
Abstract
Purpose
During walking, the slip velocity relative to the center of mass velocity can be one of the determinants of falls. We hypothesized that participants would select their strategy (classified by strategy type and measured by the distance of recovery landing or next forward stepping) according to both walking velocity and stance of legs. This study aimed to assess the relationship between the walking velocity relative to the slip velocity (maximum 1.6 m/s) and the corrective response and evaluated the element of the posture at the moment of slipping associated with the corrective response.
Methods
Ten healthy young adults showed leading leg perturbation in two isolated velocity conditions during over ground walking (slow: 0.9 m/s, fast: 1.6 m/s) using a built-in, double-belt treadmill. We defined the corrective response to perturbation as the change in the heel marker distance post-perturbation. We examined the postural parameters affecting the difference in corrective response.
Results
During fast walking, at a velocity near the maximum slip velocity, all participants overcame slipping and kept walking. During slow walking, at a velocity less than the maximum slip velocity, most of the participants took wide steps or stepped backwards and stopped walking. During slow walking, the step length (r = 0.84, p < 0.01) and the hip flexion angle (r = 0.78, p < 0.01) were strongly correlated with corrective response.
Conclusion
One of the targets of the therapeutic interventions may be expanding the hip’s range of motion to secure a stable base of support for elderly people with slow walking velocity.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Body balance control during walking is affected by position and velocity of the center of mass (CoM) [1, 2]. The CoM position and velocity have been characterized as key determinants of falls as the dynamic gait stability [3,4,5,6]. Falling is often caused by a slip perturbation forcing the CoM away from the base of support (BoS). Slipping causes approximately 40–50% of all fall-related injuries [7]. The backward falls are particularly dangerous because they frequently cause hip fractures [8]. If the backward balance is lost, able-bodied people usually quickly relocate the BoS using different strategies, such as by taking a backward step [2]. A fall could occur if a loss of backward balance caused by slipping occurs faster than taking a backward step. Therefore, the slip velocity relative to the CoM velocity can be one of the determinants of falls.
No previous study has revealed the relationship between the walking velocity and slip velocity. Experimental studies on artificial slipping environments using a movable platform [9], mineral oil [10], and water-detergent mixture [11] have not been able to clarify the exact relationship between the slip perturbation velocity and CoM velocity. The slip velocity of these experiments depends on the bodyweight of the subjects. To clarify the relationship, the experimental condition must be so set that there is a subtle difference between the walking velocity and slip velocity for healthy young adults. However, if slip velocity is set close to the walking velocity, the healthy young adult may not fall. The outcome of slip perturbation cannot be set as falling or not falling. Therefore, the present study was set the corrective response using evaluating the strategy type and leg movement as a detailed reaction for perturbation.
The main aim of this study was to reveal the relationship between the walking velocity relative to the slip velocity and the corrective response for overcoming a perturbation, keep walking or stop walking. The second aim was to evaluate the element of posture associated with the corrective response at the moment of slipping. We hypothesized that participants would select their strategy (classified by strategy type and measured by the distance of recovery landing or next step in the forward direction) according to both, the walking velocity and stance of the legs. To achieve this purpose, we used a double-belt treadmill built into the floor. This treadmill can independently control the perturbation velocity and timing of each belt by a computer program.
2 Methods
2.1 Participants and Equipment
Ten healthy young adults (males aged 21.0 ± 1.0 years; height, 1.71 ± 0.08 m; leg length, 0.86 ± 0.05 m; weight, 63.1 ± 6.2 kg) with no history of neural or musculoskeletal disorders were recruited. All participants provided written informed consent according to the guidelines of the Declaration of Helsinki before the start of the study. This study and its protocols were approved by the Saitama Prefectural University Ethics Review Committee (No. 28821).
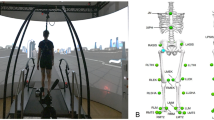
We used a built-in double-belt treadmill (AM 6500, 1.97 × 1.00 m, 1000 Hz, Bertec, USA, Fig. 1a) with independent force sensors and motors, recessed into the floor. The walkway in this experiment was approximately 10 m long, including the treadmill. The participants were exposed to identical slip perturbation conditions while walking on the treadmill. Customized software by LabVIEW (2016, National Instruments, Austin, USA) controlled the treadmill, as well as the synchronized data between the motion capture system and the treadmill. The three-dimensional marker data were collected using a 17-camera Vicon motion capture system (MX-T series, 100 Hz, Nexus 2.5, Oxford, UK) with a marker setting of the Plug-in-Gait full-body AI model (39 reflective markers).

Schematic of the experimental methods. a Experimental equipment and environment of the experimental room. b Overhead view of the built-in double belt treadmill showing the condition in which perturbation occurred through the use of programming software. c Profile of the slip perturbation
2.2 Slip Perturbation Experiment
Participants were instructed to walk along the metronome and walk on a treadmill with no prior knowledge of the slipping side. We aimed to prevent the conscious step length from interfering with comfortable walking. A previous study reported that the self-selected speed may not optimize gait stability at perturbation [12]. Therefore, the participants were only instructed to walk along the metronome. Moreover, participants were men of almost the same height.
The participants practiced walking sufficiently to maintain a comfortable step length along the metronome before the experiments. We set the tempo of the metronome to examine two walking conditions referring to a previous report [13]. The fast walking condition was 140 bpm, which was less than the maximum slip velocity. The slow walking condition was 80 bpm, which was equal to or greater than the maximum slip velocity. The treadmill was set to reach the maximum slip velocity of 1.6 m/s. This slip velocity was the same as that noted for when the elderly participants slipped in a previous study [14]. We programmed the treadmill to incur the perturbation when the step positions satisfied both of the following terms. The slipping side belt accelerated forward (1) when the slipping side foot stepped onto the slipping side belt at a distance greater than 500 mm and (2) when the no slipping side foot stepped onto the no slipping side belt at a distance less than 500 mm (Fig. 1b). The threshold of the slipping side ground reaction force (GRF) was set at 5 N. The forward slip velocity was accelerated to 1.6 m/s with an acceleration of 5.3 m/s2 during 0.3 s and decelerated to 0 m/s with an acceleration of 5.3 m/s2 during 0.3 s (Fig. 1c). The perturbation was set to occur only under the aforementioned conditions. When the position of their steps did not meet the set conditions the participants received no perturbation and walked through. To avoid the learning effect by repeating occurred same perturbation, we randomized the target side (left or right) of perturbation. The experiment for each condition was finished when total 4 perturbations occurred on the right (2 trials) and left (2 trials) sides. As a result, each participant performed total 5 to 8 trials including that perturbation was not occurred. Therefore, 1 to 4 dummy trials were randomly included.
2.3 Classification of the Strategy Type and Measurement of the Distance of Recovery Landing or Next Step in the Forward Direction
During the experiments, we classified the strategy type to overcome slip perturbation for each trial as follows: (1) stop walking (taking a wide step or step back) and (2) keep walking (get over the slip and go through the trial). Moreover, we measured the change in the heel marker distance (Fig. 2) to more accurately classify how large a step the participant took or how easily they overcame the disturbance using Eq. 1 (given below). We calculated it as the change from the anteroposterior distance between each heel marker when the perturbation occurred to that after the perturbation.

Flow chart for the classification of the strategy type and measurement of the distance of recovery landing or step in the forward direction. If the change of heel markers distance is negative, the leading leg is set widely in front of the trailing leg. In other words, the participant stops walking and either takes a wide step or a step back. If the change of heel markers distance ranges from 0 to 1, the leading leg is set narrowly (a short distance) in front of the trailing leg. If the change of heel markers distance is positive (over 1), the trailing leg is in front of the leading leg. In other words, the participant gets over the perturbation
The change in the heel marker distance was negative when the leading leg was set widely in front of the trailing leg. Therefore, the participants stopped walking and either took a wide step sideways or took a step back. The change in the heel marker distance ranges from 0 to 1 when the leading leg is set narrowly (at a short distance) in front of the trailing leg. The change in the heel markers distance was positive and above 1 when the trailing leg was in front of the leading leg. Therefore, the participants got over the perturbation (Fig. 1d). We used the data from all 80 trials, from both slipping sides for both slipping velocity conditions for the 10 participants.
2.4 Definition of Postural Parameters
We defined the calculated parameters related to the walking velocity and posture when the perturbation occurred in the following manner: (1) Walking velocity, calculated by the differential of the CoM displacement in the anteroposterior direction before the perturbation; (2) The center of pressure (CoP)–CoM distance, calculated as the anteroposterior distance between the CoM and the leading/slipping leg’s CoP, normalized by each participant’s leg length [4, 15]. The CoP–CoM distance was negative when the CoM was in front of the CoP and positive when the CoM was behind the CoP; (3) The CoP–CoM angle, defined as the sagittal plane angle between the vertical axis of the lab and a vector joining the leading/slipping leg’s CoP and CoM [16]. The CoM–CoP posterior inclination was negative, and the anterior inclination was positive; (4) Step length, the heel marker distance between the leading and the trailing legs, normalized by each participant’s height when the perturbation occurred; (5) Hip flexion and extension, knee flexion, and extension, and ankle dorsiflexion and plantarflexion angles on the leading/slipping and trailing/no slipping sides; and (6) Trunk anterior tilting angle.
2.5 Statistical Analyses
The paired t-test was used to compare the walking velocity and maximum belt velocity between the two walking conditions (fast and slow). The non-paired t-test was used to compare all parameters between the different strategy types (slow: wide step vs. narrow, fast: narrow vs. get over) for each walking velocity condition. The Lilliefors’s test was preliminarily performed to check the normality distribution, and Spearman rank correlation coefficients were used to examine the associations between the change in the heel marker distance and postural parameters. Differences in the corrective responses incidence among the subjects were assessed with Chi square (X2). The statistical significance level for all measured values was set at p < 0.05. All analyses were performed using custom-written MATLAB software (The MathWorks Inc., US).
3 Results
The walking velocity showed a significant difference between the slow and fast walking conditions (p < 0.05, slow: 0.91 ± 0.13 m/s, fast: 1.62 ± 0.29 m/s). The maximum belt velocity showed no significant differences between the conditions (p = 0.79, slow: 1.66 ± 0.03 m/s, fast: 1.66 ± 0.03 m/s). For all trials, the change in the heel marker distance depended on the walking speed. “Wide step or step back” and “narrow” responses were observed during slow walking. “Narrow” and “get over” responses were observed during fast walking. The incidences of corrective responses were significant different among the subjects on both slow (X2 = 21.25, p < 0.05) and fast (X2 = 30.63, p < 0.01) conditions.
Table 1 shows all the parameters for the different strategy types (slow: wide step vs. narrow, fast: narrow vs. get over) in each walking condition. In both walking conditions, the walking velocity, step length, and hip extension and knee extension angles on the non-target side were significantly different between the different strategy types. Hip flexion angle during slow walking and ankle dorsiflexion angle during fast walking were significantly different.
The correlation coefficients for the association between the change in the heel marker distance and the other parameters are shown in Table 2 and Fig. 3. During slow walking, the correlation coefficients for the step length and hip flexion angle were high (r = 0.84 and 0.78, respectively), and the correlation coefficient for the walking velocity showed a moderate value (r = 0.59). During fast walking, the correlation coefficients for the step length, ankle dorsiflexion angle, and plantarflexion angles showed moderate values (r = 0.42, 0.58 and 0.40, respectively).

Relationships between the change in the heel marker distance and postural parameters. Walking velocity (a slow, d fast); step length (b slow, e fast); hip flexion angle on the target side (c slow, f fast). The differences in the change in the heel marker distance according to perturbation are shown as triangles (wide or back step) and filled-in squares (narrow) in (a–c). The differences in the change in the heel marker distance according to perturbation are shown as filled-in squares (narrow) and diamonds (over) in (d–f)
4 Discussion
4.1 Difference in the Strategy Type for the Two Walking Conditions
Our results showed the difference in recovery from perturbation between both fast and slow walking conditions. During fast walking of a velocity almost near the maximum slip velocity, all participants got over the slip and kept walking. Walking stability is the ability to restore or maintain the upright posture without replacing the BoS while encountering a perturbation [17]. Our results indicated that the fast walking condition was stable than the slow walking condition, as the velocity during the fast walking condition was close to the speed with which the healthy young male adults were comfortable. The previous study stated that a faster walking velocity leads to greater angular momentum, which makes disturbance of stability due to external forces difficult [18]. In the fast walking condition, the forward velocity of the CoM may cancel the disturbance in the backward velocity of the CoM caused by the perturbation. During slow walking at a velocity less than the maximum slip velocity, most of the participants took wide steps or stepped backwards and stopped walking. Some participants kept walking. When walking at a slower speed, healthy individuals exhibit lower stepping stability [19]. For the healthy young male adults, the slow walking velocity in the present study was less than the velocity with which they were comfortable, thus, leading to instability during walking. The walking velocity was within the range of the maximum walking velocity of the elderly reported by the previous studies [14, 20].
4.2 Corrective Response and Postural Parameters
We classified the detailed corrective response by measuring the change in the heel marker distance and calculated the correlation coefficient for the postural parameters at the moment of perturbation. The correlation coefficients for the step length (r = 0.84, p < 0.01) and hip flexion angle (r = 0.78, p < 0.01) on the target side during slow walking were high. Therefore, large step length and the hip flexion angle correlated with the degree of corrective response only during slow walking. Our results showed that the stability during the double-support phase depends on the size of the BoS rather than the CoM position and velocity. During slip perturbation, the hip on the leading leg provides support and maintains the trunk in the upright position, regardless of the other factors [21]. During the first half of the double-support phase, the hip on the leading leg side contributes the most towards providing vertical support to the trunk [22]. Moreover, a significant torque is created by the region around the hip joints to counteract the moment of inertia of the trunk segment tilting backwards [17]. The leading leg landing forward sufficiently contributes to the prevention of a posterior trunk tilt because landing forward favorably constructs a more stable front part of the BoS, thus, making it easier to perform flexion torque around the hip joint [23, 24]. Thus, it is reasonable that the hip joint angle of the leading/slipping leg correlates most with the biomechanical parameters other than the step length. Walking has a tradeoff between stability and maneuverability. This has been proven by animal [25] and human studies [26]. As above mention, fast walking has high dynamic stability. On the other hand, slow walking decrease stability, but also increase better transition performance [19]. Therefore, the small difference in the postural parameters affecting the stance affected the large difference between the stop walking or keep walking responses.
5 Limitation
Our study has two main limitations. First, our findings are limited in their generalizability to other populations because of our study population being restricted to young male adult participants. However, we intentionally avoided factors of sex, age, and height to achieve our main purpose of revealing the pure relationship between walking velocity relative to the slip velocity and corrective response. Second, the participants' prediction for slip could cause proactive corrective response and influence our result. However, we randomized the slipping side to avoid a proactive corrective response. Moreover, the perturbation occurred only when the step positions satisfied the programming terms that the participants remained unaware of throughout the duration of the study. The participants walked 1 to 4 trials with no slip. As a result, these trials could act as false trials for each participant, which significantly decreases the likelihood of predicting and reacting to the perturbation.
6 Conclusion
Recently, advancements have been noted in the strategies for curing disease and disability, as well as increasing the life expectancy of elderly people. Physical therapists often assess the walking ability of elderly people to guide clinical decision-making for interventions to prevent falls and future disabilities. By identifying the primary factor or a combination of factors that contribute to a greater risk of falling, physical therapists can target interventions toward the underlying gait characteristics and biomechanical factors. Elderly people inevitably have reduced walking velocity [20, 27]. Elderly people with balance-related problems are significantly slower than their healthier peers [28]. Therefore, the unexpected slip perturbation velocity is expected to be greater than the walking velocity. Looking relationship between the walking and the slip velocity, one of the important points to preventing fall is possible to range of motion of the hip joint to secure a stable BoS for elderly people. However, experiment of elderly people is necessary actually.
Moreover, preventing slip and fall incidents on slippery surface (i.e. oil, water, ice, etc.) are necessary for industrial rehabilitation. However early research focused mainly on tribology, whereas research on gait/biomechanics studies are flourish recently [29]. Our results may provide a basically information to advise on walking and workwear design focusing on the hip joint to decrease the risk of falls at work.
Data Availability
The datasets generated and/or analyzed during the current study are available from the corresponding author on reasonable request.
Code Availability
The code generated and/or analyzed during the current study is available from the corresponding author upon reasonable request.
Software
MATLAB Version 2017b RRID:SCR_001622 and LabVIEW Version 2016 RRID:SCR_014325.
References
MacKinnon, C. D., & Winter, D. A. (1993). Control of whole body balance in the frontal plane during human walking. Journal of Biomechanics, 26(6), 633–644.
Pai, C. Y., & Patton, J. (1997). Center of mass velocity-position predictions for balance control. Journal of Biomechanics, 30(4), 347–354.
Hof, A. L., Gazendam, M. G., & Sinke, W. E. (2005). The condition for dynamic stability. Journal of Biomechanics, 38(1), 1–8. https://doi.org/10.1016/j.jbiomech.2004.03.025.
Hsue, B. J., Miller, F., & Su, F. C. (2009). The dynamic balance of the children with cerebral palsy and typical developing during gait Part II: Instantaneous velocity and acceleration of COM and COP and their relationship. Gait Posture, 29(3), 471–476. https://doi.org/10.1016/j.gaitpost.2008.11.008.
Yang, F., Anderson, F. C., & Pai, Y. C. (2008). Predicted threshold against backward balance loss following a slip in gait. Journal of Biomechanics, 41(9), 1823–1831. https://doi.org/10.1016/j.jbiomech.2008.04.005.
Yang, F., Bhatt, T., & Pai, Y. C. (2009). Role of stability and limb support in recovery against a fall following a novel slip induced in different daily activities. Journal of Biomechanics, 42(12), 1903–1908. https://doi.org/10.1016/j.jbiomech.2009.05.009.
Courtney, T. K., Sorock, G. S., Manning, D. P., Collins, J. W., & Holbein-Jenny, M. A. (2001). Occupational slip, trip, and fall-related injuries: Can the contribution of slipperiness be isolated? Ergonomics, 44(13), 1118–1137. https://doi.org/10.1080/00140130110085538.
Stevens, J. A., Corso, P. S., Finkelstein, E. A., & Miller, T. R. (2006). The costs of fatal and non-fatal falls among older adults. Injury Prevention: Journal of the International Society for Child and Adolescent Injury Prevention, 12(5), 290–295. https://doi.org/10.1136/ip.2005.011015.
Yang, F., & Pai, C. Y. (2013). Alteration in community-dwelling older adults' level walking following perturbation training. Journal of Biomechanics, 46(14), 2463–2468. https://doi.org/10.1016/j.jbiomech.2013.07.025.
Brady, R. A., Pavol, M. J., Owings, T. M., & Grabiner, M. D. (2000). Foot displacement but not velocity predicts the outcome of a slip induced in young subjects while walking. Journal of Biomechanics, 33, 803–808.
Hu, X., & Qu, X. (2013). Differentiating slip-induced falls from normal walking and successful recovery after slips using kinematic measures. Ergonomics, 56(5), 856–867. https://doi.org/10.1080/00140139.2013.776705.
McCrum, C., Willems, P., Karamanidis, K., & Meijer, K. (2019). Stability-normalised walking speed: A new approach for human gait perturbation research. Journal of Biomechanics, 87, 48–53. https://doi.org/10.1016/j.jbiomech.2019.02.016.
Ducharme, S. W., Sands, C. J., Moore, C. C., Aguiar, E. J., Hamill, J., & Tudor-Locke, C. (2018). Changes to gait speed and the walk ratio with rhythmic auditory cuing. Gait & Posture, 66, 255–259. https://doi.org/10.1016/j.gaitpost.2018.09.006.
Allin, L. J., Wu, X., Nussbaum, M. A., & Madigan, M. L. (2016). Falls resulting from a laboratory-induced slip occur at a higher rate among individuals who are obese. Journal of Biomechanics, 49(5), 678–683. https://doi.org/10.1016/j.jbiomech.2016.01.018.
Lee, H. J., & Chou, L. S. (2006). Detection of gait instability using the center of mass and center of pressure inclination angles. Archives of Physical Medicine and Rehabilitation, 87(4), 569–575. https://doi.org/10.1016/j.apmr.2005.11.033.
Yamaguchi, T., & Masani, K. (2016). Contribution of center of mass–center of pressure angle tangent to the required coefficient of friction in the sagittal plane during straight walking. Biotribology, 5, 16–22. https://doi.org/10.1016/j.biotri.2015.12.002.
Yang, F., Kim, J., & Yang, F. (2017). Effects of obesity on dynamic stability control during recovery from a treadmill-induced slip among young adults. Journal of Biomechanics, 53, 148–153. https://doi.org/10.1016/j.jbiomech.2017.01.021.
Lu, H. L., Lu, T. W., Lin, H. C., Hsieh, H. J., & Chan, W. P. (2017). Effects of belt speed on the body's center of mass motion relative to the center of pressure during treadmill walking. Gait & Posture, 51, 109–115. https://doi.org/10.1016/j.gaitpost.2016.09.030.
Hsieh, K. L., Sheehan, R. C., Wilken, J. M., & Dingwell, J. B. (2018). Healthy individuals are more maneuverable when walking slower while navigating a virtual obstacle course. Gait & Posture, 61, 466–472. https://doi.org/10.1016/j.gaitpost.2018.02.015.
Bohannan, R. W. (1997). Comfortable and maximum walking speed of adults aged 20–79 years: Reference values and determinants. Age and Ageing, 26(1), 15–19.
Moyer, B. E., Redfern, M. S., & Cham, R. (2009). Biomechanics of trailing leg response to slipping: Evidence of interlimb and intralimb coordination. Gait & Posture, 29(4), 565–570. https://doi.org/10.1016/j.gaitpost.2008.12.012.
Kepple, T. M., Siegel, K. L., & Stanhope, S. J. (1997). Relative contributions of the lower extremity joint moments to forward progression and support during gait. Gait & Posture, 6(1), 1–8.
Kuo, A. D., & Donelan, J. M. (2010). Dynamic principles of gait and their clinical implications. Physical Therapy, 90(2), 157–174. https://doi.org/10.2522/ptj.20090125.
Kuo, A. D. (2007). The six determinants of gait and the inverted pendulum analogy: A dynamic walking perspective. Human Movement Science, 26(4), 617–656. https://doi.org/10.1016/j.humov.2007.04.003.
Wynn, M. L., Clemente, C., Nasir, A. F., & Wilson, R. S. (2015). Running faster causes disaster: Trade-offs between speed, manoeuvrability and motor control when running around corners in northern quolls (Dasyurus hallucatus). Journal of Experimental Biology, 218(Pt 3), 433–439. https://doi.org/10.1242/jeb.111682.
Hak, L., Houdijk, H., Steenbrink, F., Mert, A., van der Wurff, P., Beek, P. J., et al. (2013). Stepping strategies for regulating gait adaptability and stability. Journal of Biomechanics, 46(5), 905–911. https://doi.org/10.1016/j.jbiomech.2012.12.017.
Prince, F., Corriveau, H., Hebert, R., & Winter, D. A. (1997). Gait in the elderly. Gait & Posture, 5, 128–135.
Wolfson, L., Whipple, R., Derby, C. A., Amerman, P., Murphy, T., Tobin, J. N., et al. (1992). A dynamic posturography study of balance in healthy elderly. Neurology, 42(11), 2069–2075. https://doi.org/10.1212/wnl.42.11.2069.
Lockhart, T. E. (2008). An integrated approach towards identifying age-related mechanisms of slip initiated falls. Journal of Electromyography and Kinesiology, 18(2), 205–217.
Acknowledgements
We thank Yurina Iizuka for assisting with the data collection.
Funding
This research did not receive any funding from any agencies in the public, commercial, or not-for-profit sectors.
Author information
Authors and Affiliations
Contributions
KH designed the study, and wrote the initial draft of the manuscript. KN contributed to analysis and interpretation of data, and assisted in the preparation of the manuscript. All other authors have contributed to data collection and interpretation, and critically reviewed the manuscript. All authors approved the final version of the manuscript, and agree to be accountable for all aspects of the work in ensuring that questions related to the accuracy or integrity of any part of the work are appropriately investigated and resolved.
Corresponding author
Ethics declarations
Conflicts of interest
There are no conflicts of interest, financial or otherwise, to declare.
Ethics Approval
This study and its protocols were approved by the Saitama Prefectural University Ethics Review Committee (No. 28821).
Consent to Participate
All participants provided written informed consent according to the guidelines of the Declaration of Helsinki before the start of the study.
Consent for Publication
Not applicable.
Rights and permissions
About this article

Cite this article
Hirata, K., Kokubun, T., Miyazawa, T. et al. Relationship Between the Walking Velocity Relative to the Slip Velocity and the Corrective Response. J. Med. Biol. Eng. 41, 25–33 (2021). https://doi.org/10.1007/s40846-020-00527-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40846-020-00527-6