
Abstract
In 1973, D. A. Hoffman proved that a complete immersed surface in \(\mathbb {S}^3\) with constant mean curvature \(H\ne 0\) and Gauss curvature which does not change sign must be a sphere or a flat torus. For the n-dimensional case with \(n\ge 3\), we prove that Hoffman’s theorem cannot be extended when we consider constant higher-order mean curvature \(H_r\), \(2\le r<n\), and Gauss–Kronecker curvature K, instead of the mean curvature H and Gauss curvature, respectively. More precisely, we show the existence of non-isoparametric hypersurfaces \(\Sigma \) in \(\mathbb {S}^{n+1}\), \(n\ge 3\), with constant higher-order mean curvature and whose Gauss–Kronecker curvature K does not change sign. Besides, we also derive estimates for the infimum and the supremum of the principal curvatures of a hypersurface with constant higher-order mean curvature.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction and Statement of the Results
The problem of characterizing surfaces immersed in a Riemannian 3-manifold with constant mean curvature (CMC) constitutes a classical theme into the theory of isometric immersions. There are several papers on classification results of constant mean curvature surfaces in different spaces such as space forms and, more generally, in homogeneous three-manifolds. See, for instance, [1, 6, 8] and references therein. In particular, Hoffman [11] characterized totally umbilical spheres and flat tori as the only complete surfaces immersed into the sphere \({\mathbb {S}}^3\) with constant mean curvature \(H\ne 0\) and whose Gaussian curvature does not change sign (see Appendix A):
Theorem 1
Let \(\Sigma \) be a complete surface immersed into the Euclidean sphere \({\mathbb {S}}^3\) with constant mean curvature \(H\ne 0\). Assume that \(\Sigma \) is not totally umbilical. If its Gaussian curvature K does not change sign, then \(K= 0\) and \(\Sigma \) is isometric to a flat torus \({\mathbb {S}}^1(\rho ) \times {\mathbb {S}}^1(\sqrt{1-\rho ^2}) \subset {\mathbb {S}}^3\), with radius \(0<\rho <1\).
A (connected) hypersurface in \({\mathbb {S}}^{n+1}\) is called isoparametric if its principal curvatures are constant functions (see, for instante, Chapter 3 in [9]). In particular, an isoparametric surface in \({\mathbb {S}}^3\) must be an open subset of a great or small sphere (totally umbilic) or a standard product of two circles (flat torus), see Section 3.8 in [9] about it based on the number of distinct principal curvatures. Then as an immediate consequence of Theorem 1, we obtain:
Theorem 2
Let \(\Sigma \) be a complete surface immersed into the Euclidean sphere \({\mathbb {S}}^3\) with constant mean curvature \(H\ne 0\). If its Gaussian curvature K does not change sign, then \(\Sigma \) is an isoparametric surface.
In higher dimension, Theorems 1 and 2 suggest a general result for the case of hypersurfaces with constant higher-order mean curvature \(H_r\) in the Euclidean sphere \({\mathbb {S}}^{n+1}\). We recall that if \(\Sigma \) is an oriented hypersurface in \({\mathbb {S}}^{n+1}\) with principal curvatures \(\kappa _1,\dots ,\kappa _n\) and \(1\le r\le n\), the r-th mean curvature \(H_r\) is defined as
When \(r=1\), \( nH_1= \sum _{i=1}^n \kappa _{i}\) is nothing but the mean curvature of \(\Sigma \), which is the main extrinsic curvature of \(\Sigma \). When \(r=2\), we obtain \(H_2=R-1\) where R is the normalized scalar curvature of \(\Sigma \), and for \(r=n\), we get the Gauss–Kronecker curvature, which is the product of the principal curvatures of the hypersurface and it is usually denoted by K (see Sect. 2 for more details).
In general, when r is odd, the sign of \(H_r\) depends on the chosen orientation. On the other hand, when r is even, its value does not depend on the chosen orientation. Moreover, the curvature \(H_r\) is intrinsic if r is even. In particular, the Gauss–Kronecker curvature K is intrinsic if n is even and intrinsic up to sign if n is odd (See [7, Exercise 1.9]). Inspired by Theorem 2, and since the Gauss curvature of a surface is an intrinsic object, we ask if it is possible to consider the Gauss–Kronecker curvature instead of the Gaussian curvature as follows.
Question 3
Let \(\Sigma \) be a complete oriented hypersurface in \({\mathbb {S}}^{n+1}\) (\(n \ge 3\)) with constant r-th mean curvature \(H_r \ne 0\) (\(2\le r< n\)). Suppose that its Gauss–Kronecker curvature K does not change sign. Is it true that \(\Sigma \) is an isoparametric hypersurface?
Let us observe that when the ambient space is the \((n+1)\)-dimensional Euclidean space \({\mathbb {R}}^{n+1}\) the answer is affirmative (see Theorem 3 in [6]) to hypersurfaces with two distinct principal curvatures, one of them being simple:
Theorem 4
Let \(n \ge 3\) and \(2\le r < n\). Let \(\Sigma \) be a complete hypersurface immersed into the Euclidean space \({\mathbb {R}}^{n+1}\) with constant r-th mean curvature \(H_r\ne 0\) and two distinct principal curvatures, one of them being simple. If its Gauss–Kronecker curvature K does not change sign, then \(K=0\) and \(\Sigma \) is isometric to a cylinder \({\mathbb {R}} \times {\mathbb {S}}^{n-1}(\rho ) \subset {\mathbb {R}}^{n+1}\) with radius \(\rho >0\).
The approach used by authors in [6] relies on the so-called principal curvature theorem due to B. Smyth and F. Xavier (see Section 1 in [14]). In the present note we give a negative answer to the Question 3, that is, Theorem 2 does not extend to hypersurfaces with constant higher-order mean curvature \(H_r\) in \({\mathbb {S}}^{n+1}\) and whose Gauss–Kronecker curvature K does not change sign. Specifically, we prove the following result.
Theorem 5
Let \(n\ge 3\) and \(2\le r< n\). Then for each \(H_r>0\), there exists a one-parameter family of complete non-isoparametric hypersurfaces \(\Sigma \) immersed in \({\mathbb {S}}^{n+1}\) with constant r-th mean curvature \(H_r \) and strictly negative Gauss–Kronecker curvature everywhere.
Corollary 6
For each \(R>1\), there exists a one-parameter family of complete non-isoparametric hypersurfaces \(\Sigma \) immersed in \({\mathbb {S}}^{n+1}\) (\(n\ge 3\)) with constant normalized scalar curvature R and strictly negative Gauss–Kronecker curvature everywhere.
On the other hand, it is well known that the hypersurfaces obtained from a standard product of two spheres are the only isoparametric hypersurfaces with two distinct principal curvatures \(\lambda _0\) and \(\mu _0\) with multiplicities \(n - m\) and m, respectively. In this case, the principal curvatures satisfy \(\lambda _0\mu _0+1=0\) and these hypersurfaces are also called the Clifford hypersurfaces
where \(s^2+t^2 =1\) [2, 17]. Here, the value within the parentheses denotes the radius of the corresponding sphere. In this case
In particular, if \(m=1\) we obtain
where \(\lambda _0\) satisfies the identity \(nH_r=(n-r)\lambda _0^{r} -r \lambda _0^{r-2} \), see also equation (17) below.
As an application of a result on the principal curvatures of a hypersurface given by Smyth [22], following similar steps and ideas of the proof of Theorem 3 in [6], we also prove the following result.
Theorem 7
Let \(n\ge 3\) and \(2\le r< n\). For a given constant \(H_r>0\), let \(\lambda _0\) be the positive solution of
Let \(\Sigma \) be a complete oriented hypersurface in \({\mathbb {S}}^{n+1}\) with constant r-th mean curvature \(H_r\) and two distinct principal curvatures \(\lambda \) and \(\mu \) with multiplicities \((n-1)\) and 1, respectively. If r is even, the orientation of \(\Sigma \) is chosen so that \(\lambda >0\). Otherwise, in the case where r is odd, assume further that \(\lambda >0\). Then
Under the hypothesis of our Theorem 7, we will see in Sect. 2 that \(\lambda (p)\ne 0\) for every \(p\in \Sigma \). On the other hand, when \(r=2\) we have \(H_2=R-1\), where R is the normalized scalar curvature. Then, the first equation of (2) reduces to
It follows that the isoparametric hypersurface \(\Sigma _{n-1,1}\) given by (1) has principal curvatures
Thus, as a direct application of Theorem 7, we obtain the following consequence.
Corollary 8
Let \(\Sigma ^n\) be a complete oriented hypersurface in \({\mathbb {S}}^{n+1}\) (\(n\ge 3\)) with constant normalized scalar curvature \(R> 1\) and having two distinct principal curvatures, one of them being simple. Then
where |A| is the norm of the second fundamental form of \(\Sigma \).
The estimate (4) is the right inequality of (8) in [16, Theorem 1.6]. When the inequality (4) is written in terms of the total umbilicity tensor, then it agrees with the estimate given by Alías, García-Martínez and Rigoli in [4, Theorem 2]. Indeed, if \(\Phi =A-HI\), with I the identity operator on \(T\Sigma \). Then, \(\textrm{tr}(\Phi )=0\) and \( |\Phi |^2=\textrm{tr}(\Phi ^2)=|A|^2-nH^2\ge 0.\) It follows from (7) that
Hence, (4) becomes
In Corollary 8, we assume that \(\Sigma \) has two different principal curvatures, one of them simple, and the estimate in [4] holds for more general complete hypersurfaces. However, it is worth pointing out that we obtained this estimate using a completely different technique.
2 Preliminary Results
Let \({\mathbb {S}}^{n+1}\) denote the Euclidean unit sphere
Let \(\Sigma \) be an orientable and connected hypersurface isometrically immersed into \({\mathbb {S}}^{n+1}\). Choose a unit normal field N along \(\Sigma \) and we let A denote the second fundamental tensor of the immersion, i.e., \( {\langle AX ,Y \rangle } = {\langle {\overline{\nabla }}_X Y ,N \rangle }\) for every \(X,Y\in {\mathfrak {X}}(\Sigma ), \) where \({\overline{\nabla }}\) is the connection of \({\mathbb {S}}^{n+1}\). The relation between the curvature tensor of \(\Sigma \) and the curvature of \(\mathbb {S}^{n+1}\) is expressed via the Gauss equation, which can be written in terms of A in the form
for every \(X,Y,Z\in {\mathfrak {X}}(\Sigma )\). In particular, the Ricci and the scalar curvatures of the hypersurface are given by
where \(H=\frac{1}{n}{\text {Tr}}(A)\) is the mean curvature of \(\Sigma \), and
respectively. Here, R is the normalized scalar curvature.
If \(\kappa _1,\ldots , \kappa _n\) are the principal curvatures of \(\Sigma \), the r-th mean curvature \(H_r\) of the hypersurface is defined by
In particular, when \(r=n\) we obtain the Gauss–Kronecker curvature of \(\Sigma \)
Henceforth, we consider hypersurfaces with two distinct principal curvatures \(\lambda \) and \(\mu \), with multiplicities \(n-1\) and 1, respectively. Then, the r-th mean curvature can be written as
Remark 9
It follows from do Carmo and Dajczer [10, Theorem 4.2] that a hypersurface of \({\mathbb {S}}^{n+1}\) with constant r-th mean curvature \(H_r\) (\(2\le r< n\)) and two distinct principal curvatures, with multiplicities \(n-1\) and 1, is contained in a rotation hypersurface.
The Gauss–Kronecker curvature of \(\Sigma \) is
Note that if \(H_r\ne 0\) and \(r\ge 2\), then from (8) we obtain that the principal curvature \(\lambda \) does not vanish on \(\Sigma \) and the principal curvature \(\mu \) can be written in terms of \(\lambda \) as
From here on we suppose that \(H_r > 0\), with \(2 \le r <n\). When \(r=2\), we have from (7) and (8) that \(H_2=R-1\). Then, (8) and (9) reduce to
and
respectively. For the proof of our results, we need the following auxiliar result (see Lemma 10 in [6]).
Lemma 10
Let \(H_r>0\), with \(r\ge 2\), \(\lambda >0\). Then
-
(a)
The function \(\mu (\lambda )\) given by (9) is decreasing on \((0,\infty )\).
-
(b)
The only positive root of the equation \(\mu (\lambda )=0\) is given by
$$\begin{aligned} {\hat{\lambda }}=\left( \frac{nH_r}{n-r}\right) ^{1/r}. \end{aligned}$$(10) -
(c)
\(\mu (\lambda )=\lambda \) if and only if \(\lambda =\mu =H_r^{1/r}\).
In order to prove our results, we will consider connected rotational hypersurfaces in the Euclidean sphere with constant higher-order mean curvature. We first recall their definition and some basic properties.
It follows from [10, Section 2] that any complete rotation hypersurface \(\Sigma \) with respect to the geodesic \(\gamma (s)=( 0, \ldots , 0,\cos s, \sin s) \in {\mathbb {S}}^{n+1}\) is given by an immersion \(\phi : {\mathbb {S}}^{n-1} \times {\mathbb {R}} \rightarrow {\mathbb {S}}^{n+1}\) defined by
where \(y\in {\mathbb {S}}^{n-1}\), \(\rho : {\mathbb {R}}\rightarrow (0,1)\) is a differentiable function that satisfies \(\rho ^2+{\dot{\rho }}^2\le 1\) and
The profile curve of \(\Sigma \) is
In this paper we consider the projection of the profile curve over the unit disk \(x_{n+1}^2 + x_{n+2}^2 \le 1\). If \(\rho (t)=\sin t\) we obtain a totally geodesic sphere \({\mathbb {S}}^{n} \subset {\mathbb {S}}^{n+1}\) given by \(\phi (y,t) = \left( y\sin t, \cos t, 0\right) \). However, we will omit totally umbilical spheres. See also [20] for more explicit formulas on immersions of hypersurfaces in Riemannian and semi-Riemannian manifolds. In [10, Proposition 3.2], do Carmo and Dajczer calculated the principal curvatures of \(\Sigma \),
of multiplicities \((n-1)\) and 1, respectively. Let us observe that if \(0<\rho _0<1\) is constant, then the profile curve is a circle centered at the origin and the principal curvatures of \(\Sigma \) are constant, that is, \(\Sigma \) is defined by
where \(\displaystyle { \theta (s)= \frac{s}{\sqrt{1-\rho ^2_0}}}.\) In this case notice that \(\Sigma = {\mathbb {S}}^{n-1}(\rho _0) \times {\mathbb {S}}^1 (\sqrt{1-\rho _0^2})\).
From (8) and (13), we obtain that the function \(\rho \) must satisfy the differential equation
Taking into account that \(H_r\) is constant, we may multiplying (14) by \(\rho ^{n-r-1}\) and integrating to obtain the function
for some a constant C, see [18, Proposition 2]. Because of the form of the principal curvatures in (13), we are interested only in the behavior of G in the region \(\rho ^2+{\dot{\rho }}^2< 1\), with \(\rho >0\).
From Lemma 2.7, Lemma 3.1 and Proposition 3.2 of [16] we have the function G has only one critical point of the form \((\rho _0,0)\), for which
Moreover, \(C_0:=G(\rho _0,0)>0\) is a local maximum and for each \(0<C<C_0\) the level set \(G(\rho ,{\dot{\rho }})=C\) is a closed curve surrounding \((\rho _0,0)\) and contained in the region interior to the zero level set of G.
3 Key Lemmas
Notice that the critical point \((\rho _0,0)\) of G corresponds to an isoparametric hypersurface
Hence, \(\lambda _0=\frac{1}{x_0}\) and (16) is equivalent to
Translating the above properties of G into the corresponding rotational hypersurfaces, we have the following key lemma.
Lemma 11
Let \(H_r>0\). Then for every \(C\in (0,C_0]\), the level curve \(G(\rho ,{{\dot{\rho }}})=C\) is totally contained in the region \(\rho ^2+{\dot{\rho }}^2<1\), and gives rise to a complete hypersurface \(\Sigma \).
Theorem 7 will be an application of a result given by Smyth in [22]. This result gives geometric information on the principal curvatures of a complete hypersurface immersed in the unit sphere. For each complete and orientable hypersurface \(\Sigma \) in \({\mathbb {S}}^{n+1}\) oriented by a normal field N to \(\Sigma \) and with associated second fundamental form A, we set
calling it the principal curvature set of \(\Sigma \). Let \(\Lambda ^{\pm } = \Lambda \cap {\mathbb {R}}^{\pm }\). When \(\Lambda ^{\pm }\) are both non-empty we set
For the sake of completeness and for the readers’ convenience, we state Smyth’s result.
Lemma 12
(B. Smyth in [22]). Let \(f: \Sigma ^n \rightarrow {\mathbb {S}}^{n+1} \) be a complete immersed orientable hypersurface in the unit sphere which is not totally geodesic.
-
(i)
If \(\Lambda ^+\) or \(\Lambda ^-\) is empty, then \(\Lambda \) is connected, \(\Sigma ^n\) is diffeomorphic to \({\mathbb {S}}^n\) and f embeds \(\Sigma ^n\) as the boundary of a convex domain in a closed hemisphere.
-
(ii)
If \(\Lambda ^{\pm }\) are both non-empty, then in the double inequality
$$\begin{aligned} \alpha \beta \le -1 \le ab, \end{aligned}$$the left-hand inequality fails if and only if f is parallel to such a hypersurface as described in i), while the right-hand inequality fails only if f immerses \(\Sigma ^n\) as a totally geodesic sphere bundle over a complete even-dimensional submanifold of \({\mathbb {S}}^{n+1}\), in which case \(\# \Lambda \) is odd \(\ge 3\).
Here, \(\# \Lambda \) is the number of connected components of \(\Lambda \). There is a similar result for complete orientable hypersurfaces in the Euclidean space [14] and some applications in [3, 5, 13].
4 Proof of Theorem 7
The proof follows similar steps and ideas of the proof of Theorem 3 in [6]. First of all note that \(\lambda (p)\ne {H_r}^{1/r}\) for every \(p\in \Sigma \). In fact, if \(\lambda (p_0)= {H_r}^{1/r}\) at a point \(p_0\in \Sigma \) then we would have from Lemma 10 that
which contradicts that \(\Sigma \) has two distinct principal curvatures. From continuity of \(\lambda \) and connectedness of \(\Sigma \), it follows that either
or
Let us first see that case (18) cannot happen. In this case, it follows from Lemma 10 that
Hence, \(\Lambda ^- =\emptyset \). Thus, Lemma 12 (i) implies that \(\Lambda \) is connected and \(\Sigma \) is diffeomorphic to a sphere \({\mathbb {S}}^n\). In particular, \(\Sigma \) is compact and we can consider
From the compactness of \(\Sigma \) and from (20), we obtain that \([\lambda _*, \lambda ^*]\) and \([\mu _*, \mu ^*]\) are disjoint. Thus,
is disconnected, with \(\Lambda ^{-}=\emptyset \). But this contradicts Lemma 12 (i). Hence, the case (18) cannot happen. As a consequence, we have that \({H_r}^{1/r} < \lambda (p)\) for every \(p\in \Sigma \). It follows that
Hence, by taking the infimum and supremum of \(\lambda \) and \(\mu \), respectively, we get
We claim that \({\hat{\lambda }} =\left( \frac{nH_r}{n-r}\right) ^{1/r}< \sup _\Sigma \lambda \). Otherwise, we suppose that
From (9), it follows that
Thus, we have that \(\Lambda ^- =\emptyset \). Again by Lemma 12 (i) implies that \(\Lambda \) is connected and \(\Sigma \) is compact. Then
Therefore, the principal curvature set \( \Lambda =[\mu _*, \mu ^*]\cup [\lambda _*, \lambda ^*]\) is disconnected, which is again a contradiction. Hence, \({\hat{\lambda }} < \sup _\Sigma \lambda \). It implies that
See Fig. 2. So far we have
We claim that
Let us assume that \(\alpha \beta > -1\) and derive a contradiction. If the inequality of (23) fails, by Lemma 12, \(\Sigma \) is parallel to a hypersurface \({\overline{M}}\) such that the set \(\Lambda ^{{\overline{M}}}\) is connected. Then, since the number of connected components is the same for parallel hypersurfaces, \(\Lambda ^\Sigma \) would also be connected. But this is a contradiction, because from (21) we see that \(\Lambda ^\Sigma \) has 2 connected components. It follows from (9) and (22) that
where \(\lambda ^*=\sup _\Sigma \lambda \). Hence
Finally, using Lemma 10 we obtain \(\inf _\Sigma \mu = \mu _* \le \mu _0<0\). This finishes the proof of Theorem 7.
5 Proof of Theorem 5
Let \(H_r>0\). Let \(\Sigma \) be a rotational hypersurface with constant r-th mean curvature \(H_r\) corresponding to the level curve
where \(C_0=G(\rho _0, 0)\) and \(\rho _0\) is given by (16). By Lemma 11, \(\Sigma \) is a complete hypersurface and its corresponding level curve surrounds the critical point \((\rho _0,0)\). Notice that the principal curvatures of the isoparametric hypersurface associated to the critical point \((\rho _0,0)\) are given by
of multiplicities \((n - 1)\) and 1, respectively.
For the level curve \(G(\rho ,{\dot{\rho }})=C\), the coordinate \(\rho \) varies in the compact interval \([\rho _{\min }, \rho _{\max }]\) where
See Fig. 1. Therefore, for all C sufficiently close to \(C_0\), the level curve \(G=C\) cross the \(\rho \)-axis at the points \((\rho _{\max },0)\) and \((\rho _{\min },0)\). On the other hand, using (13) and (15), we can write the principal curvature \(\lambda \) as

Level curves of G in the \(\rho {\dot{\rho }}\)-plane

Graph of the function \(\mu (\lambda ) = \frac{nH_r}{r \lambda ^{r-1}} - \frac{n-r}{r}\lambda \) for \(H_r>0\)
Thus, by the monotony and continuity of \(\lambda \) relative to \(\rho \), \(\lambda (\rho , C)\) attains its extreme values at the leftmost and rightmost point of the level curve, that is,
From (13) the values of \(\lambda \) at these points are
On the other hand, by (25), we have that \(\lambda _0 \in [\lambda _*, \lambda ^*]\). It is worth pointing out that \({\hat{\lambda }} < \lambda _0\). Indeed, from (16) we find out that \(nH_r x_0^r -(n-r) <0\). This implies that
From (10) and (24), this is equivalent to \({\hat{\lambda }} < \lambda _0\). Hence by continuity of \(\lambda =\lambda (\rho , C)\), for C close enough to \(C_0\) with \(0<C<C_0\), the associated hypersurface satisfies
Then \(0<{\hat{\lambda }} < \lambda (p)\) for every \(p \in \Sigma \). Using Lemma 10, we obtain \(\mu < 0\) on \(\Sigma \). Therefore, the Gauss–Kronecker curvature \(K= \lambda ^{n-1} \mu \) is also negative on \(\Sigma \). Moreover, since the associated level curve is not reduced to a point, the principal curvatures are not constant and hence the hypersurface is not isoparametric.

On the left we have the profile curve of \(\Sigma \). On the right we have the graph of its principal curvature \(\lambda (t)\)
6 Numerical Experiments
In this short section, we will pick some values for C to show the trace of the profile curve of some explicit examples of rotational hypersurfaces with constant scalar curvature in \({\mathbb {S}}^4\). We took \(R=2\) (\(H_2=1\)). See also [19] and [21, Section 4] for other numerical examples.
Example 13
By the intermediate value theorem, there is a value of C near \({\tilde{C}}=0.15458\) such that the solution \(\rho (t)=\rho _C(t)\) of the differential equation (15) has period \(T=T_C\) near to \({\tilde{T}}=2.48753\). Here,
In fact, using Mathematica software we find the values \(0<C_1,C_2< C_0\) such that
and satisfy
for some constants \(T_{C_1}\), \(T_{C_2}\). Hence, the hypersurface \(\Sigma \) is defined by the value of C such that \(C_1<C<C_2\) and the function \(\theta (t)\) satisfies
Observe that the condition on C in (27) guarantees that the associated immersion \(\phi \) satisfies
The profile curve \((\sqrt{1-\rho (t)^2} \, \cos \theta (t), \sqrt{1-\rho (t)^2} \, \sin \theta (t) )\) is given in Fig. 3. The red piece represent the curve when t moves from 0 to T. Notice that the profile curve is closed and the immersion \(\phi : {\mathbb {S}}^{2} \times {\mathbb {R}} \rightarrow {\mathbb {S}}^{4}\) given by
has period 5T. It follows that the hypersurface defined by (28) is compact.

The first picture shows the profile curve of \(\Sigma \subset {\mathbb {S}}^{4} \) when \(H_2=1\) and \({\tilde{C}}=0.0531\). The second picture shows the profile curve when \(H_2=1\) and \({\tilde{C}}=0.2213\)

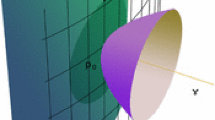
Profile curve of \(\Sigma \subset {\mathbb {S}}^{4} \) when \(H_2=1\) and \({\tilde{C}}=0.26345201\)
In Fig. 3, we also have the graph of the principal curvature \(\lambda \). The horizontal green line is
From the function \(\mu (\lambda ) = \frac{3}{2\lambda } - \frac{\lambda }{2}\), it follows that the Gauss–Kronecker curvature \(K=\lambda ^{n-1}\mu \) takes positive and negative values.
Other similar examples are given in Figure 4. On the other hand, Fig. 5 shows a profile curve with \(K <0\) on \(\Sigma \). The last hypersurface belongs to the one-parameter family given in Theorem 5. In this case note that the value of \({\tilde{C}}\) is close to
Data availability
Not applicable.
References
Alencar, H., do Carmo, M.: Hypersurfaces with constant mean curvature in spheres. Proc. Am. Math. Soc., 120(4), 1223–1229 (1994)
Alías, L. J., Jr. Aldir, B., Perdomo, O.: A characterization of quadric constant mean curvature hypersurfaces of spheres. J. Geom. Anal., 18(3), 687–703 (2008)
Alías, L.J., García-Martínez, S.C.: An estimate for the scalar curvature of constant mean curvature hypersurfaces in space forms. Geom. Dedicata 156, 31–47 (2012)
Alías, L.J., García-Martínez, S.C., Rigoli, M.: A maximum principle for hypersurfaces with constant scalar curvature and applications. Ann. Glob. Anal. Geom. 41, 307–320 (2012)
Alías, L.J., Meléndez, J.: Hypersurfaces with constant higher order mean curvature in Euclidean space. Geom. Dedicata 182, 117–131 (2016)
Alías, L.J., Meléndez, J.: Remarks on hypersurfaces with constant higher order mean curvature in Euclidean space. Geom. Dedicata 199, 273–280 (2019)
Dajczer, M., Tojeiro, R.: Submanifold theory. Beyond an introduction. Universitext. Springer, New York. xx+628 pp (2019)
Espinar, J., Rosenberg, H.: Complete constant mean curvature surfaces in homogeneous spaces. Comment. Math. Helv. 86, 659–674 (2011)
Cecil, T.E., Ryan, P.J.: Geometry of Hypersurfaces. Springer, New York, xi+596 (2015)
do Carmo, M., Dajczer, M.: Rotation hypersurfaces in spaces of constant curvature. Trans. AMS 277(2), 685–709 (1983)
Hoffman, D.A.: Surfaces of constant mean curvature in manifolds of constant curvature. J. Differ. Geom. 8, 161–176 (1973)
Klotz, T., Osserman, R.: Complete surfaces in \(E^3\) with constant mean curvature. Comment. Math. Helv. 41, 313–318 (1966/1967)
Núñez, R.A.: On complete hypersurfaces with constant mean and scalar curvatures in Euclidean spaces. Proc. Am. Math. Soc. 145(6), 2677–2688 (2017)
Smyth, B., Xavier, F.: Efimov’s theorem in dimension greater than two. Invent. Math. 90, 443–450 (1987)
Manzano, J.M., Torralbo, F., Van der Veken, J.: Parallel Mean Curvature Surfaces in Four-Dimensional Homogeneous Spaces, Proceedings Book of International Workshop on Theory of Submanifolds (Volume: 1 (2016)) June 2–4. Istanbul, Turkey (2016)
Meléndez, J., Palmas, O.: Hypersurfaces with constant higher order mean curvature in space forms. Differ. Geom. Appl. 51, 15–32 (2017)
Min, S.-H., Seo, K.: A characterization of Clifford hypersurfaces among embedded constant mean curvature hypersurfaces in a unit sphere. Math. Res. Lett. 24(2), 503–534 (2017)
Palmas, O.: Complete rotational hypersurfaces with \(H_r\) constant in space forms. Bull. Braz. Math. Soc. 30(2), 139–161 (1999)
Perdomo, O.M.: Embedded constant mean curvature hypersurfaces on spheres. Asian J. Math. 14(1), 73–108 (2010)
Perdomo, O.M.: CMC hypersurfaces on Riemannian and semi-Riemannian manifolds. Math. Phys. Anal. Geom. 15(1), 17–37 (2012)
Perdomo, O.M.: Spectrum of the Laplacian and the Jacobi operator on rotational CMC hypersurfaces of spheres. Pacific J. Math. 308(2), 419–433 (2020)
Smyth, B.: Efimov’s inequality and other inequalities in a sphere. Geometry and topology of submanifolds, IV (Leuven,: 76–86, p. 1992. World Sci. Publ, River Edge, NJ (1991)
Acknowledgements
The author would like to thank the referee for reading the manuscript in great detail and giving several valuable suggestions and useful comments which improved the paper. The author was partially supported by programa especial de apoyo a proyectos de docencia e investigación de la UAM: “Ecuaciones diferenciales y geometría diferencial con aplicaciones a las ciencias.”
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that he has no conflict of interest.
Additional information
Communicated by Pablo Mira.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
About Theorem 1
About Theorem 1
In this appendix, we obtain Theorem 1 from [11, Theorem 4.1]. Let \(\Sigma ^n\) and \({\overline{M}}^{n+k} \) be Riemannian manifolds of dimension n and \(n + k\), respectively. Throughout the Appendix we use \(\Sigma ^n \hookrightarrow {\overline{M}}^{n+k}\) to denote an isometric immersion of \(\Sigma \) in \({\overline{M}}.\)
Remember that the Gauss formula of \(\Sigma ^n \hookrightarrow {\overline{M}}^{n+k}\) is
which is valid for all \(X,Y \in {\mathfrak {X}}(\Sigma )\). Here, \(\nabla , {\overline{\nabla }}\) are the Riemannian connections of \(\Sigma ^n\) and \({\overline{M}}^{n+k}\), respectively, and B is the second fundamental form of \(\Sigma \). The mean curvature vector field \(\textbf{H}\in {\mathfrak {X}}^\perp (\Sigma )\) of \(\Sigma ^n\) in \({\overline{M}}\) is given by
where \(\{e_1,\dots ,e_n\}\) is a local orthonormal frame on \(\Sigma \).
Definition 14
An isometric immersion \(\Sigma ^n \hookrightarrow {\overline{M}}^{n+k}\) is said to have parallel mean curvature if \(\textbf{H}\) is parallel in the normal bundle, i.e., \({\overline{\nabla }}^\perp \textbf{H} =0\).
Remark 15
The following properties follow directly from the definition:
-
1.
If \(\textbf{H}\) is parallel, then \(\vert \textbf{H} \vert \) is constant.
-
2.
If \(\textbf{H}\ne 0\), \(\textbf{H}\) is parallel if and only if \(\vert \textbf{H}\vert \) is constant and \(\textbf{H}/\vert \textbf{H}\vert \) is parallel.
-
3.
If the codimension \(k=1\), \(\textbf{H}\) is parallel if and only if \(\vert \textbf{H} \vert \) is constant.
Now we consider a surface \(\Sigma ^2\) isometrically immersed in \({\overline{M}}^4(c)\), a 4-manifold with constant sectional cuavature c.
Theorem 16
(Theorem 4.1 in [11]). A complete immersed surface \(\Sigma ^2 \hookrightarrow {\overline{M}}^4(c)\), \(c\ge 0\), with parallel mean curvature and Gauss curvature K which does not change sign must be minimal (\(\textbf{H}\equiv 0\)), a sphere of radius \((\vert \textbf{H} \vert ^2 + c)^{-\frac{1}{2}} \) or a product of circles \({\mathbb {S}}^1(s) \times {\mathbb {S}}^1(t)\), \(0<s \le \infty \), \(0< t < \infty \), with the standard product immersion.
Remark 17
In particular, consider the immersion \(\Sigma ^2 \hookrightarrow {\mathbb {S}}^4\) with parallel mean curvature \(\textbf{H} \ne 0\). If \(\Sigma \) is not totally umbilical and its Gaussian curvature K does not change sign, then \(K=0\) and \(\Sigma \) must be a product of circles \({\mathbb {S}}^1(s) \times {\mathbb {S}}^1(t)\), \(s^2+t^2=1\).
We first look at a surface \(\Sigma ^2\) isometrically immersed in\({\mathbb {S}}^3\). Then, we use the canonical embedding of \({\mathbb {S}}^3\) in \({\mathbb {S}}^4\) to obtain the immersion of \(\Sigma \) in \({\mathbb {S}}^4\). It is well known that \( {\mathbb {S}}^3\) is totally geodesic submanifold of \({\mathbb {S}}^4\), that is, their Riemannian connections coincide. Let \(A =\{e_1, e_2, e_3, e_4\}\) be an adapted frame to \(\Sigma \) (in \({\mathbb {S}}^4\)) such that
Then, the mean curvature vector field of \(\Sigma \hookrightarrow {\mathbb {S}}^4\) is given by
where \(\lambda _{ij}^\alpha = \langle B(e_i,e_j), e_\alpha \rangle \), \(\alpha =3,4\), and B is the second fundamental form of the immersion \(\Sigma \hookrightarrow {\mathbb {S}}^4\).
Now suppose that the immersion \(\Sigma \hookrightarrow {\mathbb {S}}^3\) has constant nonzero mean curvature. In view of Theorem 16 (see also Remark 17), it is sufficient to show that \(\textbf{H}\) is parallel (see also Section 3 in [15] for more general cases). Let
where \(B_\Sigma ^{{\mathbb {S}}^3}\) is the second fundamental form of \(\Sigma \hookrightarrow {\mathbb {S}}^3\). One can check directly that

for \(X,Y \in T\Sigma \). It follows that
On the other hand, since \( B_\Sigma ^{{\mathbb {S}}^3} \in T {\mathbb {S}}^3 \) and \(e_4 \in T^\perp {\mathbb {S}}^3\) we get that
Thus, (29) reduces to
From this we notice that \(\vert \textbf{H}\vert = \vert H\vert \) is also constant. Furthermore, since \(\textbf{H} \in T {\mathbb {S}}^4\) and \({\mathbb {S}}^3\) is a totally geodesic submanifold of \({\mathbb {S}}^4\),
Thus, the immersion \(\Sigma ^2 \hookrightarrow {\mathbb {S}}^{4}\) has parallel mean curvature \(\textbf{H}\ne 0\).
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Meléndez, J. Remarks on Hypersurfaces in a Unit Sphere. Bull. Malays. Math. Sci. Soc. 46, 168 (2023). https://doi.org/10.1007/s40840-023-01565-4
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40840-023-01565-4
Keywords
- Hypersurface
- Higher-order mean curvature
- Scalar curvature
- Gauss–Kronecker curvature
- Isoparametric
- Second fundamental form