
Abstract
The triboelectric effect utilizes the electric potential of materials to generate an electrical output through electrostatic induction between the two oppositely charged surfaces, which grants them unique self-powered characteristics. By utilizing this effect, self-powered tactile sensors have been studied in the previous researches. However, the conventional triboelectric tactile sensors have drawbacks of limited dynamic range due to the decreasing sensitivity under increased applied pressures. Owing to this disadvantage, the triboelectric tactile sensor has not been extensively employed in smart manufacturing applications where a consistently high sensitivity within the dynamic range is preferred. In order to address this issue, a lightweight, compact, bio-friendly and highly sensitive self-powered triboelectric tactile sensor has been investigated based on the triboelectric effect. By integration of deformable foam layer, triboelectric tactile sensor is able to shift the dynamic range by 76–98 kPa without having to employ gain adjustment circuit board or modifying the properties of the sensor (geometric, materials, etc.). The proposed tactile sensor can be employed in various smart manufacturing applications in which light, self-powered, and high-performance tactile sensors are required to reduce the weight and energy consumption.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
With the growing numbers of industrialized countries with development of manufacturing technology, it is necessary to adopt sustainable, energy efficient, and environmental-friendly green technology for smart manufacturing systems [1]. Among the crucial components of smart manufacturing systems, tactile sensors act as a key role to collect big data for communication, automated controls, detect malfunction, etc. [2]. To satisfy the demands for energy efficient and high-performance tactile sensors, microfluidic [3,4,5], capacitive [6,7,8], and strain gauge [9,10,11] sensors have been studied. However, these types of sensors generally share one common drawback, namely, the need for an external power source for operation. Thus, to eliminate the external power sources, self-powered, simple, yet, high performance tactile sensors are essential for developing compact, energy efficient and innovative smart manufacturing systems.
Among many candidates, piezoelectricity and triboelectricity have arisen as a strong nominee for self-powered sensing applications. Since they are both able to recycle wasted energy (i.e. friction, vibration, etc.) [12, 13] it can be stated that these sensors are truly energy efficient. Although, piezoelectric tactile sensors have been extensively studied as self-powered sensors, they have relatively poor sensitivity due to their low charge density [14,15,16,17]. Thus, triboelectric sensor has arisen as a new portable, self-powered sensor candidate, owing to its high sensitivity [18,19,20]. When pressure is applied to a triboelectric sensor, it generates an electrical output signal via a coupling effect between the triboelectric electrification and electrostatic induction, which thus yields self-powered characteristics. Notice that these sensors can function both as a tactile detector, and as an energy harvesters when not in use.
Despite such advantages, triboelectric tactile sensors have not been extensively used in practical applications owing to their limited dynamic range that arises from their drastic reduction in sensitivity in the high-pressure range [18, 19]. This characteristic of the triboelectric sensors contradicts the concept of an ideal sensor in which high sensitivity with consistency is preferred for both accuracy and convenience [20, 21]. Therefore, in order to improve the dynamic range of triboelectric sensors, previous studies have altered the material properties, or the geometric shape of the dielectric surfaces [22,23,24]. While these approaches increased the sensor’s performance, it is not suitable for mass production due to expensive fabrication time and costs.
In order to overcome these challenges, we propose a simple, yet high-performance triboelectric sensor, i.e., a self-powered triboelectric tactile sensor with a deformable foam layer. The foam layer on top of the triboelectric tactile sensor acts as a spring that reduces the amount of deformation transmitted to the sensing polydimethylsiloxane (PDMS) layer to adjust the dynamic range of the triboelectric sensor. To closely examine this effect, we derived an analytical model, and subsequently conducted experiments using foam layers with various stiffness values and thicknesses. Our results show that, in contrast to conventional sensors, the proposed self-powered tactile sensor shifted the dynamic range by 76–98 kPa while maintaining high sensitivity, without requiring adjustment of the gain or external voltage. Our approach can be easily applied to a wide range of smart manufacturing applications for the following reasons: (1) the dynamic range of the tactile sensor can be easily adjusted with respect to the operating environment, (2) alteration of the geometrical or material properties of the sensory layer (PDMS layer in our case) or fabrication of an additional layer is not necessary to improve the performance of the tactile sensors, (3) extra wiring, and the weight of the external voltage source (battery) can be minimized owing to self-powering characteristics of the triboelectric tactile sensor, and 4) they are composed of bio-friendly materials such as PU, EVA, and PDMS which are commonly used in medical fields [25, 26].
2 Research Approach
2.1 Characterization of the Triboelectric Tactile Sensor
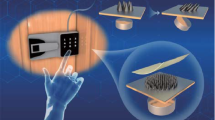
The self-powered triboelectric tactile sensor with a deformable foam layer consists of a PDMS film with a pyramidal structure on the bottom surface and a foam layer on the top surface (Fig. 1a). As shown in Fig. 1a, the pyramidal structure was replicated through a counter-shaped mold fabrication method using a computerized numerical control (CNC) milling machine. Owing to the CNC milling constraints, the tip of the pyramidal microstructure on the PDMS surface was removed. Although the pyramidal microstructure requires substantial time and effort to produce during the mold fabrication procedure, it is previously reported as suitable shape for pressure sensing applications due to its gradual change of contact area with changing pressure [22]. The pyramidally structured PDMS was placed on a copper electrode to induce an electrical potential difference (EPD) between the two surfaces. In addition, the deformable foam layers used to adjust the dynamic range of the tactile sensor were polyurethane (PU), ethylene vinyl acetate (EVA), and polyvinyl chloride (PVC). PVC possesses the highest stiffness, whereas PU provides the lowest stiffness among the three different foam layers.

Self-powered triboelectric nanogenerator tactile sensor with an integrated foam layer. a A schematic illustration of the self-powered triboelectric tactile sensor and magnified picture of the PDMS pyramid. b The operating mechanism of the self-powered triboelectric tactile sensor
The operating mechanism of self-powered triboelectric tactile sensors can be described as a single-electrode mode of a triboelectric nanogenerator (TENG) [13]. As shown in Fig. 1b, the PDMS surface with pyramidal structure, is negatively charged because of its tendency to gain electrons as it establishes contact with the underlying copper electrode. When an external pressure is applied to the sensor, the pyramidal structure is deformed, and the area of contact between the PDMS and the copper electrode increases. This increased contact area results in an EPD between the PDMS and the electrode. Because of the EPD, electrons flow to the ground from the electrode that created the current pulse. Once the two surfaces attain full contact, they reach electrical equilibrium. When the external pressure is removed, an EPD is again established between the PDMS and the electrode’s surface. The electrons then flow back to the electrode from the ground, thus creating an alternating current during the generation cycle.
2.2 Integration of a Deformable Foam Layer
Figure 2a shows a schematic of the sensor’s mechanism with the deformable foam layer. Under the applied pressure, the PDMS layer exhibits an almost linear increase in sensory output until saturation. After saturation, only low sensory outputs are produced (Fig. 2a, Case 1). When the foam layer with a low stiffness (PU or EVA) is integrated on top of the PDMS layer, most of the pressure applied to the sensor deforms the foam layer, while causing only a marginal deformation of the PDMS layer. Once the foam layer is saturated, the stiffness of the foam layer significantly increases, thereby causing the PDMS layer to deform in compensation (Fig. 2a, Case 2i). The foam layer with the higher stiffness (PVC) shows a contrasting behavior. In this case, the PDMS layer will saturate first, followed by the foam layer saturation (Fig. 2a, Case 2ii). The resulting sensory output yields a behavior similar to Fig. 2a, Case 1.

a Effects of the deformable foam layer on attaining an adjustable dynamic range, b change in PDMS deformation with and without a foam layer, and c sensory output showing a change in the dynamic range
We have mathematically analyzed the deformation characteristics of the sensor using Hooke’s law. The force (Fa) applied to the top of the sensor with a sensor area of Asensor can be converted into applied pressure (or stress), Pa, by (Eq. 1).
For elastic materials, the applied force can be represented by Hooke’s law with the stiffness of the sensor (k) and deformation in the direction of the applied pressure (dL):
Elastic strain (εa) is a function of the deformation (dL) and initial length (L0) of the sensor, which is the thickness in our case:
Based on the relationship between Eqs. 1, 2, and 3, Eq. 4 can be derived.
By using the stress-and-strain relationship, this equation can be expressed, in the form of Eq. 5, as a function of elastic modulus (E) and strain in the direction of the applied pressure (εa):
Finally, by combining Eqs. 3, 4, and 5, the stiffness of the sensor can be expressed as a function of the elastic modulus as follows:
Since the sensor consists of two, in-series elastic layers, the corresponding stiffness values (kPDMS and kfoam) can be represented as a function of each material’s elastic modulus (EPDMS and Efoam) and their thickness in the undeformed state (LPDMS0 and Lfoam0). The following equations represent the stiffness of each layer:
Due to the nonlinear stress-and-strain relationships of the elastic materials (PDMS and foam) EPDMS and Efoam are not constant [27,28,29,30]. Thus, stiffness of each layer (kPDMS and kfoam) are dependent on the elastic modulus, whereas, Asensor and thickness (LPDMS0 and Lfoam0) are both fixed design variables.
Since the magnitude of the applied force is equivalent in the two, in-series layers, Eq. 9 can be derived, wherein the negative sign represents compression. If the foam stiffness, kfoam, is selected to be lower than that of the PDMS, the foam’s deformation will precede that of the PDMS until kfoam overcomes kPDMS. At this point of interchange, the foam layer will exhibit a rigid behavior, which will then terminate the foam layer’s deformation (dLfoam) and trigger the PDMS deformation (dLPDMS) (Eq. 10).
Based on these equations, a shift in the dynamic range is expected with the appropriate integration of the foam layer.
In order to validate the proposed mechanism, we conducted series of experiments to analyze the change in deformation (Fig. 2b). For the sensor with only the PDMS layer, the pyramidal structures exhibited a large deformation under the applied pressure of 156 kPa, followed by a marginal deformation in the pressure range between 156 and 244 kPa. In the case of the sensor with the EVA layer, which has a lower stiffness than the PDMS layer, the pyramidal structures yielded a marginal deformation below the EVA saturation pressure of 111 kPa. However, the pyramidal structures yielded large deformations within the pressure range between 111 and 244 kPa and produced a high sensitivity sensor output (Fig. 2c).
This behavior supports the claim of an adjustable dynamic range of the triboelectric tactile sensor shown in Fig. 2a, because the deformation first occurred in the foam layer in instances where kfoam was less than kPDMS, as a function of the applied pressure. In conclusion, the high-sensitivity, pressure-sensing region of the PDMS layer (13–156 kPa) shifted by 98 kPa (111–244 kPa) due to the presence of the integrated EVA layer, as shown in Fig. 2c.
3 Results and Discussion
3.1 Experimental Setup
The instruments used to measure the open-circuit voltage (VOC) outputs of the self-powered triboelectric tactile sensor are shown in Fig. 3a. Throughout the experiment, the 1.5 × 1.5 cm2 triboelectric tactile sensor was depressed at 600 mm/min using a force gauge (Enpaix EFG-500) connected to a force gauge stand (Shimpo FGS-50E-H). An electrometer (Keithley 6514) was used to acquire the VOC data. Figure 3b illustrates the data acquisition setup.

a Experimental setup using a force gauge and a stand (left) and a top view of the triboelectric tactile sensor with an area of 1.5 x 1.5 cm2 (right). b Data acquisition using an electrometer and a force gauge
3.2 Sensor Output of the Self-Powered Tactile Sensor
In this section, we described the series of experiments conducted under various conditions to further analyze the effect of the deformable foam layers. Figure 4a–d show the VOC outputs from the self-powered triboelectric sensor without a deformable foam layer, and with PU, EVA, and PVC layers, respectively. The red, green, blue, and purple lines in each plot indicate the respective VOC outputs of the triboelectric tactile sensor with 2, 4, 6, and 8 mm thick foam layers. The mean stiffness of the PDMS, PU, EVA, and PVC layers used in this work were approximately 560.5, 53.9, 117.2, and 3146.4 N/mm, respectively, which were derived from their compressive modulus values [27,28,29,30]. The outputs were measured at intervals of 22 kPa in the pressure range of 13–244 kPa. The resulting output from an external pressure of 400 kPa was measured to confirm that the change in the VOC was mainly within the pressure range of 13–244 kPa.

VOC outputs and curve fitting analyses of the self-powered triboelectric tactile sensor with a PDMS layer only, b PU and PDMS, c EVA and PDMS, and d PVC and PDMS
In order to validate the reliability of the adjustable dynamic range tactile sensors, curve fitting analyses were performed using MATLAB (Mathworks Inc.). We aimed to achieve minimum R-square value of 0.90 (90% reliability) using linear fit within the sensing range (Tables 1, 2, 3, 4). Figure 4 shows the resulting graphs for the curve fitting analyses. Within the figure, region <1> denotes foam deformation, region <2> denotes PDMS deformation after the foam saturates (dynamic range with high sensitivity), and region <3> denotes PDMS/whole saturation.
Based on these analyses, the tactile sensor with the PDMS layer yielded a dynamic range of 13–156 kPa with high sensitivity < 2>. When the applied pressure exceeded the dynamic range, the sensitivity decreased in the pressure range of 156–244 kPa, and converged at pressure range of 244–400 kPa <3 >. Thus, when an applied pressure exceeded 156 kPa, the tactile sensor with the PDMS layer was saturated (Fig. 4a, Table 1).
Unlike the tactile sensor with only the PDMS layer, the integration of the PU layer shifted the dynamic range by 76 kPa. This sensor yielded low sensitivity in the pressure range of 13–89 kPa <1>. Subsequently, the sensitivities of the sensors increased by 3- to 6-fold at pressures within the range of 89–222 kPa <2>. Beyond 222 kPa, the sensitivity drastically decreased < 3>. Although the sensitivity of the sensor increased with increasing foam thickness, the thickness did not have a significant impact on the dynamic range because the PU layer yielded a relatively lower stiffness value compared to the PDMS (25.9–103.5 N/mm). Based on this observation, the tactile sensor with the PU layers yielded a dynamic range shifted from 13–156 to 89–222 kPa (Fig. 4b, Table 2).
Similar to the tactile sensor with the PU layers, the integration of the EVA layer caused a further shift in the dynamic range of 98 kPa. Within the pressure range of 13–111 kPa, a low sensitivity was observed < 1>, followed by a subsequent increase at the higher pressure range of 111–244 kPa <2>. At pressures above 244 kPa, the sensitivity exhibited a drastic decrease < 3>. However, the EVA layer exhibited a marginal deformation with the PDMS layer, yielding a slightly curved line, similar to the one shown in Fig. 4c, near 244 kPa. Thus, even after the saturation, the stiffness of the EVA layer is assumed to yield lower values than the kPDMS. Just like the sensor with the PU layer, the thickness of the foam did not have a significant impact on the dynamic range. However, the sensitivity of the sensor decreased with increasing EVA thickness. The dynamic range of the tactile sensor shifted from 13–156 to 111–244 kPa (Fig. 4c, Table 3).
In contrast to the PU and EVA layers, the integrated PVC layer exhibited behaviors highly comparable to tactile sensor with only the PDMS layer. Because the stiffness of the PVC layer far exceeds that of the PDMS layer for all thicknesses (1510.3–6041.2 N/mm), the sensor is expected to exhibit a behavior similar to Case 2ii, as shown in Fig. 2a. In the pressure range between 13 and 156 kPa, the PVC layer yielded high sensitivity values < 3>. The sensitivity subsequently reduced in the pressure range of 156–244 kPa and further decreased within the pressure range of 244–400 kPa <3>. Therefore, the PVC layer cannot reduce the amount of deformation of the PDMS layer and exhibit no adjustment to the dynamic range (Fig. 4d, Table 4).
Besides the differences in the dynamic ranges of the four sensors, there are some uncertainties as indicated by the error bars. It is interesting to note that the range of the error bars are highly dependent on the stiffness of the foam layers. For instance, the PVC yielded small error bars, while the PU and EVA yielded comparably large error bars. This is owing to the difference in the structural relaxations observed in the different materials (press-and-release recovery phase). Our study shows that by selecting an appropriate kfoam, we can achieve an adjustable dynamic range when compared to the tactile sensor with the PDMS only. We plan to conduct further investigation to find the optimal kfoam to achieve the desired dynamic range while minimizing the deviations to enhance reliability of tactile sensors.
4 Conclusion and Future Work
Based on the triboelectric effect, we have proposed a new, self-powered, deformable foam-layered tactile sensor with an adjustable dynamic range. Since various dynamic ranges can be achieved by replacing the deformable foam material in the sensor, this new tactile sensor can be easily fabricated without having to modify the properties of the PDMS sensing layer (i.e., roughness, pitch, material, etc.). Not only is this sensor self-powered, it is also lightweight, compact, bio-friendly and yields high-sensitivity readings, thereby indicating that no external voltage or gain adjustment circuit board is required for operation. Notice that this sensor can be both used as an energy harvester when not in use as a sensor. Owing to these advantages, this sensor is highly applicable to a wide range of smart manufacturing applications, in which simple, light, self-powered, and high-performance tactile sensors are required to reduce the extra weight and energy consumption to operate mechanical systems.
We are currently working towards the development of a smart bio-friendly tiles by using the self-powered triboelectric tactile sensor arrays to detect population movement within the urban area. Since the proposed tactile sensor can also function as an energy harvester, we could store extra energy for reservoir in the densely populated part of the city. In addition, we will conduct additional experiments regarding the triboelectric effect, with respect to foam thickness and materials, in order to further improve our new triboelectric tactile sensor for sensitivity adjustments.
Abbreviations
- VOC :
-
Open-circuit voltage (V)
- Pa :
-
Applied pressure/stress (Pa)
- Fa :
-
Applied force (N)
- Asensor :
-
Sensor area (m2)
- k:
-
Sensor stiffness (N/m)
- dL:
-
Deformation in the direction of the applied pressure (m)
- L0 :
-
Initial thickness of the sensor (m)
- εa :
-
Elastic strain
- E:
-
Elastic modulus (Pa)
- kPDMS :
-
PDMS layer stiffness (N/m)
- LPDMS0 :
-
Initial thickness of the PDMS layer (m)
- dLPDMS :
-
Deformation of the PDMS layer (m)
- kFoam :
-
Foam layer stiffness (N/m)
- LFoam0 :
-
Initial thickness of the foam layer (m)
- dLFoam :
-
Deformation of the foam layer (m)
- EPDMS :
-
Elastic modulus of the PDMS layer (Pa)
- EFoam :
-
Elastic modulus of the foam layer (Pa)
References
Ahn, S.-H. (2014). An evaluation of green manufacturing technologies based on research databases. International Journal of Precision Engineering and Manufacturing-Green Technology, 1(1), 5–9.
Kang, H. S., Lee, J. Y., Choi, S., Kim, H., Park, J. H., Son, J. Y., et al. (2016). Smart manufacturing: past research, present findings, and future directions. International Journal of Precision Engineering and Manufacturing-Green Technology, 3(1), 111–128.
Park, Y.-L., Chen, B.-R., & Wood, R. J. (2012). Design and fabrication of soft artificial skin using embedded microchannels and liquid conductors. IEEE Sensors Journal, 12(8), 2711–2718.
Nie, B., Li, R., Brandt, J. D., & Pan, T. (2014). Microfluidic tactile sensors for three-dimensional contact force measurements. Lab on a Chip, 14(22), 4344–4353.
Hammond, F. L., Mengüc, Y., & Wood, R. J. (2014). Toward modular soft sensor-embedded glove for human hand motion and tactile pressure measurement. In IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), Chicago, IL, USA (pp. 4000–4007). IEEE
Ulmen, J., & Cutkosky, M. (2010). A robust, low-cost and low-noise artificial skin for human-friendly robots. In IEEE International Conference on Robotics and Automation, Anchorage, Alaska, USA (pp. 4836–4841).
Phan, S., Quek, Z. F., Shah, P., Shin, D., Ahmed, Z., Khatib, O., & Cutkosky M. (2011). Capacitive skin sensors for robot impact monitoring. In IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA (pp. 2992–2997).
Šekoranja, B., Bašić, D., Švaco, M., Šuligoj, F., & Jerbić, B. (2014). Human-robot interaction based on use of capacitive sensors. Procedia Engineering, 69, 464–468.
Kim, K., Lee, K. R., Kim, W. H., Park, K.-B., Kim, T.-H., Kim, J.-S., et al. (2009). Polymer-based flexible tactile sensor up to 32 x 32 arrays integrated with interconnection terminals. Sensors and Actuators A, 156(2), 284–291.
Pang, C., Lee, G.-Y., Kim, T.-I., Kim, S. M., Kim, H. N., Ahn, S.-H., et al. (2012). A flexible and highly sensitive strain-gauge sensor using reversible interlocking of nanofibers. Nature Materials, 11, 795–801.
Ma, C.-W., Hsu, L.-S., Kuo, J.-C., & Yang, Y.-J. (2015). A flexible tactile and shear sensing array fabricated using a novel buckypaper patterning technique. Sensors and Actuators A, 231, 21–27.
Park, J.-H., Lim, T.-W., Kim, S.-D., & Park, S.-H. (2016). Design and experimental verification of flexible plate-type piezoelectric vibrator for energy harvesting system. International Journal of Precision Engineering and Manufacturing-Green Technology, 3(3), 253–259.
Wang, Z. L. (2014). Triboelectric nanogenerators as new energy technology and self-powered sensors—principles, problems, and perspectives. Faraday Discussions, 176, 447–458.
Büscher, G. H., Kõiva, R., Schürmann, C., Haschke, R., & Ritter, H. J. (2015). Flexible and stretchable fabric-based tactile sensor. Robotics and Autonomous Systems, 63(3), 244–252.
Siddiqui, S., Kim, D.-I., Roh, E., Duy, L. T., Trung, T. Q., Nguyen, M. T., et al. (2016). A durable and stable piezoelectric nanogenerator with nanocomposite and nanofibers embedded in an elastomer under high loading for a self-powered sensor system. Nano Energy, 30, 434–442.
Spanu, A., Pinna, L., Viola, F., Seminara, L., Valle, M., Bonfiglio, A., et al. (2016). A high-sensitivity tactile sensor based on piezoelectric polymer PVDF coupled to an ultra-low voltage organic transistor. Organic Electronics, Vo., 36, 57–60.
Anton, S., Farinholt, K., & Erturk, A. (2014). Piezoelectret foam-based vibration energy harvesting. Journal of Intelligent Material Systems and Structures, 25(14), 1681–1692.
Wang, S., Lin, L., & Wang, Z. L. (2015). Triboelectric nanogenerators as self-powered active sensors. Nano Energy, 11, 436–462.
Lin, L., Xie, Y., Wang, S., Wu, W., Niu, S., Wen, X., et al. (2013). triboelectric active sensor array for self-powered static and dynamic pressure detection and tactile imaging. ACS Nano, 7(9), 8266–8274.
Badi, N., Bensaoula, A., & Nair, M. (2013). Dynamic range and sensitivity of field emission pressure sensors with non-silicon membranes. Applied Surface Science, 285, 907–911.
Zhu, Y., Qin, M., Huang, J., Yi, Z., & Huang, Q.-A. (2016). Sensitivity improvement of a 2D MEMS thermal wind sensor for low-power applications. IEEE Sensors J., 16(11), 4300–4308.
Seol, M.-L., Lee, S.-H., Han, J.-W., Kim, D., Cho, G.-H., & Choi, Y.-K. (2015). Impact of contact pressure on output voltage of triboelectric nanogenerator based on deformation of interfacial structures. Nano Energy, 17, 63–71.
Luo, J., Fan, F. R., Zhou, T., Tang, W., Xue, F., & Wang, Z. L. (2015). Ultrasensitive self-powered pressure sensing system. Extreme Mechanics Letters, 2, 28–36.
Xia, X., Chen, J., Guo, H., Liu, G., Wei, D., Xi, Y., et al. (2017). Embedding variable micro-capacitors in polydimethylsiloxane for enhancing output power of triboelectric nanogenerator. Nano Research, 10(1), 320–330.
Hande, N. (2006). Long-term safety and efficacy of polyurethane foam-covered breast implants. Aesthetic Surgery Journal, 26(3), 265–274.
Genina, N., Holländer, J., Jukarainen, H., Mäkilä, E., Salonen, J., & Sandler, N. (2016). Ethylene vinyl acetate (EVA) as a new drug carrier for 3D printed medical drug delivery devices. European Journal of Pharmaceutical Sciences, 90, 53–63.
Wang, Z. (2011). Polydimethylsiloxane mechanical properties measured by macroscopic compression and nanoindentation technique. Graduate Theses and Dissertations.
Witkiewicz, W., & Zieliński, A. (2006). Properties of the polyurethane (PU) light foams. Advances in Materials Science, 6(2), 35–51.
Verdejo, R., & Mills, N. J. (2004). Heel-shoe interactions and the durability of EVA foam running-shoe midsoles. Journal of Biomechanics, 37(9), 1379–1386.
Oroszlány, Á., Nagy, P., & Kovács, J. G. (2015). Compressive properties of commercially available PVC foams intended for use as mechanical models for human cancellous bone. Acta Polytechnica Hungarica, 12(2), 89–101.
Acknowledgement
Dongun Lee and Jihoon Chung contributed equally to this work. This research was supported by the Chung-Ang University Research Scholarship Grants in 2014. This research was supported by Nano Material Technology Development Program through the National Research Foundation of Korea (NRF-2016M3A7B4910532).
Author information
Authors and Affiliations
Corresponding authors
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Lee, D., Chung, J., Yong, H. et al. A Deformable Foam-Layered Triboelectric Tactile Sensor with Adjustable Dynamic Range. Int. J. of Precis. Eng. and Manuf.-Green Tech. 6, 43–51 (2019). https://doi.org/10.1007/s40684-019-00024-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40684-019-00024-5