
Abstract
An auto rickshaw is a three-wheeled motor vehicle commonly found in Asia, with one front steering wheel and two driven wheels at the back. In automobiles, suspension is used to keep the wheels planted during motion. The trailing arm suspension generally found in Indian automobiles has its roll center on the ground. The vehicle’s center of gravity is above the ground, which creates a moment during vehicle turning known as the roll moment. When this roll moment exceeds a certain limit, the vehicle becomes unstable. Roll rate can be expressed as degrees per lateral acceleration of the vehicle’s sprung mass, and is influenced by factors such as wheel rate, motion ratio, and suspension rate. In order to determine an optimized three-wheeler suspension setup, a matrix selection method was used, in which every available suspension type in the market is rated based on selected suspension parameters such as handling, dynamics, and simplicity. From the overall weightage, each suspension type is analyzed and the most appropriate is selected. In order to achieve the objective of improving the overall rollover stability, certain modifications have been applied in the selected suspension design. Generally, if the roll rate of a specific vehicle axle is high, the percentage of weight transfer on the axle will also be high. By improving roll stiffness, the amount of roll can be decreased, and by optimizing the motion ratio, the roll moment can be controlled, thereby increasing the overall rollover stability.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
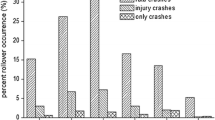
The objective of this work is to optimize the rollover stability of three-wheeled vehicles found in India. An auto rickshaw is a three-wheeled vehicle that is commonly used in Asia, the Middle East, Africa, and certain European countries, as it provides an affordable means of transportation. This mode of transportation has a significant impact on the micro economy of developing countries; therefore, emphasis must be placed on the modernization of the auto rickshaw. According to a survey by the Transport Research Wing of India, approximately 6.4% of motorized road accidents are caused by auto rickshaws [1]. These findings suggest that auto rickshaw safety features must be improved to meet the standards of the current automobile industry. One important area in which safety can be improved is suspension design. The majority of accidents occur as a result of the suspension being incapable of meeting the varying road surface demands. Automobile suspension aids in keeping the wheels planted on the road. Major auto road accidents often occur due to vehicle rollover, which creates an opportunity to improve the suspension setup of the auto rickshaw. By improving rollover stability, auto rickshaw safety can in turn be improved.
Vehicle dynamics refers to the vehicle’s response during motion, in terms of factors such as ride handling, steering, braking, and suspension. Vehicle dynamics is an important part of automobile design, as the vehicle’s entire performance depends on the parameters. Performance factors, such as bump and droop travel (the amount of wheel and suspension travel), dynamic camber change (camber change during cornering leads to excessive roll), roll steer (steering effect seen during bump travel), and roll center migration (constant movement of roll center leading to different roll moment at different points), must all be carefully analyzed in order to optimize the vehicle to its maximum potential [2].
The remainder of this paper is organized as follows. Section 2 discusses the selection of suitable suspension for the (desired) objectives from the available models in the market. Section 3 presents an evaluation of the selected model based on its parameters. In Sect. 4, the selected suspension setup is implemented with design modifications, and validated by numerical calculations in order to optimize rollover stability. The proposed design is analyzed in Sect. 5 using the Adams/Car Software, and conclusions are presented in Sect. 6.
2 Proposed methodology
The suspension type to be recommended is selected from the pool of available suspension setups, for which purpose a weight matrix and parameter importance matrix are used. From these matrices, two highly ranked suspension setups are taken into consideration for examination, which is performed using various parameters such as design simplicity, handling characteristics, and so forth [3]. Using this data, the highest-ranked rear suspension setup is considered for further analysis.
In order to conduct real-time analysis, the basic specification from XYZ Manufacturer’s auto was taken into consideration. Upon extensive design and iteration of kinematic and elasto kinematic parameters of the vehicle, an optimum design can be achieved. From the series of iterations, an optimum design will be finalized with the minimum recommended roll rate. Furthermore, the dynamic performance of the vehicle during bump and droop is evaluated using the Adams/Car multi-body analysis software. Each of the above steps is discussed in the following sections.
2.1 Selection of suspension
In order to achieve the objective of the study, the most suitable rear suspension must be identified and should be redesigned in order to improve its performance. This involves the selection of suitable suspension from the pool of available suspension setups in the market.
2.1.1 Trailing arm
The trailing arm setup is a very simple hinge mechanism. From Fig. 1, it can be seen that it has few parts and a very simple design, allowing for manufacturing ease.

Trailing arm setup
2.1.2 MacPherson strut
This mechanism consists of a strut-type spring and shock absorber accessories, and spins on a ball joint on the solo bottom arm, as shown in Fig. 2. This type of suspension is usually found in the front suspensions of commercial cars, owing to its simplicity and ease of accommodating half shafts for driving the vehicle.

MacPherson strut setup
2.1.3 Double wishbone
This is also known as double A-arm suspension or a semi-trailing arm. As shown in Fig. 3, it consists of two A-arms, which are pivoted to the frame of the vehicle. The wheel is mounted on the spindle or hub, which is placed between the two A-arms. The lower mount of the shock absorber is placed on the lower arm, while the upper mount is placed on the vehicle’s chassis.

Double wishbone setup
2.1.4 Leaf spring
This is a combination of various leaves that are put together to act as a suspension member, as illustrated in Fig. 4. The master leaf bears the major load. The two endings of the leaf spring are affixed to the vehicle’s chassis, or the front end may be attached to the chassis while the rear end is attached through a shackle.

Leaf spring suspension setup
2.1.5 Multilink
Multilink, displayed in Fig. 5, is an advanced type of rear suspension consisting of trailing arms on each side and two or more transverse control arms. It exhibits valuable kinematic and elasto kinematic characteristics, such as prevention effects of torque steer and toe in under-braking.

Multilink suspension setup (Image courtesy: Adams/Car software template)
After surveying the available suspension setups, the parameters with which each setup is evaluated are defined and their importance in the evaluation process is studied.
2.1.6 Simplicity
For this parameter, the number of movable parts in each suspension system was investigated. More movable parts lead to a more complex system, whereas less parts provide cost-effectiveness. Therefore systems with less parts and a simple design were given higher preference. MacPherson, having only one strut with an upper pivot point and a lower control arm with a lower pivot point, was given the maximum score, while multilink has many movable links, was given the minimum. From Fig. 2, it can be seen that the MacPherson setup contains less moving parts, and is therefore a simpler system.
2.1.7 Handling
Handling properties such as kinematic changes, cornering characteristics, roll center movement, camber change, and wheel wobble were taken into account when scoring each suspension’s handling characteristics. Because the trailing arm provides cornering characters and camber change, it was given a high score, while MacPherson was given the lowest owing to it having less handling properties.
2.1.8 Space constraint
The space requirement was judged taking into consideration a wheelbase of 1 980 mm and track width of 1 150 mm. The ground clearance for XYZ Manufacturer’s auto was set at 16.5 cm, which was not compromised. Therefore, the systems requiring more lateral and longitudinal space, namely multilink and leaf spring, were given the lowest score.
2.1.9 Manufacturing ease
In this case, simplicity of design, ease of manufacturing process involved, lower number of parts and fasteners, specific materials required, and the machinability and manufacturing process that consumes less time were given higher importance. The trailing arm design is very simple, with a hinge mechanism, and only mounting clamps and the trailing arm need to be manufactured; therefore, it was given the highest score.
2.1.10 Dynamics
The desired vehicle dynamics characteristics are high roll resistance, sufficient bump and droop travel, and absorption of lateral as well as vertical load. Furthermore, certain aspects of logical thinking on the different suspension setups and their effects during a real state scenario were analyzed and graded. As a result, multilink was given the highest score with the maximum dynamics properties.
2.1.11 Service ability
This parameter was estimated by considering aspects from the consumer’s point of view, such as durability, easily replaceable parts, maintenance costs, low-cost parts, interval between services, and ease of servicing the setup. These parameter types were given logical thinking and grades were assigned. As the trailing arm and semi-trailing arm exhibit superior durability, they were given a high score. Following analysis of the suspension setups and validating parameters, each suspension setup was scored in descending order from 5 to 1,with the maximum score being 5 and the minimum being 1, using the weightage matrix method [3]. These results are displayed in Table 1.
After determining the weight matrix, a parameter importance matrix was used, which aids in establishing the importance of each parameter relative to the others in order to evaluate from a common platform, where 1 indicates equal importance, 2 more importance, and 0 less importance [3]. These results are displayed in Table 2.
After grading each parameter, a percentage value was obtained, which was multiplied with the grades of the weight matrix for the corresponding parameter, and the final rating for each suspension setup was determined. These results are displayed in Table 3.
Without the use of the parameter importance matrix, a suspension setup with high scores for less important parameters could be selected. However, the use of the parameter importance matrix aids in establishing the overall impact of each parameter [3]. Therefore, rear suspension setups with a high overall rating were selected.
3 Evaluation
After considering numerous selection criteria (as detailed in the previous section), the trailing arm and semi-trailing arm setups (see Fig. 6) were graded the highest. Both of these offer a number of advantages; therefore, in order to select the most appropriate setup, their characteristics were closely studied, and are presented in the following sections.

Semi-trailing arm setup (Image courtesy: Adams/Car software template)
3.1 Trailing arm
The trailing arm setup is a very simple mechanism. The wheel is connected to one end of the trailing arm, while the further end is attached to the chassis through two pivot bushes [4]. As shown in Fig. 1, the axes of the suspension bushes are normal to the longitudinal axis of the vehicle and analogous to the ground, forming an instant axis. In the side view, the instant center is at the bushes, while in the front view it is at infinity.
For a trailing arm setup, the roll center is at the ground; therefore, in the front view there will be no camber change with respect to wheel travel. In the side view, the instant center is the only variable, as the arm length is fixed. Therefore, there will be no toe change, resulting in zero roll steer.
3.2 Semi-trailing arm
This setup is similar to that of the trailing arm; as indicated in Fig. 6, and the only difference is that the bushing pivot axis is at an angle to the vehicle axis [4]. Therefore, the instantaneous center is present, about which the vehicle rolls during the wheel travel, resulting in a change in camber. The roll center may be either above or below ground, depending on the setup. Because of the instantaneous center movement with wheel travel, the toe is subjected to change in both bump and droop. Therefore, the semi-trailing arm exhibits two disadvantages: camber change in a straight line and toe change in a curved line.
It can be clearly understood that the trailing arm setup provides effective stability in straight as well as curved lines. For both setups (trailing and semi-trailing arm), behavioral analyses when turning a corner indicate that the trailing arm has an advantage over the semi-trailing arm in that the camber and toe change during a corner is absent in the trailing arm, giving it more rollover stability. Hence, the trailing arm is chosen as the rear suspension and further design modifications and analysis are carried out, as explained in the forthcoming sections.
4 Design modification
Having selected the trailing arm as the rear suspension, further design modifications were carried out in order to achieve the objective. The design modifications were based on numerical calculations for optimizing rollover stability using the following formulae [2, 5].
4.1 Wheel rate
The wheel rate \(\left( {K_{\text{r}} ,{{\text{N}} \mathord{\left/ {\vphantom {{\text{N}} {\text{m}}}} \right. \kern-0pt} {\text{m}}}} \right)\) is the vertical force per unit movement (at the wheel) measured in terms of the chassis [2].
where the sprung mass \(m_{\text{s}}\) is the vehicle mass carried by the suspension in kilograms; \(f\) is the natural frequency, from 1 Hz to 1.5 Hz for passenger comfort range.
4.2 Suspension rate
When a suspension is compressed or stretched, the force it exerts is proportional to its length, and this rate is termed as the suspension rate.
where \(K_{\text{s}}\) is suspension rate (N/m); \(K_{\text{t}}\) is the tire stiffness and the value is 450 kN/m which is the optimized value obtained for a low-profile rated tire [6] from the real-time estimation of tire stiffness [7].
The suspension rate can be calculated from Eq. (2), and is dependent on the spring mounting and orientation. As the spring mounting relative to the wheel mounting varies, the motion ratio also varies, resulting in a different wheel rate. The relation between the suspension rate and motion ratio \(r_{\text{m}}\) can be represented as
4.3 Spring roll rate
This is the rate (\(r_{\text{s}}\)) at which the spring displaces per unit degree of roll
where \(W_{\text{t}}\) is the track width which is the distance between the centers of wheels when viewed from the front (m).
4.4 Roll moment
This is the moment generated due to the difference between the center of gravity and roll center height. As the vehicle turns a corner, this difference in height creates a moment to roll the sprung mass about the vehicle’s vertical axis [8]. The roll moment is generally created during a corner for which a unit lateral acceleration of g-force is usually recommended. The roll moment of 1 g of lateral acceleration, \(m_{\text{r}}\), can be obtained as
where \(C_{\text{g}}\) is the height of center of gravity from ground (m); and \(R_{\text{C}}\) is the roll center height from ground (m).
4.5 Roll rate
Roll rate (\(r_{\text{r}}\)) is the moment (torque) per degree of body roll [2], and can be per axle or vehicle.
Roll rate refers to the differential change in tire normal force as the body is rolled about its roll axis, which generally depends on the ride rate, track width, and antiroll bar stiffness. Roll rate is expressed in terms of angle turned per g-force of lateral acceleration.
4.6 Motion ratio
Ideally, when the spring is directly as well as vertically above the wheel center line, the wheel rate will be equal to the spring rate; however, this is not possible due to packaging constraints.
This (packaging) constraint results in two options:
-
(i)
Mount the spring outboard, as in the conventional layout. The spring’s upper pivot point will be mounted on the chassis, while the and lower pivot point will be mounted on the lower wishbone or hub carrier.
-
(ii)
Mount the spring inboard and actuate it with a rocker arm or, usually, an upper wishbone.
In both cases, a certain amount leverage is applied to the spring, meaning that the wheel rate will be less than the spring rate and the linear distance traveled by the wheel will be larger than the spring’s extension or compression. Based on this, the concept of motion ratio is introduced, which relates the wheel travel to that of the spring axis.
4.7 Iteration
The wheel rate must firstly be determined using Eq. (1) with the basic vehicle specifications. From the obtained value, the suspension rate can be established by means of Eq. (2). For different motion ratios, corresponding new wheel rates must be calculated using Eq. (3). With this new wheel rate,the corresponding spring roll rate is determined using Eq. (4). Then, the roll moment is found with Eq. (5), and finally, the roll rates for different obtained values are iterated using Eq. (6).
For the iteration process, specification data were obtained from XYZ Manufacturer’s auto, for dimensions such as wheelbase, track width, and caster angle, among others, as shown in Table 4. The weight distribution was also calculated from the data [9].
4.7.1 Weight and load transfer
This phenomenon occurs due to the inertial effect of the vehicle’s weight. During acceleration, the vehicle’s weight is pushed backward, whereas during deceleration, the weight of the body is pushed forward. This is known as dynamic load transfer.
We calculate the weight distribution for the design-specified auto. The data for individual subcomponent weights are provided in Table 5. The total weight of the auto is approximately 603 kg.
According to Table 5, the total weight is the sum of all components, and the value is 603 kg. The sprung mass is the sum of frame assembly, power train and half of steering and suspension, and its value is 560 kg. Therefore, the remaining mass (that is, \(603 - 560 = 43\,{\text{kg}}\)) will be the unsprung mass.
Once the sprung and unsprung masses have been determined from the data, these values are used in the series of Eqs. (1)–(6) and iterated. The maximum and minimum wheel travel that the suspension setup can handle, considering the chassis limitation and ground clearance, was obtained [2] and with that, the maximum and minimum motion ratios were determined, and found to be 0.5–1.2 from the iterations. The obtained values for different motion ratios are listed in Table 6.
Thus, iteration was carried out on different motion ratios and certain observations were made. The roll rate of \(5.5^\circ{/}{\text{g}}\) lies between semi-firm and firm suspension roll rates, which is desirable for a road vehicle [2]. If the suspension is fully firm, it will not lean in when turning a corner, which will affect the vehicle handling. If the suspension is less firm, the vehicle can easily roll around the corner, leading to the maximum rollover. Thus, the roll rate of \(5.5^\circ{/}{\text{g}}\) corresponding to a 0.90 motion ratio is the optimum value for the desired design. The roll rate represents the amount of sprung mass rolls per gram of lateral acceleration. Therefore, the roll rate of 5.5 \({{/} {\text{g}}}\) is an optimum value for an auto, considering its suspension setup as well as weight.
4.7.2 Angle of inclination
The angle at which the shock absorber is inclined plays an important role. If the shock absorber is mounted perpendicularly to the wheel travel, spring stiffness will be greater, as large magnitudes of force must be absorbed. When the shock absorber is mounted perpendicularly to the wheel travel, the total upward force is applied to the shock absorber, which in turn resists the motion, leading to a stiffer setup.
When the shock absorber is mounted at an angle to the wheel travel, the downward force of the shock is divided into x-axis and y-axis components. As the wheel goes over a bump, it compresses the shock absorber, as the downward resisting spring force is resolved into two components; hence, it becomes relatively soft and aids in the upward wheel movement during a bump.
An important conventional rule of thumb exists in positioning the shock absorber. As the trailing arm is pivoted in one point during its motion in bump and droop, the wheel end of the arm follows an arc-like motion. Therefore, the conventional method is for the shock absorber to be placed at a tangent angle to the trailing arm motion. Through various iterations, it was determined that the best possible inclination of the shock absorber from the horizontal axis was approximately \(40^\circ\text{--}50^\circ\). This was employed in the Adams/Car simulation in order to test the bottoming out of the shock for various angles, from which \(40^\circ\text{--}50^\circ\) also yielded optimal results.
5 Analysis
Adams is a multi-body dynamic analysis software, which can be used to analyze the motions of mechanical systems. With the aid of Adams, dynamic forces can be studied and the load transfer throughout the mechanical systems analyzed [9]. Adams removes the necessity for physical building as well as testing of a prototype, which is time-consuming and costly. Furthermore, it makes it easier to implement corrections to the prototype after several testing iterations. Thus, Adams/Car was used to analyze the suspension setup. The design modifications, such as motion ratio of 0.90 and roll rate of \({{ 5. 5^\circ } \mathord{\left/ {\vphantom {{ 5. 5^\circ } {\text{g}}}} \right. \kern-0pt} {\text{g}}}\), were incorporated in analysis. Therefore, the trailing arm suspension was modeled with the geometry and measurements found in the specifications (see Table 4) and shown in Fig. 7.

Rear suspension after design modification
In order to demonstrate that the proposed model exhibits higher rollover stability, Adams simulation was carried out. Normally, centrifugal force acts on a vehicle when it takes a turn. Therefore, the inner wheels lift upward, which can be compared to a wheel over a bump, whereas the outer wheels are pushed downward, which can be compared to wheel droop. For this reason, opposed wheel simulation was carried out [10], which precisely demonstrates bump and droop simultaneously (see Fig. 8). Bump and droop were taken as 250 mm throughout the experiments, after which the shock absorber will bottom out.
It should be noted that the spring must bottom out first; if not, half of the shaft’s constant velocity joint will come out during a bump or droop, resulting in transmission failure. From the analysis, post-processing graphs were studied, which are discussed in the following section.

Simulation of the setup
5.1 Results and discussions
5.1.1 Camber graph
From Fig. 9, it can be seen that there is no camber change during bump; furthermore, the wheel is in zero camber in a static position. As a result of the optimized setup, when the wheel goes over bump, there is no camber change (at all). This can be inferred from the plot where the line is rather flat over the wheel travel range.

Camber angle versus wheel travel
5.1.2 Toe graph
Similarly, the change in toe in the trailing arm is ideally absent (see Fig. 10). It is because the trailing arm is pivoted perpendicularly to the vehicle’s longitudinal axis, resulting in no toe change during bump and droop. This graph precisely depicts the ideal state in which, for a given wheel travel, there is no toe change and therefore no roll steer, because a toe out in the rear right wheel will cause the same wheels to turn toward the right side, making the vehicle unstable over a bump [11, 12].

Toe angle versus wheel travel
As the camber was not induced during a corner, the vehicle’s rollover stability was higher. Furthermore, there was no toe change during a corner, and as a result, no roll steer, which contributes to the vehicle’s stability [12,13,14,15]. The scale of this graph should be carefully noted; that is, the y-axis is in units of 0.03, whereas the x-axis is in a scale of 17. Upon magnification, it should be understood that there is not much toe change at all during wheel travel. For a rear-wheel drive with independent suspension, toe change is an undesirable effect.
6 Conclusions
The highlights of the work performed are as follows.
-
(i)
Although various previous works have been conducted on the stability performance of the auto rickshaw (using the Adams/Car 3D model), in terms of the maximum speed with which a corner can be taken, no real insight was provided into suspension parameters such as roll rate, motion ratio, and shock absorber inclinations. This work has attempted to improve on these parameters.
-
(ii)
From the results obtained, it can be confirmed that the rear suspension roll rate is at the optimum value, owing to higher roll stability during a turn. The motion ratio of 0.90 yielded the optimum roll rate of \({{ 5. 5^\circ } \mathord{\left/ {\vphantom {{ 5. 5^\circ } {\text{g}}}} \right. \kern-0pt} {\text{g}}}\), and iterations were performed to determine the appropriate shock absorber positioning and orientation. The most appropriate shock absorber inclination was found to be approximately \(40^\circ\text{--}50^\circ\) from the horizontal x-axis.
-
(iii)
As the camber was not induced during a corner, the vehicle’s rollover stability was higher. Furthermore, there was no toe change during a corner, and as a result, no roll steer, which adds to the vehicle’s stability of the vehicle [13,14,15].
Therefore, from the Adams/Car simulation results of the proposed suspension setup, it can be confirmed that the auto’s handling during a turn is highly stable, as there is no dynamic change in wheel parameters.
References
https://data.gov.in/catalog/stateut-wise-total-number-road-accidents-persons-killedinjured
Milliken WF, Milliken DL (1995) Race car vehicle dynamics. Society of Automotive Engineers, Troy
Thomas G, David T (2012) Development of an auto rickshaw vehicle suspension. Dissertation, Lulea University of Technology, Sweden
Polisetti S, Gowda S, Khanna NK et al (2016) Methodology for durability evaluation of an automotive trailing arm damper pin using road load spindle acceleration. SAE Techn Pap. doi:10.4271/2016-01-0408
Farrington JA (2011) Redesign of an FSAE race car’s steering and suspension system. Dissertation, University of Southern Queensland, Australia
Karjalainen M (2016) Real-time estimation of tire stiffness. Dissertation, Linköping University, Linköping
Taylor RK, Bashford LL, Schrock MD (2016) Real-time estimation of tire stiffness methods for measuring vertical tire stiffness. Dissertation, Linköping University, Linko¨ping
Gillespie TD (1992) Fundamentals of vehicle dynamics. Society of Automotive Engineers Inc, Warrendale
Karanam VM, Chatterjee A, Ghosal A (2011) Procedural aspects of modeling the dynamics of a three wheeled vehicle using ADAMS-CAR. Mechanical Engineering, http://eprints.iisc.ernet.in/id/eprint/40423
Sert E, Boyraz P (2016) Enhancement of vehicle handling based on rear suspension geometry using taguchi method. SAE Int J Commer Veh 9(1):1–13
Ovcharik M (2006) Suspension alignment: understanding and adjusting toe. http://www.eioba.com/a/457/suspension-alignment-understanding-and-adjusting-toe
Karanam VM, Ghosal A (2013) Studies on wobble mode stability of a three-wheeled vehicle. Proceed Inst Mech Eng Part D J Automob Eng 227(8):1200–1209
Staniforth A (1991) Competition car suspension: design, construction, tuning. Haynes Publishing, Sparkford, UK
Smith C (1978) Tune to win: the art and science of race car development and tuning. Aero Publishers, Fallbrook
Zandieh A (2014) Dynamics of a three-wheel vehicle with tadpole design. Dissertation, University of Waterloo, Ontario, Canada
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Sree Ram, S.A., Raja, P. & Sreedaran, K. Optimization of rollover stability for a three-wheeler vehicle. Adv. Manuf. 5, 279–288 (2017). https://doi.org/10.1007/s40436-017-0191-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40436-017-0191-8