
Abstract
Scouring due to jet causes a lot of damages to hydraulic structures; therefore, it is very important to predict the scouring depth due to the jet near a hydraulic structure to increase its durability. In this paper, for predicting the scour depth, multiple nonlinear regression (MNLR) analysis has been performed which is mainly derived from the data obtained by experimental analysis. For collecting data, experiment analysis has been performed with the help of a submerged vertical impinging circular jet in the hydraulic laboratory of National Institute of Technology, Hamirpur, Himachal Pradesh, India. In this paper, the Artificial Neural Network (ANN) model was also used for determining the scour depths. The results obtained from the ANN model have been compared with multiple nonlinear regression analyses. The performance of ANN was found more influential than the MNLR for predicting the scour depth.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The river-built structures are prone to scouring around their foundations. If these scouring depths become massive, then the structure's stability is adversely affected; therefore, the prediction of the maximum scouring depth is very essential in determining the hydraulic structure's stability. Sand, gravel, and other material's scouring, which mostly exists downstream of the hydraulic structure, is of great concern as the strength of hydraulic systems such as vertical gates, hydraulic jump type basin, weirs, and grade regulation structures, etc., may be affected by excessive scouring processes. In constructing the base of these structures, the local scour downstream of the hydraulic structures plays a very significant role (Mazurek and Hossain 2007). The local scouring due to jets depends on the characteristics of the sediment, the water velocity, the nozzle diameter, and the height of the jet (Rajaratnam et al. 2006). The scouring of cohesionless materials results in the removal of individual particles and the erosion resistance of such sand materials results from their weight. In determining resistance to scouring in cohesionless sediments, the size and density of the particle play a significant role. While in the case of cohesive sediments such as clay, the electrochemical forces act as a binding force for holding the particles together and restrict the erosion phenomenon in the sediments (Ansari et al. 2003). Scouring profiles can be classified mainly into two types, namely, dynamic scouring and static scouring. When the jet flow is in running condition, then scouring profiles is known as dynamic scouring profile, but when the jet flow is stopped, then scouring profile termed as static scouring profile (Ansari et al. 1999). The dynamic scour depth was found to be 2.6–3 times that of the static scour depth (Rajaratnam et al. 2006). In cohesionless sediments, several researchers have carried out laboratory studies on the scouring mechanism. Rouse (1939) first performed the experimental scouring investigation due to submerged vertical jet in uniform sediments. Since then, multiple experiments have been carried out to examine the response of the bed of the sediment under a submerged jet. The significant fundamental works and the problem of sediment bed response due to submerged water jets have been investigated by several researchers (Doddiah et al. 1953; Moore and Masch 1962; Sarma and Sivasankar 1967; Kobus and Westrich 1979; Altinbilek and Okyay 1973; Rajaratnam and Beltaos 1977; Rajaratnam 1982; Rajaratnam and Mazurek 1981, 2003, 2005; Moore and Masch 1962) and have conducted a series of experiments on three distinct types of submerged samples, such as natural stratified sediment, natural jointed sediment, and a laboratory remolded sediment using a vertical submerged circular jet to evaluate the scouring depth. In those experiments, the scouring rates were measured by the sample's weight loss. The findings revealed that the average scour hole depth increased with the logarithm of time in a linear relationship. Raudikivi (1992) has proposed that shape, buoyant weight, and packing affect the resistance of cohesionless materials. The temporal variation of scour depth in cohesionless sediments was also studied by Ansari (1999), Donoghue and Trajkovic (2001), Ansari et al. (2003), Mazurek and Hossain (2007), and observed that more than 70% of the scour occurred in the first 30–45 min from the start of the tests.
Several experimental studies were presented by integrating non-dimensional analysis with the model's experimental test in the past to explain the scour depth prediction. Due to the vast number of parameters influencing the scour, the experimental relationship could be insufficient. Conventional investigations have believed that regression equations are based on laboratory data for the prediction of scour depth. To overcome the problem of exclusive and nonlinear relationships, the Back Propagation Neural Network (BPN) was applied in this study, and a comparative study between Artificial Neural Network (ANN) and Multiple Nonlinear Regression (MNLR) has been done for the normalized scour depth caused by submerged vertical imping circular jet.
Methodology
First, scouring depth has been found out for different values of discharge and size of sediment by conducting experiment in the laboratory. Then, Multiple Nonlinear Regression (MNLR) analysis has been performed using experimental data. Furthermore, Artificial Neural Network (ANN) model was developed for determining the scour depths. The results obtained from the ANN model have been compared with multiple nonlinear regression analyses.
Experimental analysis
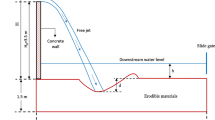
Experiment analysis has been performed with the help of a submerged vertical impinging circular jet in the hydraulic laboratory of National Institute of Technology, Hamirpur, Himachal Pradesh, India. A rectangular steel tank of dimension 1.24 m × 1.24 m × 0.84 m was used for experiments. The tank has been filled with the sediments up to a desired height in which submerged vertical circular jet has been intended to impinge. Figure 1 shows the experimental setup for scouring. The diameter of the nozzle was 0.0162 m and the nozzle was impinging at 900 to the soil surface. The jet discharge was measured using a pre-calibrated venturi meter having the coefficient of discharge (Cd) 0.975. Following materials were used in experiments.

Experimental setup for scouring
Sand
River sand (600 microns < size < 1.18 mm) was used in all experiments as cohesionless sediment. The mean size and specific gravity of sand were 0.84 mm and 2.65, respectively.
Fine gravel
Fine gravel (2.36 mm < size < 4.75 mm) was used in all experiments as the cohesionless sediment. The mean size and specific gravity of fine gravel were 3.34 mm and 2.65, respectively.
A total of 32 experiments were conducted with four different jet velocities, i.e., 1.57 m/s, 2.23 m/s, 2.87 m/s, and 3.94 m/s and four different impingement heights 5 cm, 9 cm, 18 cm, and 32 cm. The discharge was measured with the help of a pre-calibrated venturi meter. In the experiment, four different discharges were used randomly, and the jet velocity has been found out by dividing discharge by area of the nozzle of the jet. Details of the experiments are given in Table 1. The maximum scour depth was measured from the start of the experiment at times of 5 min, 15 min, 30 min, 1 h, 2 h, 3 h, 4 h, 5 h, 6 h, 7 h, 8 h, 9 h, 10 h, 11 h, 12 h, and 14 h, based on the increase in sediment’s scouring, and again at 24-h intervals until the conditions of equilibrium have been attained. The test was shut down and the tank was allowed to drain for each count, and then, scour depths were measured. When the scour depth did not vary over 24 h, equilibrium was considered to have been attained. From Table 1, it can be observed that maximum scour depth was found to decrease significantly for sediment size of 0.084 cm when H decreases from 32 to 18 cm, and thereafter, there was a slight change in maximum scour depth when H decreases from 18 to 9 cm. However, maximum scour depth increased when H becomes 5 cm. The impingement height 5 cm lies in the potential core which exists immediately downstream of the nozzle (length of potential core, H = 6d) (Albertson et al., 1950). It can also be noticed from Table 1 that maximum scour depth increased with increase in jet velocity at all impinging heights. Maximum scour depth was found to decrease with increase in sediment size (d50) for all values of jet velocity, as obvious in Table 1.
Non-dimensional parameters
All experiments were conducted at four different impingement heights until the equilibrium condition was attained. For dimensional analysis, Buckingham’s Pi method (Buckingham 1914) is widely used. Buckingham π theorem is a key theorem in dimensional analysis. It is a formalization of Rayleigh's method of dimensional analysis. In Buckingham’s Pi method, certain parameters like H (Jet characteristics), \({\mathrm{U}}_{0}\) (Hydraulic characteristics), and \({\uprho }_{\mathrm{s}}\) (Sediment’s characteristics) have been used as the repeating terms in each analysis.
Maximum static scour depth, dsms, due to submerged circular water jet in cohesionless sediments depends on U0 (Jet Velocity), d50 (Mean size of sediments), H (Impingement Height), d (Diameter of the nozzle), g (Gravitational Constant), ρs (mass density of sediments), ρw (mass density of water), and htw. (Tailwater depth). Specific gravity (G = ρs/ρw) and tailwater depth (\({h}_{\mathrm{tw}})\) are kept constant for all experiments. Therefore, maximum static scour depth can be expressed as in Eq. 1
Using Buckingham’s Pi method for dimensional analysis and assuming Uo, H and \({\rho }_{\mathrm{s}}\) as the repeating terms, following non-dimensional parameters, π terms have been formed:
Hence, Eq. (1) can be re-written in non-dimensional form as follows:
To find out the relative importance of each input parameter on scouring depth, a sensitivity analysis was performed for which mean squared error (MSE) has been calculated using Eq. 3 (Wackerly et al. 2008). The larger the value of Mean Squared Error (MSE) of the model means the highest influence on the output
where yo = observed values, yp = predicted values, and n = number of data points.
Development of ANN model
An Artificial Neuron Network (ANN) is a computational-based model based on the functions of the biological networks. It may be used as a simulation technique for the prediction of the scour depths by constructing a multilayer feed-forward network. Each first layer of ANN has received an independent variable as input data and the output of each layer in the hidden layer is multiplied with the corresponding weight, and then, the results are transferred from the hidden layer to the output layer. For further processing of the data, the output layer produces the network output. At this stage, to calculate the error, the output of the network is compared with the desired (target) output. If the error is appropriate, the output is presumed to be right; otherwise, the link weights are changed from the output layer and backward propagation. A new iteration starts once the weights are changed and so on until training is completed. After completion of iteration, the training is stopped. To predict time-dependent scour depth, Bateni et al. (2007), Bateni and Jeng (2007) used radial basis function (RBF), back-propagation network (BPN), and (ANFIS) models, and concluded that in comparison to other neural models, BPN provides a better prediction. In this research, the ANN model was used to predict the depth of scouring based on the back-propagation algorithm.
The ability of ANN to make a reasonable estimation is largely dependent on the selection of input parameters. The governing parameters which were used in the formation of scour hole are given by Eq. 1. In this study, two ANN models were established to perform the analysis.
-
(a) First, ANN model was established using data in the dimensional form (Eq. 1) to estimate scour depth in cohesionless sediments due to vertical submerged jet.
-
(b) The second model was developed using parameters in the non-dimensional (Eq. 2) to estimate the scour depth due to a vertical submerged jet.
ANN model was developed using some input variables. In this study, a total of 132 sets of data set were used to predict the scour depth which was collected from experimentally and literature review. The total data set was divided into two parts randomly; the first one is a training set consisting of 80% of total data points and the remaining was used for testing and validation.
Training
The network is ready for training when a network for an application has been structured. To start this procedure, the initial weights are selected randomly. There are two approaches for training that exist: supervised and unsupervised. Supervised learning needs a mechanism to provide the correct output to the network by either manually “grading” the performance of the network or delivering the inputs to the desired outputs. In unsupervised learning, self-study is implemented, and the network learns on its own. The network learns to identify patterns in the data set presented to it and categorize the input data into groups. Figure 2 shows the structure of an artificial neural network. I, H, and O in Fig. 2 represent input, hidden, and output layers, respectively. Three non-dimensional parameters like d/H, d50/H, and U0/(gH) 0.5 and five dimensional parameters U0, d50, H, d, g have been considered in the input layer to forecast the static scour depth in case of non-dimensional and dimensional form, respectively.

Structure of an artificial neural network
Network testing and validation
The training method continued until a steady value was achieved by the sum of the square error and the weight in the algorithm; after that, the model was validated with the data set, and then, the model prediction power was evaluated by entering the values of the subset of validation data and comparing the model outputs with the observed values. The model’s efficiency was determined by the correlation coefficient. Network training can be marginally improved by appropriate choice of network type, training algorithm, and internal network parameter. The range of these parameters used to generate the ANN model is shown in Table 2:
Sensitivity analysis
To assess the relative importance of each input parameter on scour depth (output), a sensitivity analysis was performed. It was carried out to determine the extent to which one of the input parameters has more effect on the model. This method is particularly useful to disclose new phenomena in cases where experiments cannot be designed to study each independent variable. The study is carried out in turns, taking one of the parameters from the input vector at each analysis and measuring the model’s output until all the parameters are covered.
Results and discussion
Figure 3 shows the photographic view of the scour hole profiles formed in the sand at different jet velocities and impingement heights. The differently colored portions of the scour hole depict the aggradation and degradation of the sand bed. The scour hole geometry was found to be symmetric around the center for different jet characteristics that were also noticed by Sarma and Sivasankar (1967). Dune has formed by raising the outer edge due to the accumulation of sand particles around the scour hole. Each dune had a distinct ridge line formed having sediments accumulated on both sides in a continuous slope. It was also found that most of the scouring (about 75%) occurs in the starting 40 min from the commencement of the experimental run. This thing was also noticed by Clarke (1962), Rajaratnam (1982), Ansari (1999), Donoghue and Trajkovic (2001), Ansari et al. (2003), and Mazurek and Hossain (2007).

Scour holes profiles formed in the sand at different jet velocities and impingement height
Multiple nonlinear regression
Multi-nonlinear (Oosterbaan 2002) was used to analyze the data collected from the experiment and the following equation was obtained:
The coefficient of correlation (R2) for Eq. 4 was = 0.945.
Figure 4 shows the comparison of observed maximum scour depth (by experiment) and computed maximum scour depth (from Eq. 4). These results have also been compared with the previous studies of Chakravarty et al. (2014) and Abhimanyu (2016), as shown in Fig. 4. From Fig. 4, it can be concluded that most of the data points were obtained from the current study and previous studies (Chakravarty et al. 2014; Abhimanyu 2016) falls within ± 25% error band. Therefore, proposed Eq. (4) is satisfactory for estimating the maximum static scour depth in cohesionless sediments.

Comparison of experimental and computed maximum scour depth
Table 3 shows the value of the MSE for each input parameter. From Table 3, it can be concluded that d/H and U/(gH)0.5 have the highest and the least effect on normalized scour depth (dsms/H), respectively. These observations are consistent with the current understanding of the relative importance of the different input parameters on normalized scour depth.
ANN model
Dimensional form
Figures 5, 6 and 7 show the comparison between the experimental values and predicted values by ANN models. It can be observed from the scatter plots that there was good agreement between the training data, testing data, and validation data with network prediction having (R2) values of 0.97615, 0.98002, and 0.96824, respectively.

Scatter plot of experimental and predicted scour depth by ANN model for dimensional data (training)

Scatter plot of experimental and predicted scour depth by ANN model for dimensional data (testing)

Scatter plot of experimental and predicted scour depth by ANN model for dimensional data (validation)
Non-dimensional form
Figures 8, 9, and 10 show a comparison between the output network with training, testing, and validation data, respectively. It can be observed from the scatter plots that there was good agreement between the training data, testing data, and validation data with network prediction having R2 values 0.9886, 0.9969, and 0.9782, respectively.

Scatter plot of experimental and predicted equilibrium scour depth for training (non-dimensional form)

Scatter plot of experimental and predicted equilibrium scour depth for testing (non-dimensional form)

Scatter plot of experimental and predicted equilibrium scour depth for validation (non-dimensional form)
Table 4 compares the value of R2 for the dimensional and non-dimensional form, for all three stages, i.e., training, testing, and validation. It can be noticed from Table 4 that the non-dimensional form gives a better result in comparison to the dimensional form.
Table 5 compares the ANN models, with one of the independent parameters removed in each case. The highest influencer input factor can be found out by deleting that factor as an input vector, the larger the value of MSE of the model means the highest influence on the output.
From Table 5, it can be concluded that d/H and d50/H have the highest and the least effect on normalized scour depth (dsms/H), respectively.
Conclusion
The present study deals with the prediction of the scour depth of cohesionless sediments by a submerged vertical circular jet through experimental observations and modeling analysis (ANN and MLNR). The result of normalized depth (dsms/H) of the current study falls within an acceptable value of ± 25% error band, which is in agreement with the previous studies. It was observed that, for a given jet velocity and jet nozzle diameter, maximum static scour depth increases with an increase in jet impingement height, but after a certain limit, this effect starts diminishing and the static scour depth starts decreasing with further increase in the impingement height. Based on the value of R2, it can be concluded that the ANN model gives better results in the analysis as compared to the Regression model. The efficacy of Regression model was lower, because the number of data points used in Regression analysis collected from experiments was very less in comparison to the ANN model. In both analyses, the normalized diameter (d/H) of the nozzle is the most affecting parameter to the output of the model, because the jet velocity mainly depends upon the diameter of nozzle at a constant discharge. ANN model in non-dimensional form performs better in comparison to the ANN model in dimensional form in case of prediction of normalized scour depth. Results of the sensitivity analysis also confirm that, relative to other variables considered in the study, (d/H) has significantly higher effect on the scour depth prediction.
Availability of data and materials
All the data used in this study are available from the corresponding author, upon reasonable request.
Code availability
Not applicable.
References
Abhimanyu SP (2016) Experimental study on Scour due to Submerged Vertical Impinging circular impinging Jet. MTech thesis, National Institute of Technology, Hamirpur (HP), India
Albertson ML, Dai Y, Jensen RA, Rouse H (1950) Diffusion of submerged jets. Trans Am Soc Civ Eng 115(1):639–664
Altinbilek H, Okyay S (1973) Localized scour in a horizontal sand bed under vertical jets. In: Proceeding IAHR Conference, vol 1, Istanbul. pp A14, pp 1–8
Ankit C, Jain RK, Kothyari UC (2014) Scour under submerged circular vertical jets in cohesionless sediments. ISH J Hydraul Eng 20(1):32–37
Ansari SA (1999) Influence of cohesion on local scour. PhD thesis, University of Roorkee, Roorkee, India
Ansari SA, Kothyari UC, Ranga Raju KG (2003) Influence of cohesion on scour under the submerged circular vertical jet. J Hydraul Eng 129(12):1014–1019
Bateni SM, Jeng DS (2007) Estimation of pile group scour using adaptive neuro-fuzzy approach. Ocean Eng 34(8–9):1344–1354
Bateni SM, Borghei SM, Jeng D-S (2007) Neural network and neuro-fuzzy assessment for scour depth around bridge piers. Eng Appl Artif Intell 20:401–414
Buckingham E (1914) On physically similar systems; illustrations of the use of dimensional equations. Phys Rev 4:345–376
Clarke F R W (1962) The action of submerged jets on movable material. Ph.D. thesis, Imperial College, London.
Doddiah D, Albertson M L, Thomas RK (1953) Scour from jets. CER, pp 54–4
Donoghue TO, Trajkovic B, Piggins J (2001) Sand bed response to submerged water jet. In: Proc. Eleventh Int. Offshore and Polar Engineering Conference, Stavanger, Norway, June 17–22
Kobus H, Leister P, Westrich B (1979) Flow field and scouring effects of steady and pulsating jets on a movable bed. J Hydraul Res 17(2):175–192
Mazurek KA, Hossain T (2007) Scour by jets in cohesionless and cohesive soils. Can J Civ Eng 34(6):744–751
Moore WL, Masch FD Jr (1962) Experiments on the scour resistance of cohesive sediments. J Geophys Res 1967(4):1437–1449
Oosterbaan RJ (2002) Drainage research in farmers' fields: analysis of data. Part of project “Liquid Gold” of the International Institute for Land Reclamation and Improvement (ILRI), Wageningen, The Netherlands
Rajaratnam N (1982) Erosion by submerged circular jets. J Hydraul Div Am Soc Civ Eng 108(2):262–267
Rajaratnam N, Beltaos S (1977) Erosion by impinging circular turbulent jets. J Hydraul Div 103(10):1191–1205
Rajaratnam N, Mazurek KA (1981) Erosion of plane turbulent jets. J Hydraul Res IAHR 19(4):339–359
Rajaratnam N, Mazurek KA (2003) Erosion of sand by circular impinging water jets with small tailwater. J Hydraul Eng ASCE 129(3):225–229
Rajaratnam N, Mazurek KA (2005) Impingement of circular turbulent jets on rough boundaries. J Hydraul Res IAHR 43(6):688–694
Rajaratnam N, Mazurek KA (2006) An experimental study of sand deposition from sediment-laden water jets. J Hydraul Res 44:560–566
Raudikivi AJ (1992) Loose boundary hydraulics, Chap 9, 3rd edn. Pergamon Press, New York
Rouse H (1939) A criteria for similarity in the transportation of sediment. In: Proceedings of the 1st Hydraulic Conference, Bulletin 20, State University of Iowa, Iowa City, Iowa, 1939, pp 33–49.
Sarma KVN, Sivasankar R (1967) Scour under vertical circular jets. J Inst Eng, pp 568–579
Wackerly D, Mendenhall et al (2008) Mathematical statistics with applications, 7 ed. Thomson Higher Education, Belmont
Funding
The authors received no financial support for the research, authorship, and/or publication of this article.
Author information
Authors and Affiliations
Contributions
All authors have contributed equally to this work.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interest.
Ethics approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shakya, R., Singh, M., Sarda, V.K. et al. Scour depth forecast modeling caused by submerged vertical impinging circular jet: a comparative study between ANN and MNLR. Sustain. Water Resour. Manag. 8, 43 (2022). https://doi.org/10.1007/s40899-022-00634-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40899-022-00634-z