
Abstract
This paper presents the results of a laboratory study on the three-dimensional velocity field of circular non-buoyant multiple jets discharged into a perpendicular crossflow. Two to four momentum jets were taken in a group with spacings five times the jet diameters and the three-dimensional velocity field was measured using an Acoustic Doppler Velocimetry (ADV) system to investigate the interaction of jets with crossflow. The rear jets were found to be less deflected than the front one due to the reduction of effective crossflow velocity because of the sheltering effect as well as the entrainment demand. For a jet spacing of 5 times of jet diameter, the effective crossflow to upstream approach velocity ratios were found to vary between 0.4 and 0.6 regardless of the momentum length scale and the number of jets in a group. The rates of velocity reduction in between jets observed in this study, were favorably compared with previous results, where velocity was inferred from Laser Induced Fluorescence (LIF) measurements. The findings of this study can be used to predict the jet trajectories and dilutions of multiple jets in crossflow as well as modeling of discharges from multiport diffusers. This work will be helpful for the engineers and other scientists dealing with the disposal of wastewater, thermal effluents, or air pollutants into flowing environments.
Highlights
-
Velocity field of multiple jet groups in crossflow were measured using an ADV system
-
Two to four momentum jets at spacings of 5D were discharged in crossflow
-
The rear jets were found less deflected than the front one due to the sheltering effect
-
The crossflow velocity was found to reduce to about half after passing the first jet
-
Velocity reductions in between jets were favorably compared with previous results
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Submerged outfalls are frequently used to dump partially treated effluent into the ocean, coastal seas, estuaries, lakes, and rivers. A multiport diffuser, which is more typical, a single port, or a limited number of ports could make up a submerged coastal outfall (Ali 2003, 2010; Yu et al. 2003; Seo et al. 2001; Kristol and Kimber 2021). The overall area available for jet entrainment is enhanced by discharging the effluent through several ports (Baum and Gibbes 2020; Abessi and Roberts 2018; Lee 2012). As a result, ambient water quickly mixes and dilutes the effluent. An effective environmental mixing tool utilized frequently in the wastewater disposal system is a submerged multiple jet group. Particularly, enormous amounts of condenser cooling water (thermal effluent) from steam-electric power generation plant are frequently released into the ocean's bottom in the form of numerous hot jets (approximately 40 m3/s per 1000 MW). A submerged wastewater discharge system in crossflow is sketched in Fig. 1. In addition to wastewater discharge, multiple jets in crossflow are seen in a variety of natural geophysical events and human-made activities. In stratified lakes, pure oxygen is occasionally injected into the bottom layer where the water quality is poor to increase the soluble oxygen level. In shallow marine systems (such as estuaries), benthic bivalves are frequently utilized to control the biomass of phytoplankton. Previous research (Monismith et al. 1990) has shown that the behaviors of bivalve siphonal currents are comparable to a jet group in crossflow. Significant research has also been done on the multiple jets with the crossflow in various areas of aeronautics. Examples include the fuel injection into combustion chambers, the cooling jets on turbine blades, and the lift jets used by V/STOL aircraft during takeoff and landing in heavy winds. Abessi and Roberts (2017) reported the experimental results on brine disposal from desalination plants through multiport diffusers into flowing currents.

Schematic diagram of a submerged wastewater discharge system
Depending on the relative orientation of jet discharging direction with that of ambient current, the diffuser (as well as jet groups) can be classified as coflowing, perpendicular crossflowing or Tee, alternating, oblique and staged diffuser (Ali 2003). A combination of different types of orientations in a single diffuser (such as, rosette type) is also used (Abessi and Roberts 2018; Lai et al. 2011). However, among different orientations, one of the common designs in a coastal situation is to align all the jets perpendicular to the along-shore ambient current, so that the wastewater is directed away from the shoreline to minimize environmental impact (the Tee-diffuser design). The mixing performance of such a design is also symmetrical with respect to ambient current direction (i.e., flood or ebb). Adams (1982) studied the dilution characteristics and the plume trajectory of multiple jets in crossflow. He found that the near field dilution tends to decrease with increasing ambient current. Miller and Brighouse (1984) reported that the dilution equations are not accurate in strong ambient conditions. Seo et al. (2001) experimentally studied the dilution characteristics of multiple jets in shallow water. They found that when the momentum ratio of the ambient current to the effluent discharge (mr) is less than 1, dilution decreases with the momentum ratio. But when mr is greater than 1, dilution increases with mr. They also found that under very strong ambient current, the dilution asymptotically approaches the stagnant water dilution and all existing dilution equations fail to predict the dilution under strong ambient current. Abessi and Roberts (2017) carried out experimental investigations on the interaction of multiple jets with flowing currents and reported that the dilutions are dependent on port spacing.
Li and Lee (1991) developed a depth-averaged finite element flow model with multiple jets modeled as momentum sources. Dilution was inferred from the induced flow through the diffuser. The agreement between the modeling results and the experiments was satisfactory for weak to moderate currents. However, the complex 3D jet—current interaction zone cannot be modeled due to the 2D momentum source presentation of jets. Kim and Seo (2000) used a 3D model with hydrostatic pressure assumption to study the mixing induced by a co-flowing multiport diffuser. The k-l model was used in parameterizing vertical turbulence. The model performance was satisfactory for the coflowing diffuser but it was poor for the present problem of multiple jets in crossflow. This is because close to the jet the flow is highly three-dimensional and the pressure will no longer be hydrostatic. Thus, to resolve the issue of the performance of this important mixing device in crossflow, it is necessary to conduct an experimental study on the highly complicated three-dimensional flow interaction of multiple jets with the crossflow in the region close to the diffuser. As an initial step to understand the jet interaction phenomena close to the diffuser, this study focuses on the multiple jet groups in a crossflow in the absence of strong boundary effect.
Although some studies have been carried out on parallel-oriented double jets in crossflow to enhance the effectiveness of dilution zone mixing in a gas turbine combustion chamber and to comprehend the characteristics of effluent discharging into riverbeds (Holderman and Walker 1977; Savory and Toy 1999; Moawad and Rajaratnam 1998; Choi et al. 2016), only a few studies on jets in a line perpendicular to the crossflow have been published (Lai and Lee 2010; Yu et al. 2006). Kamotani and Greber (1974) reported that when two closely spaced jets are arranged parallel to the crossflow, the rear jet is in the wake of the front one, where the crossflow velocity is very small. As a result, the front jet meets the back jet nearly undeflected, and the two jets are immediately combined. These findings were based on smoke photographs and some limited temperature measurements of two jets in crossflow in a wind tunnel.
Monismith et al. (1990) studied the characteristics of siphon-jet flows using fluorescence-based flow visualization in a model study of bivalve siphonal currents and reported that the hydrodynamic behavior of bivalve siphonal currents is comparable to that observed for multiple jets in crossflow. They asserted that the second jet rose higher than the first jet because it was shielded from crossflow by the first jet. Li and Lee (1991) reported that the blocking effect of the individual jets on the ambient flow seemed to be significant. They continued by stating that the development of recirculation eddies and the observed flow divergence at the source's leeward end strongly implies the relevance of the multiple jet group's blocking action. The formation of wake because of the sheltering effect downstream of jets in crossflow was also reported in recent studies (Kristol and Kimber 2021; Lai et al. 2011; Lai and Lee 2010).
Although the sheltering effect of leading edge jet to the rear jets has been reported in previous works, detail quantitative analysis has not been made so far, and the three-dimensional jet interaction with the crossflow is still unresolved. Very few quantitative analyses for three-dimensional jet interaction phenomena with the crossflow have been conducted (Yu et al. 2006; Ben Meftah and Mossa 2018). Yu et al. (2006) explained the interaction of jets based on measured concentration field of multiple jet groups in crossflow, where the crossflow velocity in front of the jets were determined indirectly based on the trajectories from Laser Induced Fluorescence (LIF) images. In this paper, the three-dimensional velocity field of multiple jet groups in crossflow was measured by Acoustic Doppler Velocimetry (ADV) system and is presented to explain the interaction phenomena of jets, since the crossflow velocities between the adjacent jets were measured directly. The findings of this study can be used to predict the jet trajectories and dilutions of multiple jets in crossflow as well as modeling of discharges issuing from multiport diffuser. This work will be helpful for the engineers and other scientists dealing with the disposal of wastewater, thermal effluents, or air pollutants into flowing environments.
2 Flow Regimes of a Multiple Jet Group
The flow regimes of a single momentum jet in crossflow are depicted in Fig. 2. Here, x is the direction of crossflow (or stream-wise direction), and y is the initial jet direction (which can be either depth-wise or lateral direction depending on the jet orientation). Consider that the non-buoyant jet has a jet diameter D and initial velocity u0, and is discharged perpendicularly to a steady uniform ambient crossflow of velocity Ua. Thus, the initial volume flux and kinematic momentum flux of the jet can be defined as Qo = (π/4)D2u0 and M0 = Q0u0, respectively. The characteristic crossflowing momentum length scale for the jet can be explained as lm = M01/2/Ua; the source geometry length scale lQ = Q0/M01/2.

Flow regimes of a momentum jet in crossflow system
One non-buoyant jet flow phenomenon can be explained by two different flow regimes based on the momentum length scale at which the momentum induced velocity (~ Mo1/2/y) decays to its ambient value. When y/lm is less than 1, a region is referred to as a momentum-dominated near field (MDNF) region, where the impact of initial jet momentum is more significant than that of crossflow. As a result, mixing is controlled by the shear entrainment caused by initial momentum, and the flow is comparable to a momentum jet that has been slightly advected. The crossflow causes the jet to bend over in the momentum dominated far field (MDFF) region (when y/lm > > 1), where the effect becomes noticeable. According to earlier research (Wong 1991), the flow behavior in succeeding bent-over phase portions is comparable to that of an equivalent line puff at similar parts. The fluid motion produced by the instantaneous discharge of a source of line momentum in a still environment is known as a line puff. The puff expands in size as it goes due to its momentum, generates a double vortex flow, and interacts with its environment.
A definition sketch for a multiple-jet group in crossflow is shown in Fig. 3. In the group, a number of turbulent non-buoyant jets are considered having the jet spacing s, each of initial velocity u0, diameter D, and discharged perpendicular to a steady uniform ambient Ua. Qo and Mo are the initial volume flux and kinematic momentum flux for each jet, respectively. Here, U1, U2, U3 are the effective crossflow velocities just upstream of the downstream jets, i.e., upstream of 2nd, 3rd and 4th jet, respectively.

Definition sketch of a four-jet group in crossflow
As shown in Fig. 3(a), there are three different flow regimes created when a multiple jet group discharges in a crossflowing environment. They are pre-merging, merging, and post-merging regions. The first area where the separate jet flow paths can be clearly seen is the pre-merging region. The properties of a single jet, i.e., momentum-dominated near field and momentum-dominated far field phenomena based on the momentum length scale, can be used to explain this region. In the merging zone, the jets have lost their distinct identities and are combined to produce a jet with new features. The post-merging zone is considered as a vertically well mixed two-dimensional flow region, and the initial non-merged region is neglected in the traditional multiport diffuser analysis for shallow water (Seo et al. 2001; Taherian and Mohammadian 2021). Previous studies (Lai et al. 2011; Lee and Chu 2003; Li and Lee 1991) have shown that while this assumption works well for coflowing jets, the performance is not satisfactory for the Tee-diffuser, especially for jets with strong crossflow. According to Wood et al. (1991), the early non-merged zone is crucial for understanding the mixing behavior of multiport diffusers. This study mainly focused on the interaction of jets in pre-merged zone using measured 3D velocity field.
3 Experimental Techniques
The experiments were performed in a 15 m long, 0.4 m wide and 0.5 m deep re-circulating flume. A multiple jet group was formed by issuing water through a group of circular nozzles of 1 cm inner diameter mounted on a diffuser; the number of nozzles varied from 2 to 4 in a group with spacings of 5 cm. The 8 cm long nozzles were made of brass and mounted tightly on Perspex top cover of half circular diffuser, which was also made of perspex. 2 to 4 nozzles were used at a time and remaining holes on diffuser can be plugged by Perspex stoppers. The jet groups were discharged horizontally in the absence of strong boundary effect and a space of about 26 cm was allowed in front of the diffuser. Although a small angle between the nozzle and the horizontal plane was provided in the design, the diffuser was placed at a suitable angle so that the nozzle discharged the effluent at a 0° angle with the horizontal.
The level of the jet axis was 10 cm above the flume bottom and the water depth was maintained at around 30 cm. The flume water was directly pumped in the diffuser for discharge into the flume, thus there was no temperature difference between ambient and jet water. To ensure the flow uniformity for all the jets, the fluid was fed from both sides of the diffuser. The flow rate was monitored by a calibrated rotameter. Figure 4 shows the LIF image of a four-jet group in crossflow. The same experimental set-up has been used for the velocity measurement in this study.

An experimental (LIF) photograph of multiple jet group in crossflow
The Acoustic Doppler Velocimetry (ADV), an acoustic sensing technique to measure flow in remote sampling volume, was used to measure the velocity field. A full set of data collection, data conversion and diagnostic software is included with all ADVs. The software displays the real time and time-filtered velocity, the standard deviation of velocity, and a correlation factor to indicate the quality of data. Data are stored in the hard disk of a user-supplied computer with full-sized ISA slots. Data are analyzed by using Excel and Matlab software. The ADVLab by NORTEK AS, software version 2.6 was used in this study. The measured flow was practically undisturbed by the presence of the probe. Data were available at an output rate of 25 Hz. and the 3D velocity range was ± 2.5 m/s. The commonly used 3D down looking probe has been used in this experiment. The acoustic beams were oriented so that the receiving beams intercepted the transmitting beam at a point located at 10 cm (for 10 cm probe) in front of the sensor. The velocity at each point was measured for a period of 1 min. For a two-jet group, the velocity measuring grid in the x–y plane is shown in Fig. 5. Five sections are considered in x–z plane.

Typical Velocity measuring grid in x–y plane (for a two-jet group)
For measuring the effective crossflow velocities using ADV, a maximum error of about 1% is estimated. Although the crossflow velocities (velocities in x direction) are measured with a low percentage of error with an ADV correlation factor 96% to 99%, the 3D velocities in the highly turbulent region, especially in the region where two adjacent jets are going to merge, have a low correlation factor and a high standard deviation, because, in this region, the velocity fluctuates following the instantaneous behavior of the jet flow. A maximum of about 6% error for velocity measurement is estimated for this region.
To interpret the jet interaction, Yu et al. (2006) studied the trajectories of jets at different positions in a group using LIF experiments, where the trajectories were compared with those predicted for a suitable value of crossflow velocity by model (VISJET), and the crossflow velocity between two adjacent jets were inferred. It should be noted that VISJET is a Lagrangian model developed for analysis and prediction of average characteristics and dilution of jet, which has been tested extensively against theory and experimental data (Lee and Chu 2003). It is reported that as all the jets in a group have the same initial momentum, the different behaviours of jets are, of course, due to the variation of ambient velocity. Therefore, using VISJET model, for the same initial jet momentum, the jet trajectories were predicted for different crossflow velocities and were compared with measured trajectories of LIF images, and the crossflow velocity for the trajectory that gave the best comparison was estimated. An error minimization method (least–square) was used for trajectory comparison.
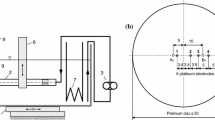
Laser-induced fluorescence (LIF) Technique is basically a flow visualization technique by applying a planar laser sheet passing through the center plane of dyed jets, from which details of the global flow features can be obtained. Figure 6 shows the schematic set up for a typical LIF experiments. In the experiments by Yu et al. (2006), horizontal laser sheet (about 2 mm thick) was produced from a 5 W argon-ion laser with a cylindrical lens and illuminates the horizontal plane of symmetry of the non-buoyant jet group. The LIF pictures were taken with a charge coupled device (CCD) camera mounted above the flume in a downward orientation. The dye concentration was controlled and the laser sheet intensity was calibrated so that concentration levels can be derived precisely from the brightness levels. Rhodamine-6G (C28H31N2O3Cl) with molecular weight of 479 was used as the fluorescent dye. The flow images as well as background images were digitized by a monochromic frame grabber, Data translator model DT3155. The intensity of fluorescence was measured as gray level of the digitized image and the mixing was quantified by calibrating the fluorescence level with the concentration.

Schematic diagram of LIF experimental setup
In this study, the experimental set-up and flow conditions are the same used at previous work by Yu et al. (2006). The measured velocity by ADV is compared with the inferred velocity from LIF images reported in Yu et al. (2006).
4 Results and Discussions
4.1 Velocity Field in x–y Plane
The global velocity fields of multiple jet groups in cross flow were measured with a grid of 2.5 cm spacing in each direction. The velocities at x, y and z directions are denoted as U, V and W respectively. The U-V velocity vectors for some selected cases are shown in Figs. 7, 8 and 9. The trajectories of individual jets are clearly understandable from these figures. The jets are found to be influenced by crossflow differently depending on their position in a group. The vectors indicate that the rear jets are less deflected than the leading-edge jet on the windward side of the jet group. A significant reduction of crossflow velocity in between two jets, compared to the initial ambient velocity Ua, is also remarkable in vector plots.

Velocity vector of two jet group (lm/D = 5.4)

Velocity vector of three jet group (lm/D = 6.2)

Velocity vector of four jet group (lm/D = 6.2)
The U-V velocity vector overlapping with normalized U contours for different jet groups and various momentum lengths are shown in Figs. 10, 11 and 12. The effective crossflow velocity ratio (U1,2,3/Ua) in between jets were found to follow 0.3 to 0.6 contour lines. A stagnation point with a very small U component is observed in between jets as well as after the last jet, at the region where the front one is just going to bent. This is because of the less supply of cross flow due to sheltering as well as entrainment demand of front jet. It seems to be a cause of non-uniform U-velocity distribution at any section in between jets.

U-V Velocity vector overlapping with U velocity (two-jet group, lm/D = 12.2)

U-V Velocity vector overlapping with U velocity (three-jet group, lm/D = 6.2)

U-V Velocity vector overlapping with U velocity (4 = four-jet group, lm/D = 6.2)
4.2 Velocity Field in x–z Plane
The cross-sectional velocity measurement of the flow field gives a more detail description about the interaction of jets with the surrounding environment. The x–z plane velocities for y/D = 1.0, 3.5 and 6.0 for a two-jet group was measured. The U-W velocity vector overlapping with V and U velocity contours for measured sections are shown in Fig. 13, 14, 15 and 16. From the U contours, it is confirmed that the U velocity in between jets increases with increasing distance towards next jet, which is also seen in U contours for x–y plane. The maximum effective cross current in between jets for section y/D = 3.5 is found higher than that for section at y/D = 6.0. It also reveals that the effective cross current is not uniform with y.

U-W Velocity vector overlapping with V contour at y/D = 3.5 (two-jet group, lm/D = 5.4)

U-W Velocity vector overlapping with U contour at y/D = 3.5 (two-jet group, lm/D = 5.4)

U-W Velocity vector overlapping with V contour at y/D = 6.0 (two-jet group, lm/D = 5.4)

U-W Velocity vector overlapping with U contour at y/D = 6.0 (two-jet group, lm/D = 5.4)
The streamlines of surrounding ambient fluid were seen to be deviated toward the jet to fill up the region obstructed by the front jet as well as to supply the flow for the entrainment of the rear jet. Again, it can be noted that the region in between jets is a low-pressure region, which is caused due to less supply of upstream water through the jet because of its sheltering as well as entrainment demand.
4.3 Effective Crossflow Velocity between Jets
The effective crossflow velocities in between jets of a jet group were measured in an emphasized manner. Special care was taken to choose the measuring section, which is free from the influence of spreading area of front and rear jets. The measuring sections were chosen at 3.75D distance downstream from front jet and 1.25D upstream from rear jet. The section for measuring effective crossflow velocities between two jets as well as velocity characteristics at the location where two jets are going to merge, are shown in Fig. 17. From the LIF experiments it is seen that the outer layers of two jets are merged first and gradually approaching the centerline. From Fig. 17, it is observed that the U-velocity components of the front jet and the rear jet are opposite to each other; thus, at merging some portions of U-velocity are nullified by the second jet. When merging occurs at the outer most layer where velocity is very small, the opposite U-component (from the rear jet) is less, and it (negative U-velocity) increases with the strength of jet velocity. For this reason, the crossflow velocity is seen to be decreasing with y. The measuring sections and measuring points along y-axis are shown in Fig. 18.

Section for measuring effective crossflow velocity between two jets and characteristics of velocity at merging of two-jets (jet boundary from LIF images for 2-jet group, lm/D = 5.4)

The selective Sections and points in between jets to measure the effective crossflow
In the previous section, it was observed that the magnitude of effective crossflow velocities in between adjacent jets at different points along the y-axis is not uniform. Therefore, the effective crossflow velocity at a section was determined by integrating the point velocities along the y-axis for the pre-merging region. Mathematically, the effective crossflow velocity at any section is given by:
where, U(y) is the crossflow velocity and ‘dy’ is the spacing between two points in a section. The distance between the nozzle exit and the starting point of merging with previous jet is taken as the value of ‘h’ and for the present purpose, the cross-flowing velocity was also measured up to this distance. The measured effective crossflow velocities from ADV system are shown in Table 1.
It is revealed that the effective crossflow velocity in between two jets is reduced to approximately half of that of the approaching velocity, Ua, for the jet spacing to diameter ratio of 5. The effective crossflow velocity is also observed to decrease in the leeward direction; the average value of U1/Ua, U2/Ua and U3/Ua were found as 0.47, 0.45 and 0.45, respectively. The ratio U1,2,3/Ua stays almost constant regardless of lm (Fig. 19).

Effective crossflow velocity ratio in between jets in a jet group
4.4 Comparison with LIF Experimental Results of Yu et al. (2006)
It is reported that the LIF experimental results and the concentration contours for multiple jet groups in crossflow are available in Yu et al. (2006). The measured velocity fields in this study for two- and four-jet groups are compared with the concentration contours (for the nearly same experimental conditions) by superposing the velocity vector plot with LIF contours (Figs. 20 and 21). As can be seen, they agree well and are shown almost identical to each other.

The velocity vectors superimposed with concentration field (two-jet group, lm/D = 5.4 and 5.2 for velocity and concentration fields, respectively)

The velocity vectors superimposed with concentration field (four-jet group, lm/D = 6.2 and 6.5 for velocity and concentration field, respectively)
In Fig. 22, the measured effective crossflow velocity ratios U1/Ua, U2/Ua, U3/Ua (commonly denoted as Ur/Ua) are compared with that of inferred from jet trajectories of LIF experiments by Yu et al. (2006). It is observed that Ur/Ua varies between 0.4 and 0.6 regardless of the momentum length scale and number of jets in a group. The crossflow velocity between adjacent jets measured by ADV are found about 7% lower than the velocity inferred from the trajectory comparison of LIF experiments. The trend line in the figure shows that this discrepancy is mainly in the low lm region.

Comparison of effective crossflow velocities in between jets, inferred from LIF measurements vs. depth averaged velocity by ADV measurements
In this study, the 3D velocity measurement by ADV was made for 5D spacing of jets only. The effect of spacing on the effective crossflow velocity was not studied. Yu et al. (2006) inferred the effective crossflow velocity for different jet spacing in a two-jet group and reported that for S/D = 5 ~ 15, the variation of Ur/Ua is not significant, though it is significant for S/D < 5.
5 Conclusions
When multiple jets are discharged in line into a perpendicular crossflow, the interaction of jets and the flow sheltering by the leading-edge jet on the windward side of the jet group can lead to significant changes of jet flow behavior. In a jet group, before the merging becomes significant, the trajectories of rear jets were found less deflected than the front one due to the reduction of effective crossflow velocity because of the sheltering effect as well as the entrainment demand.
For a jet spacing of 5 jet diameters, the ratio of effective crossflow velocity between adjacent jets to the approach velocity was found almost constant (≈0.5), regardless of the initial momentum flux and approach velocity. The rate of velocity reduction in between jets was favorably compared with previous result of LIF measurements. The interaction of jets explained above should be considered in the modeling of multiple jets in crossflow.
Data Availability
It contains experimental data, which is a part of the author’s M.Phil. thesis. The data that support the findings of this study are available by the author upon reasonable request.
References
Abessi O, Roberts PJW (2017) Multiport diffusers for dense discharge in flowing ambient water. J Hydraul Eng 143:04017003
Abessi O, Roberts PJW (2018) Rosette diffusers for dense effluents in flowing currents. J Hydraul Eng 144:06017024
Adam EE (1982) Dilution analysis for unidirectional diffusers. J Hydr Div, ASCE 108(HY3):327–341
Ali MS (2010) Conceptual Model for the sheltering effect of leading jet in a multiple jet group with crossflow. J Eng Sci 1(2):35–44
Ali MS (2003) Mixing of a non-buoyant multiple jet group in crossflow, M.Phil. Thesis, The University of Hong Kong, Hong Kong
Baum MJ, Gibbes B (2020) Field-scale numerical modeling of a dense multiport diffuser outfall in crossflow. J Hydraul Eng 146:05019006. https://doi.org/10.1061/(ASCE)HY.1943-7900.0001635
Ben Meftah M, Mossa M (2018) Turbulence measurement of vertical dense jets in crossflow. Water 10(3):286. https://doi.org/10.3390/w10030286
Choi KW, Lai CCK, Lee JHW (2016) Mixing in the intermediate field of dense jets in cross currents. J Hydraul Eng 142:04015041
Holderman JD, Walker RE (1977) Mixing of row of jets with a confined crossflow. AIAA J 15(2):243–249
Kamotani Y, Greber I (1974) Experiments on confined turbulent jets in cross flow, NASA Contractor Report, NASA CR-2392
Kim DG, Seo IW (2000) Modeling the mixing of heated water discharged from a submerged multiport diffuser. J of Hydr Res 38(4):259–269
Kristol PJ, Kimber ML (2021) Cylinders and jets in crossflow: Wake formations as a result of varying geometric proximities featured. Phys Fluids 33:055106. https://doi.org/10.1063/5.0047790
Lai ACH, Lee JHW (2010) Multiple tandem jet interaction in a crossflow. J Hydrodyn Ser B 22((5), Suppl. 1):639–643. https://doi.org/10.1016/S1001-6058(10)60007-8
Lai ACH, Yu D, Lee JHW (2011) Mixing of a rosette jet group in a crossflow. J Hydr Eng 137:787–803
Lee JHW (2012) Mixing of multiple buoyant jets. J Hydraul Eng 138(12):1008–1021. https://doi.org/10.1061/(ASCE)HY.1943-7900.0000560
Lee JHW, Chu V (2003) Turbulent jets and plumes - A Lagrangian approach. Kluwer Academic Publishers, Boston. VISJET web site http://www.aoe-water.hku.hk/visjet. Accessed 09 Sept 2021
Li CW, Lee JHW (1991) Line momentum source in crossflow. Int J Eng Sci 29(11):1409–1418
Miller DS, Brighouse BA (1984) Thermal discharges: A guide to power plant cooling water discharges into rivers, lakes and seas, BHRA Fluid Engineering series, vol 11. British Hydrodynamic Research Association, London
Moawad AK, Rajaratnam N (1998) Dilution of multiple non-buoyant circular jets in crossflows. J Env Eng., ASCE 124(1):51–58
Monismith SG, Koseff JR, Thompson JK, O’Riordan CA, Nepf HM (1990) A study of model bivalve siphonal currents. Limnol Oceanogr 35(3):680–696
Savory E, Toy N (1999) Real-time video analysis of twin jets in a crossflow. J Fluid Eng Trans ASME 113:68–72
Seo IW, Kim HS, Yu D, Kim DS (2001) Performance of tee diffusers in shallow water with crossflow. J Hydr Eng ASCE 127(1):53–61
Taherian M, Mohammadian A (2021) buoyant jets in cross-flows: review, developments, and applications. J Mar Sci Eng 9:61. https://doi.org/10.3390/jmse9010061
Wong CF (1991) Advected line thermals and puffs, M. Phil Thesis, The University of Hong Kong, Hong Kong
Wood IR, Davidson MR, Chen CW (1991) The behavior of merging plumes from an outfall diffuser, Environmental Hydraulics V1, Lee and Cheung eds, Balkema, Rotterdam, 13–40
Yu D, Ali MS, Lee JHW (2003) Experiments on interaction of multiple jets in crossflow, 16th ASCE Engineering Mechanics Conference, July 16–18, 2003. The University of Washington, Seattle, USA
Yu D, Ali MS, Lee JHW (2006) Multiple tandem jets in cross-flow. J Hydraul Eng ASCE 132(9):971–982. https://doi.org/10.1061/(ASCE)0733-9429(2006)132:9(971)
Acknowledgements
The author would like to acknowledge the experimental facilities provided by The University of Hong Kong, Hong Kong. The author also would like to acknowledge Professor Joseph H. W. Lee, Former Redmond Chair of Civil Engineering Department, The University of Hong Kong, Hong Kong for his guidance and valuable suggestions to perform the experiments.
Funding
This research is a part of M. Phil. research work of the author carried out in the University of Hong Kong, Hong Kong, China. The author did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors except of a Post-graduate scholarship from the University.
Author information
Authors and Affiliations
Contributions
It is a submission by a single author. Therefore, this declaration is ‘Not Applicable’.
Corresponding author
Ethics declarations
Ethical Approval
Not Applicable.
Competing interests
The author declares that there are no relevant financial or non-financial competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Ali, M. Velocity Field of Submerged Multiple Non-buoyant Jet Groups in Crossflow. Environ. Process. 10, 9 (2023). https://doi.org/10.1007/s40710-023-00623-0
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s40710-023-00623-0