
Abstract
A state observer-based output-feedback controller is proposed for a class of nonlinear switched T–S fuzzy systems with actuator saturation and time delay in this paper. The proposed control scheme is developed by applying the parallel distributed compensation technique. The nonlinear switched fuzzy systems consist of several switched modes, and each switched mode is linear system. Therefore, by using Lyapunov function theory and average dwell time approach, the sufficient stability conditions are given. The effectiveness and feasibility of the proposed scheme are verified through numerical and practical examples.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Since the first paper on the Takagi–Sugeno (T–S) model [1] was published, it has attracted great attentions. Therefore, the stability analysis and control design of nonlinear T–S fuzzy systems have achieved great progress [2,3,4] in the fuzzy control field. The stability analysis and control synthesis for T–S fuzzy nonlinear systems with time delay are of essential importance due to the widely existence of time delay in practical engineering applications. The problems of exponential stability and control synthesis have been studied based on Lyapunov stability theorem in [5]. Moreover, the problems of robust stability and fuzzy controller design approaches also have been developed in [6,7,8,9,10], considered the control design and stability analysis problem for the T–S fuzzy time delay systems. The robust stabilization ways of T–S fuzzy time-varying delay systems can be found in [11, 12]. However, it should be noted that all the aforementioned results were derived from a class of T–S fuzzy systems with time delay and measurable state variables. When state variables are immeasurable, the authors in [13] considered the stabilization of T–S fuzzy nonlinear systems with bounded and time-varying input delay. [14] investigated the problems of an output-feedback control design method for a class of uncertain discrete fuzzy switched time delay systems. The aforementioned control design scheme and stability analysis are only suitable for the T–S fuzzy systems, instead of switched T–S fuzzy systems. Therefore, the problems on stability analysis and controller design for nonlinear switched T–S fuzzy time delay systems should be studied.
Special hybrid control system is called switched control system, which consists a family of continuous-time (discrete-time) subsystems and is orchestrated among these switching modes [15,16,17]. Compared with non-switched fuzzy control systems, the switched control system needs to satisfy the stability of each subsystem and the whole fuzzy closed-loop nonlinear switched system. Recently, the control design method of fuzzy switched nonlinear time delay systems has been extensively investigated and many control systems of the practical industry can be constructed as nonlinear switched control systems [18,19,20,21,22], such as the automotive industry, chemical procedure control systems, machine control systems, automobile speed change systems, medical monitor control systems, air traffic control, and other fields. Several Lyapunov function theories can be used to investigate the stability analysis and control design problem for a class of fuzzy switched nonlinear systems with time delay [23,24,25,26,27,28,29,30]. By constructing Lyapunov function approach, [23,24,25] proposed a controller design scheme for a class of fuzzy switched nonlinear systems with time-varying delays. Based on the single Lyapunov function theory, the papers in [26, 27] studied the robust stabilization problem for a class of switched nonlinear systems. To guarantee the stability for fuzzy switched systems, the authors in [28, 29] apply multiple Lyapunov function method to solve the problem. In addition, based on switching fuzzy Lyapunov functions theories, [30] considered the \( H_{\infty } \) control design method and stability analysis for the continuous-time fuzzy switched nonlinear control system. However, the aforementioned control schemes do not deeply consider that when the input of the controller is accumulated to a certain limit, it will enter the saturation state, which usually exists in many practical engineering control systems. And it will greatly reduce the dynamic performance of the control systems and even lead to instability for the closed-loop control systems [31,32,33]. To improve the effect of actuator saturation on the control performance, the control design method and stability analysis theories for the nonlinear switched T–S fuzzy system with actuator saturation and time delay are worthy to be studied and this issue is also important in both theory and engineering application. This further motivates us to research.
We propose an observer-based output-feedback control design scheme for a class of nonlinear switched T–S fuzzy systems with actuator saturation and time delay. Based on the PDC technique, an output-feedback fuzzy controller is developed. Meanwhile, by combining the Lyapunov function theory and average dwell time method, the stability analysis of the closed-loop nonlinear switched T–S fuzzy systems is given in the form of linear matrix inequality (LMI). The main contributions can be summarized as follows:
-
1.
By using the average dwell time (ADT) approach, a set of switching laws for the nonlinear switched fuzzy control system is designed and the proposed observer-based output-feedback control scheme can guarantee the stability of nonlinear switched fuzzy T–S control systems. Despite the papers [11, 13], which also investigated the time delay and control design problem of nonlinear T–S fuzzy system, they are only suitable for the non-switched T–S fuzzy systems. Therefore, these cannot be applied to the nonlinear switched fuzzy control system with time delay in this study.
-
2.
The immeasurable state vector and time delay problems are contained in the addressed switched fuzzy control systems. Note that the previous papers in [34, 35] also investigated the time delay and immeasurable state problem, but nonlinear switched T–S fuzzy nonlinear systems in [34, 35] did not consider the actuator saturation problem.
2 System Description and Preliminaries
First, the following nonlinear switched fuzzy control system with time delay and actuator saturation is described as follows:
where \( {\kern 1pt} x(t) \in R^{n} {\kern 1pt} \) denotes the state variable vector; \( {\kern 1pt} u_{\sigma (t)} (t) \in R^{m} {\kern 1pt} \) denotes the controller input; \( {\kern 1pt} y(t) \in R^{q} {\kern 1pt} \) expresses the output vector of the fuzzy system; \( \tau \) is a scalar constant and denotes the delay time; \( f_{\sigma (t)} ( \cdot ) \), \( {\kern 1pt} h_{\sigma (t)} ( \cdot ) \), \( {\kern 1pt} g_{\sigma (t)} ( \cdot ) \), \( {\kern 1pt} l_{\sigma (t)} ( \cdot ){\kern 1pt} \), and \( {\kern 1pt} j_{\sigma (t)} ( \cdot ) \) are functions satisfying the Lipschitz condition.
The nonlinear switched fuzzy system (1) has \( \,l\, \) switched nonlinear subsystems, which can be described in T–S fuzzy model form. Then, the \( \,g\, \)-th switching fuzzy rule is described:
\( R_{g}^{f} \): If \( \;\alpha_{g}^{1} (t)\; \) is \( \;F_{{g{\kern 1pt} r}}^{1} \; \) and \( \, \cdots \, \) and \( \;\alpha_{g}^{k} (t)\; \) is \( \;F_{{g{\kern 1pt} r}}^{k} \; \), then
where \( x(t) = [x_{1} (t)\,,\,x_{2} (t)\,,\, \ldots ,\,x_{n - 1} ,x_{n} ]^{\text{T}} \) is the state vector, containing \( n \) state variables; \( \alpha_{g} (t) = [\alpha_{g}^{1} (t),\,\alpha_{g}^{2} (t), \ldots ,\,\alpha_{g}^{k} (t)]^{T} \) denotes the premise variables vector. \( \;\sigma (t)\; \) is the switching laws of the fuzzy closed-loop switched nonlinear system, which is defined as \( \;\sigma (t)\; = g \) in a finite set \( N = \left\{ {1, \ldots ,l} \right\} \), where \( l\; \) represents the number of switching subsystems for the nonlinear fuzzy closed-loop switched system; \( A_{{g{\kern 1pt} r}} {\kern 1pt} \), \( A_{{d{\kern 1pt} g{\kern 1pt} r}} \), \( {\kern 1pt} B_{{g{\kern 1pt} r}} {\kern 1pt} \), \( {\kern 1pt} C_{gr} \), and \( C_{{d{\kern 1pt} g{\kern 1pt} r}} \) are constant matrices; \( \tau \) represents a scalar constant time delay; controller \( {\text{sat}}(u_{g} (t)) \in R^{m} \) denotes the control input of fuzzy closed-loop switched system with actuator saturation; and controller \( {\text{sat}}(u_{g} (t)) \) can be defined as follows [36]:
where \( {\text{sat}}(\vartheta_{g} (t)) \) is
and \( {\text{sat}}(\vartheta_{gr} (t)) = {\text{sign}}(\vartheta_{gr} (t))\hbox{min} \{ U_{g} ,|\vartheta_{gr} (t)|\} \) (\( U_{g} \) is a positive constant).
Suppose that there is a matrix \( H \in R^{n \times n} \), in which \( H_{ - } s \) is denoted as the \( q \)-th row of matrix \( H \):
Let matrix \( \nu_{m \times m} \) be a diagonal matrix with its diagonal elements value either 1 or 0. For example, when \( m = 2 \), the diagonal matrix \( \nu_{m \times m} \) is
Suppose that each element of the matrix \( \nu_{m \times m} \) is labeled as \( E_{s} \) (\( {\kern 1pt} s = 1,2, \ldots ,2^{m} \)), and let \( E_{s}^{ - } \) be \( \,E_{s}^{ - } = I - E_{s} \).
According to the singleton fuzzifier, product inference, and weighted average defuzzification, we have the following model for the nonlinear fuzzy closed-loop switched control system:
where
\( \varsigma_{gi}^{j} (\alpha_{g}^{j} (t))\; \) is the fuzzy membership function for variable \( \;\alpha_{g}^{j} (t) \), \( \;r_{g} \; \) is the number of fuzzy rules of \(g{\text{-th}} \) global linear switching fuzzy mode. All variable functions \(\varphi_{gi} \) satisfy \( \;0 \le \mu_{gi} (\alpha_{g}^{j} (t)) \le 1\; \) and \( \sum\nolimits_{i = 1}^{{r_{g} }} {\varphi_{gi} (\alpha_{g}^{j} (t))} = 1\;(t \ge 0) \) \( \;(t \ge 0) \). In addition, \( \;\zeta_{g} \; \) denotes a switching function, which is defined as:
Before stating the stability conditions of nonlinear fuzzy closed-loop switched control system, we need to use the following definitions and lemmas in this paper.
Definition 1 [37]
For any \( Z > z \ge 0 \), let \( N_{g} (z,Z) \) represent the switching numbers of the switching law \( \;\sigma (t) = g \) on the interval \( \;(z,Z) \). If the given positive constant \( \,\tau_{a} \) is greater than 0 and an integer \( \,N_{0} \) is greater than or equals 0, then
holds. The positive constant \( \,\tau_{a} \, \) denotes the average dwell time; the constant \( \,N_{0} \, \) is called a chatter bound.
Lemma 1 [31]
Matrices \( \,W \in R^{m \times n} \, \) and \( \,M \in R^{m \times n} \) are assumed as known. If the state vector \( \,x(t) \in \ell (W) \), then \( \,{\text{sat}}(Wx(t))\, \) becomes:
where \( \;\eta_{s} (t)\, \) for \( s = 1,2, \ldots 2^{m} {\kern 1pt} \) are scalars, which satisfy \( {\kern 1pt} 0 \le \eta_{s} (t) \le 1{\kern 1pt} \) and \( \sum\nolimits_{s = 1}^{{2^{m} }} {\eta_{s} (t) = 1} \); \( \ell (W) \) denotes the \( q{\text{ - th}} \) row of matrix \( W \), \( M \) is a constant matrix with appropriate dimensions.
Lemma 2 [38]
Assume that the time is \( \,t\, \) moment and the number of activated fuzzy rules is less than or equal to \( \omega (1 \le \omega \le r_{g} ) \), then
where \( \sum\nolimits_{r = 1}^{{r_{g} }} {\varphi_{gr} (\alpha_{g} (t)) = 1} \) and \( \varphi_{gr} (\alpha_{g} (t)) > 0 \) for all \( r \).
In this paper, our main goal is to design an observer-based output-feedback controller to guarantee that the nonlinear fuzzy closed-loop switched system is asymptotically stable.
3 Fuzzy Observer Design and Control Analysis
This section will give a fuzzy observer design scheme and the control analysis of fuzzy closed-loop switched systems.
Based on PDC technique, the fuzzy closed-loop switched observer model for the switched system (2) is designed as follows:
where vector \( \hat{x}(t) \) represents the estimate of state vector \( x(t) \) and \( L_{kr} \) is called the observer gain matrix.
According to the PDC technique, the fuzzy output-feedback control law is designed as follows:
Let the state estimation error vector be \( e(t) = x(t) - \hat{x}(t) \). From the fuzzy closed-loop switched control system (4) and the fuzzy controller (10), we can get the dynamic equation of \( \,\dot{e}(t) \).
By defining the augmented vector as \( {\kern 1pt} \tilde{x}(t) = [\begin{array}{*{20}c} {x^{\text{T}} (t)} & {e^{\text{T}} (t)} \\ \end{array} ]^{\text{T}} \), its dynamic is described as:
where
4 Stability Analysis
Theorem 1 [39]
For some given scalar constants \( \varepsilon > 0 \), \( 0 < \beta < 1 \), \( \gamma > 1 \), when time is \( t \) moment, the number of activated fuzzy rules is less than or equal to \( \omega \) \( \,(1 \le \omega \le r_{g} )\, \). The nonlinear fuzzy closed-loop switched control system (2) is stable, if there exist some matrices \( X_{g1} > 0 \), \( X_{2} > 0 \), \( Q_{g1} > 0 \), \( Q_{2} > 0 \), \( Z_{g1} \ge 0 \), \( Z_{{g{\kern 1pt} 2}} \ge 0 \), \( \hat{Z}_{g1} \ge 0 \), and \( \hat{Z}_{{g{\kern 1pt} 2}} \ge 0\;(g = 1,2, \ldots l\;i,j = 1,2, \ldots r_{g} ) \) \( (g = 1,2, \ldots l \) \( i,j = 1,2, \ldots r_{g} ) \) satisfying the following LMIs:
With
Meanwhile, the given switching rules needs to satisfy \( \tau_{a} \ge \tau_{a}^{ * } = {\raise0.7ex\hbox{${\ln \gamma }$} \!\mathord{\left/ {\vphantom {{\ln \gamma } {2\lambda }}}\right.\kern-0pt} \!\lower0.7ex\hbox{${2\lambda }$}} \), where time \( \tau_{a} \) represents the average dwell time. Then, the fuzzy control gain matrices \( K_{gj} = Y_{gj} P_{g1} \) and the fuzzy observer gain matrices \( L_{{g{\kern 1pt} r}} = R_{{g{\kern 1pt} r}} X_{2}^{ - 1} \), which can ensure that the fuzzy closed-loop switched nonlinear system (2) is asymptotically stable.
Proof
Construct the following Lyapunov candidate function \( V(t) \) for the nonlinear fuzzy closed-loop switched system (2):
where \( S_{g} = P_{g} Q_{g} P_{g} \), \( P_{g} \) and \( Q_{g} \) are two positive definite matrices.
Differentiating \( V(t) \) along the trajectory of (19) produces
Then, we have
where
Multiplying the both sides of (21) with \( P_{g}^{ - 1} \) and denoting \( P_{g}^{ - 1} = X_{g} \), we can derivate
Letting positive matrices \( X_{g} = \) diag \( (\varepsilon X_{g1} \;,\;X_{2}^{ - 1} ) \) and \( Q_{g} = \) diag \( (\varepsilon Q_{g1} \;,\;X_{2}^{ - 1} Q_{2} X_{2}^{ - 1} ) \) [40], by using the inequities (22) and (23), we can derive the following inequalities
where \( \varepsilon > 0 \). Therefore, these inequalities indicate that the nonlinear fuzzy closed-loop switched system is asymptotically stable.
Denoting \( K_{gj} X_{{g{\kern 1pt} 1}} = Y_{gj} \) and \( X_{2} L_{{g{\kern 1pt} r}} = R_{gr} \), then inequalities (24) and (26) can be written as
Multiplying the both sides of (25) and (27) with \( X_{2}^{ - 1} \), respectively, we can get
From (13)–(16), we will use Schur’s complement formula to, respectively, simplify inequalities (28), (29), (30), and (31).
By using the MATLAB software to solve the LMIs (13)–(16), we can get the values of positive definite matrices \( X_{g1} \) (\( X_{g1} = P_{g1}^{ - 1} \)) and \( X_{2} \), the control gain matrices \( Y_{gj} \) (\( K_{gj} = Y_{gj} P_{g1} \)), and the observer gain matrices \( R_{{g{\kern 1pt} r}} \)(\( L_{{g{\kern 1pt} r}} = R_{{g{\kern 1pt} r}} X_{2}^{ - 1} \)).
Next, the condition of average dwell time [41] will be given. According to inequalities (17) and (18), and the Lyapunov candidate function \( V_{\sigma (t)} (t) = V_{g} (t) \), we get
where \( \lambda_{1} = \hbox{min} \{ \mathop {\hbox{min} }\limits_{g \in M} \underline{\lambda } (P_{g1} ),\underline{\lambda } (P_{2} ),\mathop {\hbox{min} }\limits_{k \in M} \underline{\lambda } (Q_{g1} ),\underline{\lambda } (Q_{2} )\} \); \( \lambda_{2} = \hbox{max} \{ \mathop {\hbox{max} }\limits_{g \in M} \bar{\lambda }(P_{g1} ),\bar{\lambda }(P_{2} ),\mathop {\hbox{max} }\limits_{g \in M} \bar{\lambda }(Q_{g1} ),\bar{\lambda }(Q_{2} )\} \); \( \gamma > \hbox{max} \{ \frac{{\bar{\lambda }(P_{g1} )}}{{\underline{\lambda } (P_{g1} )}},\frac{{\bar{\lambda }(P_{2} )}}{{\underline{\lambda } (P_{2} )}},\frac{{\bar{\lambda }(Q_{g1} )}}{{\underline{\lambda } (Q_{g1} )}},\frac{{\bar{\lambda }(Q_{2} )}}{{\underline{\lambda } (Q_{2} )}},\;1\} \); \( g \) and \( n \) denote the different switching constants of the switching modes; \( \underline{\lambda } ( \cdot ) \) and \( \bar{\lambda }( \cdot ) \), respectively, denote the minimum and maximum eigenvalues of the positive definite matrices \( P_{g1} \), \( P_{2} \), \( Q_{g1} \), and \( Q_{2} \); \( \lambda_{1} \) denotes the common minimum eigenvalues of the four positive definite matrices; \( \lambda_{2} \) denotes the common maximum eigenvalues of the four positive definite matrices; \( t_{0} \) is the initial switching time moment for the time \( t \).
At the switching time point \( t_{p} \) with \( t_{p}^{ - } = \lim_{{t \to t_{p} }} t \) and the Lyapunov function formula \( V_{\sigma (t)} (t) = V_{{\sigma (t_{p} )}} (t_{p} ) \), if inequality \( V_{{\sigma (t_{p} )}} (t_{p} ) \le \gamma {\kern 1pt} V_{{\sigma (t_{p}^{ - } )}} (t_{p}^{ - } ) \) holds, then we know that for any switching time points \( t \in [t_{p} ,t_{p + 1} ) \) \( (0 \le p \le N_{k} (t_{0} ,t)) \), the Lyapunov function \( V_{\sigma (t)} (t) \) satisfies the following:
Therefore, according to inequalities (33) and (34), we get \( \;V_{\sigma (t)} (t) \ge \lambda_{1} \left\| {\tilde{x}(t)} \right\|^{2} \).
From formula (34) and Definition 1, we get the following inequality
So, we can get
From the above inequality (36), we know that if the inequality satisfies \( \;\lambda - {\raise0.7ex\hbox{${\ln \gamma }$} \!\mathord{\left/ {\vphantom {{\ln \gamma } {2\tau_{a} }}}\right.\kern-0pt} \!\lower0.7ex\hbox{${2\tau_{a} }$}} > 0 \), the nonlinear fuzzy closed-loop switched control system (2) is asymptotically stable. Moreover, we require the ADT to satisfy the condition of \( \tau_{a} \ge \tau_{a}^{ * } = {\raise0.7ex\hbox{${\ln \gamma }$} \!\mathord{\left/ {\vphantom {{\ln \gamma } {2\lambda }}}\right.\kern-0pt} \!\lower0.7ex\hbox{${2\lambda }$}} \).
Remark 1
Note that from (36), we can conclude that the stability of the system not only can be guaranteed, but also can illustrate the effectiveness of the proposed method. Meanwhile, we can make the tracking error as small as possible by suitably increasing the design parameters \( L_{gr} \) (\( g = 1,2 \); \( r = 1,2 \)) and \( \lambda_{2} \) or decreasing the design parameters \( \lambda_{1} \) and \( \gamma \).
5 Simulation Study
In order to verify the performance of the design fuzzy controller and fuzzy observer, we will give two examples as follows:
Example 1
To explain the stability condition of Theorem 1, consider the following nonlinear switched control system:
where \( A_{11} = \left[ {\begin{array}{*{20}c} { - 1.5} & {0.1} \\ { - 1.4} & { - 0.9} \\ \end{array} } \right] \), \( A_{12} = \left[ {\begin{array}{*{20}c} {0.25} & 0 \\ {0.1} & {0.25} \\ \end{array} } \right] \), \( A_{21} = \left[ {\begin{array}{*{20}c} { - 2.0} & {0.3} \\ { - 5.0} & {1.6} \\ \end{array} } \right] \), \( A_{22} = \left[ {\begin{array}{*{20}c} {0.2} & 0 \\ 0 & {0.2} \\ \end{array} } \right] \), \( A_{d11} = \left[ {\begin{array}{*{20}c} { - 0.12} & 0 \\ {0.1} & { - 0.28} \\ \end{array} } \right] \), \( A_{d12} = \left[ {\begin{array}{*{20}c} { - 0.02} & { - 0.08} \\ { - 0.26} & { - 0.07} \\ \end{array} } \right] \), \( A_{d21} = \left[ {\begin{array}{*{20}c} { - 0.09} & { - 0.1} \\ { - 0.05} & { - 0.5} \\ \end{array} } \right] \), \( A_{d22} = \left[ {\begin{array}{*{20}c} { - 0.07} & {0.1} \\ { - 0.01} & { - 0.5} \\ \end{array} } \right] \), \( B_{11} = B_{22} = [\begin{array}{*{20}c} 0 & {0.1} \\ \end{array} ]^{T} \), \( B_{12} = B_{21} = \left[ {\begin{array}{*{20}c} 0 & {0.2} \\ \end{array} } \right]^{T} \), \( C_{11} = [\begin{array}{*{20}c} 0 & {1.5} \\ \end{array} ] \), \( C_{12} = [\begin{array}{*{20}c} 0 & {1.2} \\ \end{array} ] \), \( C_{21} = \left[ {\begin{array}{*{20}c} 0 & {1.3} \\ \end{array} } \right] \), \( C_{22} = \left[ {\begin{array}{*{20}c} 0 & {1.2} \\ \end{array} } \right] \), \( C_{d11} = [\begin{array}{*{20}c} 0 & {1.5} \\ \end{array} ] \), \( C_{d12} = [ - \begin{array}{*{20}c} {0.1} & {0.1} \\ \end{array} ] \), \( C_{d21} = \left[ {\begin{array}{*{20}c} 0 & {0.1} \\ \end{array} } \right] \), \( C_{d22} = \left[ {\begin{array}{*{20}c} 0 & {0.1} \\ \end{array} } \right] \), \( H_{11} = \left[ {\begin{array}{*{20}c} {2.1} & {2.2} \\ \end{array} } \right] \), \( H_{12} = \left[ {\begin{array}{*{20}c} {0.1} & {0.02} \\ \end{array} } \right] \), \( H_{21} = \left[ {\begin{array}{*{20}c} {0.1} & {0.02} \\ \end{array} } \right] \), \( H_{22} = \left[ {\begin{array}{*{20}c} {0.5} & {2.01} \\ \end{array} } \right] \), \( E_{s} = 1 \), \( E_{s}^{ - } = 0 \).
In the fuzzy rules 1 and 2, the membership functions are:
Then, the nonlinear fuzzy switched control system (2) is:
The fuzzy closed-loop switched observer and controller are:
where \( {\text{sat}}(K_{{g{\kern 1pt} r}} \hat{x}(t)) = {\text{sign}}(K_{{g{\kern 1pt} r}} \hat{x}(t)){ \hbox{min} }\{ U_{g} ,|K_{{g{\kern 1pt} r}} \hat{x}(t)|\} \), we define a saturation value \( U_{g} = 1 \) (\( g = 1,2 \)) for each subsystem.
Given \( \varepsilon = 1.3 \), \( {\kern 1pt} \beta = 0.5 \), \( {\kern 1pt} \omega = 0.3 \), \( \gamma = 2 \), and \( \lambda = 0.87 \), the feedback gain and observer gain matrices are obtained as\( K_{11} = \left[ {\begin{array}{*{20}c} { - 1.2773} & {12.7092} \\ \end{array} } \right] \), \( K_{12} = \left[ {\begin{array}{*{20}c} {2.6445} & {10.4074} \\ \end{array} } \right] \), \( K_{21} = [\begin{array}{*{20}c} { - 6.3222} & {22.7085} \\ \end{array} ] \), \( K_{22} = \left[ {\begin{array}{*{20}c} { - 8.9847} & {22.1706} \\ \end{array} } \right] \), \( L_{11} = \left[ {\begin{array}{*{20}c} { - 0.6381} & {1.6804} \\ \end{array} } \right]^{T} \), \( L_{12} = \left[ {\begin{array}{*{20}c} {0.1758} & {3.0713} \\ \end{array} } \right]^{T} \), \( L_{21} = \left[ {\begin{array}{*{20}c} { - 3.6271} & {4.0943} \\ \end{array} } \right]^{T} \), \( L_{22} = \left[ {\begin{array}{*{20}c} {0.0807} & {3.1880} \\ \end{array} } \right]^{T} \).
In the simulation, the initial conditions \( x(0) = \left[ {\begin{array}{*{20}c} { - 12.4} & {0.02} & { - 17.76} & { - 11.96} \\ \end{array} } \right]^{T} \), the constant time delay \( \tau = 2 \) and the response of the control system are given in Figs. 1, 2, 3, 4 and 5, where Figs. 1 and 2 indicate the trajectories of the states vector \( x(t) \) and their state estimates vector \( \hat{x}(t) \), Fig. 3 indicates the trajectories of observer error vector \( e(t) \), Fig. 4 indicates the trajectories of control inputs \( u(t) \), and Fig. 5 indicates the trajectory of switching signal \( \sigma (t) \).

Trajectories of \( x_{1} (t) \) (solid line) and \( \hat{x}_{1} (t) \) (dotted line)

Trajectories of \( x_{2} (t) \) (solid line) and \( \hat{x}_{2} (t) \) (dotted line)

Trajectory of \( e_{1} \) (solid line) and \( e_{2} \) (dotted line)

Trajectories of \( u_{1} \) (solid line) and \( u_{2} \) (dotted line)

Trajectory of \( \sigma (t) \)
Example 2
Consider a continuous stirred tank reactor with an irreversible first-order exothermic reaction, whose reaction form takes place from \( a \) to \( b \) (\( a \) is a reaction species and \( b \) is a product species) [15, 42]. Meanwhile, the fluxion of the species \( \,a \) results in the time delay of this system. The operation schedule requires switching between two available inlet streams consisting of the species \( a \) at flow rate \( F_{1} \), \( F_{2} \), concentrations \( C_{a1} \), \( C_{a2} \), and temperatures \( T_{a1} \), \( T_{a2} \), respectively. Therefore, the mathematical model of the process is described as:
where \( C_{a} (t) \) represents the concentration of the species \( a \); \( F_{\sigma (t)} \) denotes the flow rate of the species \( a \); \( T(t) \) denotes the temperature of the reactor; \( O_{\sigma (t)} (t) \) is the heat removed from the reactor; the volume \( V = 0.1 \); the pre-exponential constant \( k = 1.2 \times 10^{10} {\text{s}}^{ - 1} \); the activation energy \( E = 8.314 \times 10^{4} \,{\text{kJ}}/{\text{kmol}} \); the enthalpy of reaction \( \Delta H = - 4.78 \times 10^{4} \,{\text{kJ}}/{\text{kmol}} \); the heat capacity \( c = 0.0239\,{\text{kJ}}/{\text{kg}}\,{\text{K}} \); and fluid density in the reactor \( \rho = 1000.0\,{\text{kg}}/{\text{m}}^{3} \); and \( \sigma (t) \in \{ 1,2\} \) is the switching function. In accordance with the requirements of the chemical production process, it is assumed that the critical concentration of \( C_{a} - C_{as\sigma (t)} \) is \( 0.06\,{\text{kmol}}/{\text{m}}^{3} \). When \( C_{a} - C_{as\sigma (t)} < 0.06\,{\text{kmol}}/{\text{m}}^{3} \), subsystem 1 is activated; when \( 0.06 < C_{a} - C_{as\sigma (t)} \,{\text{kmol}}/{\text{m}}^{3} \), subsystem 2 is activated. Then, the system described by (41) is a classical nonlinear system as follows:
Subsystem 1:
where F1 = 0.0334 m3/s, T1 = 352.6 K, Ca1 = 0.79 kmol/m3.
Subsystem 2:
where F2 = 0.0167 m3/s, T2 = 310.0 K, Ca2 = 1.0 kmol/m3.
The control objective is to stabilize the reactor at the unstable equilibrium point \( (C_{as} ,T_{s} )_{1} = (0.57,395.3) \) and \( (C_{as} ,T_{s} )_{2} = (0.738,509.12) \) using the rate of heat input \( O_{\sigma (t)} (t) \) and change in inlet concentration of species \( a \). Definite fuzzy system of state vector is \( x(t) = \left[ {\begin{array}{*{20}c} {x_{1} (t)} & {x_{2} (t)} \\ \end{array} } \right]^{\text{T}} = [\begin{array}{*{20}c} {C_{a} (t) - C_{as\sigma (t)} (t)} & {T(t) - T_{s\sigma (t)} (t)} \\ \end{array} ]^{\text{T}} \), and the system of control input is \( u_{\sigma (t)} (t) = O_{\sigma (t)} (t) - O_{s\sigma (t)} (t) \), where \( \Delta C_{a\sigma (t)} (t) = C_{a\sigma (t)} (t) - C_{a\sigma (t)s} (t) \le 1\;{\text{kmol}}/{\text{m}}^{3} \), \( \left| {u_{\sigma (t)} (t)} \right| \le 1\,{\text{kJ}}/{\text{h}} \), and \( O_{s\sigma (t)} (t) = 0\;{\text{kJ}}/{\text{h}} \). Then, it is reported in [42] that the nonlinear plant of (36) can be represented by the following fuzzy rules:
In the subsystem 1, the fuzzy rule 1: If \( x_{1} (t) \) is \( M_{11} (x_{1} (t)) \), then
In the subsystem 1, the rule 2: If \( x_{2} (t) \) is \( M_{12} (x_{1} (t)) \), then
In the subsystem 1, the fuzzy rule 1: If \( x_{2} (t) \) is \( M_{21} (x_{2} (t)) \), then
In the subsystem 1, the fuzzy rule 2: If \( x_{2} (t) \) is \( M_{22} (x_{2} (t)) \), then
In the fuzzy rules, the fuzzy membership functions are chosen as follows:
The fuzzy switched observer and controller are:
where \( {\text{sat}}(K_{{g{\kern 1pt} r}} \hat{x}(t)) = {\text{sign}}(K_{{g{\kern 1pt} r}} \hat{x}(t))\hbox{min} \{ U_{g} ,|K_{{g{\kern 1pt} r}} \hat{x}(t)|\} \), we define the saturation values are \( U_{1} = 0.4 \) and \( U_{2} = 0.1 \), respectively.
Given \( \varepsilon = 1.5 \), \( {\kern 1pt} \beta = 0.7 \), \( {\kern 1pt} \omega = 1.2 \), \( \gamma = 3.5 \), \( E_{s} = 1 \), \( E_{s}^{ - } = 0 \), and \( \lambda = 1.59 \), and by the MATLAB software, the eigenvalues of the closed-loop switched control system are: \( K_{11} = \left[ {\begin{array}{*{20}c} {5.9189} & {4.5483} \\ \end{array} } \right] \), \( K_{12} = \left[ {\begin{array}{*{20}c} {15.7800} & {4.3896} \\ \end{array} } \right] \), \( K_{21} = \left[ {\begin{array}{*{20}c} {5.2824} & {5.5292} \\ \end{array} } \right] \), \( K_{22} = \left[ {\begin{array}{*{20}c} {7.1881} & {6.3048} \\ \end{array} } \right] \), \( L_{11} = \left[ {\begin{array}{*{20}c} {2.6811} & {0.1455} \\ \end{array} } \right]^{\text{T}} \), \( L_{12} = \left[ {\begin{array}{*{20}c} { - 7.8341} & {0.3157} \\ \end{array} } \right]^{\text{T}} \), \( L_{21} = \left[ {\begin{array}{*{20}c} {2.8347} & {0.1366} \\ \end{array} } \right]^{\text{T}} \), \( L_{22} = \left[ {\begin{array}{*{20}c} { - 7.8154} & {0.2699} \\ \end{array} } \right]^{\text{T}} \).
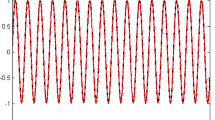
In order to show the effective of the nonlinear fuzzy controller, the controller (45) is used in the nonlinear system (2). Choose the initial condition \( x(0) = \left[ {\begin{array}{*{20}c} {0.12} & {0.12} & {0.1} & {0.1} \\ \end{array} } \right]^{\text{T}} \) and the constant time delay \( \tau = 0.05 \), the simulation results are given in Figs. 6, 7, 8, 9, and 10, where Figs. 6 and 7 indicate the trajectories of the state vector \( x(t) \) and their state estimates vector \( \hat{x}(t) \), Fig. 8 indicates the trajectories of observer error \( e(t) \), Fig. 9 indicates the trajectories of control inputs action \( u(t) \), and Fig. 10 indicates the trajectory of switching signal \( \sigma (t) \).

Trajectories of \( x_{1} (t) \) (solid line) and \( \hat{x}_{1} (t) \) (dotted line)

Trajectories of \( x_{2} (t) \) (solid line) and \( \hat{x}_{2} (t) \) (dotted line)

Trajectories of \( e_{1} \) (solid line) and \( e_{2} \) (dotted line)

Trajectories of \( u_{1} \) (solid line) and \( u_{2} \) (dotted line)

Trajectory of \( \sigma (t) \)
6 Conclusions
In this paper, an output-feedback controller has been developed for a class of nonlinear fuzzy switched control systems with actuator saturation and time delay. A fuzzy state observer is designed to estimate the unmeasured states. By using Lyapunov function theory and average dwell time method, an observer-based output-feedback control scheme is synthesized. It is shown that all the trajectories of the fuzzy closed-loop switched control system are asymptotically stable. Future research will concentrate on MIMO T–S fuzzy systems with dead zones.
References
Takagi, T., Sugeno, M.: Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Fuzzy Syst. 15(1), 116–132 (1985)
Xie, X.P., Liu, Z.W., Zhu, X.L.: An efficient approach for reducing the conservatism of LMI-based stability conditions for continuous-time T–S fuzzy systems. Fuzzy Sets Syst. 263, 71–81 (2015)
Chun, H.F., Liu, Y.S., Kau, S.W., Lin, H., Lee, C.H.: A new LMI-based approach to relaxed quadratic stabilization of T–S fuzzy control systems. IEEE Trans. Fuzzy Syst. 14(3), 386 (2006)
Yang, Y., Fan, X.X., Zhang, T.P.: Anti-disturbance tracking control for systems with nonlinear disturbances using T–S fuzzy modeling. Neurocomputing 171, 1027–1037 (2016)
Jian, J.G., Jiang, W.L.: Lagrange exponential stability for fuzzy Cohen–Grossberg neural networks with time-delays. Fuzzy Sets Syst. 277, 65–80 (2015)
Chen, B., Liu, X.P., Lin, C., Liu, K.: Robust H∞ control of Takagi–Sugeno fuzzy systems with state and input time delays. Fuzzy Sets Syst. 160(4), 403–422 (2009)
Chen, C.W., Lin, C.L., Tsai, C.H., Chen, C.Y.: A novel delay-dependent criterion for time-delay T–S fuzzy systems using fuzzy Lyapunov method. Int. J. Artif. Intell. Tools 16(3), 545–552 (2007)
Yang, Y., Zheng, W.X., Sun, C.Y., Guo, L.: DOB fuzzy controller design for non-Gaussian stochastic distribution systems using two-step fuzzy identification. IEEE Trans. Fuzzy Syst. 24(2), 401–418 (2016)
Chen, C.W.: Modeling, control, and stability analysis for time-delay TLP systems using the fuzzy Lyapunov method. Neural Comput. Appl. 9, 1433–3508 (2011)
Lai, G.Y., Liu, Z., Zhang, Y., Chen, C.L.P.: Adaptive fuzzy quantized control of time-delayed nonlinear systems with communication constraint. Fuzzy Sets Syst. (2016). doi:10.1016/j.fss.2016.05.012
Chen, P., Wen, L.Y., Yang, J.Q.: On delay-dependent robust stability criteria for uncertain T–S fuzzy systems with interval time-varying delay. Int. J. Fuzzy Syst. 13(1), 1 (2011)
Wu, L.G., Su, X.J., Shi, P., Qiu, J.B.: A new approach to stability analysis and stabilization of discrete-time T–S fuzzy time-varying delay systems. IEEE Trans. Syst. Man Cybern. B 41(1), 273–286 (2011)
Chen, B., Liu, X.P., Tong, S.C., Lin, C.: Observe-based stabilization of T–S fuzzy systems with input delay. IEEE Trans. Fuzzy Syst. 16(3), 652–663 (2008)
Yu, W.S., Karkoub, M., Wu, T.S., Her, M.G.: Delayed output feedback control for nonlinear systems with two-layer interval fuzzy observers. IEEE Trans. Fuzzy Syst. 22(3), 611–630 (2014)
Chiou, J.S., Wang, C.J., Cheng, C.M., Wang, C.C.: Analysis and synthesis of switched nonlinear systems using the T–S fuzzy model. Appl. Math. Model. 34(6), 1467–1481 (2010)
Wang, T.C., Tong, S.C.: H∞ control design for discrete-time switched fuzzy systems. Neurocomputing 151, 184–188 (2007)
Long, L.J., Zhao, J.: Adaptive fuzzy output-feedback dynamic surface control of MIMO switched nonlinear systems with unknown gain signs. Fuzzy Sets Syst. (2015). doi:10.1016/j.fss.2015.12.006
Chiou, J.S.: Stability analysis for a class of switched large-scale time-delay systems via time-switched method. IEE Proc. Control Theory Appl. 153(6), 684–688 (2006)
Chang, Y.H., Yang, C.Y., Chan, W.S., Lin, H.W., Chang, C.W.: Adaptive fuzzy sliding-mode formation controller design for multi-robot dynamic systems. Int. J. Fuzzy Syst. 16(1), 121 (2014)
Wu, L.G., Wang, Z.D.: Guaranteed cost control of switched systems with neutral delay via dynamic output feedback. Int. J. Syst. Sci. 40(7), 717–728 (2009)
Yang, H., Jiang, B., Cocquempot, V.: A fault tolerant control framework for periodic switched non-linear systems. Int. J. Control 46(4), 117–129 (2009)
Li, Y.M., Tong, S.C.: Fuzzy adaptive backstepping decentralized control for switched nonlinear large-scale systems with switching jumps. Int. J. Fuzzy Syst. 17(1), 12–21 (2015)
Lian, J., Mu, C.W., Shi, P.: Asynchronous H∞ filtering for switched stochastic systems with time-varying delay. Inf. Sci. 224(1), 200–212 (2013)
Dong, J.X., Yang, G.H.: Dynamic output feedback image control synthesis for discrete-time T–S fuzzy systems via switching fuzzy controllers. Fuzzy Sets Syst. 160(4), 482–499 (2009)
Tian, E., Peng, C.: Delay-dependent stability analysis and synthesis of uncertain T–S fuzzy systems with time-varying delay. Fuzzy Sets Syst. 157(4), 544–559 (2006)
Wang, M., Zhao, J., Dimirovski, G.M.: Dynamic output feedback robust H∞ control of uncertain switched nonlinear systems. Int. J. Control Autom. Syst. 9(1), 1–8 (2011)
Yang, W., Tong, S.C.: Robust stabilization of switched fuzzy systems with actuator dead zone. Neurocomputing 173, 1028–1033 (2016)
He, X., Zhao, J.: Switching stabilization and H∞ performance of a class of discrete switched LPV system with unstable. Nonlinear Dyn. 76(2), 1–9 (2014)
Yang, W., Tong, S.C.: Output feedback robust stabilization of switched fuzzy systems with time delay and actuator saturation. Neurocomputing 164, 173–181 (2015)
Zheng, Q.X., Zhang, H.B.: Asynchronous H∞ fuzzy control for a class of switched nonlinear systems via switching fuzzy Lyapunov function approach. Neurocomputing 182, 178–186 (2016)
Cao, Y.Y., Lin, Z., Ward, D.G.: Anti-windup design of output tracking systems subject to actuator saturation and constant disturbances. Automatica 40(7), 1221–1228 (2004)
Zhai, D., An, L.W., Li, J.H., Zhang, Q.L.: Adaptive fuzzy fault-tolerant control with guaranteed tracking performance for nonlinear strict-feedback systems. Fuzzy Sets Syst. 302, 82–100 (2016)
Gao, S.G., Ning, B., Dong, H.R.: Fuzzy dynamic surface control for uncertain nonlinear systems under input saturation via truncated adaptation approach. Fuzzy Sets Syst. 290, 100–117 (2016)
Su, X., Shi, P., Wu, L., Song, Y.: A novel approach to filter design for T–S fuzzy discrete-time systems with time-varying delay. IEEE Trans. Fuzzy Syst. 20(6), 1114–1129 (2012)
Tsai, S.H., Jian, S.A.: Robust H∞ control for Takagi–Sugeno fuzzy systems with time-varying delays in state and input. Appl. Mech. Mater. 764–765, 624–628 (2015)
Cao, Y.Y., Lin, Z.L.: Robust stability analysis and fuzzy-scheduling control for nonlinear systems subject to actuator saturation. IEEE Trans. Fuzzy Syst. 11(1), 57–67 (2003)
Zhang, L.X., Gao, H.: Asynchronously switched control of switched linear systems with average dwell time. Automatica 46(5), 953–958 (2010)
Tanaka, K., Ikeda, T., Wang, H.O.: Fuzzy regulators and fuzzy observers: relaxed stability conditions and LMI-based designs. IEEE Trans. Fuzzy Syst. 6(2), 250–265 (1998)
Cao, Y.Y., Frank, P.M.: Analysis and Synthesis of nonlinear time delay systems via fuzzy control approach. IEEE Trans. Fuzzy Syst. 8(2), 200–211 (2000)
Li, L.L., Zhao, J., Dimirovski, G.M.: Observer-based reliable exponential stabilization and H∞ control for switched systems with faulty actuators: an average dwell. Nonlinear Anal. Hybrid Syst. 5(3), 479–491 (2011)
Liu, X.D., Zhang, Q.L.: New approaches to H∞ controller designs based on fuzzy observer for T–S fuzzy systems via LMI. Automatica 39(9), 1571–1582 (2003)
Mhaskar, P., Farra, N.H.E., Christofides, P.D.: Predictive control of switched nonlinear systems with scheduled mode transitions. IEEE Trans. Autom. Control 50(11), 1670–1680 (2005)
Acknowledgements
This work was supported by the National Natural Science Foundation of China (No. 61374113).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yang, J., Tong, S. Observer-Based Output-Feedback Control Design for a Class of Nonlinear Switched T–S Fuzzy Systems with Actuator Saturation and Time Delay. Int. J. Fuzzy Syst. 19, 1333–1343 (2017). https://doi.org/10.1007/s40815-017-0366-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40815-017-0366-2