
Abstract
Alexandrov’s soap bubble theorem asserts that spheres are the only connected closed embedded hypersurfaces in the Euclidean space with constant mean curvature. The theorem can be extended to space forms and it holds for more general functions of the principal curvatures. In this short review, we discuss quantitative stability results regarding Alexandrov’s theorem which have been obtained by the author in recent years. In particular, we consider hypersurfaces having mean curvature close to a constant and we quantitatively describe the proximity to a single sphere or to a collection of tangent spheres in terms of the oscillation of the mean curvature. Moreover, we also consider the problem in a non local setting, and we show that the non local effect gives a stronger rigidity to the problem and prevents the appearance of bubbling.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In a series a papers during the sixties [2,3,4], Alexandrov studied global properties of surfaces with a flavour which is a mix between differential geometry and partial differential equations. One of the most influencing results that he proved is the so called Alexandrov Soap Bubble Theorem, which asserts the following:
Theorem 1.1
(Alexandrov’s Theorem) Let \(\Omega \subset \mathbb {R}^{n+1}\), \(n \ge 1\), be a bounded connected domain with boundary \(S=\partial \Omega \) of class \(C^2\). Then the mean curvature H of S is constant if and only if S is a sphere.
This result was probably expected by the mathematical community, and some attempts and partial results were previously proved [27, 29]. Alexandrov’s theorem is related to a well-known conjecture of H. Hopf [27]:
Theorem 1.2
(Hopf Conjecture) Let S be an immersion of an oriented, closed hypersurface with constant mean curvature \(H \ne 0\) in \(\mathbb {R}^{n+1}\). Must S be the standard embedded n-sphere?
Since \(S=\partial \Omega \) is the boundary of a bounded open set, then the hypersurface S considered in Alexandrov’s theorem is embedded and hence Alexandrov proved that Hopf’s Conjecture is true under the assumption of embedness. This assumption is optimal as it is was proved by Wente in [44], where he gave a counterexample of an immersed hypersurface with constant mean curvature which is not a sphere in \(\mathbb {R}^3\), nowadays called the Wente’s tori (see also [28] for a counterexample in \(\mathbb {R}^4\)).
Removing the embedness assumption is possible by assuming other assumptions on the hypersurface. For instance, it is a result of Hopf [27] that an immersed and simply connected hypersurface in \(\mathbb {R}^3\) with constant mean curvature is a sphere. Other results have been obtained by Barbosa and Do Carmo [6] under the assumption that the hypersurface is stable.
In this paper we consider an embedded hypersurface \(S=\partial \Omega \) of \(\mathbb {R}^{n+1}\) having the mean curvature close to a constant and we are interested in quantifying the proximity of S to some special configuration.
At a first glance, one could think that it is reasonable to have that if \(H_S\) is close to a constant, then S is close to a sphere. This is not true, since bubbling may appear: it is possible to construct counterexamples showing that an almost constant mean curvature hypersurface is close to an array of tangent spheres in any \(C^k\) norm (see for instance [9, 10] and [30, 31]).
More precisely, the examples available in literature show that S is a small deformation of almost tangent spheres which are connected by very small necks. In these necks the almost umbilicality of the surfaces is completely lost, since the mean curvature turns to be close to a constant even if the absolute value of the principal curvatures becomes arbitrarily large. This phenomenon suggests that in order to have the proximity to a single sphere, one has to introduce some condition that prevents the blow-up of the principal curvatures.
Quantitatively describing the bubbling and/or the proximity to a single sphere is the main goal of this note, in which we review some recent results obtained by the author and his collaborators as well as other related results.
2 Quantifying the bubbling
In this section we give a quantitative description of bubbling for almost constant mean curvatures. These results were obtained by the author and Maggi in [16].
Let \(\Omega \subset \mathbb {R}^{n+1}\) be a bounded connected open set, with boundary \(\partial \Omega \) of class \(C^2\). We denote by \(H= k_1 + \ldots + k_n\) the mean curvature of \(\partial \Omega \) (not normalized by n), and by \(P(\Omega )\) and \(|\Omega |\) the perimeter and the \((n+1)\)-Lebesgue measure of \(\Omega \), respectively.
We begin with some simple consideration. We first notice that if \(\partial \Omega \) has constant mean curvature then \(H=H_0\), where
Indeed, (2.1) follows from the tangential divergence theorem and the divergence theorem under the assumption that H is constant:
We use this observation to introduce a scale invariant deficit, which will measure the distance of H from the constant \(H_0\):
This is a scale invariant quantity, in the sense that \(\delta (\lambda \Omega )=\delta (\Omega )\) for any \(\lambda >0\) and \(\delta (\Omega )=0\) if and only if H is constant (i.e. \(H=H_0\)). Clearly, by Alexandrov Theorem, \(\delta (\Omega ) = 0\) if and only if \(\Omega \) is a ball.
Since the deficit \(\delta (\Omega )\) is scale invariant, we can assume that \(H_0=n\) (hence in case \(\delta (\Omega )=0\) then \(\Omega =B_1\)). In the following theorem, we just assume an upper bound on the perimeter, and we quantitatively describe what happens when \(\delta (\Omega )\) is close to zero. Since we only assume a bound on the perimeter, we have to deal with possible bubbling and the bound on the perimeter is needed in order to bound the number of possible bubbles. More precisely, we introduce a scale-invariant quantity
and notice that, thanks to the isoperimetric inequality, one always have \({\mathcal {Q}}(\Omega ) \ge 1\) and that
\(\forall L \in \mathbb {N}\), \(L\ge 1\). As we will show, the functional \({\mathcal {Q}}\) counts how many disjoint balls of radius \(n/H_0\) will approximate \(\Omega \). Indeed we have the following theorem which was proved in
Theorem 2.1
Given \(n,L\in {\mathbb {N}}\) with \(n\ge 2\) and \(L\ge 1\), and \(a\in (0,1]\), there exists a positive constant \(c(n,L,a)>0\) with the following property. If \(\Omega \) is a bounded connected open set with \(C^2\)-boundary in \({\mathbb {R}}^{n+1}\) such that \(H>0\) and
then there exists a finite family \(\{B_{z_j,1}\}_{j\in J}\) of mutually disjoint balls with \(\#\,J\le L\) such that if we set
then
Moreover, there exists an open subset \(\Sigma \) of \(\partial G\) and a function \(\psi :\Sigma \rightarrow {\mathbb {R}}\) with the following properties. The set \(\partial G\setminus \Sigma \) consists of at most \(C(n)\,L\)-many spherical caps whose diameters are bounded by \(C(n)\,\delta (\Omega )^{\alpha /4(n+1)}\). The function \(\psi \) is such that \((\mathrm{Id}+\psi \,\nu _G)(\Sigma )\subset \partial \Omega \) and
where \((\mathrm{Id}+\psi \,\nu _G)(x)=x+\psi (x)\,\nu _G(x)\) and \(\nu _G\) is the outer unit normal to G.
From a qualitative point of view, Theorem 2.1 has the consequence that examples available in literature on almost constant mean curvature are actually the only possible ones which are not close to a single sphere, and this qualitative information is optimal.
The quantitative estimates in Theorem 2.1 are clearly the main result of the theorem. Indeed, not only they describe quantitatively the appearing of bubbling (although arguably in a non-sharp way), but they can also be used to describe capillarity droplets, as we will describe later. Moreover, these estimates have a simple and interesting consequence, which is described in the following proposition (see [16][Proposition 1.1]).
Proposition 2.2
Under the same assumptions of Theorem 2.1:
-
(i)
if \(\#\,J\ge 2\), then for each \(j\in J\) there exists \(\ell \in J\), \(\ell \ne j\), such that
$$\begin{aligned} \frac{\mathrm {dist}(\partial B_{z_j,1},\partial B_{z_\ell ,1})}{\mathrm {diam}(\Omega )}\le C(n)\,\delta (\Omega )^{\alpha /4(n+1)}\,, \end{aligned}$$(2.10)that is to say, each ball in \(\{B_{z_j,1}\}_{j\in J}\) is close to be tangent to another ball from the family;
-
(ii)
if there exists \(\kappa \in (0,1)\) such that
$$\begin{aligned} |B_{x,r}\setminus \Omega |\ge \kappa \,|B|\,r^{n+1}\,,\qquad \forall x\in \partial \Omega \,,r<\kappa \,, \end{aligned}$$(2.11)and \(\delta (\Omega )\le c(n,L,\kappa )\), then \(\#\,J=1\), that is, \(\Omega \) is close to a single ball.
Item (ii) in Proposition 2.2 gives a smallness criterion for proximity to a single ball which is very weak: indeed only an exterior uniform volume estimate is needed in order to avoid the appearing of bubbling. As we will show later, this criterion is also important because it can also be applied to describe the shape of local minimizers in capillarity problems.
Now we describe the strategy of the proof of Theorem 2.1. To clarify the exposition, we start by giving the proof of Alexandrov Theorem given by A. Ros in [41], which is the starting point for our qualitative analysis.
The proof in [41] is based on the Heintze-Karcher inequality, which asserts that if \(H>0\) then
This inequality can be proved by introducing an auxiliary problem, the torsion problem for \(\Omega \), i.e. considering
and by showing that, by using Reilly’s inequality (see [40]), the equality in (2.12) is attained if and only if
and
The proof of Theorem 2.1 can be summarized as follows.
Step 1 - Uniform bounds for the torsion potential. We use classical symmetrization results and a P-function approach to prove that
Step 2 - Quantitative analysis of Ros’ proof. By looking at Ros’ proof by a quantitative viewpoint and making use of Step 1, we obtain the following two inequalities:
where the second estimate holds if \(\delta (\Omega )\le 1/2\), and where \(\nabla f=|\nabla f|\,\nu _\Omega \ne 0\) on \(\partial \Omega \).
Step 3 - Localize the estimates in Step 2. We localize the estimates (2.16) and (2.17) by considering convolutions \(f_\varepsilon \) of the torsion potential f. This implies that, on the smaller set \(\Omega _\varepsilon = \{x \in \Omega :\ \mathrm {dist}(x,\partial \Omega ) > \varepsilon \}\), we have the following pointwise bounds:
where \(\eta (\Omega )\) is called the Heintze-Karcher deficit and it is defined by
Step 4 - Prove the existence of approximating balls. A crucial step is to prove that there exist \(\{B_{x_j,s_j}\}_{j\in J}\subset \{B_{x_i,r_1^i}\}_{i\in I}\) such that
and, if \(G^*=\bigcup _{j\in J}B_{x_j,s_j}\) (so that \(G^*\subset \Omega \) by construction), then
This step is proved by exploiting the estimates in Step 3 and obtaining information on the set \(A_\varepsilon = \{f_|ep <- 3 \rho \}\), where \(\rho = C_0(n) \varepsilon \). In particular, we can show that for \(\varepsilon \) small enough we have
and that each connected component of \(A^\varepsilon \) is convex as well as other quantitative information on the set \(A^\varepsilon \). Then, by carefully exploiting Pohozaev’s identity in a quantitative way, we obtain the estimates (2.22)–(2.25).
Step 5 - Quantitative proximity of \(G^*\) to \(\Omega \) and quantitative estimates for G. By refining the estimates on \(\nabla f_\varepsilon \), in particular by proving that
we can show that
Finally, starting from \(G^*\), we are able to construct the set G as in the statement of the theorem which has the desired properties.
Step 6 - Almost all of \(\partial \Omega \) is a normal graph on \(\partial G\). In order to prove this step, the main idea is to use the area excess regularity criterion of Allard. In particular, at points \(x\in \partial \Omega \) which are sufficiently close to \(\partial G\), we need to quantify the size of \({\mathcal {H}}^n(\partial \Omega \cap B_{x,r})\), where r is small and proportional to a suitable power of \(\delta (\Omega )\). This is done by carefully partitioning \({\mathbb {R}}^{n+1}\) into suitable polyhedral regions associated to the balls \(B_{z_j,1}\), and by then performing inside each of these regions a calibration type argument with respect to the corresponding ball \(B_{z_j,1}\) (see [16][Proof of Theorem 1.1 - Step six]).
Thanks to this argument, and many others, we are able to parameterize a large portion of \(\partial \Omega \) over a large portion of \(\partial G\) and obtain the estimates (2.7), (2.8) and (2.9), which completes the proof of Theorem 2.1.
3 Proximity to a single ball
As we have seen in Sect. 2, an almost constant mean curvature hypersurface is not necessarily close to a sphere and instead bubbling may appear. In this section we describe some quantitative results where the hypersurface is close to a sphere. In order to do that, one has to introduce some further assumption on the hypersurface which prevents bubbling, as we are going to describe below.
Quantitative results for almost constant mean curvature hypersurface have been largely studied under the assumption that the domain is convex: if \(\Omega \) is an ovaloid, the problem was studied by Koutroufiotis [33], Lang [35] and Moore [39]. Other stability results can be found in Schneider [42] and Arnold [5]. These results were improved by Kohlmann in [32] where he proved an explicit Hölder type stability in (3.3) below. It is clear from Theorem 2.1 that the assumption that \(\Omega \) is convex forces the domain to be close to a ball as the mean curvature goes to a constant. Moreover, from the quantitative point of view, the estimates obtained in the papers cited above are not sharp.
These estimates where largely improved by the author and Vezzoni in [22] under the weaker assumption that the hypersurface satisfies a touching ball condition of fixed radius, i.e. by assuming that there exists \(\rho >0\) such that for any \(x \in \partial \Omega \) there exists a ball of radius \(\rho \) touching \(\partial \Omega \) at x from inside \(\Omega \) and a ball of radius \(\rho \) touching \(\partial \Omega \) at x from outside \(\Omega \). The main result in [22] is a quantitative stability estimate for Alexandrov’s theorem in terms of the oscillation of the mean curvature
Theorem 3.1
([22]) Let \(S= \partial \Omega \) be an n-dimensional, \(C^2\)-regular, connected, closed hypersurface embedded in \(\mathbb {R}^{n+1}\), with \(\Omega \subset \mathbb {R}^{n+1}\) a bounded domain satisfying a touching ball condition of radius \(\rho \). There exist constants \(\varepsilon , C>0\) such that if
then there are two concentric balls \(B_{r}\) and \(B_{R}\) such that
and
The constants \(\varepsilon \) and C only depend on n and an upper bound on \(\rho ^{-1}\) and on |S|.
Moreover, S is diffeomorphic to a sphere and there exists a \(C^1\) map
s.t.
where C depends only on n and an upper bound on \(\rho ^{-1}\) and on |S|.
In view of the above in Sect. 2, the assumption on the touching in Theorem 3.1 is the condition which prevents bubbling, since it gives a constraint on the principal curvatures (if bubbling appears then one has curvatures going to infinity in the necks connecting the tangent almost spheres).
The proof of Theorem 3.1 is based on a quantitative analysis of the original proof of Alexandrov. Alexandrov’s theorem was important not only for the result itself, but also for the technique that Alexandrov used to prove it: the method of moving planes (MMP). This method, as well as Alexandrov’s theorem, still have a great influence nowadays on the research in geometric analysis and partial differential equations (see the reviews [8] and [20]).
The proof of Theorem 3.1 is based on a quantitative analysis of the method of moving planes. This type of analysis was first done in [1] (see also [17,18,19]). As a first hint, one has to replace qualitative tools like maximum principles by quantitative ones as Harnack’s inequality. In order to properly describe a sketch of the proof, we recall how the method of moving planes given in the proof by Alexandrov works.
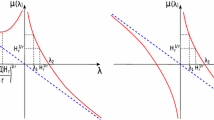
For any fixed direction \(\omega \) we consider the hyperplanes \(\pi _\lambda = \{x \cdot \omega = \lambda \}\) orthogonal to \(\omega \). Since \(\Omega \) is bounded, we have that \(\Omega \cap \pi _\lambda = \emptyset \) for \(\lambda \) large. We decrease the value of \(\lambda \) until we find a hyperplane \(\pi _{\lambda _0} \) which is tangent to \(\partial \Omega \). Since \(\Omega \) is bounded and smooth, for \(\lambda < \lambda _0\) and \(\lambda \) close to \(\lambda _0\) we have that the reflection of
is contained in \(\Omega \). We denote by \({\mathcal {R}}_\lambda (\Omega _\lambda )\) the reflection of \(\Omega _\lambda \) about \(\pi _\lambda \). By continuing decreasing \(\lambda \), we arrive at a critical position given by
where the reflection of \(\Omega _{\lambda _*}\) is tangent to \(\Omega \). This critical position may occur in two different ways:
-
(i)
\({\mathcal {R}}_{\lambda _*} (\Omega _{\lambda _*})\) is tangent to \(\Omega \) at a point \(p\in \partial \Omega \setminus \pi _{\lambda _*}\);
-
(ii)
\({\mathcal {R}}_{\lambda _*} (\Omega _{\lambda _*})\) is tangent to \(\Omega \) at a point \(q\in \partial \Omega \cap \pi _{\lambda _*}\).
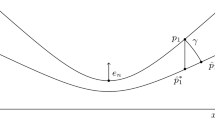
Since p and q are tangency points, the tangent spaces of \(\partial \Omega \) and \({\mathcal {R}}_{\lambda _*} (\Omega _{\lambda _*})\) at p and q coincide. Hence, In both cases, we can locally write \(\partial \Omega \) and \({\mathcal {R}}_{\lambda _*} (\Omega _{\lambda _*})\) as graphs of function on the tangent space at p or q, and we find two functions \(u^1,u^2: E \rightarrow \mathbb {R}\) which parametrize \(\partial \Omega \) and \({\mathcal {R}}_{\lambda _*} (\Omega _{\lambda _*})\), respectively. The set \(E \subset \mathbb {R}^n\) is a subset of the tangent space and it is a ball in case (i) and half a ball in case (ii).
Hence \(u^1\) and \(u^2\) satisfy the mean curvature equation
\(i=1,2\) and by construction we have that
Since H is constant and \(\nabla u^i\) are bounded in E (up to choosing a smaller set), then the difference \(u^1-u^2\) is nonnegative and it satisfies a linear elliptic equation in E
In case (i), we have that \(E=B_r\) and \(u^1(O) -u^2(O) =0\) and by the strong maximum principle we conclude that \(u^1 - u^2 = 0\) in E. In case (ii) we have that \(E=B_r^+\) (half ball) and \(u^1(O)-u^2(O) =0\), where now \(O \in \partial E\); now the conclusion follows from Hopf’s boundary point lemma and we conclude that, again, \(u^1 - u^2 = 0\) in E.
Hence, we have proved that the set of tangency points is both closed and open, and then \(\partial \Omega \cap \{x \in \Omega :\ x {\dot{\omega }} < \lambda _*\}\) and \({\mathcal {R}}_{\lambda _*} (\Omega _{\lambda _*})\) must coincide, i.e. \(\Omega \) is symmetric with respect to the direction \(\omega \).
Since the direction \(\omega \) is arbitrary then \(\Omega \) is symmetric with respect to any direction and then it is easy to show that it has a radial symmetry. Moreover, by construction of the method of moving planes we also obtain that \(\Omega \) is simply connected and the condition that H is constant forces \(\Omega \) to be a ball. This completes the proof of Alexandrov’s theorem.
Now we briefly review this proof from a quantitative point of view. When we apply the method of moving planes, we still arrive at the two possible critical positions (i) and (ii), we still find two ordered solutions \(u^1 \ge u^2\), but since H is not constant (3.5) is replaced by
where \(\Vert f\Vert _{C^0} \le \mathrm oscH\). Hence, in case (i) we can apply Harnack’s inequality and obtain that there exists C such that
and by interior elliptic regularity estimates we obtain
Here, the touching ball condition plays an important role. Indeed, thank to this condition, the size of r can be estimated in terms of \(\rho \), for instance \(r=\rho /2\) is fine. This condition gives also an upper bound on the gradients of \(u^1\) and \(u^2\), which is crucial in order to apply elliptic estimates. In this review, we only describe the quantitative estimates in case (i); case (ii) is analogous but needs some more technicality. For instance, (3.7) must be replaced by a quantitative version of Hopf’s boundary point lemma.
We notice that (3.8) not only says that the graphs of \(u^1\) and \(u^2\) are close, but also that the normals to \(\partial \Omega \) and \({\mathcal {R}}_{\lambda _*} (\Omega _{\lambda _*})\) are close in a neighborhood of the tangent point p. These two informations are crucial in order to propagate the smallness information in (3.8) all around the connected component \(\Sigma \) of the reflected cap \({\mathcal {R}}_{\lambda _*} (\Omega _{\lambda _*})\) which contains the tangency point p. This can be achieved by a chain of Harnack’s inequality performed with balls of fixed size (thanks to the touching ball condition) all around the reflected cap. This argument is true up to a small error (bounded in terms of \(\mathrm oscH\)) due to the fact that the tangent hyperplanes to \(\partial \Omega \) and to \(\Sigma \) may not coincide (they coincide only at the first step when the two hypersurfaces are tanget), and we have to take care of this difficulty in order to locally write \(\partial \Omega \) and \(\Sigma \) as graphs of function on the tangent space of a suitable point in \(\Sigma \).
We also emphasize that a Harnack’s chain of inequality may be applied up to a fixed distance from the hyperplane \(\pi _{\lambda _*}\). When we are close to \(\pi _{\lambda _*}\) we have to use quantitative Carleman’s type estimates.
After this argument, we are able to show that the domain \(\Omega \) is almost symmetric with respect to \(\pi _{\lambda _*}\). Here, the word almost means the following:
Theorem 3.2
(Theorem 4.1 in [22]) There exists a positive constant \(\varepsilon \) such that if
then for any \(p \in \Sigma \) there exists \({\hat{p}}\in {\hat{\Sigma }}\) such that
Here, the constants \(\varepsilon \) and C depend only on n, \(\rho \), |S| and do not depend on the direction \(\omega \).
Once we have the approximate symmetry in any direction, we obtain the approximate radial symmetry by using the following argument.
We apply the method of moving planes in the direction of the coordinate axes \(e_1,\ldots ,e_{n+1}\) and we find \(n+1\) critical position and critical hyperplanes \(\pi _1,\ldots ,\pi _{n+1}\). Let
The point \({\mathcal {O}}\) will serve as approximate center of symmetry. Thanks to the approximate symmetry in the directions \(e_1,\ldots ,e_{n+1}\), the reflection \({\mathcal {R}}\) about \({\mathcal {O}}\) is given by
where \({\mathcal {R}}_{\pi _{i}}\) denotes the reflection about the critical hyperplane \(\pi _i\) in the direction \(e_i\), \(i=1,\ldots , n+1\), and the approximate symmetry about \({\mathcal {O}}\) can be estimated by using Theorem 3.2 (iterated \((n+1)\)-times).
By using again the method of moving planes, we can show that every critical hyperplane in a generic direction \(\omega \) is close (in a quantitative way) to \({\mathcal {O}}\), and then we can prove the quantitative estimate on \(r_e-r_1\) in Theorem 3.1.
The rest of the proof of Theorem 3.1 (in particular the \(C^1\) estimate on \(\Psi \)) can proved in two steps: we first find a Lipschitz bound on \(\Psi \) by using the method of moving planes, and then we can refine the estimate by using elliptic regularity. This completes the proof of Theorem 3.1.
We mention that there are other quantitative results estimating the proximity of almost constant mean curvature hypersurfaces to a single sphere.
In [34] Krummel and Maggi prove a sharp stability estimate for almost constant mean curvature hypersurfaces by proving a quantitative version of Almgren’s isoperimetric principle. In this context, Almgren’s isoperimetric principle asserts the following: if \(\Omega \) is a bounded open set with smooth boundary in \(\mathbb {R}^{n+1}\), then \(H_{\partial \Omega } \le 1\) implies that \(P(\Omega ) \ge P(B_1)\), where the equality case is attained if and only if \(\Omega \) is a ball of radius one. Thanks to a sharp quantitative version of this principle, the authors are able to prove sharp stability estimates of proximity to a single ball just by assuming that the perimeter of \(\Omega \) is strictly less than two times the perimeter of a ball. Hence, in this case, \(P(\Omega ) < 2 P(B_1)\) is the assumption that prevents bubbling.
Another approach to quantitative estimates of proximity to a single ball, which is based on integral identities, can be found in a series of papers by Magnanini and Poggesi [36,37,38]. Here, the assumptions that prevents bubbling are bounds on the interior and exterior touching ball condition and on the diameter of \(\Omega \). Moreover, the stability result is given in terms of a different deficit.
4 Quantitative results in other settings
4.1 Bubbling for crystals
There are many situations of physical and geometric interest where the Euclidean norm is replaced by another norm in \(\mathbb {R}^n\) (see for instance [43]). In particular, one can define the anisotropic perimeter by considering an anisotropic surface energy of the form
where F is a norm in \({\mathbb {R}}^n\), i.e. a one-homogeneous convex function in \({\mathbb {R}}^n\). A set E is Wulff shape of H if there exist \(t>0\) and \(x_0\in \mathbb {R}^N\) such that
where \(F_0\) denotes the dual norm of F. It is clear that if F is the Euclidean norm then \(P_F(\Omega )\) is the usual perimeter of \(\Omega \).
Starting from (4.1), the study of critical points of \(P_F(\cdot )\) for volume-preserving variations leads to the condition \(H_F(\Omega ) = C\), where \(H_F(\Omega ) \) denotes the anisotropic mean curvature of \(\Omega \).
Theorem 4.1
(Anisotropic Alexandrov’s Theorem) Let F be a norm of \({\mathbb {R}}^n\) of class \(C^2(\mathbb {R}^N\setminus \{O\})\) such that \(H^2\) is uniformly convex, and let \(\partial \Omega \) be a compact hypersurface without boundary embedded in Euclidean space of class \(C^2\). If \(H_F(\Omega ) \) is constant for every \(x\in \partial \Omega \) then \(\Omega \) has the Wulff shape of H.
A proof of the previous result can be found in [7][Appendix B], [25] and [26].
A relevant quantitative study of the anisotropic Alexandrov theorem was done in [24]. In that paper, the authors generalize the results of [16] to the anisotropic setting and also considered an \(L^2\)-deficit.
We also mention that the approach in [16] may be useful to quantify bubbling in other settings, such as for Yamabe’s type problems and for solutions to critical \(p-\)Laplace type equations (for instance by starting from the approach in [15]).
4.2 Quantitative estimates in space forms
The proximity to a single ball in [22] has been extended by the author and Vezzoni to the hyperbolic space in [23], and a more unified approach to space forms \({\mathbb {M}}^n_+\) (the Euclidean space, the hyperbolic space and the hemisphere) has been done in [21], where more general functions of the principal curvatures have been considered.
Let \(S=\partial \Omega \) where \(\Omega \) is a relatively compact connected open set in \(M^n_+\), and let S be oriented by using the inward normal vector field to \(\Omega \). Let \(\{\kappa _1,\dots \kappa _{n-1}\}\) be the principal curvatures of S ordered increasingly. Let \(\mathsf{H}_S\) be one of the following functions:
-
i)
the mean curvature \(H:=\tfrac{1}{n-1}\sum _{i}\kappa _i\);
-
ii)
\(f(\kappa _1,\dots ,\kappa _{n-1})\), where
$$\begin{aligned} f:\{x=(x_1,\dots ,x_{n-1})\in \mathbb {R}^{n-1} : x_1\le x_2\le \dots \le x_{n-1} \}\rightarrow \mathbb {R}\,, \end{aligned}$$is a \(C^2\)-function such that
$$\begin{aligned} f(x)>0, \text{ if } x_i>0 \text{ for } \text{ every } i=1,\dots ,n-1 \end{aligned}$$and f is concave on the component \(\Gamma \) of \(\{x\in \mathbb {R}^{n-1}\,\,:\,\,f(x)>0\}\) containing \(\{x\in \mathbb {R}^{n-1}\,\,:\,\, x_i>0\}\).
For this class of functions, we can give quantitative estimates of proximity to a single ball in the spirit of [22].
Theorem 4.2
Let S be a \(C^2\)-regular, connected, closed hypersurface embedded in \({\mathbb {M}}^n_{+}\) satisfying a uniform touching ball condition of radius \(\rho \). There exist constants \(\varepsilon ,\, C>0\) such that if
then there are two concentric balls \( B^d_{r}\) and \(B^d_{R}\) of \({\mathbb {M}}^n_+\) such that
and
The constants \(\varepsilon \) and C depend only on n and upper bounds on \(\rho ^{-1}\) and on the area of S.
Moreover, S is \(C^{1}\)-close to a sphere and there exists a \(C^2\)-regular map \(\Psi : \partial B_r^d\rightarrow \mathbb {R}\) such that
defines a \(C^2\)-diffeomorphism from \(B^d_r\) to S and
where N is a normal vector field to \(\partial B^d_r\).
We notice that if \(H_r\) denotes the r-higher order curvature of S defined as the elementary symmetric polynomial of degree r in the principal curvatures of S, then \(H_r^{1/r}\) satisfies ii).
Another important remark is to notice that the extension to non-Euclidean spaces requires to introduce a new concept of closedness between two hypersurfaces. In particular, in this more general context, the key estimate (3.9) is replaced by the following statement:
for any \(p \in \Sigma \) there exists \({\hat{p}}\in {\hat{\Sigma }}\) such that
where \(\tau _p^q:\mathbb {R}^n\rightarrow \mathbb {R}^n\) denotes the parallel transport along the unique geodesic path in \({\mathbb {H}}^n\) connecting p to q.
4.3 Nonlocal Alexandrov theorem
In recent years, a lot of attention has been given to nonlocal problems. Starting from the definition of nonlocal perimeter [12, 13]
for \(s\in (0,1/2)\), boundaries of sets \(\Omega \subset {\mathbb {R}}^n\) which are stationary for the s-perimeter functional are such that the nonlocal mean curvature is constant where, if \(\partial \Omega \) is sufficiently smooth, the nonlocal mean curvature is given by
where \(\chi _E\) denotes the characteristic function of a set E, \(\omega _{n-2}\) is the measure of the \((n-2)\)-dimensional sphere, and the integral is defined in the principal value sense. We notice that the nonlocal mean curvature can also be computed as a boundary integral, that is
where \(\nu _x\) denotes the exterior unit normal to \(\Omega \) at \(x\in \partial \Omega \). In [11] and [14], the nonlocal version of the Alexandrov’s theorem was proved:
Theorem 4.3
If \(\Omega \) is a bounded open set of class \(C^{1,2s}\) and \(H_s^\Omega \) is constant on \(\partial \Omega \), then \(\partial \Omega \) is a sphere.
The quantitative version of Theorem 4.3 was investigated in [14] where it is proved that if \(H^\Omega _s\) has small Lipschitz constant then \(\partial \Omega \) is close to a sphere, with a sharp estimate in terms of the deficit.
It is important to notice that the connectedness of \(\Omega \) does not play a role here. This was indeed expected, since two disjoint balls does not have constant nonlocal mean curvature, since every point of \(\partial \Omega \) influences the value of the nonlocal mean curvature at any other point of \(\partial \Omega \). Hence, in the nonlocal case, one can not expect to have bubbling and the problem is more rigid.
As done in the local case, under suitable regularity assumption on \(\partial \Omega \), in [14] we proved that \(\partial \Omega \) is \(C^{1,\alpha }\) close to a single sphere. Moreover, in the nonlocal case, we can prove something more, namely the \(C^{2,\alpha }\) proximity to a single sphere (see [14, Theorem 1.5]). This result gives an intriguing feature of the nonlocal case, which is the following: if the deficit is small then \(\Omega \) is convex (and close to a single sphere).
References
Aftalion, A., Busca, J., Reichel, W.: Approximate radial symmetry for overdetermined boundary value problems. Adv. Differ. Equ. 4(6), 907–932 (1999)
Alexandrov, A. D.: Uniqueness theorems for surfaces in the large II. Vestnik Leningrad Univ. 12, no. 7 (1957), 15-44 (in Russian); English transl.: Amer. Math. Soc. Transl. 21, no. 2 (1962), 354-388
Aleksandrov, A. D.: Uniqueness theorems for surfaces in the large V. Vestnik Leningrad Univ. 13, no. 19 (1958), 5-8 (in Russian); English transl.: Amer. Math. Soc. Transl. 21, no. 2 (1962), 412-415
Alexandrov, A.D.: A characteristic property of spheres. Ann. Mat. Pura Appl. 58, 303–315 (1962)
Arnold, R.: On the Alexandrov–Fenchel Inequality and the Stability of the Sphere. Monatsh. Math. 155, 1–11 (1993)
Barbosa, J.L., do Carmo, M.: Stability of Hypersurfaces of constant mean curvature. Math. Zeit 185(3), 339–353 (1984)
Bianchini, C., Ciraolo, G., Salani, P.: An overdetermined problem for the anisotropic capacity. Calc. Var. Partial Differ. Equ. 55(4), 55–84 (2016)
Brezis, H.: Symmetry in nonlinear PDE’s. In Differential equations: La Pietra 1996 (Florence), volume 65 of Proc. Sympos. Pure Math., pages 1-12. Am. Math. Soc., Providence, RI, (1999)
Butscher, A.: A gluing construction for prescribed mean curvature. Pac. J. Math. 249(2), 257–269 (2011)
Butscher, A., Mazzeo, R.: CMC surfaces condensing to geodesic rays and segments in Riemannian manifolds. Ann. Sc. Norm. Super. Pisa Cl. Sci. (5) XI, 653–706 (2012)
Cabré, X., Fall, M.M., Solà-Morales, J., Weth, T.: Curves and surfaces with constant nonlocal mean curvature: meeting Alexandrov and Delaunay. J. Reine Angew. Math. 2018(745), 253–280 (2018)
Caffarelli, L., Roquejoffre, J.-M., Savin, O.: Nonlocal minimal surfaces. Commun. Pure Appl. Math. 63(9), 1111–1144 (2010)
Caffarelli, L., Silvestre, L.: Regularity results for nonlocal equations by approximation. Arch. Ration. Mech. Anal. 200(1), 59–88 (2011)
Ciraolo, G., Figalli, A., Maggi, F., Novaga, M.: Rigidity and sharp stability estimates for hypersurfaces with constant and almost-constant nonlocal mean curvature. J. Reine Angew. Math. 741, 275–294 (2018)
Ciraolo, G., Figalli, A., Roncoroni, A.: Symmetry results for critical anisotropic\(p\)-Laplacian equations in convex cones. To appear in Geom. Funct. Anal
Ciraolo, G., Maggi, F.: On the shape of compact hypersurfaces with almost constant mean curvature. Commun. Pure Appl. Math. 70(4), 665–716 (2017)
Ciraolo, G., Magnanini, R., Sakaguchi, S.: Symmetry of minimizers with a level surface parallel to the boundary. J. Eur. Math. Soc. (JEMS) 17(11), 2789–2804 (2015)
Ciraolo, G., Magnanini, R., Sakaguchi, S.: Solutions of elliptic equations with a level surface parallel to the boundary: stability of the radial configuration. J. Anal. Math. 128, 337–353 (2016)
Ciraolo, G., Magnanini, R., Vespri, V.: Hölder stability for Serrin’s overdetermined problem. Ann. Mat. Pura Appl. (4) 195(4), 1333–1345 (2016)
Ciraolo, G., Roncoroni, A.: The method of moving planes: a quantitative approach. Bruno Pini Mathematical Analysis Seminar 2018, volume 9 of Bruno Pini Math. Anal. Semin., pages 41-77. Univ. Bologna, Alma Mater Stud., Bologna, (2018)
Ciraolo, G., Roncoroni, A., Vezzoni, L.: Quantitative stability for hypersurfaces with almost constant curvature in space forms. Preprint (arXiv:1812.00775)
Ciraolo, G., Vezzoni, L.: A sharp quantitative version of Alexandrov’s theorem via the method of moving planes. J. Eur. Math. Soc. (JEMS) 20(2), 261–299 (2018)
Ciraolo, G., Vezzoni, L.: Quantitative stability for hypersurfaces with almost constant mean curvature in the hyperbolic space. Indiana Univ. Math. J. 69, 1105–1153 (2020)
Delgadino, M., Maggi, F., Mihaila, C., Neumayer, R.: Bubbling with \(L^2\)-almost constant mean curvature and an Alexandrov-type theorem for crystals. Arch. Rat. Mech. Anal. 230(3), 1131–1177 (2018)
He, Y.J., Li, H.Z.: Integral formula of Minkowski type and new characterization of the Wulff shape. Acta Math. Sin. 24(4), 697–704 (2008)
He, Y., Li, H., Ma, H., Ge, J.: Compact embedded hypersurfaces with constant higher order anisotropic mean curvatures. Indiana Univ. Math. J. 58(2), 853–868 (2009)
Hopf, H.: Differential Geometry in the Large. Lecture Notes in Mathematics 1000, (1989)
Hsiang, W.-Y., Teng, Z.-H., Yu, W.-C.: New examples of constant mean curvature immersions of \((2k--1)\)-spheres into Euclidean \(2k\)-space. Ann. Math. 2(117), 609–625 (1983)
Jellet, J.H.: Sur la Surface dont la Courbure Moyenne est Constant. J. Math. Pures Appl. 18, 163–167 (1853)
Kapouleas, N.: Complete constant mean curvature surfaces in Euclidean three-space. Ann. Math. (2) 131(2), 239–330 (1990)
Kapouleas, N.: Compact constant mean curvature surfaces in Euclidean three-space. J. Differ. Geom. 33(3), 683–715 (1991)
Kohlmann, P.: Curvature measures and stability. J. Geom. 68, 142–154 (2000)
Koutroufiotis, D.: Ovaloids which are almost Spheres. Comm. Pure Appl. Math. 24, 289–300 (1971)
Krummel, B., Maggi, F.: Isoperimetry with upper mean curvature bounds and sharp stability estimates. Calc. Var. Partial Differ. Equ. 56, no. 2, Art. 53, 43 pp (2017)
Lang, U.: Diameter Bounds for Convex Surfaces with Pinched Mean Curvature. Manuscr. Math. 86, 15–22 (1995)
Magnanini, R., Poggesi, G.: On the stability for Alexandrov’s Soap Bubble Theorem. J. Anal. Math. 139, 179–205 (2019)
Magnanini, R., Poggesi. G.: Serrin’s problem and Alexandrov’s Soap Bubble Theorem: stability via integral identities.. To appear in Indiana Univ. Math. J. arxiv:1708.07392
Magnanini, R., Poggesi, G.: Nearly optimal stability for Serrin’s problem and the Soap Bubble Theorem. Calc. Var. 59, 35 (2020)
Moore, J.D.: Almost Spherical Convex Hypersurfaces. Trans. Am. Math. Soc. 180, 347–358 (1973)
Reilly, R.C.: The relative differential geometry of nonparametric hypersurfaces. Duke Math. J. 43(4), 705–721 (1976)
Ros, A.: Compact hypersurfaces with constant higher order mean curvatures. Rev. Mat. Iberoam. 3(3–4), 447–453 (1987)
Schneider, R.: A Stability Estimate for the Alexandrov–Fenchel Inequality with an Application to Mean Curvature. Manuscr. Math. 69, 291–300 (1990)
Taylor, J.E.: Crystalline variational problems. Bull. Am. Math. Soc. 84, 568–588 (1978)
Wente, H.C.: Counterexample to a conjecture of H. Hopf. Pac. J. Math. 121, 193–243 (1986)
Funding
Gruppo Nazionale per l’Analisi Matematica, la Probabilità e le loro Applicazioni.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ciraolo, G. Quantitative estimates for almost constant mean curvature hypersurfaces. Boll Unione Mat Ital 14, 137–150 (2021). https://doi.org/10.1007/s40574-020-00242-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40574-020-00242-9