
Abstract
The use of variable speed drives in industries introduces harmonics that should be attenuated so as to improve the power quality. To overcome the shortcomings of the traditional passive filters in electric power system, shunt active power line conditioners (APLC) are employed. The regulation of DC capacitor voltage plays a vital role in deciding the performance of shunt APLC. Several intelligent controllers have been developed for the voltage control; however, due to high uncertainties associated with the electric power system, an interval type-2 fuzzy logic controller (IT2 FLC) is proposed. This work compares IT2 FLC, type-1 fuzzy-tuned proportional integral (PI) controller, and their performances are assessed with reference to conventional PI controller using MATLAB. Thus, the paper deals with the investigation of three-level Multi-Level Inverter which is used as shunt APLC in high-power applications using a fuzzy logic scheme.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Electrical power is an important one in our day-to-day activities, and subsequently, power quality is becoming a crucial concern due to the increased use of variable speed drives in the industrial environment. The harmonics produced by these nonlinear loads have serious effects on adjacent loads connected to the bus. To overcome the above-mentioned shortcomings, customized passive filters are normally used. However, there are few limitations with the incorporation of passive filters namely huge size, series or parallel resonance with the system impedance and harmonic compensation only for tuned frequency [1, 2].
Active power filter (APF) also known as active power line conditioner (APLC) is a vital component that eliminates the harmonics generated due to loads with nonlinear characteristics. Active power line conditioners are classified into (a) series APLC which is used for compensating voltage harmonics, (b) shunt APLC which compensates current harmonics and (c) hybrid APLC which incorporates both active and passive filters. The proposed work uses shunt APLC for compensating current harmonics generated by diode bridge rectifier and controlled rectifier which is used at the front end of many electrical drives [3].
A model predictive current controller for shunt active power filter was designed and developed by Al-Othman et al., and its performance was confirmed through simulation and experimental results [4]. A new method of harmonic measurement with mean value module was presented by Mindykowskiet et al. in ship propulsion systems using shunt APF [5]. To maintain the power factor closer to unity, a hybrid circuit with active power filtering and power factor correction was proposed by Xu et al. for marine electric network [6]. To improve power quality, a shunt APF with SRF controller was proposed and implemented by Karuppanan et al. [7]. Recently, the induction motor drives are operated at high voltage level which necessitates the utilization of APLC in high-voltage system. Conventional three-phase voltage source inverter (VSI) used in two-level APLC is suitable only for low-voltage applications due to reverse rating constraints pertaining to semiconductor switch. Hence MLI-based APLC is considered as an appropriate choice for medium- and high-voltage applications. Cascaded H-bridge-type MLI is used in this paper due to its modular structure compared to diode clamped and flying capacitor type. The application of cascaded MLI as static compensator for medium-voltage applications has been addressed by Akagi et al. [8].
A five-level MLI-based APF with hybrid frame current controller that can be directly connected to power line was proposed by Zhou et al. [9]. The voltage and current harmonics were compensated using a series APF and shunt passive filters with an interfaced photovoltaic and battery unit [10]. Different control techniques have been developed for reference current generation and capacitor DC voltage regulation which decides the compensation performance of shunt APLC. Here instantaneous active and reactive current (Id − Iq) control strategy is employed for reference current generation due to its reliable performance in steady-state and dynamic conditions. Also, its simple computation enables easy implementation to real-time applications.
For DC voltage regulation, PI controllers are normally used. However, they do not give satisfactory outcomes under transient conditions. In addition, for optimal operation, PI controller needs an accurate mathematical model; however, the electric power system is a highly nonlinear one. Consequently, several intelligent controllers were presented in the literature for DC capacitor voltage regulation [11,12,13,14,15,16]. A PI and fuzzy logic controller used for the supervision of capacitor DC-link voltage has been presented by Karuppanan et al. [17]. Suresh Mikkili et al. analyzed the performance of shunt APF with PI and fuzzy logic controller under dynamic conditions [18]. To limit the large number of fuzzy rules and fuzzy set used in Mamdani-type fuzzy logic controller, Bhende et al. proposed the use of Takagi-Sugeno-type fuzzy logic controller for shunt active power filter (SAPF) [19]. A strict feedback nonlinear system with unidentified nonlinear functions and cost function was contemplated by Kangkang Sun et al. He designed fuzzy adaptive state observer and obtained the unmeasured states. The simulation results obtained reveal that all signals in the closed-loop system are bounded, and the reference signal can also be tracked by the system output [20]. A single-phase AC to DC three-level converter with PI, fuzzy and fuzzy-tuned PI controllers were implemented using Xilinx Spartan-6 FPGA board by Gnanavadivel et al. [21]. An optimal decentralized fuzzy adaptive control scheme was suggested by Kangkang Sun et al. for interconnected large-scale nonlinear systems in strict feedback form. Moreover, the simulation result shows that there is suitable tracking of reference signal by output [22].
Zadeh proposed the concept of type-2 fuzzy PI controller in 1975 [23]. Dongrui Wu et al. explained theoretically how type-2 fuzzy PI controller handles system with nonlinearity more robust compared to type-1 fuzzy PI controller [24]. Mohammad El-Bardini et al. proved that the performance of direct adaptive IT2 fuzzy logic controller is better compared to IT2 fuzzy logic controller for multivariable anesthesia system with lots of uncertainties due to large deviations in the patient’s parameters [25]. For a system with lot of uncertainties like our electric power system, IT2 FLC gives better results. The proposed work uses IT2 FLC which can potentially yield better results compared to traditional PI and fuzzy-tuned PI controller.
Gating signal generation is another important aspect of MLI-based shunt APLC. D.G. Holmes et al. explained how harmonics can be eliminated in multi-level inverters by properly phase shifting the carrier waves [26]. There are several carrier-based PWM techniques available for multi-level inverters [27,28,29,30]. The proposed work utilizes level-shifted carrier PWM technique for pulse generation due to its ease of implementation.
In this paper, three-level cascaded H-bridge MLI is used as a shunt APLC for effective current compensation in harmonic imposed electric power network. For reference, current extraction Id − Iq (active and reactive current) theory is used and capacitor DC voltage regulation is done using conventional PI, fuzzy-tuned PI controller and IT2 FLC. Simulations are carried out in MATLAB Simulink platform, and results are compared to validate the efficacy of the proposed system with IT2 FLC. Section 2 explains the overall system configuration. The various control strategies are elucidated in Sect. 3 and Sect. 4 contribute to the simulation results and perform relative assessment.
2 System Description
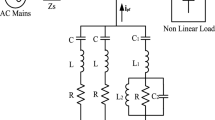
The schematic of the proposed shunt APLC using three-level multi-level inverter is shown in Fig. 1. It can also be scalable for five levels, seven levels, etc. When linear load is used, the source current remains sinusoidal and there is no need for APLC. But, nowadays due to development of the power semiconductor technology, various power converters are used in several industrial applications which exhibit highly nonlinear characteristics. It makes the source current non-sinusoidal. Hence, shunt APLCs are employed to make the source current sinusoidal. In high-power applications, MLI-based APLC is preferred compared to conventional two-level VSI-based APLC as they lessen the voltage or current rating of the switches used. The capacitor voltage control at the DC side of MLI plays a substantial role in the performance of shunt APLC. In the proposed work, IT2 FLC, fuzzy-tuned PI controller and traditional PI controllers are used for capacitor DC voltage control and its performance is compared under various load conditions. For reference current extraction Id − Iq theory is used and gating signal generation is done using carrier level-shifted pulse-width modulation (CLSPWM) technique. The MLI injects the compensating current that contains 180° phase shifted harmonic component of load current at the point of common coupling (PCC) which makes the source current sinusoidal.

Schematic of MLI-based shunt APLC
3 Control Scheme of the Proposed System
3.1 I d − I q Method for Reference Current Extraction
The functioning of any APLC normally depends on the reference current extraction method employed. The numerous reference current extraction techniques available in the literature are instantaneous p–q theory, modified p–q theory, synchronous current detection method, Id − Iq control strategy, etc. In this work, Id − Iq control strategy is employed due to its superior performance under steady-state and transient condition. Figure 2 depicts the implementation of Id − Iq control strategy in APLC for reference current extraction.

Implementation of Id − Iq control strategy
Here the three-phase load currents ila, ilb and ilc are first transformed into two-phase rotating reference frame coordinates id and iq using Park’s transformation as indicated in Fig. 2. The currents id and iq consist of fundamental or dc component and oscillating or ac component as given in Eqs. (1) and (2). In Eqs. (1) and (2), \(\overline{{i_{\text{d}} }}\) and \(\overline{{i_{\text{q}} }}\) represent dc component and \(\widetilde{{i_{\text{d}} }}\) and \(\widetilde{{i_{\text{q}} }}\) represent the oscillating component of active and reactive current, respectively.
To extract the fundamental or dc component, the currents id and iq are passed through low-pass filter. The dc component of id current is then summed up with controller output id1h which takes care of the inverter switching losses. The three-phase reference currents are obtained by converting the resultant id and iq currents using inverse Park’s transformation as illustrated in Fig. 2. For appropriate synchronization, phase-locked loop (PLL) circuit is incorporated.
3.2 Pulse-Width Modulation Technique
A PWM technique in which carrier waves are level-shifted is used for generating gate pulses. It employs k − 1 carrier signals for k-level inverter. The k − 1 carrier signals have equal frequency and amplitude. They are also in phase with each other. However, the DC offset of each carrier wave is different [31,32,33]; also, compared to other PWM techniques, this is easy to implement. Figure 3 shows the implementation of level-shifted PWM technique for a three-level MLI.

Implementation of level-shifted PWM technique
3.3 Capacitor DC Voltage Control
The appropriate working of any APLC depends on the capacitor DC voltage control. The capacitor DC voltage fluctuates under dynamic load condition. To keep the capacitor voltage at a preferred value, conventionally PI controller was used. However, PI controller gains Kp and Ki do not give adequate outcomes under varying load conditions. Hence, this work proposes the use of fuzzy-tuned PI controller and IT2 FLC for DC voltage regulation that works well under steady-state and dynamic load conditions.
3.3.1 Conventional PI Controller
Figure 4 explains the operation of conventional PI controller. The voltage across capacitor is measured with the help of voltage sensor and is given to comparator block. It is then compared with the desired capacitor voltage. The comparator outputs the error voltage which is then given to PI controller that processes the error voltage. The PI controller outputs the active current required for maintaining capacitor DC voltage at its reference value. Equation (3) gives the output of the PI controller.

Conventional PI controller
The traditional PI controller with gains Kp and Ki gives good results only under steady-state condition. Nevertheless, the power systems are highly nonlinear in nature. Consequently, for the tuning of PI controller, this work uses fuzzy logic controller which gives better results even under dynamic condition.
3.3.2 Fuzzy-Tuned PI Controller
The fuzzy logic concept was first proposed by Professor Zadeh in 1965 which can process partial membership function (MF) instead of crisp membership. This fuzzy-tuned PI controller is most suitable for a system with imprecise model. Figure 5 shows the schematic of fuzzy-tuned PI controller. Triangular membership function is used due to its simple implementation [34].

Schematic of fuzzy-tuned PI controller
The actual DC-link capacitor voltage and the reference voltage are compared in a comparator which gives an error voltage. The fuzzy logic controller used here has two inputs and two outputs. The two inputs are error and change in error, and the two outputs are Kp and Ki. The fuzzy logic controller has fuzzification, fuzzy inference system (FIS), rule base and defuzzification blocks. The crisp inputs given to the fuzzification block are converted into fuzzy sets of input variables. The seven linguistic variables used here for input and output are largely negative (LN), negative (N), slightly negative (SN), zero (Z), largely positive (LP), positive (P) and slightly positive (SP). The FIS block processes the input fuzzy variables based on the fuzzy IF–THEN rules and produces fuzzy output. The fuzzy rules are set such that the Kp and Ki values change in accordance with the system changes. The fuzzy rules are framed by the field experts based on their expertise. The FIS type used here is Mamdani Max–Min composition. Defuzzification block converts the fuzzy output into crisp output, and centroid defuzzification method is employed here. This self-tuned PI controller is based on fuzzy logic controller and is suitable for many industrial drives that employ highly nonlinear static converters at the front end. Figure 6 shows the structure of fuzzy-tuned PI controller.

Structure of fuzzy-tuned PI controller
Figure 7 shows the membership function plot for input variables error, change in error and output variables Kp and Ki.

Membership function plots for error, change in error, Kp, Ki
Table 1 shows the rule table for controller gains Kp and Ki used in fuzzy-tuned PI controller.
Figure 8 shows fuzzy surface viewer diagram for PI controller gains Kp and Ki.

Fuzzy surface viewer diagram for gain Kp and Ki
3.3.3 Interval Type-2 Fuzzy Controller
The type-1 fuzzy sets have crisp value of membership function, and consequently, it is incapable to handle system with high uncertainties. The type-2 fuzzy sets with MF as fuzzy have been developed by Zadeh. The fuzzy sets in type-2 fuzzy logic systems (FLS) are three dimensional and contain footprint of uncertainty (FOU) which allows additional degrees of freedom. Researches have shown that the type-2 FLS handles system with high uncertainties performs better compared to type-1 FLS [35,36,37]. In recent times, IT2 FLC, a special case of type-2 fuzzy, is widely used because of its reduced computational cost [38, 39]. IT2 FLC is characterized by a FOU with upper MF and lower MF. In this work, IT2 FLC is employed to regulate the capacitor DC voltage and to reduce total harmonic distortion (THD) of a system with high nonlinearity. Figure 9 shows the block diagram of an IT2 FLC which is same as that of a type-1 fuzzy logic controller except that there is an additional block called type reducer. The type reducer converts IT2 fuzzy sets into type-1 fuzzy set which is given to defuzzification block. A crisp output is obtained from the defuzzifier.

Block diagram of IT2 FLC
The simulation parameters used in MATLAB for IT2 FLC implementation are shown in Table 2.
Figures 10, 11, 12, 13, 14, and 15 show IT2 fuzzy logic controller implemented in MATLAB in which membership function plots have upper limit and lower limit.

IT2 FIS Editor

IT2 Gaussian MF editor for change in Error input

IT2 Gaussian MF editor for Error input

IT2 Gaussian MF editor for output

IT2 FLC Rule viewer diagram

IT2 FLC surface viewer Diagram
4 Performance Analysis of the Proposed System Through MATLAB Simulink
A three-phase three-level MLI-based APLC with PI controller, fuzzy-tuned PI and type-2 fuzzy controller is simulated through MATLAB Simulink, and results are analyzed with respect to THD. The nonlinear loads used here are three-phase uncontrolled rectifier and three-phase fully controlled rectifier with various firing angles. The parameters of the shunt APF system used in the simulation that are shown in Tables 3 and 4 show the THD of the system under various load conditions and various controllers. It can be inferred that IT2 fuzzy logic controller performs well compared to PI and type-1 fuzzy PI controller.
Figure 16a–c shows the grid voltage, load current, grid current, filter current and DC link capacitor voltage waveforms of a system with APLC and controlled rectifier with α = 15° as nonlinear load and PI, fuzzy-tuned PI and IT2 fuzzy logic controller, respectively.

a Voltage and current waveforms with PI controller, b voltage and current waveforms with fuzzy-tuned PI controller and c voltage and current waveforms IT2 FLC
The fast Fourier transform (FFT) analysis shows that the THD is 22.29% for a system without APLC which is shown in Fig. 17. Figure 18 shows that the THD is 5.69% with APLC and PI controller, and Fig. 19 depicts that the THD is 4.46% with APLC and fuzzy-tuned PI controller. Furthermore, Fig. 20 shows that the THD is further reduced to 3.40% with APLC and IT2 fuzzy logic controller.

FFT analysis of source current without APLC

FFT analysis of source current with APLC and PI controller

FFT analysis of source current with APLC and fuzzy-tuned PI controller

FFT analysis of source current with APLC and IT2 fuzzy logic controller
Figure 21 shows three-level MLI line side voltage. Figure 22 shows the voltage across capacitor with various controllers under transient condition. Here load current is increased from 50 to 100 A at t = 0.15 s. The capacitor voltage takes 70 ms to settle with IT2 fuzzy controller, 90 ms with type-1 fuzzy PI controller and 110 ms with PI controller.

Multi-level inverter AC side line voltage

Voltage across capacitor with PI, Fuzzy-tuned PI and IT2 fuzzy logic controller
5 Conclusion
In this work, a three-level multi-level inverter is used as a shunt APLC for harmonic minimization in high-power electric system due to nonlinear loads. The gating pulses for the MLI are generated using carrier level-shifted pulse-width modulation technique. The reference current extraction based on Id − Iq control strategy with simple algebraic calculations is employed here. The proposed system is tested under various load conditions for capacitor DC voltage control and THD reduction. The efficacy of the proposed system is tested by comparing the simulation results with conventional PI controller and fuzzy-tuned PI controller. From the simulation results, it has been shown that under steady-state condition, all the three controllers give better results. However, when there is sudden increase or decrease in load (under transient condition), there is corresponding decrease or increase in the DC-link voltage, and the time taken by DC-link voltage to reach its steady-state value is less with IT2 fuzzy controller compared to PI and fuzzy-tuned PI controller. Also the simulation results show that the THD is less with IT2 fuzzy controller compared to PI and fuzzy-tuned PI controller. So when we are dealing with highly nonlinear system such as electric power system, type-2 fuzzy controller gives better results. Also, MLI-based shunt active power line conditioner is suitable for high-power applications compared to conventional two-level VSI-based APLC. Future research work can be extended by using IT2 fuzzy adaptive optimal control technique for a system with unmeasured states.
References
Das, J.C.: Passive filters—potentialities and limitations. IEEE Trans. Ind. Appl. 40, 232–241 (2004)
Singh, B., Al-Haddad, K., Chandra, A.: A review of active filters for power quality improvement. IEEE Trans. Ind. Electron. 46, 960–971 (1999)
Varschavsky, A., Dixon, J., Rotella, M., Moran, L.: Cascaded nine level inverter for Hybrid series active power filter, using industrial controller. IEEE Trans. Ind. Electron. 57, 2761–2767 (2010)
Al-Othman, A., AlSharidah, M.E., Ahmed, N.A., Alajmi, B.N., et al.: Model predictive control for shunt active power filter in synchronous reference frame. J. Electr. Eng. Technol. 11, 405–415 (2016)
Mindykowski, J., Xu, X., Tarasiuk, T.: A new concept of harmonic current detection for shunt active power filters control. Measurement (Elsevier) 46, 4334–4341 (2013)
Xu, X.Y., Mindykowski, J., Chen, C.: Study on hybrid filtering solution for marine electric network. Polish Marit. Res. 17, 72–78 (2010)
Karuppanan, P., Kamala, K.M.: Active harmonic current compensation to enhance power quality. Int. J. Electr. Power Energy Syst. 62, 144–151 (2014)
Akagi, H., Inoue, S., Yoshii, T.: Control and performance of a transformerless cascade PWM STATCOM with star configuration. IEEE Trans. Ind. Appl. 43, 1041–1049 (2007)
Zhou, G., Wu, B., Xu, D.: Direct power control of a multilevel inverter based active power filter. Electr. Power Syst. Res. 77, 284–294 (2007)
Vijayakumar, M., Vijayan, D.: Photo voltaic based three-phase four-wire series hybrid active power filter for power quality improvement. Indian J. Eng. Mater. Sci. 21, 358–370 (2014)
Panda, A.K., Mikkili, S.: FLC based shunt active filter (p–q and Id–Iq) control strategies for mitigation of harmonics with different fuzzy MFs using MAT-LAB and real-time digital simulator. Electr. Power Energy Syst. 47, 313–336 (2013)
Mahajan, V., Agarwal, P., Gupta, H.O.: An artificial intelligence based controller for multilevel harmonic filter. J. Electr. Power Energy Syst. 58, 170–180 (2014)
Benchouiaa, M.T., Ghadbanea, I., Goleaa, A., Srairi, K., Benbouzidc, M.E.H.: Implementation of adaptive fuzzy logic and PI controllers to regulate the DC bus voltage of shunt active power filter. Appl. Soft Comput. 28, 125–131 (2015)
Choudary, J., Singh, D.K., Verma, S.N., Ahamed, K.: Artificial intelligence based control of a shunt active power filter. In: Procedia Computer Science, 2nd International Conference on Intelligent Computing, Communication & Convergence (ICCC-2016), Vol. 92, pp. 273–281 (2016)
Abdeldjalil, S., Chellali, B., Khaled, K., Nadjem, B.: An intelligent controller for a shunt active power filter for a three phase supply system. In: ICMSCE ‘17 Proceedings of the 2017 International Conference on Mechatronics Systems and Control Engineering, pp. 24–28. Abdullah Gul University, Kayseri, Turkey (2017)
Benaissa, A., Rabhi, B., Moussi, A.: Power quality improvement using fuzzy logic controller for five-level shunt active power filter under distorted voltage conditions. Front. Energy 8, 212–220 (2014). https://doi.org/10.1007/s11708-013-0284-4
Karuppanan, P., Mahapatra, K.K.: PI and fuzzy logic controllers for shunt active power filter—Areport. ISA Trans. 51, 163–169 (2012)
Mikkili, S., Panda, A.K.: PI and fuzzy logic controller based 3-phase 4-wire shunt active filters for the mitigation of current harmonics with the Id-Iq control strategy. J. Power Electron. 11, 914–921 (2011)
Bhende, C.N., Mishra, S., Jain, S.K.: TS-fuzzy-controlled active power filter for load compensation. IEEE Trans. Power Deliv. 21, 1459–1465 (2006)
Sun, K., Li, Y., Tong, S.: Fuzzy adaptive output feedback optimal control design for strict-feedback nonlinear systems. IEEE Trans. Syst. Man Cybern. Syst. 1, 33–44 (2017)
Gnanavadivel, J., Senthil Kumar, N., Yogalakshmi, P.: Comparative study of PI, fuzzy and fuzzy tuned PI controllers for single-Phase AC–DC three-level converter. J Electr. Eng. Technol. 12, 78–90 (2017)
Sun, K., Sui, S., Tong, S.: Fuzzy adaptive decentralized optimal control for strict feedback nonlinear large-scale systems. IEEE Trans. Cybern. 4, 1326–1339 (2018)
Zadeh, L.A.: The concept of a linguistic variable and its application to approximate reasoning-1. Inf. Sci. 8, 199–249 (1975)
Dongrui, Wu: On the fundamental differences between interval type-2 and type-1 fuzzy logic controllers. IEEE Trans. Fuzzy Syst. 20, 832–848 (2012)
El-Bardini, M., El-Nagar, A.M.: Direct adaptive interval type-2 fuzzy logic controller for the multivariable anaesthesia system. Ain Shams Eng. J. 2, 149–160 (2011)
Holmes, D.G., McGrath, B.P.: Opportunities for harmonic cancellation with carrier-based PWM for two-level and multilevel cascaded inverters. IEEE Trans. Ind. Appl. 37, 574–582 (2001)
Wong, M.C., Zhao, Z.Y., Han, Y.D., Zhao, L.B.: Three-dimensional pulse width modulation technique in three-level power inverters for three-phase four wired system. IEEE Trans. Power Electron. 16, 418–427 (2001)
Mondal, S.K., Bose, B.K., Oleschuk, V., Pinto, J.O.P.: Space vector pulse width modulation of three-level inverter extending operation into over modulation region. In: IEEE Power Electronics Specialists Conference (PESC) (2002)
Bruckner, T., Holmes, D.G.: Optimal pulse-width modulation for three-level inverters. IEEE Trans. Power Electron. 20, 82–89 (2005)
McGrath, B.P., Holmes, D.G.: Multicarrier, PWM strategies for multilevel inverters. IEEE Trans. Ind. Electron. 49, 858–867 (2002)
Naderi, R., Rezarahmati, A.: Phase-shifted carrier PWM technique for general cascaded inverters. IEEE Trans. Power Electron. 23, 1257–1269 (2008)
Liang, Y., Nwankpa, C.O.: New type of STATCOM based on cascading voltage source inverters with phase-shifted unipolar SPWM. In: Conference on Rec. IEEE-IAS Annu. Meeting, pp. 1447–1453 (1998)
long Cao, Y. Jiang, Y.-H., Tang, Z., Tan, W.: Research on different carrier phase-shifted angle with output voltage performance of cascade multilevel inverter. In: IEEE 6th International Power Electronics and Motion Control Conference, pp. 1448–1451 (2009)
Panda, A.K., Mikkili, S.: FLC based shunt active filter (p–q and Id–Iq) control strategies for mitigation of harmonics with different fuzzy MFs using MATLAB and real-time digital simulator. Electr. Power Energy Syst. 47, 313–336 (2013)
Hagras, H.: Type-2 FLCs: a new generation of fuzzy controllers. IEEE Comput. Intell. Mag. 2, 30–43 (2007)
Wu, D., Tan, W.W.: A simplified type-2 fuzzy controller for real-time control. ISA Trans. 15, 503–516 (2006)
Hassani, H., Zarei, J.: Interval type-2 fuzzy logic controller design for the speed control of DC motors. Syst. Sci. Control Eng. 3, 266–273 (2015). https://doi.org/10.1080/21642583.2015.1013644
Sepulveda, R., Montiel, O., Castillo, O., Melin, P.: Embedding a high speed interval type-2 fuzzy controller for a real plant into an FPGA. Appl. Soft Comput. 12, 988–998 (2012)
Mendel, J.M., John, R.I., Liu, F.: Interval type-2 fuzzy logic systems made simple. IEEE Trans. Fuzzy Syst. 14, 808–821 (2006)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Kala Rathi, M., Rathina Prabha, N. Interval Type-2 Fuzzy Logic Controller-Based Multi-level Shunt Active Power Line Conditioner for Harmonic Mitigation. Int. J. Fuzzy Syst. 21, 104–114 (2019). https://doi.org/10.1007/s40815-018-0547-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-018-0547-7