
Abstract
In this paper, structural design optimization of box-type double-girder overhead crane was performed using weighted decision matrix and finite element analysis (FEA). Primarily, structural design calculations were achieved for 280 proposed crane case studies, then crane design parameters values were optimized using the weighted decision matrix technique based on three concepts, and these are minimum weight, minimum deflection, and minimum stress. This was followed by building and modeling the optimum crane design related to each concept using solid works software, and FEA was performed. The results showed that minimum weight concept led to the optimum crane design with minimum weight and minimum cost but with mean deflection and mean stress values. However, minimum deflection concept led to the optimum crane design with minimum deflection and minimum stress but with much higher weight, while minimum stress concept led to small deflection and small stress values but with high weight as well. Crane design was also verified by manufacturing and testing a real crane case study.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Overhead cranes are applicable in different industries, as in automobile plants and shipyards. Design specifications of overhead cranes differ widely according to their main functioning features, such as type of motion of crane structure, weight and load type, crane location, geometric features and environmental circumstances. There are numerous categories of overhead cranes, but the main categories are: (a) Top running; it can be single-girder bridge crane or double-girder bridge crane. (b) Under-running that is single-girder bridge crane [1]. When capacities exceed 30 tons, electric overhead cranes (EOC) are commonly the type chosen. In this paper, optimum design of a double-girder bridge belonging to ‘top running‘ category is studied, which is shown in Fig. 1.

Double-girder electric overhead crane, reproduced from [1]
By tradition, methods of structural analysis were based on difficult scientific techniques such as mathematical methods, theoretical mechanics, and methods of numerical simulation. Though, three decades before novel groups of computational techniques indicated as soft computing techniques have been suggested. They are based on empirical methodologies rather than on rough mathematics. The use of these methods in numerous fields of engineering science is unceasingly increasing in spite of being received with suspicion at the beginning; they have seemed to be unexpectedly powerful in many cases. Meta-heuristics, artificial neural networks (ANN), and fuzzy logic are the most widespread soft computing techniques. Other algorithms related to soft computing techniques and optimization are evolutionary programming [2], evolution strategies [3], genetic algorithms [4], the particle swarm optimization [5] algorithm, the differential evolution [6], harmony search [7], and others. The weighted decision matrix method was invented by Stuart Pugh [8]; it is a qualitative technique used to weight the multi-dimensional choices of an option set. It is commonly used in engineering application for making design decisions, but it can also be used to rank asset, vendor, or product options or any further set of multidimensional objects [9].
Because of the growing tendency on the materials’ prices and the increasing request on heavy duty with different dimensions crane box girders, the use of up-to-date design optimization methods turns out to be a necessity. However, slight attention has been paid on the optimum design of cranes, since the majority of the crane developers and manufacturers have standardized the box section single dimension for many spans and duties crane bridges to attain manufacturing easiness. Seeßelberg [10] performed the optimization of assembled cross sections through the use of reinforced rolled sections and a single symmetrical welded I section, where the purpose was to minimize the area of cross section, while keeping design limitations satisfaction of the serviceability, ultimate and fatigue. Another design optimization technique for a double-girder overhead crane (DGOC) was proposed in [11]. Structural design calculations were proposed by F. E. M Rules and DIN standards to confirm the stress and deflection values. Then the crane design was modeled using both solid works and finite element analysis (FEA). By comparing FEA and conventional calculations, the analysis related to quadratic shell elements gave the most accurate results. The design optimization methodology proposed by Zuberi et al. [12] was to start the process by feeding crane specifications and previously defined box girder design variables into the early designed computational spreadsheet in MS Excel. Then taking the best design variables set from the spread sheet and using the design optimization simulations to compute optimal volume of the girder. But the actual vertical deflection exceeded the allowable deflection in all results. Kastratovic and Mijailovic [13] dealt with the problem of optimization of cross section in lattice boom of tower crane; the total mass of the structure was taken as the objective function. Pinca et al. [14] analyzed the tension and deformation form of an overhead crane bridge structure using the COSMOS software which enables the making of evolved finite items—shell-type with three or four nodes per element. It provided enough data and valuable solutions for the analysis required in case of finite items. Sun et al. [15] reached an optimal design of a LD-A-type crane beam structure applying 3D simplified crossbeam models. Gašić et al. [16] investigated the determination of relationships among geometric parameters to get the optimal shape of the cross section of the girder of the crane. Lerga [1] firstly built a crane model using conventional calculations technique and then he proposed another two models. In these models the possible variants for reducing the mass of the first initiated model have been studied. The key concept of the new designs originates from the well-known idea that positioning the primary girder rails above one of the primary girder side plates will lead to a reduction in the bridge structure mass. Two types of holes were cut at side plate. A significant mass reduction was achieved, but the holes became stress concentration areas. Suratkar et al. [17] assumed a section for certain girder capacity, then manual calculations were done for checking with finite element results and comparison, but there was a suitable low weight design without exceeding design constraints such as the allowable vertical deflection. An energy-saving optimization design by means of FEA was performed by Yifei et al. in [18] using ADMAS and MATLAB software. Shape, size and topology optimization were studied proposing shape, size, and topology optimal mathematical models. The results showed a great reduction of total crane mass by using the FEA and optimization technology premised on the design necessities of cranes as stiffness and strength. Delić et al. [19] made conventional calculations and then designed the basic model structure of bridge crane taking into consideration the working area allowed for the motion of the crane, the length of the bridge crane, and the range of motion of the bridge as important limitations. Numerical analysis of the 3D finite element in the software CATIA V5 was made. Error ratio between analytical and FEM analysis was large for stress and deflection values. Wang et al. [20] attained the crane girders optimal design using an improved genetic algorithm floating-point encoding technique. Lagaros and Papadrakakis [21] presented a critical valuation of three meta-heuristic optimization algorithms, namely differential evolution, harmony search, and particle swarm optimization. These were used to get real-world structures optimum design. The suggested method was applied to an overhead crane structure using FEA simulations.
To the best of our knowledge, the weighted decision matrix optimization technique was not considered before in DGOC structural design optimization. Further, the crane weight, deflection, and stress concepts which are the most significant performance indicators are taken into account in this study to reduce crane cost and enhance its performance. In this work the structural calculations of crane girder design were made using excel program for 280 crane case studies, then the weighted decision matrix technique was used for optimization without exceeding design limitations to infer the girder section dimensions with three concepts, and these concepts are minimum weight, minimum deflection (high stiffness), and minimum stress. After that, FEA was used to verify the best model design in each concept.
This paper is divided into six sections. The first section is the introduction. In section two the weighted decision matrix is introduced, in section three FEA method is presented, then experimental work and results is summarized in section four, DGOC manufacturing and testing is shown in section five, and finally conclusions and future work are drawn in section six; this is followed by the references used in this work.
Weighted Decision Matrix
Weighted decision matrix theory is based on the utility theory which develops values for usefulness and probability theory which assesses our state of knowledge. It is an optimization technique related to the study of identifying and choosing alternatives based on the values and preferences of the decision maker. Decision theory has been applied more to business management situations. When being faced with situations, in which a choice has to be made between different alternatives, the use of weighted decision matrix is recommended; the potential for future applications of decision matrix in the engineering design is very strong [22, 23]. Weighted decision matrix has been used in engineering field as design of engineering parts [24]. For example, Zeiller and Edlinger [25] used the decision matrix to provide management with a simple easy tool without having to perform complex and time intense analysis concerning a design of a re-configurable assembly fixture.
Making a decision implies that there are alternative choices to be considered, and in such a case where it is required not only to identify as many of these alternatives as possible but to choose the one that best fits with the goals. Weighted decision matrix is used to evaluate the competing design concepts by ranking them with weighting factors and scoring the degree to which each design concept meets the criteria. Thus, it works as a qualitative tool to evaluate the alternatives [26].
Weighted decision matrix contains many steps; the first step is to identify the criteria; the more specific the criteria are, the better will be the results of the evaluation, and it is also desirable to have the criteria that are independent of one another. The second step is to rank and weigh the criteria; some criteria are probably more important than the others. The relative ranking of the criteria will certainly affect the evaluation. It is therefore preferable to find out a way of assigning weights to the criteria based on their relative preferences and values; the sum of weights of all criteria must be 100%. The third step is calculating the rate of each criterion by normalizing the criterion value by its maximum allowable value. The fourth step is to calculate criterion score; this is achieved by multiplying the weight of each criterion by its rate. Then the overall score is calculated; the overall score is the sum of the overall score for a particular design concept. The overall score with the lowest value represents the optimum design case. Finally, going back and reviewing how the values were assigned or weighted to certain criteria may take place until reaching more meaningful results [22, 23, 26]. Those steps are illustrated in Fig. 2, and the mathematical representation is illustrated in Eqs. (1), (2), and (3).

Weighted decision matrix steps
Let:
-
ni: the selected criterion, i = 1, …, m. Where m is the number of selected criteria.
-
ni,all: maximum allowable value for criterion ni.
-
wi: rank or weight factor assigned to criterion number i.
where Si: score of criterion number i; Ri: rate of criterion number i.
where St: overall score.
Finite Element Analysis Method
FEA has many applications in the engineering field [27]. FEA starts with the preprocessing stage where the geometric domain of the problem, the element type, the material and geometrical properties of the elements, boundary conditions, and the loadings are defined. In the solution stage, FEA software assembles the governing algebraic equations in matrix form and computes the unknown values of the primary field variable (s). The computed values are then used by back substitution to compute additional derived variables, such as reaction forces, element stresses, and heat flow. The third stage is post-processing, where equilibrium checking, factors of safety calculations, plot of deformed structural shape, dynamic model behavior animation, and color production take place. Figure 3 presents a simplified view of the physical simulation process. Body model is divide into an equivalent system of many smaller bodies or units (finite elements) interconnected at points common to two or more elements (nodes) and/or boundary lines and/or surfaces [28,29,30]. Finite elements can be a primitive structural, continuum, special, macro-elements, and substructures, as illustrated in Fig. 4.

A simplified view of the physical simulation process, reproduced from [28]

Examples of: a primitive structural elements, b continuum element. c Special element, and d macroelement, reproduced from [28]
Experimental Work
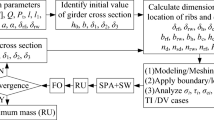
Experimental work contains three main steps which start with structural design calculations for the 280 crane case studies, followed by applying the weighted decision matrix technique for sake of optimization, and a verification of the work was presented using FEA technique. A summary of experimental work is illustrated in Fig. 5.

Experimental work main steps
Structural Design of Double-Girder Overhead Crane
The principal loads in the design process are dead load, trolley load, and lifted load. The dead load was represented by the weight of all effective parts of the bridge construction, the machinery parts and the fixed equipment are sustained by the structure. While the trolley load represents the weight of the trolley with its attached equipment, the lifted load consists of the working load and the lifting device weight which used for handling and holding the working load such as the load block [31].
Crane Specifications and Parameters
The overhead electric crane contains three primary motions. These motions are hoisting, long travel and cross travel. A double-girder EOC is built of welded box-type structure with a steel plate. A double box girder is fitted to the end carriage assembly. A trolley assembly is placed on the rails which are welded to double box girder [17]. The major calculations pertain to DGOC, by Indian Standard Rules (ISR) 807: 2006, and Egyptian Code Practice (ECP). ISR were used in this work because of its availability, clearness, and being widely used in previous literature. The crane has normal duty cycle main load capacity 10 ton. The major crane parameters are listed in Table 1. The main dimensions are shown in Figs. 6 and 7.

Metal structure with major dimensions [1]

Main girder partial view, reproduced from [1]
In DGOC, there are two identical main girders, each one is 23,412 mm long and consists of the top flange, the bottom flange (thickness 10 mm, width 550 mm), side plates (thickness 6 mm), and main and aux diaphragms (thickness 6 mm). The mass of a single main girder is 5706 kg; the major components (elements in assembly) of the girder are shown in Fig. 8 based on the part number mentioned in Table 2, and the cross section is shown in Fig. 8 also.

Main girder cross section
The different elements and dimensions of the main beam in Figs. 6 and 7 were named as follows:
H: girder height; H1: height of supporting cross section; B: flange width; h: inner crane height; tw: web thickness; tf: flange thickness; b: inner width; M: crab base; c: chamber length; a: main diaphragms distance; a1: aux diaphragms distance.
Design Constraints
For rigidity necessities the following maximum values for the deflection of the crane girder must normally not be exceeded in order to avoid undesirable dynamic effects, and to secure the function of the crane [32]. For a bridge crane the vertical deflection which is defined as the maximum permissible deflection ratio allowed for a lifting device is usually equal to L/700 (few specs require L/900), where L is the span of the bridge crane. The horizontal deflection which is the maximum deflection ratio allowed for a bridge crane or runway should be L/600 [31]. Certain design constrains were used in this work for a welded box girder [12]; these constrains are as in the following:
-
Ratio L/b should not exceed 65.
-
Ratio h/tw should not exceed 240.
-
Ratio b/tf should not exceed 60.
-
‘a’ should not exceed depth h of the section.
-
‘H1’ should be 0.35 h to 0.4 h.
-
‘c’ should be 1/8 th to 1/6 th of L.
-
tdia is kept between 2 and 6 mm [12].
-
where
-
tdia: diaphragm thickness, other parameters were defined earlier in this work.
Crane Case Studies Preparation
Starting with crane height H equals to 950 mm to the first 10 crane cases, then increasing H with 10 mm step to the next ten crane cases, and so on, till H equals to 1250 mm to the last ten crane cases. Flange thickness tf was taken as 10, 12, and 14 mm. Web thickness tw was taken as 6, 8, and 10 mm. Geometric constraints were applied as in Eqs. (4), (5) and (6) [12], and summarized in Table 3. Hence, 280 crane case studies were prepared.
Other Notations used in calculations:
Tc: trolley wheel center to center, Wd: design Load, Wg: self-mass of girder, Wt: self-mass of trolley, Wcr: self-mass of crane, Wwm: maximum wheel load, Wec: self-mass of end carriage, M1: bending moment due to live load, M2: bending moment due to self-mass of girder, Mmax: maximum bending moment, Z: section modulus, σall: allowable stresses, σb: maximum bending stresses, Ixx: moment of inertia at X-axis, R: rated capacity, S.F: service factor, ψ: dynamic coefficient factor (ψ = 1.32), D.F: duty factor (D.F. = 1.06) [32], RA: tangential force used to calculate shear stress, Mt: torsional moment, pi: inertia force, qi: inertia force in the opposite direction, e: center distance between diaphragm 1 and diaphragm 2, τeq: equivalent stress, ttortion: torsional stress, τsh: shear stress, f: maximum static deflection, fall: allowable static deflection, ∆LL: live load deflection, ∆DL: dead load deflection.
Structural Design Calculations Steps
-
(1)
Design load calculations
First design load was calculated using Eq. (7). Then the maximum wheel load was calculated as in Eq. (8).
-
(2)
Bending moment and bending stress calculations
The bending moment due to live load was calculated using Eq. (9). Calculations of bending moment due to self-mass of girder were done using Eq. (10). Then the maximum bending moment was calculated using Eq. (11); the maximum bending stress was obtained using σall Eqs. (12), and (13). The maximum bending stress should not exceed the allowable bending stress that was proposed as σall = 154 N/mm2 [33].
-
(3)
Shear stress calculations
Calculations of shear stress were done using Eq. (15). The tangential force RA used in shear stress calculations was defined for two cases: (a) when one of the crab wheels was right on the corresponding support as in Fig. 9a, (b) Crab was in the mid-span as shown in Fig. 9b. RA can be calculated from Eqs. (16) and (17) according to the case (a) or case (b) respectively. Equation (18) shows that the allowable shear stress should not be exceeded. Allowable shear stress was proposed \({{\tau }}\)all = 84 N/mm2 [33].
where P = Wwm = 56 KN; GM = 0.5 Wg = 44 KN; and Tc = 1300 mm.

Evaluation of tangential forces RA: a one of the crab wheels is right on the corresponding support, b crab is in the midst
-
(4)
Torsion stress calculations
In calculations of torsion stress, the maximum torsion stress in random torsion of a closed box is defined, and it could be calculated for supporting cross sections as in equations from Eqs. (19) to (24). ttortion is in the wall midst as shown in Fig. 10. Equivalent tangential stress in support cross section is defined as a sum of shear and torsion stresses and calculated from Eq. (25).

Inertia loading in the main girder: a supported cross section, b main cross section
where
where
-
(5)
Stiffness checking calculations
In stiffness checking step, two stiffness checks were made, static and dynamic. Static check verifies maximum static deflection f of the construction under static loading of the actual load and crab allowable vertical deflection \(f_{\text{all}} = \frac{L}{750}\) [32] using Eqs. (26) and (27). The maximum static deflection f should not exceed allowable deflection as in Eq. (28).
where E is the elastic modulus of steel, it equals 210,072 MPa. Ixx, Wwm, and L were defined earlier in this work.
-
(6)
Camber calculations
The girder was cambered to an amount approximately equal to the dead load deflection ∆DL plus one-half the live load deflection ∆LL as shown in Fig. 11. And it was calculated as in equations from Eqs. (29) to (31).

Camber scheme
Hence, stress, deflection, safety and camber were calculated without exceeding their allowable values. Figure 12 shows a part of the Excel program designed to make calculations for the crane 280 case studies.

Structural design calculations in excel program
The optimization of girder depth along the span has also been considered by including web thickness and crane height variables. These two parameters reduce sufficient amount of weight under limitations imposed by design constraints.
The results of crane structural design were mentioned in the following:
Table 4 shows the parameters and calculation results of the optimum design of the crane girder dimensions with minimum weight concept, which was Case 1A; another two cases are shown for comparison (Case 2A, and Case 3A). The results of the all 280 case studies didn’t exceed the allowable stresses. While the girder weight had the minimum value in Case 1A, it had the midst values of maximum bending stress and maximum deflection.
Table 5 shows the parameters and calculation results of the optimum design of the crane girder dimensions with minimum deflection concept, which was Case 1B; another two cases were shown for comparison (Case 2B, and Case 3B). The results of the all 280 case studies didn’t exceed the allowable stresses. Case 1B had the smallest deflection, the smallest stress, and the smallest weight values. However, Case 1B was much higher in weight than Case 1A but with much less deflection value.
Table 6 shows the parameters and calculation results of the optimum design of the crane girder dimensions with minimum stress concept, which was Case 1C; another two cases were shown for comparison (Case 2C, and Case 3C). The results of the all 280 case studies didn’t exceed the allowable stresses. Case 1C had the smallest deflection and the smallest stress values, but the weight value was the highest among the cases Case 1C, Case 2C, and Case 3C. However, Case 1C is much higher in weight than Case 1A; also Case 1C had a stress value greater than Case 1B.
Hence, for minimum weight and minimum cost Case 1A was the optimum. However, for minimum deflection and minimum stress Case 1B was the optimum but with much higher weight than Case 1A.
Design Optimization Using Decision Matrix Technique
After calculations were done to the 280 crane case studies, three concepts were applied for optimization: minimum weight, minimum deflection, and minimum stress. The selected criteria to be used by decision matrix to obtain the optimum crane design in all concepts were bending stress, shear stress, girders weight, and deflection. The four criteria were given a weight factor based on the desired values and preferences according to the optimization concept, as shown in Table 7.
The weight factor values used in Table 7 related to minimum weight concept were assumed giving a large percentage to the girder weight of 74% to reduce the girder weight as possible with acceptable stress and deflection values, while the values related to minimum deflection concept were assumed giving a large percentage to the deflection criterion to get the minimum possible deflection with acceptable weight and stress values. However, the weight factor values related to minimum stress concept were assumed giving a large percentage to the stress criteria (shear stress and bending stress) to get the minimum possible stress with acceptable weight and deflection values.
The sum of weight factors should be 100. The weight factor was multiplied by the criterion rate to get the score of each criterion. Then the total score was computed for the same crane case study by summing the score of all criteria. At last the total score of the 280 crane case studies was in hand. The case study with the minimum total score represented the optimum design case in each concept.
The results of design optimization using decision matrix were mentioned in the following:
The optimum crane design with minimum weight concept after applying the weighted decision matrix is shown in Table 8, which was Case 1A that had the minimum total score. Another two cases were shown for comparison (Case 2A, and Case 3A).
The optimum crane design with minimum deflection concept after applying the weighted decision matrix is shown in Table 9, which was Case 1B that had the minimum total score. Another two cases were shown for comparison (Case 2B, and Case 3B).
The optimum crane design with minimum stress concept after applying the weighted decision matrix is shown in Table 10, which was Case 1C that had the minimum total score. Another two cases were shown for comparison (Case 2C, and Case 3C).
Design Verification Using Finite Element Analysis
The optimum crane design related to each concept was modeled as a solid. Solid modeling of DGOC had been done as per above technical specifications. The solid model is shown in Fig. 13. For getting the results from stress analysis, the following tasks were performed, first the material for each part of the box girders was assigned, St37 material had been selected, the safety factor as the yield strength was set, and the maximum permissible yield strength value had been set to 154 N/mm2. The maximum allowable deflection was found 31 mm (Span/750) as per Indian standard IS-807:2006 [32]. After that, the boundary conditions had been set as fixed constraint. Contact conditions of the box girder were set to bonded (welded). Two remote loads of 56 KN had been applied on the top flange of the girder, and the gravity force had been applied as well. Later, a mesh was created. A four-node tetrahedral element was used for FEA, the number of nodes created were 97 and the elements were 95. In this study, 3D beam type element was used.

Loads and boundary conditions on crane girder
Results of design verification using FEA were mentioned in the following:
Applying the minimum weight concept, results from a 3D girder model with 3D beam element using the girder solid model generated by means of solid works software package were: the maximum bending moment was occurring at the mid-span of the girder. The maximum bending stress of the complete box girder was 90.3 N/mm2 as shown in Fig. 14. The displacement (deflection) of the modeled overhead crane girder was obtained from FEA, and it was occurring at the mid-span of the girder, as illustrated in Fig. 15. The value of maximum displacement of the girder was about 39.6 mm. The maximum shear stress of the girder was 6.2 N/mm2 as shown in Fig. 16. Safety factor values are shown in Fig. 17. Moment plot in y and z directions is shown in Figs. 18 and 19, and shear force in y directions is shown in Fig. 20. Table 11 presents a comparison between allowable values of the selected criteria as per ECP for steel and ISR: 807, FEA results, calculations results, and the error ratio. Maximum error ratio was 12%.

Values of bending stress (Case 1A)

Displacement values (Case 1A)

Shear stress values (Case 1A)

Maximum and minimum values of safety factor (Case 1A)

Moment plot in y direction (Case 1A)

Moment plot in z direction (Case 1A)

Shear force in y direction (Case 1A)
Applying the minimum deflection concept, the maximum bending moment occurred at the mid-span of the girder. The maximum stress of the complete box girder was 65.8 N/mm2, it was depicted in Fig. 21. The displacement of the modeled overhead crane girder was obtained from FEA, and it was occurring at the mid-span of the girder, as illustrated in Fig. 22. The value of maximum displacement of the girder was about 25.1 mm. The maximum shear stress of the girder was 4.5 N/mm2 as in Fig. 23. Moment plot in y and z directions is shown in Figs. 24 and 25, and shear force in y directions is shown in Fig. 26. Table 12 presents a comparison between allowable values of the selected criteria as per ECP for steel and IS: 807, FEA results, calculations results, and the error ratio. Maximum error ratio was 36%.

Maximum and minimum values of bending stress (Case 1B)

Maximum displacement value (Case 1B)

Maximum values of shear stress (Case 1B)

Moment plot in y directions (Case 1B)

Moment plot in z directions (Case 1B)

Shear force plot in y direction (Case 1B)
Applying the minimum stress concept, the maximum bending moment occurred at the mid-span of the girder. The maximum stress of the complete box girder was 78.9 N/mm2; it is depicted in Fig. 27. The displacement of the modeled overhead crane girder was obtained from FEA, and it is occurring at the mid-span of the girder, as illustrated in Fig. 28. The value of maximum displacement of the girder was about 35 mm. The maximum shear stress of the girder was 5 N/mm2 as in Fig. 29. Moment plot in y and z directions is shown in Figs. 30 and 31, and shear force in y directions is shown in Fig. 32. Table 13 presents a comparison between allowable values of the selected criteria as per ECP for steel and ISR: 807, FEA results, calculations results, and the error ratio. Maximum error ratio was 37%.

Maximum and minimum values of bending stress (Case 1C)

Maximum displacement value (Case 1C)

Maximum values of shear stress (Case 1C)

Moment plot in y direction (Case 1C)

Moment plot in z direction (Case 1C)

Shear force plot in y directions (Case 1C)
The safety factor was higher than its value in ECP for steel for all concepts of optimization, maximum bending stress and maximum shear stress were much smaller than the allowable parameters values. Though, the deflection value was smaller than the allowable value in case of the minimum deflection concept only, but by making a camber a substantial decrease in deflection values was realized.
Even though there was large difference between analytical calculation of maximum displacement and FEA, stress results are matching 10% or less in Tables 12 and 13. By referring to the values of the applied bending and shear stress in the cases Case 1A, Case 1 B, and Case 1 C (in Tables 11, 12, and 13), it was found that the highest value was in Case 1A which led to the highest deflection value; hence the error between the FEA results and the theoretical calculations results without a camber was much less than the other two cases (Case1B and Case1C). On the other hand, the values of bending and shear stress in Case1B and Case1C were less than Case 1A, then the resultant deflection is small without a camber and the error was larger in these two cases. Further, analytical calculations gave a maximum displacement value that was acceptable and less than the allowable value, especially after using a camber. While FEA gave a maximum displacement value that was acceptable and less than (as in Table 12) or slightly greater than (as in Table 13) the allowable value.
In FEA all the available variables were taken into consideration while simulation, in a trial to reach the real crane case. While in analytical calculations the mathematics were simplified. In addition, according to the strength of materials the stress in a body is assumed to be concentrated, but in reality it is distributed. Also, the accuracy of FEA increases with the increase of element number in the mesh.
DGOC Manufacturing and Testing
The results of this work and the optimized crane case study related to minimum weight concept (Case 1A) had been manufactured in Elmarakby steel company. The sequence of manufacturing operations were surface cleaning, cutting and machining, punching and drilling, straightening, fitting and reaming, fastening (welding), and finishing. The resulted crane seemed to be encouraging as the optimized girders were lighter than the other cranes of the same capacity manufactured before or supplied in the prevailing market.
The crane was weighed through a truck scale, and the crane weight matched 105% of the theoretical weight because of welded parts (The truck scale is a scale on which the truck stands, and the scale is connected to a computer room that calculates the weight). Before usage, the operational test and the rated load test were performed based on OSHA [34]. Where all crane motions were tested under loads of 100%, and 125% of the rated capacity for each hoist, trolley on the crane, and crane runway girder. All limit-switches, and brakes of the crane were tested at 100% and 125% of the rated capacity. Fabrication and erection of DGOC 10 ton are shown in Fig. 33a–c, and testing is shown in Fig. 34a.

a, b Fabrication and erection of DGOC 10 ton, c DGOC was put in place

a, b Testing of DGOC 10 ton
Conclusions and Future work
The DGOC structural design optimization had been performed by using weighted decision matrix technique, comparison among results of different crane case studies was held, so optimum design of minimum weight, minimum deflection, and minimum stress concepts was obtained. Then, a comparison between the analytical calculations followed by weighted decision matrix optimization results, and the FEA results was investigated and the results were almost similar. Hence, for minimum weight and minimum cost Case 1A was the optimum. On the other hand, for minimum deflection and minimum stress Case 1B was the optimum but with much higher weight than Case 1A.
By comparing the allowable parameters of ECP for steel, the results of weighted decision matrix and the results of FEA, it was inferred that the safety factor was higher than the one in ECP for steel, the maximum error ratio was 12%, and it was obtained by applying minimum weight concept; both maximum bending stress and maximum shear stress were much smaller than the allowable parameters value in all optimization concepts. However, the deflection value exceeded the allowable value except for the minimum deflection concept, but by using a camber a significant decrease in deflection values was achieved. Therefore, weighted decision matrix can be considered a promising optimization technique.
The crane design was also verified by manufacturing and testing a real crane (Case 1A). Operational and rated load tests were applied to the crane.
In future work, the motion dynamics of the crane will be taken into consideration, and an advanced control technique will be selected to control the crane dynamics keeping crane deflection as minimum as possible. Real values of deflection and stress will be measured and compared to the theoretical and simulation values.
References
J. I. Lerga, Modelling and simulation: Research on the metal structure of bridge cranes. Master thesis, Faculty of Engineering, Technical University – Sofia, 2011
L.J. Fogel, A.J. Owens, M.J. Walsh, Artificial Intelligence Through Simulated Evolution, 1st edn. (Wiley, Hoboken, NJ, 1966)
I. Rechenberg, Evolutionsstrategie – Optimierung technischer Systeme nach Prinzipien der biologischen Evolution, 1st edn. (Frommann-Holzboog, Stuttgart, 1973)
D.E. Goldberg, Genetic Algorithms in Search Optimization and Machine Learning, 13th edn. (Addison Wesley Longman Publishing Co., Boston, MA, 1989)
J. Kennedy, R. Ebrahart, Particle swarm optimization, in IEEE International Conference on Neural Networks (Perth, Australia), IEEE Service Centre, Piscataway, NJ, IV, pp. 1942–1948, 1995
R.M. Storn, K.V. Price, Differential evolution—a simple and efficient heuristic for global optimization over continuous spaces. J. Glob. Optim. 11, 341–359 (1997)
Z.W. Geem, J.H. Kim, G.V. Loganathan, A new heuristic optimization algorithm: harmony search. Simulation 76, 60–68 (2001)
S. Pugh, Concept selection: a method that works, in Review of Design Methodology, in Proceedings International Conference on Engineering Design, March 1981, Rome, ed. by V. Hubka (Heurista, Zürich, 1981), pp. 497–506
E. Topics, Decision-matrix method - Wikipedia, 2018. https://en.wikipedia.org/wiki/Decision-matrix_method. Accessed 26 June 2020
C. Seeßelberg, About the cross-section optimization of welded profiles of run-way beams for top mounted overhead cranes. Stahlbau 72(9), 636–645 (2003)
C. Alkin, C.E. Imrak, H. Kocabas, Solid modeling and finite element analysis of an overhead crane bridge. Acta Polytech. 45(3), 61–67 (2005)
R. H. Zuberi, L. Kai, P. Z. Zhengxing, Design optimization of EOT crane bridge, in EngOpt 2008 - International Conference on Engineering Optimization, vol. 3, June, pp. 1–5, 2008
G. Kastratovic, R. Mijailovic, Cross-section optimization of tower crane lattice boom. Meccanica 44(5), 599–611 (2009)
C.B. Pinca, G.O. Tirian, A.N.A. Josan, Application of finite element method to an overhead crane bridge. WSEAS Trans. Appl. Theor. Mech. 4(2), 64–73 (2009)
Y.-W. Sun, X.-B. Ze, L.-W. Luo, W. Wang, Optimization design and analysis of LD-A type crane crossbeam. J Harbin Inst Technol 17, 94–98 (2010)
M.M. Gašić, M.M. Savković, R. Bulatović, R.S. Petrović, Optimization of a pentagonal cross section of the truck crane boom using Lagrange’s multipliers and differential evolution algorithm. Meccanica 46(4), 845–853 (2011)
A. Suratkar, V. Shukla, K.S. Zakiuddin, Design optimization of overhead EOT crane Box girder using finite element analysis. Int. J. Eng. Res. Technol. 2(7), 720–724 (2013)
T. Yifei, T. Zhaohui, Y. Wei, Y. Zhen, Research on energy-saving optimization design of bridge crane. Eksploatacja i Niezawodność 15(4), 449–457 (2013)
M. Delić, M. Čolić, E. Mešić, N. Pervan, Analytical calculation and FEM analysis main girder double girder bridge crane. TEM J. 6(1), 48–52 (2017). https://doi.org/10.18421/TEM61-07
Z.M. Wang, Y.J. Cai, D.H. Miao, A novel improved genetic algorithm and application in mechanical optimal design. Mater. Sci. Forum 628–629, 263–268 (2009)
N.D. Lagaros, M. Papadrakakis, Applied soft computing for optimum design of structures. Struct. Multidiscip. Optim. 45(6), 787–799 (2012). https://doi.org/10.1007/s00158-011-0741-9
A. Abdul Fattah, B. Shaaban, Mechanical System Design, 1st edn. (Faculty of Engineering, Cairo University, Cairo, 1995)
J.S. Arora, Introduction to Optimum Design, 3rd edn. (Academic Press is an Imprint of Elsevier, Cambridge, MA, 2012)
O.M. Olabanji, K. Mpofu, Comparison of weighted decision matrix, and analytical hierarchy process for CAD design of reconfigurable assembly fixture. Procedia CIRP 23, 264–269 (2014). https://doi.org/10.1016/j.procir.2014.10.088
M. Zeiller, K. Edlinger, A decision matrix for choosing the proper visualization technique in knowledge visualization, in Conference: Proceedings of the Tenth IASTED, International Conference on Computer Graphics and Imaging, Innsbruck, Austria, 13–15 Feb 2008
ScienceDirect Topics, Decision matrix—an overview, 2020. https://www.sciencedirect.com/topics/engineering/decision-matrix. Accessed on 20 June 2020
S. M. C. M. Randligama, S. Jayathilake, K. Wijesundara, Applications of finite element method in structural engineering, in Conference: The 7th International Conference on Sustainable Built Environment, At: Earl’s Regency Hotel, Kandy, Sri Lanka, Volume: 7, Project: Myth and Fallacies in Application of Finite Element Method in Structural Engineering, December, 2016
D.V. Hutton, Fundamentals of Finite Element Analysis, 1st edn. (McGraw Hill, New York, NY, 2004)
O.C. Zienkiewicz, R.L. Taylor, J.Z. Zhu, The Finite Element Method: Its Basis and Fundamentals, 6th edn. (Elsevier, Butterworth-Heinemann, Oxford, 2010)
Z. Bofang, The Finite Element Method: Fundamentals and Applications in Civil, Hydraulic, Mechanical and Aeronautical Engineering, 1st edn. (Wiley, Hoboken, NJ, 2018)
CMAA Specification No. 70, top running bridge and gantry type overhead traveling cranes, 2017. https://kupdf.net/download/cmaa-specification-70_5b0c58d2e2b6f50f77c669cd_pdf
Bureau of Indian Standard, Design, Erection and Testing of Cranes and Hoists Code of Practice as Per IS-807:2006 (Bureau of Indian Standard, Manek Bhawan, 2006)
Egyptian Code of Practice for Steel Construction and Bridges, Allowable Stress Design, and Permanent Committee for the Code of Practice for Steel Construction and Bridges, 1st edn., 2001, Arab Republic of Egypt Ministry of Housing Utilities and Urban. https://www.academia.edu/28092267/
OSHA 1910.179(K), Overhead and Gantry Cranes: Testing, Crane Institute of America Inc., 2014
Acknowledgement
The authors are very grateful to Elmarakby steel company for supporting this work.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Authors have no conflicts of interest to declare.
Code availability
Custom code is made.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Mohamed, H.S., Abdelwahab, S.A. Double-Girder Overhead Crane Optimum Design Using Weighted Decision Matrix and Finite Element Analysis. J. Inst. Eng. India Ser. C 102, 283–304 (2021). https://doi.org/10.1007/s40032-020-00652-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40032-020-00652-w