
Abstract
In this study, a framework to monitor the volumetric fluctuation of the inland water body by the combination of a bathymetry map, an optical satellite imagery & multiple satellite altimetry measurements is presented. In spite of the recent studies in monitoring water level changes in lakes using satellite altimetry & optical satellite imagery, it’s still evident that these methods are limited to the water level, surface area and volume changes. However, to effectively study the lakes, it’s important to quantify the total lake volume. This hasn’t been possible as the existing satellite methods cannot estimate the bathymetry depth. The methodology was developed over Lake Victoria during 1993–2016. The results indicate that the water level, area, and volume of Lake Victoria decreased over the past 23 years. The water level shows a slight decrease (−0.005 m/year) of a total of −0.115 m from 1993 to 2016. The changes in water level translates to a reduction in lake area (−100 km2) and volume (−5 km3). Despite the inconsistent changes in area and volume, significant reduction occurred between 1998 and 2006 where (3484 km2) and (122.87 km3) reduction in area and volumes respectively were observed.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Lakes and reservoirs constitute essential elements of the hydrological and biogeochemical water cycles due to their basic ability to store, retain, clean, and provide water consistently (Crétaux et al. 2016). Therefore, there is a great need for long-term, continuous, spatially consistent and readily available data on lakes. Water resources such as lakes and rivers can be monitored using three approaches: in situ measurements, modelling, and remote-sensing observations (Baup et al. 2014; Crétaux et al. 2016; Jean-François et al. 2015; Messager et al. 2016; Sichangi et al. 2016; Song et al. 2015). In the recent years, there has been a decrease in the number of in situ gauges and the difficulty in modelling water resources on a global scale (because of complex mixing between inflows and outflows), therefore remote sensing estimates are of great importance is such cases (Alsdorf et al. 2007; Baup et al. 2014; Vörösmarty et al. 2001).
The recent developments in remote sensing have made it possible to obtain global land cover images of increasing quality and resolution, including the possibility to monitor spatiotemporal changes in lakes and wetland extents (Crétaux et al. 2016; Kang and Hong 2016). Besides the spatial extend, satellite radar altimetry has successfully monitored the height variations of continental surface water, such as lakes and rivers (Birkinshaw et al. 2014; de Oliveira Campos et al. 2001; Song et al. 2015). However, the developments are limited to estimating the areas, water levels & volumes with reference to the lowest water level. In addition, the observation of time series of water surface areas using remote sensing is limited to the temporal resolution of the satellite for instance 16 days for Landsat. The Table 1 summarize the hydrological parameters that can be estimated using remote sensing data.
In this study, in addition to the water level changes previously used in studying lakes (Avsar et al. 2016; Song et al. 2015), we monitor the surface area and volumetric fluctuation of the Lake Victoria by combining bathymetry map, optical satellite imagery (Landsat) & multiple satellite altimetry measurements. Our methodology enable estimates in the time series water surface area with a temporal resolution similar to the satellite altimetry. With the recent capabilities to derive satellite altimetry data from multiple data sources, the temporal resolution has been significantly enhanced. In turn, this will increase the temporal resolution in estimating the water surface area. In the subsequent sections, we describe the study area, material & methods followed by the results and finally the discussion.
Study area, materials and methods
Study area
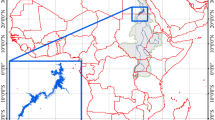
With a surface area of 68,800 sq km, Lake Victoria is Africa’s largest lake. In addition, it’s the largest tropical lake in the world, and the planet’s second largest freshwater lake (Kite 1982). This area forms part of three countries Kenya, Tanzania & Uganda (See Fig. 1). The lake receives most of its water from direct precipitation (Awange et al. 2008; Mistry and Conway 2003). The largest tributary is the Kagera River, which drains 60,000 km2 of the Ruanda-Burundi highlands, and the only major outflow exits through the Nile outlet at Jinja, Uganda (Stager et al. 2007).

Location map (Standley et al. 2014)
Satellite altimetry
Radar altimetry consists of vertical range measurements between the satellite and the surface. The altimeter satellite is placed on a repeat orbit and flies over a given region at regular time intervals (termed the orbital cycle). The altimeter emits a radar pulse and measures the two-way travel time from the satellite to the surface. The altimeter range (R) is therefore derived with a precision of a few centimeters. For instance, a case studies by (Jarihani et al. 2013; Santos da Silva et al. 2010) gave precision values of 0.12–0.40 m for Envisat, 1.07 m for Jason-1, and 0.96 m for Topex. However, precision can vary widely depending on the surface characteristics, for instance, the topography and surrounding vegetation. The satellite altitude (h) with respect to the reference ellipsoid is precisely known from orbit modeling. Altimeter measurements of surface topography are distorted, and therefore corrections are applied (∑e). For example, atmospheric propagation effects in the troposphere and the ionosphere, electromagnetic bias, residual geoid errors and inverse barometer effects can all distort measurements (Santos da Silva et al. 2010; Shum et al. 1995). Taking into account propagation delays from the interactions of electromagnetic waves in the atmosphere and geophysical corrections, the height of the reflecting surface (H) with respect to a reference ellipsoid can be estimated using Eq. (1) below:
The datasets used in this research were obtained from the Database for Hydrological Time series of Inland Waters (DAHITI) (Schwatke et al. 2015). DAHITI is a product of combined data from several altimetry missions i.e. Jason- 1, Jason- 2, Jason- 3 and Topex/Poseidon. It spans the period from January 1993 to December 2016. The altimetric measurements have been corrected for atmospheric effects (ionospheric delay and dry/ wet tropospheric effects) and geophysical processes (solid, ocean, and pole tides, loading effect of the ocean tides, sea state bias, and the Inverted Barometer response of the ocean).
Spectral images
Due to their high accuracies in extracting water surface extent, Landsat ETM + images scenes (path 170 row 060, path 170 row 061, path 170 raw 062, path 171 row 060 & path 171 row 060) covering the study area acquired on the 12th January 2010 were also adopted to monitor lake surface extent.
Bathymetry data
The bathymetry raster data (Fig. 2) was created by Hamilton et al. (2016) from running a CoKriging technique on points that were obtained from taking digitized points from an Admiral Bathymetry map and points collected in the field. These points were combined into the same file and had their depths converted to the same unit (meters). All points that were out of the Lake Victoria shoreline polygon were removed. The points that were marked as greater than the recorded depth were removed if the depth was less than 60.96.

Map generated using Hamilton et al. (2016) point data obtained from an Admiral Bathymetry map and points collected in the field
Method
In this study, a bathymetry map, satellite altimetry data and optical images were used to assess the changes in water level, area, and volume of Lake Victoria. First the water volume & surface area were quantified. This was made possible using the 3D analyst where the depth levels of the deepest point (Fig. 2) were increased at intervals of 0.5 m. The extracted volume & surface area measurements were then used to plot graphs of depth against volume (Fig. 3a) & depth against surface area (Fig. 3b).

Plots of: a The Lake depth (in meters) against the total water volume (in cubic kilometers), b The Lake depth (in meters) against the water surface area (in square kilometers)
From the plot in Fig. 3 a, Eq. (2) can be used to relate the depth (h) & the discharge (Q)
Whereas the Eq. (3) gives the relation between the surface area (A) & the depth (h)
The water surface area for the 12th January 2010 was then extracted from the Landsat ETM+ (Fig. 4). The Lake depth on this particular day was then estimated using the Eq. (3). The equation give a real solution 70.244 m and a complex solution 8.39193 ± 64.8794 i. The time series river depths were then estimated by reducing the satellite altimetry lake levels (Fig. 5a) to the real solution for depth i.e. 70.244 m. The satellite altimetry levels used were derived at a virtual station with coordinates (33°E, 1°S). Finally, the water volume & surface area during the 1993–2016 were estimated by substituting the reduced river depths in Eqs (2) & (3) respectively.

A mosaic of the Landsat ETM+ (acquired on the 12th January 2010) over the Lake Victoria

Plots of: a The time series water levels (in meters) extracted from multiple satellite altimetry dataset and referenced to the Eigen-6C3stat geoid model b And the time series Lake Depth (in meters) with reference to the deepest point in the Bathymetry map in Fig. 2
Results
The results indicate that the water level, area, and volume of Lake Victoria decreased over the past 23 years. During these period, the maximum water depth was 71.82 m whereas the lowest depth was 69.37 m (Fig. 5b).
The water level shows a slight decrease (−0.005 m/year) of a total of −0.115 m from 1993 to 2016 (Fig. 5a, b). The trend shows a sudden increase (1.65 m) during 1997 to 1998 followed by a significant decrease (−2.442 m) during 1998 to 2006 and then followed by an increase (2.14 m) during 2006 to 2016. Finally, there has been a decreasing trend since June 2016. There has also been a reduction in lake area (−100 km2) and volume (−5 km3) (Fig. 6). Despite the inconsistent changes in area and volume, significant reduction occurred during 1998 to 2006 where (3484 km2) and (122.87 km3) reduction in area and volumes are observed (Fig. 6).

Discussion
With the advent of satellite technologies, multiple satellite sensors enable researchers to monitor lake water level and area change that facilitate estimation of lake volume change (Crétaux and Birkett 2006; Crétaux et al. 2011; Schwatke et al. 2015). In this study, the time series water levels, Depth, surface area and volume were monitored with a bathymetry map, Landsat ETM+ & satellite altimetry data from 1993 to 2016. Therefore, the accuracy of our methodology is limited to the uncertainties associated with particular dataset used. For instance, the bathymetry data was created by running a Simple Kriging technique on points that were obtained from taking digitized points from an Admiral Bathymetry map and points collected in the field (Hamilton et al. 2016). Therefore, the accuracy of the resultant raster map (Fig. 2) is limited to the field point’s sampling interval and the pixel value, in this case 100 m. On the other hand, the accuracy of water surface estimates using Landsat is limited to its resolution i.e. 30 m. Finally the accuracy of water level changes is between 4 and 36 cm (Schwatke et al. 2015). Nonetheless, our methodology has proven that given the bathymetry Map, a single date Landsat ETM+ & time satellite altimetry data, the time series volumetric and surface at the same sampling rate as the satellite altimetry data, could be estimated. This is particularly important given the recent advances in deriving satellite altimetry data from multiple data sources (Schwatke et al. 2015). This means that the upcoming missions (Jason-3, Jason CS, Sentinel-3a and b, and SWOT) will likely increase the multiple data sources therefore densifying the time series observations (Sichangi et al. 2016). However, the biggest challenge with our method is limited information on the Lake bathymetry data, and in situation where the data is available, its restricted due to policy issues on data sharing.
References
Alsdorf DE, Rodríguez E, Lettenmaier DP (2007) Measuring surface water from space. Rev Geophys. doi:10.1029/2006RG000197
Avsar NB, Jin S, Kutoglu H, Gurbuz G (2016) Sea level change along the Black Sea coast from satellite altimetry, tide gauge and GPS observations. Geod Geodyn 7:50–55. doi:10.1016/j.geog.2016.03.005
Awange JL, Sharifi MA, Ogonda G, Wickert J, Grafarend EW, Omulo MA (2008) The falling lake victoria water level: GRACE, TRIMM and CHAMP satellite analysis of the lake basin water resources. Management 22:775–796. doi:10.1007/s11269-007-9191-y
Baup F, Frappart F, Maubant J (2014) Combining high-resolution satellite images and altimetry to estimate the volume of small lakes. Hydrol Earth Syst Sci 18:2007–2020. doi:10.5194/hess-18-2007-2014
Birkinshaw SJ, Moore P, Kilsby CG, O’Donnell GM, Hardy AJ, Berry PAM (2014) Daily discharge estimation at ungauged river sites using remote sensing. Hydrol Processes 28:1043–1054. doi:10.1002/hyp.9647
Bjerklie DM, Lawrence Dingman S, Vorosmarty CJ, Bolster CH, Congalton RG (2003) Evaluating the potential for measuring river discharge from space. J Hydrol 278:17–38. doi:10.1016/S0022-1694(03)00129-X
Bjerklie DM, Moller D, Smith LC, Dingman SL (2005) Estimating discharge in rivers using remotely sensed hydraulic information. J Hydrol 309:191–209. doi:10.1016/j.jhydrol.2004.11.022
Crétaux J-F, Birkett C (2006) Lake studies from satellite radar altimetry. Comptes Rend Geosci 338:1098–1112. doi:10.1016/j.crte.2006.08.002
Crétaux JF et al (2011) SOLS: a lake database to monitor in the Near Real Time water level and storage variations from remote sensing data. Adv Space Res 47:1497–1507. doi:10.1016/j.asr.2011.01.004
Crétaux J-F, Abarca-del-Río R, Bergé-Nguyen M, Arsen A, Drolon V, Clos G, Maisongrande P (2016) Lake volume monitoring from space surveys. Geophysics 37:269–305. doi:10.1007/s10712-016-9362-6
de Oliveira Campos I, Mercier F, Maheu C, Cochonneau G, Kosuth P, Blitzkow D, Cazenave A (2001) Temporal variations of river basin waters from topex/poseidon satellite altimetry. application to the amazon basin comptes rendus de l’Académie des Sciences—Series IIA—earth and planetary. Science 333:633–643. doi:10.1016/S1251-8050(01)01688-3
Hamilton S, Munyaho AT, Krach N, Glaser S (2016) Bathymetry TIFF, Lake Victoria Bathymetry, raster, 2016. Harvard Dataverse. doi:10.7910/DVN/SOEKNR
Jarihani AA, Callow JN, Johansen K, Gouweleeuw B (2013) Evaluation of multiple satellite altimetry data for studying inland water bodies and river floods. J Hydrol 505:78–90. doi:10.1016/j.jhydrol.2013.09.010
Jean-François C, Sylvain B, Adalbert A, Muriel B-N, Mélanie B (2015) Global surveys of reservoirs and lakes from satellites and regional application to the Syrdarya river basin. Environ Res Lett 10:015002
Kang S, Hong SY (2016) Assessing seasonal and inter-annual variations of lake surface areas in Mongolia during 2000–2011 using minimum composite MODIS NDVI. PLoS ONE 11:e0151395. doi:10.1371/journal.pone.0151395
Kite GW (1982) Analysis of lake victoria levels. Hydrol Sci J 27:99–110. doi:10.1080/02626668209491093
Messager ML, Lehner B, Grill G, Nedeva I, Schmitt O (2016) Estimating the volume and age of water stored in global lakes using a geo-statistical approach. Nat Commun 7:13603. doi:10.1038/ncomms13603. http://www.nature.com/articles/ncomms13603#supplementary-information
Mistry VV, Conway D (2003) Remote forcing of East African rainfall and relationships with fluctuations in levels of Lake Victoria. Int J Climatol 23:67–89. doi:10.1002/joc.861
Santos da Silva J, Calmant S, Seyler F, Rotunno Filho OC, Cochonneau G, Mansur WJ (2010) Water levels in the Amazon basin derived from the ERS 2 and ENVISAT radar altimetry missions. Remote Sens Environ 114:2160–2181. doi:10.1016/j.rse.2010.04.020
Schwatke C, Dettmering D, Bosch W, Seitz F (2015) DAHITI—an innovative approach for estimating water level time series over inland waters using multi-mission satellite altimetry. Hydrol Earth Syst Sci 19:4345–4364. doi:10.5194/hess-19-4345-2015
Shum CK, Ries JC, Tapley BD (1995) The accuracy and applications of satellite altimetry. Geophys J Int 121:321–336. doi:10.1111/j.1365-246X.1995.tb05714.x
Sichangi AW et al (2016) Estimating continental river basin discharges using multiple remote sensing data sets. Remote Sens Environ 179:36–53. doi:10.1016/j.rse.2016.03.019
Song C, Huang B, Ke L (2015) Heterogeneous change patterns of water level for inland lakes in High Mountain Asia derived from multi-mission satellite altimetry. Hydrol Processes 29:2769–2781. doi:10.1002/hyp.10399
Stager JC, Ruzmaikin A, Conway D, Verburg P, Mason PJ (2007) Sunspots, El Niño, and the levels of Lake Victoria, East Africa. J Geophys Res. doi:10.1029/2006JD008362
Standley CJ, Goodacre SL, Wade CM, Stothard JR (2014) The population genetic structure of Biomphalaria choanomphala in Lake Victoria, East Africa: implications for schistosomiasis transmission. Parasites Vectors 7:524. doi:10.1186/s13071-014-0524-4
Vörösmarty C et al. (2001) Global water data: a newly endangered species. Eos Trans Am Geophys Union 82:54–58. doi:10.1029/01EO00031
Acknowledgements
All sources of funding of the study should be disclosed. Please clearly indicate grants that you have received in support of your research work. Clearly state if you received funds for covering the costs to publish in open access.
Author Contributions
A.W.S. and G.O.M. designed the study, methodology and modelling approach, and collected data; A.W.S. performed the analysis and interpretation, and wrote the initial draft of the manuscript; G.O.M. revised the manuscript.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Rights and permissions
About this article

Cite this article
Sichangi, A.W., Makokha, G.O. Monitoring water depth, surface area and volume changes in Lake Victoria: integrating the bathymetry map and remote sensing data during 1993–2016. Model. Earth Syst. Environ. 3, 533–538 (2017). https://doi.org/10.1007/s40808-017-0311-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40808-017-0311-2