear force, top displacements, floor accelerations, control forces, relative floor drifts and damage levels of building elements can be used as parameters to investigate the effectiveness of the hybrid control system in the expected studies.
2.5 Electromagnet Base Isolation Systems
Electromagnet isolator systems are formed by magnets placed at different poles to each other, creating a pushing and pulling force against earthquakes under the influence of an external power source. Here, control force is produced depending on the current passed through the windings of the electromagnets. As the current passed through the coil increases, the control forces produced from the insulators also increase. Apart from this, electromagnetic bearings are also designed against earthquakes. Earthquake effects are counteracted by lifting the structure in a direction opposite to some gravitational acceleration due to the effect of the magnetic field. There are a number of successful studies in the literature on base isolation systems designed using electromagnets.
Costantinescu and Racanel (2017) used the push and pull power of magnets to distribute the earthquake energy that will occur at the highest ground accelerations on bridge decks. However, it was designed as a friction pendulum insulator logic in order to control the friction forces caused by magnets. The logic of this study is based on minimizing the accelerations induced in the bridge deck by increasing the oscillation period of neoprene and friction pendulum insulators. The proposed base isolation system consists of electromagnetic isolators consisting of two electromagnets, high rechargeable batteries that can provide current to the electromagnetic isolators, accelerometers that measure the vibrations on the bridge deck during an earthquake, and a control unit. The thrust force in electromagnets is also an important parameter, as it can lift the bridge deck into the air under the influence of an earthquake. In the study, numerical analyzes were carried out to obtain the magnetic flux densities of five different electromagnets. It has been suggested in this study that electromagnets with high magnetic flux density and permeability coefficient will create more friction energy. Numerical studies were carried out in the COMSOL program based on variable voltage and current values. In this study, Steel50H470 electromagnet was preferred due to its high magnetic properties. A total of 6 bridges with electromagnet base isolation systems were modeled in the ABAQUS program and time history analyzes were applied. Artificial earthquakes with the highest earthquake ground acceleration values of 0.5–2 g were produced and used in the study. The study results showed that the earthquake energy was reduced by 60% as a result of the use of electromagnets at the lower nodes of the bridge deck (Constantinescu and Răcănel 2017). Peng and Huang (2019) proposed low-friction sliding implant magnetic bearings (IMB) to overcome the negative situations such as insufficient balancing force and low damping capacity of traditional sliding insulators. Traditionally, electromagnet base isolation systems (HMB), like adjustable mass dampers, are designed by changing the fluid pressure with a voltage in order to make the friction forces produced against all earthquake intensities effective. Hydromagnetic bearing systems can provide high damping by controlling the friction between the base block and magnets with hydrostatic pressure and by using magnets. In order to investigate the effectiveness of IMBs proposed in this research, comparative numerical and experimental studies with HMBs were conducted. The resistance force in implant magnetic bearings consists of damping force, thrust force and friction force. The thrust force here occurs in the magnetic bearings and the upper block. Damping force is created by the currents occurring in the conductive aluminum under the influence of the load acting on the insulator, causing the relative movement of the permanent magnets relative to each other. Friction force also consists of the movement of the lower and upper layers relative to each other. To investigate the resistance capacity of the IMB, quasi-static loading was performed using the electrohydraulic servo dynamic load system. Loadings were carried out in the ranges of 0.05–0.2 Hz and 20–40 kN. Finite element model and analytical models were established to determine the damping force and resistance forces formed between two magnets. Later, analytical models were developed to calculate the friction forces that will occur in magnetic bearings. Finally, IMBs were implemented in a 6-storey two-degree-of-freedom structure. The study results showed that HMB and IMB have approximately the same ability to reduce seismic effects, but IMBs control earthquake-induced displacements better. It was also revealed that in the largest earthquake ground motion used in the study, the structure had a maximum displacement of 101.69 mm in the absence of a base isolation system, 19.58 mm in the system with IMB and 25.10 mm in the system with HMB. In addition, for systems with IMB, it has been shown in the study results that while the resistance force provides more effective resistance against external loads at low loading frequencies, the damping force is more effective at high frequencies (Peng and Huang 2019). As a similar study, Peng et al. (2019) worked on a hydromagnetic base isolation system (HMB) consisting of a fluid working under the influence of pressure, aluminum base plates, steel pipe and permanent magnets, and capable of sliding. In order to determine the damping force and friction force that constitute the resistance force of HMB insulations, they carried out quasi-static experimental tests as well as analytical studies by creating a finite element model. The study results showed that the friction force made the biggest contribution to the resistance force of HMB. Since the repulsion forces occurring between the magnets are greater than the forces resulting from the displacement of the HMB deposits, they can be extremely effective against major earthquakes that may occur. The fact that the friction coefficient in the sliding isolator is greater than the kinetic friction coefficient is an advantage in terms of the sliding supports being activated when earthquake movements exceed the static friction. It has been found that, especially in the case of high sliding speed and high oil pressure, the friction performance of the sliding hydromagnetic isolator with a lower and more stable friction coefficient is much better than the friction performance observed in existing friction pendulum insulators (Peng et al. 2019). Sun et al. (2020) worked on a negative stiffness (NS) based high static-low stiffness (HSLDS) electromagnetic isolation system consisting of four permanent magnets and four coil windings. The stiffness of the isolation system can be adjusted by currents passed through the coils. If the current passing through the coil is zero, the electromagnetic base isolation system will act as a passive isolation system. The working principle of HSLDS is based on the electromagnetic repulsion force that will occur between the permanent magnets and the coils when current is applied to the coils. Depending on the placement geometry of the permanent magnets, the force that will act only as axial pressure will reduce the rigidity of the insulation system. The equivalent stiffness of the HSLDS insulation system is adjusted according to the current passing through the coils. Additionally, in the study, the dynamic equation and conductivity properties of the insulator were derived and calculated. Both numerical analyzes and experiments carried out in the study showed that this isolator system is more compact, has a heavier load carrying capacity and has higher efficiency (Sun et al. 2020).
Zhang and Zhuan (2020) proposed an active control method based on equivalent stiffness and damping coefficient to improve the electromagnetic isolation system by solving the tuning problem of a PID controller. The electromagnetic force to be produced in order to reduce the vibrations that may occur in the base isolation system is calculated according to the relationship between the coil current, the equivalent stiffness coefficient and the equivalent damping coefficient. In other words, the equivalent stiffness and damping of the electromagnetic isolation system are adjusted according to the current passed through the coil. The structure of the electromagnetic vibration isolation system is formed as shown in Fig. 11, with a spring, two displacement sensors and two electromagnets placed on the spring. When currents of the same size but opposite direction are passed through two electromagnets, electromagnetic repulsion will be generated to reduce vibration and maintain stability for isolation. Since two electromagnets are connected parallel to the spring, the electromagnetic repulsion force and the elastic force of the spring together reduce the vibration. Displacement changes produced by vibration are recorded by two displacement sensors. The displacement values and electromagnetic thrust force were transferred to the plate and applied to the vibration source with equivalent stiffness and damping coefficient to control the currents. The opposite currents to be passed to the coils will be provided by a power source (Zhang and Zuan 2020). The basic approach here is that if an external force acts that may disrupt the stable state of the insulator structure, the electromagnetic force will be produced by controllable currents in order to counter the external force and stabilize the system. Zhang and Zhuan (2020) expressed the magnetic force required to eliminate the external force effect and stabilize the system as in Eq. 7.

Electromagnetic vibration isolation system (Zhang and Zhuan 2020)
Here, y represents the coil winding gap and i represents the current passing through the coil. The dynamic model of the electromagnetic base isolation system is given in Fig. 12 (Zhang and Zhuan 2020).

Dynamic model of the electromagnetic base isolation system (Zhang and Zhuan 2020)
Here, fd represents the earthquake forces, m is the mass of the electromagnets, fe is the magnetic field strength, d1 is the damping coefficient of the system, x(t) is the time-varying insulator displacement, and k1 is the stiffness of the coil spring surrounding the magnets. If the equation is written from the general equation of dynamics,
Here M is the sum of the mass of the electromagnet m and the mass of the insulator m0.\(\ddot{x}\) is the acceleration of the insulator, y is the coil winding gap and i is the current passed through the coil.
L0 is the coil winding length, h0 is the height of the electromagnet and x is the displacement of the isolator. Magnetic force is calculated according to the coil winding gap and the current to be passed through the coil (Zhang and Zhuan 2020).
Tariq et al. (2021) investigated the effect of the magnetorheological elastomer (MRE) layered base isolation system against the vibrations caused by near- and far-field earthquakes in the five-degree-of-freedom structure. This system, adjusted with the linear quadratic regulator (LQR) control algorithm, was compared with passive control systems through a series of simulations. Numerical analyzes performed in the study showed that the MRE system reduces floor accelerations and floor drifts more than passive control systems in all earthquake warnings (PE-2021). Tariq et al. (2021) developed an electromagnetic seismic isolation system (EMSIS) to meet the high power and damping requirements of passive base isolation systems applied in structures exposed to near-field-induced earthquake ground motions. They first developed the mathematical and theoretical formulation of EMSIS. To determine the equivalent damping ratio of this developed electromagnetic seismic isolation system, shaking table experiments were carried out under the influence of near-field earthquakes. EMSIS consists of an electromagnet damper, spring and a series of guide rails. EM damper consists of a DC motor, gearbox and rack and pinion mechanism. For the EM damper, a permanent magnet direct current (DC) motor was used as the rotary EM generator. The theoretical and mathematical results established for EMSIS supported the shaking table experimental results. The study results showed that EMSIS will significantly reduce the displacements and accelerations caused by near-field earthquakes in the isolation system (Tariq et al. 2021).
It has been determined in studies that electromagnetic-based seismic isolators generally resist earthquake effects with the push–pull forces that occur as a result of the interaction between two permanent magnets wrapped in coils. In addition to these forces, the friction force and damping forces formed by the effect of external loading between two magnets can also counteract the earthquake effects. In electromagnetic-based isolation systems, electromagnetic forces are created in parallel with the current passed through the coils surrounding the magnets. Passive isolation systems respond with constant rigidity to any earthquake affecting the structure. In case the characteristics (period, orientation, etc.) of far-field or near-field earthquakes change, the passive isolation system's response with a constant stiffness and damping may disrupt the stability of the structure in some cases. In order to prevent this situation, that is, to enable the isolator to respond to any earthquake by adapting itself with variable stiffness and damping, they used electromagnetic base isolation systems. It is important to adjust the current passing through the coil according to the effect of the earthquake and to produce electromagnetic forces with appropriate stiffness and damping. In addition, large power requirements are required for base isolation systems to operate against some major earthquakes. The use of an electromagnetic base isolation system, which can provide structural stability and damping due to large power requirements, will also be important in this sense. However, the external energy required for large power requirements must be at a sufficient level. While not needing a control algorithm to control the system in electromagnetic isolation systems, which will have changeable stiffness and damping against earthquakes depending on the bubin currents, is an important advantage, operating with large power requirements is a disadvantage. It is thought that it may be necessary to use smart materials with an electromagnetic isolation system that can sense themselves and provide the necessary energy to magnets with any dynamic movement.
Some studies on structural control systems and their shortcomings are summarized in Table 1.
3 Future Works
Structural control systems are systems designed to reduce the effects of earthquakes on the structure. The different dynamic behaviors of both the structures and the earthquakes that will affect the structure have led to the emergence of many control systems. Although the control systems to be applied to buildings have shown successful results in reducing earthquake effects, the emergence of some negative situations in controlling earthquake effects has led researchers to different methods. The main negative situations are that a control system cannot adapt to all near and far field earthquakes, is effective in long or short period structures, needs an external power source and control algorithm to control earthquake effects, and is subject to time delay due to control algorithms. Researchers have resorted to different methods because passive control systems cannot be applied in structures with periods longer than 1 s and are designed only against earthquakes of far or near field origin. In order to adapt the passive control system to any earthquake, isolation systems with variable surface geometric sections that can change and adjust their stiffness against earthquakes were studied. In order to show high damping in the elastic region without reaching long periods, viscous damper crosses, which are prevented from buckling, along with rubber systems, were operated as a passive system to reduce the effects of earthquakes. However, this system was only effective against earthquakes originating from far or near areas. Active control systems have been proposed so that the control system can adapt itself to both near- and far-field earthquakes. The active control system, which works with an active mass damper and a controller, requires a large external power supply to protect the structure against earthquakes. In case of any power outage or the use of an incorrect active mass damper and controller, it is possible that the stability of the structure will be disrupted. Semi-active and hybrid control systems have been proposed to ensure that the control system operates as a passive control system as a result of the external power supply being cut off during the earthquake. In semi-active control systems, in order to produce control forces against earthquakes, external voltages must be produced by a controller managing the system. If the correct controller is not selected, insufficient control forces against earthquakes are expected to occur. If the active power supply is cut off, in hybrid control systems that work like passive base isolation, if complex mathematical models are used, earthquake effects may not be covered. In addition, the time delay that may occur in the controller that manages active, semi-active and hybrid control systems will create many negative situations in reducing the effects of earthquakes.
In this section, future work on passive, active, semi-active, hybrid and electromagnetic based control systems is presented.
3.1 Future Works Related to Passive Control Systems
Based on the review study on passive control systems, it is expected that studies will be conducted to ensure that they can adapt to both near and far field earthquakes. It is also believed that designs can be made to have adjustable stiffness and geometry against any earthquake. Future works in passive control systems are specifically analyzed in the form of sub-sections.
3.1.1 Based on Rubber Base Isolation System
Rubber-based base isolation systems are generally successful in damping earthquakes of near or long field origin at the isolator level. In case of failure of the isolator against either near-field or far-field earthquakes, it is expected that prevented buckling steel braces can be used to prevent the building from losing its horizontal rigidity and vertical stability of the isolator under earthquake effect. It is also thought that these isolators can be supported with viscous braces that can strengthen the damping mechanism against earthquakes. These expected passive control systems should be tested in multi-storey buildings by both numerical analysis in time domain and experimental studies.
3.1.2 Viscous Dampers
In the literature, viscous dampers are usually designed together with steel crosses to form a passive control system. It has been concluded that dampers, which counter earthquake effects with fluid motion, control earthquake effects at significant rates together with steel frames that increase horizontal stiffness, which generally act as structural insurance. It is expected that the damping mechanism of the passive control system will increase significantly if viscous dampers are also used in combination with tie beams formed with steel braces at the outer center. The damping mechanism of the viscous damper with the permanent deformation of the tie beam is expected to be tested with experimental studies such as shaking table in reinforced concrete frame elements.
3.1.3 Friction Damper and Spherical of Surface Based on Isolators
These systems, which dampen the earthquake effect by the friction effect between the spherical surfaces, are generally used together with steel braces. They are designed with variable surfaces in order to provide adjustable stiffness and mass to adapt to any earthquake. These systems, which are designed with variable geometry surfaces to provide adjustable mass and stiffness, are preferred in scaled structures and a series of numerical analyzes and experimental studies can be performed. The experimental studies are considered as cyclic loading, qua-static tests and shake table experiments.
Future works on passive control systems is given in Table 2. Table 2 introduces the passive control type, method and future works.
3.2 Future Works Related to Active Control Systems
It has been concluded that there are studies in the literature on the production of control forces against earthquakes by using active control systems, a control algorithm technique, active mass dampers (AMD), piezoelectric actuators and hydraulic mass dampers (HMD). In active control systems, problems such as stability caused by external energy added to the structure and insufficient control forces caused by time delay must be prevented. Future works on these control systems are defined by dividing them into subsections.
3.2.1 Active Mass Dampers
Active mass dampers are generally used to provide seismic control in multi-storey buildings. These systems, which can produce control force against earthquake effects with a control algorithm and external energy source, have been able to adapt to near and far field earthquakes. However, it is expected that more than one control algorithm technique will be used in order to prevent time delay and deterioration of stability caused by external energy. It is expected that the stability problem can be prevented by correctly calculating the earthquake forces specific to the structure and providing the energy that can produce the appropriate control forces to the AMDs. For this situation, structure-specific earthquake spectra need to be extracted.
3.2.2 Piezoelectric Actuators
Works have been carried out on generating control force against earthquake effects from piezoelectric actuators with the help of a control algorithm and external power energy source, as in AMDs. In the future, control forces are expected to be produced by using both the energy efficiency and damping ability of piezoelectric materials. It is expected that piezoelectric materials will produce electrical energy in response to shape change and that their ability to change shape under the effect of electric field will be used in active seismic control in the future.
3.2.3 Hydraulic Mass Damper
Seismic effects are expected to be controlled more through structure damage diagnosis, which can be done before the use of Hydraulic mass damper, one of the active control systems. It is expected to design a hydraulic mass damper using a damage diagnosis method such as AR-X. It was thought that this way time delay could be avoided.
Future works on active control systems is given in Table 3. Table 3 introduces the active control type, method and future works.
3.3 Future Works Related to Semi-active Control Systems
Earthquake effects can be controlled with semi-active control systems that work with a very small power supply and a control algorithm technique. In the literature, semi-active control systems with MR dampers, piezoelectric-based and tuned mass dampers (TMD) have been developed against seismic effects. Successful results have been obtained by studying semi-active control systems on multi-storey buildings and bridge structures with dynamic-based analysis and experimental studies. However, the use of algorithms that require complex calculations may cause time delay and inadequate seismic control. It is expected that many studies will be carried out in the future to prevent these problems.
3.3.1 MR Dampers
Depending on the magnitude of the current passed through the MR dampers, the stronger the seismic control is. It is expected that algorithm logics that can provide power supply to MR dampers without causing stability problems in the structure and that do not require complex calculations will be used. It is expected that studies will be carried out in the future, especially modeling with artificial neural networks. These studies are expected to be carried out with numerical simulation and real time experiments.
3.3.2 Piezoelectric Semi-active Control Systems
The development of a semi-active control system using closed-loop algorithm logic with piezoelectric materials that have high energy efficiency due to their high polarizability, which can enable higher current to be passed through MR dampers, is expected in future studies. In this way, it is believed that time delay can be avoided by distinguishing it from algorithms that require calculation complexity.
3.3.3 Tuned Mass Damper
According to the conclusions obtained at the end of this review, it is thought that a semi-active control system that can be designed against near- and far-field earthquakes can be developed by using a variable surface pendulum system whose stiffness can be adjusted together with tuned mass dampers. In this case, it is expected that seismic control can be achieved with a less external power source.
Future works on semi active control systems is given in Table 4. Table 4 introduces the semi-active control type, method and future works.
3.4 Future Works Related to Hybrid Control Systems
As a result of the examination, it was obtained that control systems with hybrid logic were developed in order to control the vibrations caused by earthquakes in the structure. Passive control elements were controlled with a piezoelectric actuator so that they could be adapted to any earthquake. Apart from this, hybrid control systems have been designed by using dampers and passive isolators together. Additionally, hybrid control systems have been developed by controlling a passive control system with a semi-active control system. It has been understood that hybrid control systems have an important place in terms of continuing to counter seismic effects with passive control systems in case the power supply to the active and semi-active system is interrupted. It is expected that the application areas of hybrid control systems will be wider in the future. In this section, the expected studies for controlling a passive system with an active system, combining two passive systems, and controlling a passive system with a semi-active control system are defined in subsections.
3.4.1 Controlling the Passive System with Active Control
Designing hybrid control systems to control rubber and friction-based isolators as well as viscous and friction dampers with piezoelectric actuators is a future work. In this way, passive control systems will play an effective role against near- and far-field earthquakes. In such hybrid control systems, piezoelectric materials must work as both a sensor and an actuator. It is expected to design a hybrid control system with suitable highly polarized piezoelectric materials.
3.4.2 Combining Two Passive Control Systems
Hybrid control systems that combine two passive control systems may consist of a combination of rubber-based and friction-based isolators. It can also be designed with a friction damper or viscous damper connected to a steel cross and a passive isolator. In this way, it is expected that by increasing the lateral stiffness of the building system, seismic vibrations that may occur due to far-field earthquakes can be taken under control by increasing the damping properties of near-field earthquakes.
3.4.3 Combining Semi-active Control with Passive Control
Designing a hybrid control system that can control a passive system with MR dampers or TMDs is one of the future works. Controlling passive systems with a semi-active control system that requires less power is an important parameter in terms of both economic and structural behavior. It is thought that this could be an important study in that the semi-active control system works effectively against far-field earthquakes in multi-storey buildings and passive systems provide effective damping mechanisms against near-field earthquakes.
Future works on semi hybrid control systems is given in Table 5. Table 5 introduces the hybrid control type, method and future works.
3.5 Future Works Related to Electromagnetic Control Systems
Electromagnetic isolation systems are based on magnetic lifting of the structure during an earthquake, the repulsive force created by two permanent magnets relative to each other, and the control forces produced depending on the currents passed through the coils wrapped around the electromagnets. Future works on electromagnetic-based isolation systems, which have been the subject of recent successful studies, have been examined in subsections.
3.5.1 Hydromagnetic Bearings
Greater magnetic forces should be produced by adjusting parameters such as the distance between permanent magnets, their thickness and attraction forces. With future optimization studies, the design of hydromagnetic bearings will become more adaptable to earthquakes. It is expected that the tests of electromagnetic bearings will become more widespread with experimental and numerical studies to be carried out in bridge structures and multi-storey buildings.
3.5.2 Electromagnetic coils
Depending on the magnitude of the currents passed through the coils of the electromagnets, the control forces produced against the earthquake will also increase. However, these studies will become more efficient by passing the electrical energy generated by mechanical energy that can be applied to the piezoelectric material without an external energy source, through the ends of the coil. In this case, it is expected that both the energy efficiency of the piezoelectric material and the control forces produced by electromagnets can be utilized.
Future works on electromagnetic control systems is given in Table 6. Table 6 introduces the aelectromagnetic control type, method and future works.
As a result of the findings, an external power source, a suitable controller, a simple mathematical model and no time delay are needed for any structure to adapt itself to any earthquake and reduce seismic effects. In electromagnetic base isolation systems, time delay is prevented thanks to the currents supplied to the coils with an external power source, as well as the use of a control algorithm that does not require a complex calculation model. It should be taken into consideration that although the system works as a passive base isolation system if the external power supply is cut off during an earthquake, it will not be successful in different earthquake characteristics. In order to prevent this situation, it is thought that a smart material that activates the system by generating electrical energy with any dynamic vibration should be a part of the control system. It is expected that an innovative base isolation system can be developed in the coming years by using a smart material that can provide current to the relevant coils by providing the power supply to electromagnetic base isolation systems, which are more compact and have a high load-carrying capacity compared to other passive control systems.
It is thought that in the coming years, many studies can be done with the innovative control system that can be developed by eliminating the external power supply and appropriate control algorithm and therefore the time delay. It is expected that studies will be conducted examining the effectiveness of the innovative control system against earthquakes, taking into account the structure-soil interaction. It is also expected that separate studies may be conducted to determine the effectiveness of the innovative control system in wood, steel, masonry and reinforced concrete building systems. The effectiveness of the innovative control system can also be investigated by producing it in irregular buildings such as torsion, soft floors, weak floors and carrier system discontinuities, which cause buildings to collapse or be severely damaged in earthquakes. Taking the mentioned structure-soil interaction into account, irregular structures can be analyzed both numerically in the time domain and experimental studies in experimental setups with shaking tables and dynamic actuators. Unlike the literature, both experimental and numerical studies can be carried out by using data from earthquakes with earthquake ground accelerations higher than the gravitational acceleration.
4 Conclusions
The most innovative studies on passive, active, semi-active and hybrid control systems developed to protect buildings from earthquake effects are presented in this study. These control systems have generally been effective in reducing seismic effects in buildings. Passive base isolation systems, which can only be designed against near- or far-field earthquakes, cannot be applied especially in structures with a dominant period greater than 1 s. To overcome this problem, in addition to the rubber system, another passive control element, buckling-prevented viscous damper crosses, was used to provide high damping in short periods. In order for passive control systems to adapt to any earthquake, variability has been created in the stiffness and damping characteristics. This interchangeability is achieved with spherical or pendulum insulators with variable surface geometry. Active control systems generally consist of an active mass damper and a control algorithm. It has been determined through studies that a power supply successfully reduces seismic effects by energizing an active mass damper by adapting itself with a control controller against near- and far-field earthquakes. However, a control controller that may disrupt the stability of the active system should not be used and at the same time the power supply should not be cut off. To overcome this problem, active systems that require less power and work with a closed loop controller that do not require a complex calculation model have been designed. These active systems were integrated with viscous dampers and operated. In this case, even in the event of a power outage, the system continued to reduce seismic effects by working as a passive control system. Semi-active control systems are created by using MR liquid dampers and a control controller. MR liquid dampers work with a very small power supply effect and produce control forces against earthquake forces with the guidance of the control controller. Time delay problems are experienced in semi-active control systems, which have achieved successful results in reducing seismic effects. Due to time delay, it may be possible to not be able to intervene against seismic effects at the desired time. To eliminate the time delay problem, different controllers such as fuzzy logic controllers have been used. Hybrid control systems appear as a technique that uses active control systems and passive control systems together. Seismic effects were successfully reduced by operating the active system with an external power source by a control controller. Studies have shown the use of control controllers that do not require complex calculation models to overcome problems such as time delay and system instability. Electromagnetic base isolation systems, which generally do not use a control controller and are compact and have high load-carrying capacity, have been proposed. Electromagnetic systems can adapt themselves to any earthquake by designing the stiffness and damping coefficients at a changeable level. Electromagnetic forces can be produced against the effects of earthquakes thanks to the current given to coils wrapped around permanent magnets by an external power source.
Data Availability
No datasets were generated or analysed during the current study.
References
Adeli H, Kim H (2022) Wavelet-based vibration control of smart buildings and bridges. CRC Press, Boca Raton, pp 173–189
Alhan C, Şahin F (2011) Protecting vibration-sensitive contents: an investigation of floor accelerations in seismically isolated buildings. Bull Earthq Eng 9:1203–1226. https://doi.org/10.1007/s10518-010-9236-0
ASCE 31 and 41. https://doi.org/10.1061/ASCE3141
Azimi M, Rasoulnia A, Lin Z, Pan H (2017) Improved semi-active control algorithm for hydraulic damper-based braced buildings. Struct Control Heal Monit. https://doi.org/10.1002/stc.1991
Bakhshinezhad S, Mohebbi M (2020) Multi-objective optimal design of semi-active fluid viscous dampers for nonlinear structures using NSGA-II. Structures 24:678–689. https://doi.org/10.1016/j.istruc.2020.02.004
Bathaei A, Zahrai SM (2022a) Improving semi-active vibration control of an 11-story structure with non-linear behavior and floating fuzzy logic algorithm. Structures 39:132–146. https://doi.org/10.1016/j.istruc.2022.03.022
Bathaei A, Zahrai SM (2022b) Compensating time delay in semi-active control of a SDOF structure with MR damper using predictive control. Struct Eng Mech 82:445–458. https://doi.org/10.12989/sem.2022.82.4.445
Brodersen ML, Ou G, Høgsberg J, Dyke S (2016) Analysis of hybrid viscous damper by real time hybrid simulations. Eng Struct 126:675–688. https://doi.org/10.1016/j.engstruct.2016.08.020
Casciati S, Chen Z (2012) An active mass damper system for structural control using real-time wireless sensors. Struct Control Heal Monit 19:758–767. https://doi.org/10.1002/stc.1485
Casciati F, Rodellar J, Yildirim U (2012) Active and semi-active control of structures-theory and applications: a review of recent advances. J Intell Mater Syst Struct 23:1181–1195
Castaldo P, De Iuliis M (2014) Optimal integrated seismic design of structural and viscoelastic bracing-damper systems. Earthq Eng Struct Dyn 43:1809–1827. https://doi.org/10.1002/eqe.2425
Constantinescu SA, Răcănel IR (2017) Seismic isolation of bridges using the principle of electromagnetic attraction and repulsion. Rom J Transp Infrastruct 6:1–14. https://doi.org/10.1515/rjti-2017-0050
Datta TK (2010) Seismic analysis of structures. Wiley, Hoboken
Ding Y, Weng F, Tang M, Ge J (2015) Active vibration-attenuation controller design for uncertain structural systems with input time-delay. Earthq Eng Eng Vib 14:477–486. https://doi.org/10.1007/s11803-015-0038-x
Du B, Zhao X, Li H (2020) Multiperformance optimization design of a hybrid vibration mitigation system for super high-rise buildings to improve earthquake resistance. Struct Des Tall Spec Build. https://doi.org/10.1002/tal.1709
Engle T, Mahmoud H, Chulahwat A (2015) Hybrid tuned mass damper and isolation floor slab system optimized for vibration control. J Earthq Eng 19:1197–1221. https://doi.org/10.1080/13632469.2015.1037406
FEMA 273 NEHRP guidelines for the seismic rehabilitation of https://www.yumpu.com/en/document/view/51689942/fema-273-nehrp-guidelines-for-the-seismic-rehabilitation-of-. Accessed 17 on Sep 2022
Fu G, Quan Y, Gu M et al (2022) Dynamic performance evaluation of a 492 m super high-rise building with active tuned mass dampers during four consecutive landfall typhoons within a month. J Build Eng. https://doi.org/10.1016/j.jobe.2022.105259
Gaul L, Nitsche R (2001) The role of friction in mechanical joints. Appl Mech Rev 54:93–106. https://doi.org/10.1115/1.3097294
Gutierrez Soto M, Adeli H (2019) Semi-active vibration control of smart isolated highway bridge structures using replicator dynamics. Eng Struct 186:536–552. https://doi.org/10.1016/j.engstruct.2019.02.031
Hosseini SA, Jhangiri V, Massumi A (2023) Vibration control of steel frames with setback irregularities equipped with semi-active tuned mass dampers. J Constr Steel Res. https://doi.org/10.1016/j.jcsr.2023.108222
Hosseini Lavassani SH, Shangapour S (2022) Interval type-2 fuzzy hybrid control of a high-rise building including soil-structure interaction under near-field and far-field ground motions. Struct Eng Int 32:316–327. https://doi.org/10.1080/10168664.2020.1838249
Housner GW, Bergman LA, Caughey TK et al (1997) Structural control: past, present, and future. J Eng Mech. https://doi.org/10.1061/(asce)0733-9399(1997)123:9(897)
Hu S, Wang W, Shahria Alam M (2022) Hybrid self-centering rocking core system with fiction spring and viscous dampers for seismic resilience. Eng Struct. https://doi.org/10.1016/j.engstruct.2022.114102
Ikeda Y (2016) An active mass damper designed using ARX models of a building structure. Earthq Eng Struct Dyn 45:2185–2205. https://doi.org/10.1002/eqe.2754
Jalali HH, Farzam FM, Gavgani SAM, Bekdaş G (2023) Semi-active control of buildings using different control algorithms considering SSI. J Build Eng. https://doi.org/10.1016/j.jobe.2023.105956
Jangid RS, Kelly JM (2001) Base isolation for near-fault motions. Earthq Eng Struct Dyn 30:691–707. https://doi.org/10.1002/eqe.31
Javadinasab Hormozabad S, Ghorbani-Tanha AK (2020) Semi-active fuzzy control of lali cable-stayed bridge using MR dampers under seismic excitation. Front Struct Civ Eng 14:706–721. https://doi.org/10.1007/s11709-020-0612-9
Jia S, Liu Y, Cao W et al (2016) Experimental study on the force-bearing performance of masonry structures with a marble-graphite slide seismic isolator at the foundation. Appl Sci. https://doi.org/10.3390/app6110345
Johnson EA, Ramallo JC, Spencer BF, Sain MK (1998) Intelligent base ısolation systems. In: Second world conference on structural control, pp 1–10
Jung HJ, Spencer BF, Ni YQ, Lee IW (2004) State-of-the-art of semiactive control systems using MR fluid dampers in civil engineering applications. Struct Eng Mech 17:493–526
Kikuchi M, Black CJ, Aiken ID (2008) On the response of yielding seismically isolated structures. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.777
Kitayama S, Constantinou MC (2019) Probabilistic seismic performance assessment of seismically isolated buildings designed by the procedures of ASCE/SEI 7 and other enhanced criteria. Eng Struct. https://doi.org/10.1016/j.engstruct.2018.11.014
Krishnamoorthy A, Bhat S, Bhasari D (2017) Radial basis function neural network algorithm for semi-active control of base-isolated structures. Struct Control Heal Monit. https://doi.org/10.1002/stc.1984
Li C, Cao B (2015) Hybrid active tuned mass dampers for structures under the ground acceleration. Struct Control Heal Monit 22:757–773. https://doi.org/10.1002/stc.1716
Lu LY, Lee TY, Yeh SW (2011) Theory and experimental study for sliding isolators with variable curvature. Earthq Eng Struct Dyn 40:1609–1627. https://doi.org/10.1002/eqe.1106
Markou AA, Stefanou G, Manolis GD (2017) Stochastic response of nonlinear base isolation systems. In: COMPDYN 2017—Proceedings of the 6th ınternational conference on computational methods in structural dynamics and earthquake engineering, pp 4726–4739
Marshall JD, Charney FA (2012) Seismic response of steel frame structures with hybrid passive control systems. Earthq Eng Struct Dyn 41:715–733. https://doi.org/10.1002/eqe.1153
Mehrparvar B, Khoshnoudian T (2012) Performance-based semi-active control algorithm for protecting base isolated buildings from near-fault earthquakes. Earthq Eng Eng Vib 11:43–55. https://doi.org/10.1007/s11803-012-0097-1
Miyamoto K, She J, Imani J et al (2016) Equivalent-input-disturbance approach to active structural control for seismically excited buildings. Eng Struct 125:392–399. https://doi.org/10.1016/j.engstruct.2016.07.028
Nestovito G, Occhiuzzi A (2016) Implementation of smart-passive dampers combined with double concave friction pendulum devices to retrofit an existing highway viaduct exploiting the seismic early warning information. Eng Struct 120:58–74. https://doi.org/10.1016/j.engstruct.2016.04.026
Ogata K (2009) Modern control engineering, 5th edn. CRC Press, Boca Raton
Oliveto ND, Scalia G, Oliveto G (2010) Time domain identification of hybrid base isolation systems using free vibration tests. Earthq Eng Struct Dyn 39:1015–1038. https://doi.org/10.1002/eqe.984
Ordonez D, Foti D, Bozzo L (2003) Comparative study of the inelastic response of base isolated buildings. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.224
Pan P, Zamfirescu D, Nakashima M et al (2005) Base-isolation design practice in japan: Introduction to the post-kobe approach. J Earthq Eng 9:147–171. https://doi.org/10.1080/13632460509350537
Pardo-Varela J, de la Llera JC (2015) A semi-active piezoelectric friction damper. Earthq Eng Struct Dyn 44:333–354. https://doi.org/10.1002/eqe.2469
Park W, Park KS (2019) Optimal design of hybrid control system for the wind and earthquake excited buildings. KSCE J Civ Eng 23:744–753. https://doi.org/10.1007/s12205-018-0813-0
Peng Y, Huang T (2019) Sliding implant-magnetic bearing for adaptive seismic mitigation of base-isolated structures. Struct Control Heal Monit. https://doi.org/10.1002/stc.2431
Peng Y, Ding L, Chen J, Villaverde R (2019) Experimental study of sliding hydromagnetic ısolators for seismic protection. J Struct Eng. https://doi.org/10.1061/(asce)st.1943-541x.0002300
Qiu J, Ji H, Zhu K (2009) Semi-active vibration control using piezoelectric actuators in smart structures. Front Mech Eng China 4:242–251
Rawlinson TA, Marshall JD, Ryan KL, Zargar H (2015) Development and experimental evaluation of a passive gap damper device to prevent pounding in base-isolated structures. Earthq Eng Struct Dyn 44:1661–1675. https://doi.org/10.1002/eqe.2542
Rebecchi G, Calvi PM, Bussini A et al (2022) Full-scale shake table tests of a reinforced concrete building equipped with a novel servo-hydraulic active mass damper. J Earthq Eng. https://doi.org/10.1080/13632469.2022.2121338
Rodríguez A, Pozo F, Bahar A et al (2012) Force-derivative feedback semi-active control of base-isolated buildings using large-scale MR fluid dampers. Struct Control Heal Monit 19:120–145. https://doi.org/10.1002/stc.430
Rogacheva N (2019) Active vibration suppression of a beam using piezoeffect. In: E3S web of conferences
Roy T, Matsagar V (2019) Effectiveness of passive response control devices in buildings under earthquake and wind during design life. Struct Infrastruct Eng 15:252–268. https://doi.org/10.1080/15732479.2018.1547768
Ruzicka JE (1968) Active vibration and shock isolation. In: SAE technical papers
Saeed MU, Sun Z, Elias S (2022) Semi-active vibration control of building structure by self tuned brain emotional learning based ıntelligent controller. J Build Eng. https://doi.org/10.1016/j.jobe.2021.103664
Salari S, Javadinasab Hormozabad S, Ghorbani-Tanha AK, Rahimian M (2019) Innovative mobile TMD system for semi-active vibration control of inclined sagged cables. KSCE J Civ Eng 23:641–653. https://doi.org/10.1007/s12205-018-0161-0
Schoeftner J, Brandl A, Irschik H (2019) Control of stress and damage in structures by piezoelectric actuation: 1D theory and monofrequent experimental validation. Struct Control Heal Monit 26:e2338
Selim BA, Liu Z, Liew KM (2019) Active vibration control of functionally graded graphene nanoplatelets reinforced composite plates integrated with piezoelectric layers. Thin-Walled Struct. https://doi.org/10.1016/j.tws.2019.106372
Shi Y, Becker TC, Kurata M, Nakashima M (2013) H∞ control in the frequency domain for a semi-active floor isolation system. Front Struct Civ Eng 7:264–275. https://doi.org/10.1007/s11709-013-0214-x
Shuang Z, Wenliuhan H, Liu Y, Zhai Z (2024) Seismic response control for bridge piers with semi-active MR damper based on displacement feedback. J Earthq Eng 28(3):849–865. https://doi.org/10.1080/13632469.2023.2220419
Sun Y, Zhao J, Wang M et al (2020) High-static-low-dynamic stiffness isolator with tunable electromagnetic mechanism. IEEE/ASME Trans Mech 25:316–326. https://doi.org/10.1109/TMECH.2019.2954910
Symans MD, Constantinou MC (1999) Semi-active control systems for seismic protection of structures: a state-of-the-art review. Eng Struct 21:469–487. https://doi.org/10.1016/S0141-0296(97)00225-3
Tang X, Zuo L (2011) Simulation and experiment validation of simultaneous vibration control and energy harvesting from buildings using tuned mass dampers. In: Proceedings of the American control conference, pp 3134–3139
Tariq MA, Usman M, Farooq SH et al (2021) Investigation of the structural response of the mre-based mdof isolated structure under historic near- and far-fault earthquake loadings. Appl Sci. https://doi.org/10.3390/app11062876
Thenozhi S, Yu W (2014) Stability analysis of active vibration control of building structures using PD/PID control. Eng Struct 81:208–218. https://doi.org/10.1016/j.engstruct.2014.09.042
Tso MH, Yuan J, Wong WO (2013) Design and experimental study of a hybrid vibration absorber for global vibration control. Eng Struct 56:1058–1069. https://doi.org/10.1016/j.engstruct.2013.06.017
Vassiliou MF, Tsiavos A, Stojadinović B (2013) Dynamics of inelastic base-isolated structures subjected to analytical pulse ground motions. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.2311
Venanzi I, Ierimonti L, Materazzi AL (2020) Active base isolation of museum artifacts under seismic excitation. J Earthq Eng 24:506–527. https://doi.org/10.1080/13632469.2018.1453410
Vrabie D, Vamvoudakis KG, Lewis FL (2012) Optimal adaptive control and differential games by reinforcement learning principles. Institution of Engineering and Technology, Lodon
Wang KW, Kim YS (1991) Semi-active vibration control of structures via variable damping elements. Mech Syst Signal Process. https://doi.org/10.1016/0888-3270(91)90007-R
Wang LW, Lu LY (2018) Generic 3D formulation for sliding isolators with variable curvature and its experimental verification. Eng Struct 177:12–29. https://doi.org/10.1016/j.engstruct.2018.09.038
Wang S, Chen Z, Jiao Y, Liu X (2017) Active vibration isolation using a six-axis orthogonal vibration isolation platform with piezoelectric actuators. J Vibroeng 19:6105–6121. https://doi.org/10.21595/jve.2017.19014
Wang T, Zhang X, Li K, Yang S (2021) Mechanical performance analysis of a piezoelectric ceramic friction damper and research of its semi-active control strategy. Structures. https://doi.org/10.1016/j.istruc.2021.04.100
Wang L, Zhou Y, Nagarajaiah S, Weixing S (2023) Bi-directional semi-active tuned mass damper for torsional asymmetric structural seismic response control. Eng Struct. https://doi.org/10.1016/j.engstruct.2023.116744
Warn GP, Ryan KL (2012) A review of seismic isolation for buildings: historical development and research needs. Buildings 2:300–325
Zare Golmoghany M, Zahrai SM (2021) Improving seismic behavior using a hybrid control system of friction damper and vertical shear panel in series. Structures 31:369–379. https://doi.org/10.1016/j.istruc.2021.02.007
Zareie S, Issa AS, Seethaler R et al (2021) A novel SMA-magnetorheological hybrid bracing system for seismic control. Eng Struct. https://doi.org/10.1016/j.engstruct.2021.112709
Zhang L, Zhuan X (2020) Active control method based on equivalent stiffness and damping coefficient for an electromagnetic isolation system. Appl Sci. https://doi.org/10.3390/app10227953
Zhou Y, Chen P, Mosqueda G (2022) Numerical studies of three-dimensional isolated structures with vertical quasi-zero stiffness property. J Earthq Eng 26:3601–3622. https://doi.org/10.1080/13632469.2020.1813662
Zhu W, Rui XT (2014) Semiactive vibration control using a magnetorheological damper and a magnetorheological elastomer based on the bouc-wen model. Shock Vib. https://doi.org/10.1155/2014/405421
Zizouni K, Saidi A, Fali L, Bousserhane IK, Djarmane M (2023) Semi-active structural vibrations control with magneto-rheologi-cal damper based on the hybrid fuzzy sliding mode controller. J Constr 22(1):36–50. https://doi.org/10.7764/RDLC.22.1.36
Acknowledgements
The work is part of the Ataturk University Project No: FBG-2022-11620.The authors would like to thank to Ataturk University for funding the project.
Author information
Authors and Affiliations
Contributions
There are two authors in the research. One of the authors, Prof. Dr. Abdulkadir Cüneyt Aydın thought of an innovative idea and enabled us to work in the field of structural control. The subject and scope section of the research was prepared by Prof. Dr. It belongs to Abdulkadir Cüneyt Aydın. The other author is Dr. Oğuzhan Çelebi contributed to the writing of the review article by conducting a literature review.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Conflict of interest
Conflict of interest on behalf of all authors, the corresponding author states that there is no conflict of interest.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Çelebi, O., Aydın, A.C. A review on the Control Systems Developed for Earthquake Controlled Structures. Iran J Sci Technol Trans Civ Eng (2024). https://doi.org/10.1007/s40996-024-01514-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40996-024-01514-6