
Abstract
The purpose of offshore support vessels (OSVs) is to support the oil industry in many sea activities, such as supply, anchor handling, towing, and construction. For a proper operation, a vessel requires different installed capabilities on board, and the availability and capacity of these capabilities are directly connected to the operational level of the vessel. In this work, a parametric model of an OSV is developed, taking into account the vessel capabilities and its connection to the main operations that these vessels can perform. Designs are ranked according to their operability score and capital cost. The model consists of parametric equations based on regression analysis from similar vessels and a preliminary configuration-based approach for specific modules, such as cranes, extra accommodation, and larger propulsion. The model takes into account different contexts in which the vessel will operate (e.g., North Sea, Arctic, and Brazil) for the scenario generation.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
1.1 Motivation for research
Increasing oil demand, coupled with the discovery of new oil fields, and obsolescence of old ships, are the main factors for the increase in demand for oil rigs, platforms, floating production, storage, and offloading vessels (Fig. 1), which means higher demand for offshore support vessels (OSVs). OSVs are ships specialized in the support of offshore activities, such as supplying, anchor handling, construction, drilling, and extraction. Our motivation is based on the assumption that this type of vessel requires different equipment and onboard configurations to accomplish different missions; therefore, the availability and capacity of these configurations are directly connected to the operational level of the vessel.

OSV market demand [17]
The complexity of offshore operations allows a little margin for error [17]. That means not only that a ship should manage its mission efficiently, but also that it should deal with the diverse set of environmental conditions, varying from the ultra-deep waters in the Brazilian pre-salt to harsh waves and wind conditions in the North Sea.
This work has as the main objective the development of a parametric model for configuration-based design of OSVs taking into account operability during earlier stages. As output, the main attributes of a new ship and a decision-making tool are presented.
Our example considers three kinds of OSVs: platform supply vessels (PSVs), anchor handling tug supply (AHTS) vessels, and offshore subsea construction vessels (OSCVs); three geographical areas (Brazil, North Sea, and Arctic); and three different missions (supply, towing, and construction). Hypothetical values are used for the sake of demonstrating the methodology.
1.2 Parametric design
The objective of the parametric design procedure is to establish a consistent parametric description of the vessel in the early stages of design, starting from the basic design principle that a vessel should be able to perform a given mission efficiently [6, 14]. Our approach is to present an entire iteration of the parametric design process applied to OSVs, starting from the mission parameters and concluding with the final design characteristics and attributes.
The first step consists of acquiring data for the numerous relations that must be established, generating the parametric equations. After that, new changes or a new project can take just few minutes.
Table 1 shows some ship characteristics that are considered parameters (variables) and attributes.
1.3 Offshore vessels
According to the American Bureau of Shipping [1], there are around 16 different types of OSVs, and each has specific characteristics and functions [1]. Given the wide operational range, these vessels can vary from simple supplements carrier to highly customized construction vessel. This article will focus only on the categories that are prevalent in the current market, namely PSVs, AHTS, and OSCVs (Fig. 2). Most operations to maintain the proper functioning of the offshore industry depend on these types of ships.

Three types of OSVs (AHTS, PSV, and OSCV)
The PSV has carrying equipment and supplying goods necessary to keep the platform working as a main function. These include fresh water, food, oil, tools, and pulverized cement. As a primary characteristic, this vessel type must have a big cargo deck area and deadweight capability. These ships range from 20 to more than 100 m in length, and the crew can number up to 20.
AHTS vessels are responsible for handling anchors for oil rigs. They carry out operations for positioning, maintaining, and moving platforms. Most have a large propulsion and extra bollard pull. They are also fitted with winches for towing and have open sterns and arrangements to facilitate the anchor release. The AHTS vessels can also be used to transport supplies.
OSCVs may be equipped with ROVs, and some of them have a moon pool. OSCVs are used in a wide range of operations, usually requiring good crane capacity, a large bollard pull, and a large open deck. They can accomplish missions such as installation of risers, spools, pipeline protection, subsea tree, dome and tie-in of umbilicals, maintenance, and repairs. Large accommodation facilities are also required for the construction workforce.
1.4 Operability
Operability may be defined as the ability to operate the system while it is performing its intended function [15]. The operability of the vessel is associated with its capacity and availability, which can be measured by the chances the ship will accomplish its mission in any situation, whether in icy conditions in the Arctic Sea or in the warmer and calmer Brazilian coastal waters. In other words, to operate 100 % of the time, the vessel must be able to sail in a certain speed through all kinds of sea conditions and to operate equipment and deploy contracts under any weather. While 100 % operability is nearly impossible (given the unpredictability of the market, environment, and field conditions), our assumption is that the higher the operability, the better a ship performs.
During conceptual design, an usual approach is to use CFD simulation and seakeeping analysis that contain information about the sea and the ship, such as seakeeping compared to speed and heading to measure operability [2]. However, full measurement of operability of an offshore vessel is a demanding task, requiring information about each of the ship’s capabilities, sea state, heading, crew style, and so on.
A simple manner of calculating operability would be regressions based on a database from similar vessels and previous simulations. The mission will also affect the operability, according to its different operational states [7]; for instance, whenever one AHTS has to handle an anchor and fasten it on the seafloor and in the upright position, the vessel must have a good dynamic positioning system (DPS) and large cranes to guarantee close to 100 % operability.
The ship should function in different environments. For instance, in Brazilian waters, the depth may vary from 200 to 3000 m, while North Sea reaches almost 700 m, but with much harsher sea conditions during the winter season.
Figure 3 shows how the maximum vessel speed varies according to the wave direction. As it shows, when the vessel sails toward the wave direction, the safety speed decreases [13].

Vessel safety speed versus swell direction—red contour presents max speed for passenger safety [13]
1.5 Configuration-based design
Parametric design can be combined with configuration-based design (CBD), where each design may have a specific module, such as cranes, extra accommodation, larger propulsion, or a combination of any of these features [3]. For example, in Fig. 4, when we select “+Length” and “Extra Accommodation,” the methodology should take into account that the ship on the right will have more accommodation and will be longer than the ship on the left. This creates a design group and system for evaluating each design, taking into account the performance, operability, and different operation places (e.g., North Sea, Arctic, and Brazil).

Basic example of configuration-based design
Operability value changes only if an extra module is added, and the user can change the financial return and probability values according to the OSV’s empirical data. During the CBD, the designer can modify the parametric equations and the operability values as well.
2 Methodology
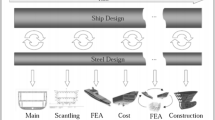
2.1 Basic design process
A basic design process follows four steps: generate, analyze, evaluate, and decide [4], as summarized in Fig. 5.

Parametric design methodology
Generate is the step where the user stipulates information about the mission and the ship. The Mission Information contains data about the tasks to perform, such as place of operation. The Parametric Equations box contains all the information to calculate the attributes with the parameters. The user information regards to specific stylistic preferences from the user. Constraints have data about the taxes, ECAs, and environment.
With these equations, it is possible to Analyze the KPIs, such as operability, power, number of crew members, and data to create a simplified ship design. Criteria and Main Dimensions and Operability contain attributes about the ship; joining them creates the design set.
Evaluate consists of obtaining the values of each determined criteria. The user should input the constraints and the task values, satisfying the mission requirements and verifying the designs. Here, the design and criteria are placed side by side in graphs to facilitate the comparison of the designs.
Last stage consists of Decide, in which the user selects the best design to attend the criteria—in this case, operability. The user can also select a weight to prioritize price or operability.
A decision tree method will be used to point out the most cost-effective design. The method takes into account the probability of an event’s occurrence and places a value on each possible decision [10].
2.2 Operability and CBD applied to the problem
To improve the operability, a configured to order method is considered [16], which allows the customer to select a base ship (PSV, OSCV, or AHTS) and configure some items inside of it according to the mission or the place of sail.
An AHTS vessel, for instance, has tow and supply as its main mission. For anchor handling to manage to complete another mission, such as construction, the vessel may need to have new capabilities installed such as new cranes, extra accommodation, and moon pools with ROVs (Fig. 6, step 1). To be able to navigate both in Brazil and in the Arctic, for instance, the ship must have the ability to be in ultra-deep waters (Brazilian waters) and by ice class (Arctic) (Fig. 6, step 2).

Different missions and locations, each requiring different ship capabilities
As stated, the operability is directly connected with the mission, place, and type of the vessel, as well as the vessel configuration. Each change of the vessel, mission, and place can modify the ship’s operability significantly. For example, a simple PSV with the mission construction, wherein the ship has no construction facilities, will have an operability approaching 0 %.
Figure 7 shows that the vessel, mission, and place of operation influence operability.

Relationship between operability, vessel, mission, and place
3 Application of the methodology
3.1 Basic case of the methodology
To explain the methodology, a basic case is presented, using hypothetical values just for the sake of illustration. The purpose is to evaluate which design is most profitable, considering three different geographical locations: Brazil, North Sea/Arctic (Norway), and the Gulf of Mexico (GoM, USA). Each one has different levels of sea states and environmental conditions.
In Table 2, each distinct characteristic of these three different fields is presented. Beauf. represents the Beaufort scale, connected to the wind speed and size of the waves observed in that region [11]. Distance work loc. is the distance between the shore and the platform. Revenue per trip is how much money the owner receives per trip. Cost per trip is the spending to navigate in that region. Availability determines how many months per year it is possible to navigate each region, and the Operation Time is how many days are necessary to accomplish the mission.
Table 3 shows four different designs, two of which are ice class. Each design has different lengths, beam, and draught. The capital expenditure (CAPEX) is a fictitious number, calculated based on the size of the ship and its capabilities on board.
Speed is given in knots. The Ice class field informs whether the design has ice class capabilities. Consumption gives the average consumption of fuel in tons per day. Seakeeping contains a value that determines the maximum sea state level that each design can sail. When the sea state level is greater than the vessel can support, it cannot sail and its operability will be <100 %. Bollard Pull informs how many tons of bollard pull the ship can tow.
For the sake of example, let us consider the North Sea fields, extending to the Arctic. Table 4 presents a hypothetical time in days for each trip, adding the time to arrive at the platform and the operation time, how many tons of fuel were spent during the trip, the cost of the trip, and the cost of the fuel. The last column, operational expenditure (OPEX) plus voyage expenditure (VOYEX) are the sum of the cost of the trip and the cost of fuel.
Based on a unique mission (Table 4), different hypothetical scenarios were created, one of which appeared in Table 5. To sail 1 year on the North Sea, the ship would sail for 2 months in sea state level 8, 3 months in sea state level 7, and 7 months in sea state level 5. The number of trips would be approximately 72 for all of the designs; however, the two designs with no ice class will have reduced operability in regions near the Arctic, which will shorten the number of trips.
To obtain the operability, environmental particularities and sea condition were taken into account. For example, if the vessel has no ice class capabilities, its operability will only decrease, because the border of the North Sea and Arctic regions is considered frozen during 4 months in the year. Where the sea state level is 8 during 3 months and the vessel supports only sea state level 7, its operability will be 75 %.
Yearly cost and yearly revenue are obtained taking into account the operability value as multiplication factor, in a simple assumption (Eq. 1).
Profit is simplified, calculated by subtracting yearly revenue and yearly cost, after deducing the CAPEX. Considering distinct scenarios, the vessel operability will be different and the profit will be positive or negative, and the better design for each scenario will change. In Table 6, for each design in each scenario, the profit is presented for 10 years of work.
In this simple case, the best design for each scenario is considered the higher profit. For scenario 4, for example, the best design is number 1. However, whether the ship designed achieves the criteria or not, the user can easily change the attributes with the CBD and each variation will change the price as well, as Table 7 reflects. Changing the attribute Power from 1 to 1.2 (that is, adding 20 %), also changes the price.
To improve the usual spreadsheet-like used during the early stages, we propose a JavaScript + HTML environment, allowing the user to create functions and objects to store information. This information can be saved in different locations (Design ID), posteriorly processed, and shown to the user as graphs. Reflecting the initial methodology, the decision tree will be entered into the algorithm to select the best design. Figure 8 contains the steps of the algorithm.

Algorithm steps
The best advantage of using JavaScript + HTML is the web application (app) end product. With just one server installation, several users have access to the algorithm and can make their own designs.
To change the attribute values, the user only needs to click one button and set the new value. After all inputs, the web page will show the user the decision tree, allowing the user to compare the attributes and attach weights to each attribute. The main algorithm and equations behind the JavaScript + HTML code are shown in the case study at the following section.
4 Case study
4.1 Parametric equations
Parametric equations used are based on the survey made by Erikstad and Levander [5] for the main types of OSV, which included graphs that made it possible to make a linear regression and obtain some parametric equations.
Finding the enclosed volume requires data about the superstructure and the volume in each deck. Then, the inverse parametric equation supplies gross tonnage (GT). The design starts from the mission (supply, towing, or construction), and the user will define the ship missions and the necessary value for the attribute directly connected with the mission.
Our approach selects one main attribute for each mission (namely supply: deadweight; towing: bollard pull; and construction: deck cargo weight capacity) and from these defines the GT inverting the Erikstad and Levander’s equations [5]. Therefore, given the mission, the user will inform the value of the attribute, and from this value, it is possible to find GT. Table 8 shows the mission related to the main attribute and the inverse parametric equation.
Equations 2 and 3 are part of Table 8.
Hereafter the GT can be connected to the length, breadth, and/or draught (Table 9). The GT value is the input for the parametric equations, according to the methodology shown in Fig. 8. This returns every attribute value. Nevertheless, if a user is not satisfied with the results, a new design can be created to modify the ship length, breadth, or draught.
The mission also changes the operability. For example, the selected ship type is PSV and the selected mission is construction. The ship has no facilities to accomplish the construction mission. The operability may be modified with the extra boxes.
After generating the designs, the analysis is shown. The users may create as many designs as they want and generate attributes for each stored design by clicking the calculate button.
4.2 Adding configuration modules
One of the objectives of this method is to add different modules to the design; each module will affect the results and the final decision. The user can choose all options or only one; obviously checking all options will increase the price, but may improve the operability. The modules’ options, which may be chosen, are presented in Table 10, as well as how each module affects the main ship attributes (price, power, accommodation, DWT, bollard pull, deck cargo weight, and lightweight tonnage).
For instance, when the user adds a new accommodation, the price will increase by 0.5 % and the DWT will decrease by 0.5 %. One percent in extra power increases the price by 0.25 % and decreases the DWT by 0.04 %. When DP II is yes, the price increases by 5 %.
Just as the configuration modules affect the main attributes, they affect operability. However, operability may improve if a required module is added.
Every set of type, mission, and geographical location will give a different value for operability. For example, to navigate through the Arctic Sea, a ship must be ice class, or operability will be low. Table 11 shows whether it is good, neutral, or bad to add a module for the operability value according to the mission, ship type, place, and extra modules.
4.3 Describing the case
This case will take into account three types of vessels (PSV, AHTS, and OSCV). Each type will have different places of operation and missions, and consequentially different expected operability. Then, each design will have a set of nine scenarios. In each scenario, the financial return will be different. As before, all values are hypothetical and can be later adapted to each user case.
Each mission and place will have a probability of occurrence according to the ship type. For example, for a PSV, a supply mission has a higher probability than a towing mission, so the probability for supply is bigger. The financial return combined with the operability, probability, and the CAPEX will give the decision weight.
The first design is a basic PSV, meaning that we start from a simple design and every extra configuration has been switched to “no” at the graphical user interface (GUI). The information about the design in each scenario is shown in Table 12. For one design, nine scenarios are created and analyzed. The earned money is presented in the last column of Table 12. The next section will show the CAPEX. The value of the mission for each scenario is shown in the DWT, BP, and CDW columns.
Table 12 also lists AHTS and OSCV design, for which the GT value has to be the same for each mission. The probability value for the scenarios will be shown in the decision tree in the next section.
The user can change all the presented fields at the GUI, in order to evaluate different designs in different scenarios and make the decision with confidence as to which design is the best in which to invest.
4.4 Calculated attributes for each design
The calculated attributes for each design are shown in Fig. 9. In this case, for instance, the OSCV design is more expensive than the others, and the ship is bigger. However, the AHTS design has more bollard pull and installed power.

Calculated attributes for each design
PSV design is the smallest; nevertheless, its operability is greatest for a mission supply in Brazil. For other scenarios, the only attribute that will change is the operability.
When calculating the attributes at the GUI, it is presented on the web page simply by clicking at the button "Calculate" (Fig. 8). New designs can be obtained when missions and requirements are changed.
5 Decision tree
A decision tree will be utilized to facilitate the decision. It is important to know the probabilities of occurrence in each scenario; for example, one PSV has a supply mission 70 % of the time, a towing mission 20 % of the time, and a construction mission 10 % of the time. An experienced team should make the expected financial return and the probabilities. However, in this work, these values are hypothetical. The decision will be between the three types of vessels and whether to build a ship or invest money in an savings account.
The decision tree for the PSV design is presented in Fig. 10. The probability values can be found on this figure, and the financial return for each scenario is presented in Table 12.

Decision tree for a PSV design
As Fig. 10 reveals, the best scenario for a PSV design is, considering our hypothetical case, to navigate the North Sea with a supply mission. The earned money in this case will be US$48 million without deducting the CAPEX value. If the user wants a ship to sail to Brazil, there are two possible scenarios: a supply mission or a towing mission. Changing the operability, earned money, probability values changes the best scenario.
Equation 4 shows how to calculate the decision value for a PSV in the mission supply.
Although in this case the object is to choose the best design, it is possible to see which scenario is better for each design. Just as a decision could be made for the PSV design, the user can also evaluate the decision value between an AHTS design and an OSCV design.
For the AHTS, each mission has a 30 % chance of being supply, 60 % chance of being towing, and a 10 % chance of being construction.
The same assumption made to calculate the expected return of investment for a PSV design will be made to calculate the expected cost for OSCV.
For the OSCV design, the probability values for each mission are as follows: 20 % chance of being supply, 10 % chance of being towing, and 70 % chance of being construction.
Comparing the missions of supply and towing, towing is better whether the place of sail is Brazil or the North Sea. However, if the place is the Arctic, the best mission is supply.
The OSCV design yields greater return than the other two; however, this assessment presumes the deduction of each design’s CAPEX. The decision can be made. In addition, the decision can be extended to build a ship or invest the money in a bank account.
Figure 11 shows the final decision, deducting the CAPEX and comparing the ships with the invested money. As shown, it is better to invest money. However, this result reflects a 1-year time horizon. Extending the time line for 3 years, building a ship yields a higher return. Every variable can change the results, however, including the taxes from the bank. Within 3 years, building an AHTS returns US$ 24.210.000,00, whereas investing yields US$ 81.033.750,00.

Decision making
Figure 11 reveals that the best ship to build is an AHTS, after a PSV and finally the OSCV. However, given that ships function for more than 10 years, the OSCV design is a better way to earn money than a savings account.
These results can change considering real values for the probability, operability, and the financial return at the end of each scenario. Each company can include its own values and equations and deliver to the customer the best choice for profit.
6 Concluding remarks and future works
This work presented the adaptation of the CBD to parametric design, by means of an algorithm that measures the operability and shows the principal attributes of OSVs in different scenarios and missions, having as input the mission of the vessel as described by Levander [12].
To achieve the objective of developing a parametric model, JavaScript and HTML tools were used. The parametric equations obtained and some acquired knowledge about the operability made it possible to quantify the operability value for every scenario.
The addressed methodology helped to achieve the result and to organize the steps to make the parametric model. The decision tree method proved that it could be extended to include multiple decision points and multiple outcomes as long as the outcome has the probability of affecting occurrence and value.
During the development of this work, some difficulties emerged. The principal one was how to measure operability. As this attribute depends on several parameters, and there are no data or equation about how the ship configuration affects the operability, it was implemented according to Table 11. Another difficulty was the information about the financial return and the probabilities, data the companies did not in general provide.
As shown, some parametric equations were obtained from the research of Erikstad and Levander [5]. Other attributes could be calculated; nevertheless, the data (equations) about new attributes have not been found. Other research or company information may be needed to make a whole ship design, for instance incorporating it with responsive systems comparison (RSC) [8].
The outcomes showed companies can use similar algorithm with their own equations, values, and scenarios, simply modifying values inside of the program. The model also proved that it is possible to have a ship design only with simple parameters—in this case, a gross tonnage value given by the mission of interest.
The model also proved that quick exchange of information between a possible customer and a company is possible; however, the GUI was not polished enough. The GUI could be improved using the JQuery user interface.
References
ABS, Offshore Support Vessels: Classification, Certification and Related Services for Offshore Support Vessels (2005)
T.E. Berg, B.O. Berge, S. Hanninen, R.-A. Suojanen, H. Borgen, Design considerations for an arctic intervention vessel, in OTC Arctic Technology Conference, Houston, TX, USA (2011)
T. Brathaug, J.O. Holan, S.O. Erikstad, Representing design knowledge in configuration-based ship design, in COMPIT 7th International Conference on Computer and IT Applications in Maritime Industries, Liege, Belgium (2008)
S.O. Erikstad, A Decision Support Model for Preliminary Ship Design. PhD, Thesis (NTNU, Norway, 1996)
S.O. Erikstad, K. Levander, System based design of offshore support vessels, in Proceedings 11th International Marine Design Conference—IMDC201 (2012)
H.M. Gaspar, Parametric Ship Design a Simple Application in HTML + Javascript. (HIALS, 2014). http://uscience.org/files/parametric.html
H.M. Gaspar, S.O. Erikstad, Extending the energy efficiency design index to handle non-transport vessels, in COMPIT’09, Budapest, Hungary (2009)
H.M. Gaspar, D.H. Rhodes, A.M. Ross, S.O. Erikstad, Addressing complexity aspects in conceptual ship design: a systems engineering approach. J. Ship Prod. Des. 28(4), 145–159 (2012). (added in SNAME Transactions, 120)
H. Gaspar, P.O. Brett, A. Ebrahim, A. Keane, Data-Driven Documents (D3) Applied to Conceptual Ship Design Knowledge (COMPIT, Newcastle, 2014)
C. Haskins, Systems Engineering Handbook: A Guide for System Life Cycle Processes and Activities (San Diego, INCOSE, 2006)
S. Huller, Defining the Wind: The Beaufort Scale and How a Nineteenth-Century Admiral Turned Science into Poetry (Crown Publishers, New York, 2004)
K. Levander, System Based Ship Design (NTNU, Norway, 2006)
Maritime New Zealand, Safety Bulletin Issue 26 (2011). http://www.maritimenz.govt.nz/Publications-and-forms/Commercial-operations/Shipping-safety/Safety-updates/Issue26-mnz-safety-bulletin-may-2011.asp
M.G. Parsons, Parametric Design, Ship Design and Construction, vol. 1 (SNAME, Alexandria, 2004)
Uwohali Incorporated, Operability in Systems Concept and Design: Survey, Assessment and Implementation. Final Report, Alabama (1996)
T. Usltein, P.O. Brett, Seeing what’s next in design solutions: developing the capability to develop a commercial growth engine in marine design, in 10th IMDC, Trondheim (2009)
A. Yeo, Marine Money Offshore—Introduction to Offshore Support Vessels. Singapore (2013). www.marinemoneyoffshore.com/node/4011
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Vidal, H.L., Gaspar, H.M., Weihmann, L. et al. A parametric model for operability of offshore support vessels via configuration-based design. Mar Syst Ocean Technol 10, 47–59 (2015). https://doi.org/10.1007/s40868-015-0001-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40868-015-0001-8