
Abstract
The Derivative-free nonlinear Kalman Filter is used for developing a robust controller which can be applied to quadcopters. The control problem for quadcopters is non-trivial and becomes further complicated if this robotic system is subjected to model uncertainties and external disturbances. Using differential flatness theory it is shown that the model of a quadcopter can be transformed to linear canonical form. For the linearized equivalent of the quadcopter it is shown that a state feedback controller can be designed. Since certain elements of the state vector of the linearized system can not be measured directly, it is proposed to estimate them with the use of a novel filtering method, the so-called Derivative-free nonlinear Kalman Filter. Moreover, by redesigning the Kalman Filter as a disturbance observer, it is is shown that one can estimate simultaneously external disturbance terms that affect the quadcopter or disturbance terms which are associated with parametric uncertainty. The efficiency of the proposed control scheme is checked through simulation experiments.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Quadrotors are four-rotor helicopters characterized by a nonlinear 6-DOF unstable dynamical model. To succeed autonomous navigation of the quadrotors it is necessary to design efficient control algorithms that will exhibit robustness to parametric uncertainties and to external disturbances. One can cite several results on quadrotors’ control. An approach for quadrotors’ control that is based on the transformation of their dynamical model in the linear canonical form and which is consequently directly associated with differential flatness theory has been given in [1]. Moreover, in [2] a flatness-based control approach is applied to quadrotors’ motion control. A predictive controller complemented by an \(H_{\infty }\) term for additional robustness has been analyzed and tested in the quadrotor’s flight control problem in [3, 4]. In [5] motion control of the quadrotor was implemented using controllers of the LQR-type and of the PID-type, while Kalman Filtering has been used to provide position estimates out of a visual measurements system. In [6] two control strategies are employed as baseline controllers for the quadrotor’s model: a LQR controller which is based on a linearized model of the quadrotor and a Sliding Mode Controller which is based on a nonlinear model of the quadrotor. Moreover, differential flatness theory has been used for trajectory planning. In [7] and in [8] adaptive control schemes have been proposed for the quadrotor’s model. The stability of the control loop is confirmed through the Lyapunov approach. In [9] quadrotor’s control with the use of a sliding-mode controller and a sliding-mode disturbance observer has been proposed.
In this paper a new control method is developed for quadrotors that is based on differential flatness theory together with the use of a disturbance observer that is also in accordance to differential flatness theory, the so-called Derivative-free nonlinear Kalman Filter. The differential flatness theory-based design of the controller uses a change of coordinates (diffeomorhism) that transforms the state-space equation of the quadrotor’s model into the linear canonical (Brunovsky) form [10–15]. For the linearized equivalent of the quadrotor it is easier to design a state feedback controller using techniques for linear feedback controllers’ synthesis. To provide the quadrotor’s control loop with additional robustness a disturbance observer is used. The disturbance observer applies the standard Kalman Filter recursion on the linearized model of the quadrotor. It is capable of estimating simultaneously the quadrotor’s linear and rotational velocities, as well as the vector of disturbances that affect the quadrotor’s model without the need to compute Jacobian matrices (derivative-free nonlinear Kalman Filter). The accurate estimation of the disturbance inputs enables to introduce an additional control term that compensates for the disturbances’ effects. The accurate tracking of reference trajectories that is performed by the quadrotor despite the existence of external disturbances is shown in simulation experiments.
Differential flatness theory has specific advantages when used in nonlinear control systems [10–15]. By enabling an exact linearization of the system’s dynamical model it makes possible to avoid the use of linear models of local validity in the controller’s design. The controller performs efficiently despite the change of operating points. After the design of such a state feedback controller, one can consider the inclusion in the control loop of supplementary control terms that will provide additional robustness. Thus one can design flatness-based adaptive fuzzy controllers or flatness-based sliding-mode controllers. As mentioned above, it is also possible to use a disturbance estimator-based auxiliary control input for compensating for the effects of disturbances in the feedback control loop. Moreover, the use of differential flatness theory in the design of state estimators and filters has also several strong points. One can perform estimation of the complete state vector of the system without the need to compute partial derivatives and Jacobian matrices. Moreover, by avoiding numerical errors which are due to approximate linearization of the system’s dynamic model (e.g. with the use of expansion in Taylor series) linear estimation algorithms can be implemented. In the case of Kalman Filter this means that one can perform state estimation with the use of the standard Kalman Filter recursion, thus preserving the method’s optimality features and providing state estimates of improved precision (e.g. comparing to Extended Kalman Filtering).
The structure of the paper is as follows: in “Kinematic of the Quadcopter” section the kinematic model of the quadrotor is analyzed. In “Euler-Lagrange-equations for the Quadrotor” section the dynamic model of the quadrotor is introduced, using the Euler-Lagrange approach. In “Differential Flatness Theory MIMO Systems”section, differential flatness theory for MIMO dynamical systems is analyzed and conditions for the transformation of such systems into the linear canonical form are provided. It is shown how one can design a state feedback controller for the linearized equivalent of the system and how a derivative-free implementation of nonlinear Kalman filtering can provide state estimation for the quadrotor’s model. In “Design of Flatness Based Controller for the Quadrotors Model”section, the design of a flatness-based controller for the quadrotor’s model is explained. In “Disturbances Estimation in Quadrotor with Kalman Filtering”section it is shown how one can perform estimation of disturbance forces exerted on the quadrotor’s model using a disturbance observer. The derivative-free nonlinear Kalman Filter is re-designed as a disturbance estimator, thus providing simultaneously estimations of the quadrotor’s velocities and of the external disturbance terms. In“Simulation Tests” experimental tests are performed to evaluate the performance of the proposed control scheme, based on differential flatness theory and the derivative-free nonlinear Kalman Filter. Finally, in “Conclusions” section concluding remarks are given.
Kinematic Model of the Quadcopter
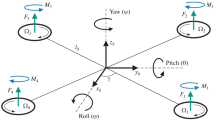
Two reference frames are defined [3, 4]. The first one \(B=[B_1,B_2,B_3]\) is attached to the quadcopter’s body, whereas the second \(E=[E_x,E_y,E_z]\) is considered to be an inertial coordinates system (Fig. 1). The Euler angles defining rotation round the axes of the body-fixed frame \(B_1\), \(B_2\) and \(B_3\) are defined as \(\theta \), \(\phi \) and \(\psi \), respectively. The two reference frames are connected to each other through a rotation matrix:
where \(C=cos(\cdot )\) and \(S=sin(\cdot )\).

Reference axes for the quadcopter
The connection between velocities in the two reference frames is as follows:
where \(V_E=[u_E,v_E,w_E]\) and \(V_B=[u_B,v_B,w_B]\) are the linear velocity vectors expressed in the two reference frames. About the angular velocities in the two reference frames the following relation holds
that is
where \(\eta =[\phi ,\theta ,\psi ]^T\) is the angular velocities vector in the inertial reference frame and \(\omega =[p,q,r]^T\) is the angular velocities vector in the body-fixed reference frame.
Euler-Lagrange Equations for the Quadcopter
The Euler-Lagrange equation for the quadcopter is formulated as follows
where the Lagrangian is defined as \(L(q,\dot{q})=E_{C_{trans}}+E_{C_{rot}}-E_p\), \(E_{C_{trans}}\) is the kinetic energy of the quadrotor due to translational motion, \(E_{C_{rot}}\) is the kinetic energy of the quadrotor due to rotational motion and \(E_p\) is the total potential energy of the quadrotor due to lift. The generalized state vector is \(q=[\xi ^T,\eta ^T]^T{\in }{R^6}\), \({\tau _\eta }{\in }{R^3}\) is the torques vector that causes rotation round the axes of the body-fixed reference frame, and \(f_{\xi }=R\hat{f}+\alpha _T\) is the translational force applied to the quadcopter due to the main control input \(U_1\) along the z-axis direction, while \(\alpha _T=[A_x,A_y,A_z]^T\) are the aerodynamic forces vector, defined along the axes of the inertial reference frame. Since the Lagrangian does not contain cross-coupling between the \(\dot{\xi }\) and the \(\dot{\eta }\) terms, the Lagrange-Euler equations can be divided into translational and rotational dynamics.
The translational dynamics of the quadcopter is given by
where \(e_3=[0,0,1]^T\) is the unit vector along the z axis of the inertial reference frame. Eq. (6) can be written using the following three equations
where m is the quadcopter’s mass and g is the gravitational acceleration.
The rotational dynamics of the quadcopter is given by
where the inertia matrix \(M(\eta )\) is defined as
and the Coriolis matrix is
where the elements of the matrix are
Thus, the mathematical model that describes the quadrotor’s rotational motion is given by
Denoting \(w={M(\eta )^{-1}}(\tau _\eta -C(\eta ,\dot{\eta })\dot{\eta })\), one has the following notation for the rotational dynamics
Considering small variations of the heading angle of the quadrotor round \(\psi ={\pi \over 2}\), denoting \(w_1=U_1/m\) and taking also that the aerodynamic coefficients \(A_x,A_y,A_z<<m\), a simplified quadropter’s model is formulated as follows [1]
Differential Flatness Theory for MIMO Dynamical Systems
Basics of Differential Flatness Theory
Differential flatness theory will be used in the design of the quadrotor’s controller. Differential flatness theory can be applied to the generic class of systems \(\dot{x}=f(x,u)\). In this study, the interest is in dynamic models of the form
The principles of the differential flatness theory have been extensively studied in the relevant bibliography [11, 12, 19]: A finite dimensional system is considered. This can be written in the form of an ordinary differential equation (ODE), i.e. \(S_i(w,\dot{w},\ddot{w},\ldots ,w^{(i)}), \ \ i=1,2,\cdots ,q\). The term w denotes the system variables (these variables are for instance the elements of the system’s state vector and the control input) while \(w^{(i)}\), \(i=1,2,\ldots ,q\) are the associated derivatives. Such a system is said to be differentially flat if there exists a set of m functions \(y=(y_1,\ldots ,y_m)\) of the system variables and of their time-derivatives, i.e. \(y_i=\phi (w,\dot{w},\ddot{w},\ldots ,w^{(\alpha _i)}), \ i=1,\ldots ,m\) satisfying the following two conditions [10, 20]:
-
1.
There does not exist any differential relation of the form \(R(y,\dot{y},\ldots ,y^{(\beta )})=0\) which implies that the derivatives of the flat output are not coupled in the sense of an ODE, or equivalently it can be said that the flat output is differentially independent.
-
2.
All system variables (i.e. the elements of the system’s state vector w and the control input) can be expressed using only the flat output y and its time derivatives \(w_i={\psi _i}(y,\dot{y},\ldots ,y^{(\gamma _i)}), \ i=1,\ldots ,s \). An equivalent definition of differentially flat systems is as follows:
Definition
The system \(\dot{x}=f(x,u)\), \(x{\in }{R^n}\), \(u{\in }{R^m}\) is differentially flat if there exist relations
such that
This means that all system dynamics can be expressed as a function of the flat output and its derivatives, therefore the state vector and the control input can be written as
Classes of Differentially Flat Systems
For certain classes of dynamical systems it has been proven that they satisfy differential flatness properties. The following classes of nonlinear differentially flat systems are defined [14]:
-
1.
Affine in-the-input systems: The dynamics of such systems is given by:
$$\begin{aligned} \dot{x}=f(x)+{\sum _{i=1}^m}{g_i(x)}{u_i} \end{aligned}$$(19)From Eq. (19) it can be seen that the above state equation can also describe MIMO dynamical systems. Without out loss of generality it is assumed that \(G=[g_1,\ldots ,g_m]\) is of rank m. In case that the flat outputs of the aforementioned system are only functions of states x, then this class of dynamical systems is called 0-flat. It has been proven that a dynamical affine system with n states and \(n-1\) inputs is 0-flat if it is controllable.
-
2.
Driftless systems: These are systems of the form
$$\begin{aligned} \dot{x}={\sum _{i=1}^m}{f_i(x)}u_i \end{aligned}$$(20)
For driftless systems with two inputs, i.e.
the flatness property holds, if and only if the rank of matrix \(E_{k+1}:=\{E_k,[E_k,E_k]\}, \ k{\ge }0\) with \(E_0:=\{f_1,f_2\}\) is equal to \(k+2\) for \(k=0,\ldots ,n-2\). It has been proven that a driftless system that is differentially flat, is also 0-flat.
Moreover, for flat systems with n states and \(n-2\) control inputs, i.e.
the flatness property holds, if controllability also holds. Furthermore, the system is 0-flat if n is even.
Conditions for Applying the Differential Flatness Theory to MIMO Systems
Application of the differential flatness theory to multi-input multi-output systems is of particular importance for the UAVs, such as quadrotors, because the latter stand also for MIMO systems. In order to demonstrate that a MIMO system satisfies the differential flatness properties, the flat outputs of the system have to be defined first. For nonlinear systems it is still an open problem to construct flat outputs. The following generic class of nonlinear systems is considered
Such a system can be transformed to the form of an affine in the input system by adding an integrator to each input [15]
The following definitions are used [15–18]:
-
(i)
Lie Derivative: \({L_f}h(x)\) stands for the Lie derivative \({L_f}h(x)=({\nabla }h)f\) and the repeated Lie derivatives are recursively defined as \({L_f^0}h=h \ \ \text {for} \ i=0\), \({L_f^i}h={L_f}{{L_f^{i-1}}h}=\nabla {L_f^{i-1}h}f \ \ \text {for} \ i=1,2,\ldots \).
-
(ii)
Lie Bracket: \({ad_f^i}g\) stands for a Lie Bracket which is defined recursively as \({ad_f^i}g=[f,{ad_f^{i-1}}g]\) with \({ad_f^0}g=g\) and \({ad_f}g=[f,g]={{\nabla }g}f-{{\nabla }f}g\).
If the system of Eq. (24) can be linearized by a diffeomorphism \(z=\phi (x)\) and a static state feedback \(u=\alpha (x)+\beta (x)v\) into the following form
with \({\sum _{j=1}^m}{v_j}=n\), then \(y_j=z_{1,j}\) for \(1{\le }j{\le }m\) are the 0-flat outputs which can be written as functions of only the elements of the state vector x. To define conditions for transforming the system of Eq. (24) into the canonical form described in Eq. (25) the following theorem holds [15]
Theorem
For the nonlinear systems described by Eq. (24) the following variables are defined:
-
(i)
\(G_0=\text {span}[g_1,\ldots ,g_m]\).
-
(ii)
\(G_1=\text {span}[g_1,\ldots ,g_m,ad_f{g_1},\ldots ,ad_f{g_m}]\).
\(\cdots \)
-
(k)
\(G_k=\text {span}\{{ad_f^j}{g_i} \ \text {for} \ 0{\le }j{\le }k, \ 1{\le }i{\le }m \}\).
Then, the linearization problem for the system of Eq. (24) can be solved if and only if
-
(1)
The dimension of \(G_i, \ i=1,\ldots ,k\) is constant for \(x{\in }X{\subseteq }R^n\) and for \(1{\le }i{\le }n-1\)
-
(2)
The dimension of \(G_{n-1}\) if of order n.
-
(3)
The distribution \(G_k\) is involutive for each \(1{\le }k{\le }{n-2}\).
Transformation of MIMO Nonlinear Systems into the Brunovsky Form
It is assumed now that after defining the flat outputs of the initial MIMO nonlinear system, and after expressing the system state variables and control inputs as functions of the flat output and of the associated derivatives, the system can be transformed in the Brunovsky canonical form:
where \(x=[x_1,\ldots ,x_n]^T\) is the state vector of the transformed system (according to the differential flatness formulation), \(u=[u_1,\ldots ,u_p]^T\) is the set of control inputs, \(y=[y_1,\ldots ,y_p]^T\) is the output vector, \(f_i\) are the drift functions and \(g_{i,j}, \ i,j=1,2,\ldots ,p\) are smooth functions corresponding to the control input gains, while \(d_j\) is a variable associated to external disturbances. In holds that \(r_1+r_2+\cdots +r_p=n\). Having written the initial nonlinear system into the canonical (Brunovsky) form it holds
Next the following vectors and matrices can be defined
where matrix A has the MIMO canonical form, i.e. with elements
Thus, Eq. (27) can be written in state-space form
which can be also written in the equivalent form:
where the transformed control input is defined as \(v=f(x)+g(x)u\). By demonstrating differential flatness for the aerial vehicle’s model it is anticipated to express its dynamics in the canonical form defined by Eqs. (29), (30).
Design of Flatness-Based Controller for the Quadrotor’s Model
It will be shown, that the quadrotor’s model given in Eq. (14) is a differentially flat one, i.e. that all its state variables and the associated control inputs can be written as functions of a new variable called flat output and of its derivatives.
The following state variables are introduced \(x_1=x\), \(x_2=\dot{x}\), \(x_3=y\), \(x_4=\dot{y}\), \(x_5=z\), \(x_6=\dot{z}\), \(x_7=\phi \), \(x_8=\dot{\phi }\), \(x_9=\theta \), \(x_{10}=\dot{\theta }\), \(x_{11}=\psi \), \(x_{12}=\dot{\psi }\). Thus, one has the following state-space description for the quadrotor’s dynamic model
The flat output of the system is taken to be the vector \(y_f=[x_1,x_3,x_5,x_7,x_9,x_{11}]^T\). It holds that
According to Eq. (33) all state variables of the quadcopter can be written as functions of the flat output and its derivatives. Using this and Eq. (32) one also has that the control inputs of the quadcopter’s model, \(w_1\), \(w_a\), \(w_b\) and \(w_c\) can be written as functions of the flat output and its derivatives. Therefore, it is confirmed that the system is a differentially flat one.
Defining now the new control inputs
one has the following state-space description for the system
and the measurement equation for this system becomes
Thus, using differential flatness theory the quadrotor’s model has been written in a MIMO linear canonical (Brunovsky) form, which is both controllable and observable.
After being written in the linear canonical form the quadrotor’s state-space equation comprises 6 subsystems of the form
For each one of these subsystems a controller can be defined as follows
The control scheme is implemented in the form of two cascading loops. The inner control loop controls rotation angles, while the outer control loop sets the desired values of the rotation angles and in order to control position in the xyz-reference system. The computation of the reference setpoints for the rotation angles \(\phi _d(t)\), \(\theta _d(t)\) and \(\psi _d(t)\) and for the cartesian coordinates \(x_d(t)\),\(y_d(t)\) and \(z_d(t)\) takes into account the constraints imposed by the system dynamics.
Estimation of the Quadrotor’s Disturbance Forces and Torques with Kalman Filtering
It was shown that the initial nonlinear model of the quadrotor can be written in the MIMO canonical form of Eqs. (35) and (36). Next, it is assumed that the quadrotor’s model is affected by additive input disturbances, thus one has
or using the new state variables \(y_{f_i} \ i=1,\ldots ,12\) of the differential flatness theory-based model and the transformed inputs \(v_i, i=1,\cdots ,6\) one has
while by redefining the disturbance terms as \(\tilde{d}_1={d_1}sin(y_{f_7})\), \(\tilde{d}_2={d_1}cos(y_{f_7})sin(y_{f_9})\), \(\tilde{d}_3={d_1}cos(y_{f_7})cos(y_{f_9})\), \(\tilde{d}_4=d_a\), \(\tilde{d}_5=d_b\) and \(\tilde{d}_6=d_c\), the dynamics of the disturbed system can be written as
The system’s dynamics can be also written as \(\dot{y}_{f_1}=y_{f_2}\), \(\dot{y}_{f_2}={v_1}+\tilde{d}_1\), \(\dot{y}_{f_3}=y_{f_4}\), \(\dot{y}_{f_4}={v_2}+\tilde{d}_2\), \(\dot{y}_{f_5}=y_{f_6}\), \(\dot{y}_{f_6}={v_3}+\tilde{d}_3\), \(\dot{y}_{f_7}=y_{f_8}\), \(\dot{y}_{f_8}={v_4}+\tilde{d}_4\), \(\dot{y}_{f_9}=y_{f_{10}}\), \(\dot{y}_{f_{10}}={v_5}+\tilde{d}_5\), \(\dot{y}_{f_{11}}=y_{f_6}\), \(\dot{y}_{f_6}={v_6}+\tilde{d}_6\).
Without loss of generality, it is assumed that the dynamics of the disturbance terms are described by their second order derivative, i.e. \(\ddot{\tilde{d}}_i=f_{d_i}, \ i=1,\cdots ,6\). Next, the extended state vector of the system is defined so as to include disturbance terms as well. Thus one has the following state variables
Thus, the disturbed system can be described by a state-space equation of the form
where \({A_f}{\in }R^{{30}\times {30}}\), \({B_f}{\in }R^{{30}\times {6}}\) and \({C_f}{\in }R^{{6}\times {30}}\), with

For the aforementioned model, and after carrying out discretization of matrices \(A_f\) , \(B_f\) and \(C_f\) with common discretization methods one can implement the standard Kalman Filter algorithm using Eqs. (46) and (47). This is Derivative-free nonlinear Kalman filtering for the model of the quadcopter which, unlike EKF, is performed without the need to compute Jacobian matrices and does not introduce numerical errors due to approximative linearization with Taylor series expansion.
The dynamics of the disturbance terms \(\tilde{d}_i, \ i=1,\ldots ,6\) are taken to be unknown in the design of the associated disturbances’ estimator. Defining as \(\tilde{A}_d\), \(\tilde{B}_d\), and \(\tilde{C}_d\), the discrete-time equivalents of matrices \(\tilde{A}_f\), \(\tilde{B}_f\) and \(\tilde{C}_f\) respectively, one has the following dynamics:
where \(K{\in }R^{30{\times }6}\) is the state estimator’s gain. The associated Kalman Filter-based disturbance estimator is given by [19, 20]
Measurement update:
Time update:
To compensate for the effects of the disturbance forces it suffices to use in the control loop the modified control input vector
Simulation Tests
Initial simulation experiments were concerned with flight control of the quadcopter in the disturbance-free case. The considered reference trajectories are shown in Fig. 2. The implementation of the flatness-based control enabled accurate tracking of the reference trajectories. Convergence has been succeeded for the linear position and velocity variables to the associated setpoints as it can be seen in Fig. 3a and b and in Fig. 4a. Moreover, there has been convergence of the angular position and velocity variables to the associated setpoints as it can be seen in Fig. 4a and in Fig. 5a and b.

Control of the quadrotor in the disturbance free-case: a trajectory of the quadrotor in the cartesian space, b projection of the quadrotor’s trajectory in the xy plane

Control of the quadrotor in the disturbance free-case: a position and velocity along the x axis, b position and velocity along the y axis

Control of the quadrotor in the disturbance free-case: a position and velocity along the z axis, b rotation angle \(\phi \) and associated angular speed

Control of the quadrotor in the disturbance free-case: a rotation angle \(\theta \) and associated angular speed, b rotation angle \(\psi \) and associated angular speed
Additional simulation experiments were concerned with control of the quadcopter in flight under disturbance forces and torques. The estimation of the disturbance forces and torques is shown in Fig. 6. The implementation of the flatness-based control enabled accurate tracking of the reference trajectories. There has been convergence of the linear position and velocity variables to the associated setpoints as it can be seen in Fig. 7a and b and in Fig. 8a. Moreover, there has been convergence of the angular position and velocity variables to the associated setpoints as it can be seen in Fig. 8b and in Fig. 9a and b.

Use of the derivative-free nonlinear Kalman Filter in estimation of disturbances: a associated with linear motion, b associated with the rotational motion of the aerial vehicle (blue line real value, green line estimated value)

Control of the quadrotor in the presence of external disturbances a position and velocity along the x axis, b position and velocity along the y axis (blue line real value, green line estimated value, red line setpoint)

Control of the quadrotor in the presence of external disturbances: a position and velocity along the z axis, b rotation angle \(\phi \) and associated angular speed (blue line real value, green line estimated value, red line setpoint)

Control of the quadrotor in the presence of disturbances: a rotation angle \(\theta \) and associated angular speed, b rotation angle \(\psi \) and associated angular speed (blue line real value, green line estimated value, red line setpoint)
Conclusions
The paper has examined a new control scheme for quadrotors that is based on the use of differential flatness theory and on disturbances estimation with the use of a new nonlinear filtering method, the so-called Derivative-free nonlinear Kalman Filter. It has been shown that the quadrotor’s model is a differentially flat one since all its state vector elements and control inputs can be expressed as functions of a vector variable that is the flat output of the system. Thus, the application of differential flatness theory introduces a transformation for the quadrotor’s state vector or equivalently a change of coordinates (diffeomorphism) that brings the system to the linear canonical (Brunovsky) form. It has been shown that the linearized equivalent of the quadrotor is in controllable and observable form. For this new model the design of a state feedback controller is easier. Moreover, by applying Kalman Filtering on the linearized equivalent of the system it is possible to produce estimates for the quadrotor’s state vector without the need of computation of Jacobian matrices and partial derivatives (unlike other nonlinear filtering methods such as the Extended Kalman Filter). Finally, by redesigning the derivative-free nonlinear Kalman Filter as a disturbance observer it becomes possible to estimate in real-time the external disturbances that affect the quadrotor’s model and consequently to compensate them with the inclusion in the control loop of auxiliary control terms. The efficiency of the proposed control scheme has been confirmed through simulation experiments.
References
Wang, J., Boussaada, I., Cela, A., Mounier, H., Niculescu, S.I.: Analysis and control of quadrotor via a normal form approach. IEEE International Symposium on Mathematical Theory of Networks and Systems, Melbourne (2012)
Aguilar-Ibnez, C., Sira-Ramirez, H., Surez-Castan, M.S., Martnez-Navarro, E., Moreno-Armendariz, M.A.: The trajectory tracking problem for an unmanned fourrotor system: flatness-based approach. Int. J. Control 85(1), 69–77 (2012)
Raffo, G.V., Ortega, M.G., Rubio, F.R.: An Integral Predictive/Nonlinear \(H_{\infty }\) Control Structure for a Quadrotor Helicopter, vol. 46, pp. 29–39. Automatica, Elsevier (2010)
Raffo, G.V., Ortega, M.G., Rubio, F.R.: MPC with Nonlinear \(H_{\infty }\) Control for Path Tracking of a Quad-Rotor Helicopter, In: Proceedings of the 17th World Congress The International Federation of Automatic Control Seoul, July 6–11, 2008
Bosnak, M., Matko, D., Blasic, S.: Quadrocopter Control Using an On-board Video System with Off-board Processing, vol. 60. Robotics and Autonomous Systems, Elsevier (2012)
Chamseddine, A., Li, T., Zhang, Y., Rabbath, C.A., Theilliol, D.: Flatness-based Trajectory Planning for a Quadrotor Unmanned Aerial Vehicle Test-bed Considering Actuator and System Constraints, 2012 American Control Conference Fairmont Queen Elizabeth, Montral, June 27–29, (2012)
Lee, T.: Robust adaptive attitude tracking on SO(3) with an application to a quadrotor UAV. IEEE Trans. Control Syst. Technol. 21(5), 1924–1930 (2013)
Dydek, Z.T., Annaswamy, A.M., Lavretsky, E.: Adaptive control of quadrotor UAVs: a design trade study with flight evaluations. IEEE Trans. Control Syst. Technol. 21(4), 1400–1406 (2013)
Besnard, L., Shtessel, Y.B., Landrum, B.: Quadrotor vehicle control via sliding mode controller driven by sliding mode disturbance observer, Journal of the Franklin Institute, Elsevier, vol. 349, pp. 658684, (2012)
Fliess, M., Mounier, H.: Tracking control and \(\pi \)-freeness of infinite dimensional linear systems. In: Picci, G., Gilliam, D.S. (eds.) Dynamical Systems, Control, Coding and Computer Vision, vol. 258, pp. 41–68. Birkhaüser, Boston (1999)
Rudolph, J.: Flatness Based Control of Distributed Parameter Systems. Steuerungs- und Regelungstechnik. Shaker Verlag, Aachen (2003)
Villagra, J., d’Andrea-Novel, B., Mounier, H., Pengov, M.: Flatness-based vehicle steering control strategy with SDRE feedback gains tuned via a sensitivity approach. IEEE Trans. Control Syst. Technol. 15, 554–565 (2007)
Rigatos, G.G.: Modelling and Control for Intelligent Industrial Systems: Adaptive Algorithms in Robotics and Industrial Engineering. Springer, Berlin (2011)
Martin, P., Rouchon, P.: Systèmes plats: planification et suivi de trajectoires. Ecole des Mines de Paris, Journées X-UPS, Mai (1999)
Bououden, S., Boutat, D., Zheng, G., Barbot, J.P., Kratz, F.: A triangular canonical form for a class of 0-flat nonlinear systems. International Journal of Control, Taylor and Francis 84(2), 261–269 (2011)
Rigatos, G.G.: A derivative-free Kalman Filtering approach to state estimation-based control of nonlinear systems. IEEE Tran. Ind. Electron. 59(10), 3987–3997 (2012)
Marino, R.: Adaptive observers for single output nonlinear systems. IEEE Trans. Autom. Control 35(9), 1054–1058 (1990)
Marino, R., Tomei, P.: Global asymptotic observers for nonlinear systems via filtered transformations. IEEE Trans. Autom. Control 37(8), 1239–1245 (1992)
Rigatos, G.G.: Extended Kalman and Particle Filtering for sensor fusion in motion control of mobile robots. Math. Comput. Simul., pp. 590–607. Mathematics and Computers in Simulation, Elsevier (2010)
Rigatos, G.G.: Particle Filtering for state estimation in industrial robotic systems. IMeche J. Syst. Control Eng. 222(6), 437–455 (2008)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Rigatos, G., Siano, P. Control of Quadrotors with the Use of the Derivative-Free Nonlinear Kalman Filter. Intell Ind Syst 1, 275–287 (2015). https://doi.org/10.1007/s40903-015-0030-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40903-015-0030-9