
Abstract
Designing the suspension system of a tracked combat vehicle (CV) is really challenging as it has to satisfy conflicting requirements of good ride comfort, vehicle handling and stability characteristics. Many studies in this field have been reported in literature and it has been found that torsion bars satisfy the designer’s conflicting requirements of good ride and handling and thus have reserved a place for themselves as the most widely used suspension system for military track vehicles. Therefore, it is imperative to evaluate the effectiveness of the torsion bar under dynamic conditions of undulating terrain and validating the same by correlating it with computer simulation results. Thus in the present work, the dynamic simulation of a 2N + 4 degrees of freedom (DOF) mathematical model has been carried out using MATLAB Simulink and the vibration levels were also measured experimentally on a 12 wheel stationed high mobility military tracked infantry combat vehicle (ICV BMP-II) traversing different terrain, that is, Aberdeen proving ground (APG) and Sinusoidal, at a constant vehicle speed. The dynamic force transmitted to the hull CG through the 12 torsion bar suspension systems was computed to be around 26,700 N and found to match the measured values. The vibration isolation of the torsion bar in bounce was found to be effective, with a transmissibility from the road wheel to the hull of about 0.6.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Military tracked combat vehicles (CVs) are designed to sustain severe vibration as operational requirements necessitate their exploitation in ride over rough terrain. The dynamic response of a CV during a cross-country run, which is a random terrain input, has been of major design concern to automotive engineers for many years. This concern arises from the fact that excessive levels of vibrations can lead to ride discomfort, ride safety problems as well as dynamic stressing in vehicle frame and suspension components. To overcome these problems, designing a suspension system becomes critical in improving ride comfort and safety. Thus, the suspension system is designed with the objective of reducing the vibration to the personnel and load being borne by the vehicle, the advantage being reduced driver fatigue and reduced harm to the vehicle. The suspension keeps the wheel in contact with the ground; the higher the deflection, the greater the force that the spring applies according to its stiffness. The stiffer the spring, the harsher the ride and less comfortable passengers are, but better the handling capabilities. Therefore, suspension design is a constant tradeoff between handling and ride comfort. Many studies in this field were carried out and it was found that torsion bars satisfy these conflicting requirements and are the most widely used suspension system for military track vehicles.
Hohl [1] delineated the features of torsion-bar spring and damping systems, which are widely used in military tracked vehicle suspension system. Rakheja et al. [2] proposed a tank model considering the suspension system, track-terrain interactions, track tension and stiffness of the track pad to study ride characteristics of a military tracked vehicle fitted with torsion bar suspension system. The military tracked vehicle model had a trailing arm torsion bar suspension system; analysis of ride characteristics was done using a nonlinear vehicle model. The ride quality analysis of the said vehicle was carried out by finding average absorbed power. Dhir and Sankar [3] have carried computer simulation and field trials on ride dynamics of high mobility wheeled/tracked off-road vehicles considering the track tension, terrain undulations and stiffness of the track pad while traversing rough off road terrain. Dhir and Sankar [4] developed an in-plane ride model to compare the ride performance of a torsion bar suspension system with a hydrogas suspension system. Sujatha et al. [5] developed a half car model (N + 2) of a tracked vehicle and analyzed the same considering the bounce and pitch motions of the sprung mass and vertical motion of each road wheel as a degree of freedom (DOF). Yamakawa and Watanabe [6] did a spatial motion analysis of a tracked vehicle with independent torsion bar type suspension in order to numerically simulate the motion of the vehicle including the road wheels. The said model reasonably predicted the motion of the tracked vehicle with torsion bar type suspension and the same was established by comparing numerical analysis with experiments on a scaled model. Baokun [7] developed a multibody dynamics model of a tracked vehicle fitted with torsion bar suspension system to study ride comfort and safety. Kadir et al. [8] developed a 2 DOF tracked vehicle model using MATLAB Simulink and studied the vertical motions of the sprung and unsprung masses to a known road input. They also compared the results with experiments on the model.
Objectives of the Present Work
Analytical studies with emphasis on transmissibility of the torsion bar suspension in bounce and determination of road loads have not been reported in literature. Hence in the present work, dynamic analysis of a high mobility tracked vehicle was carried out with the following objectives:
-
1.
To conduct studies on a CV with torsion bar suspension system by performing dynamic tests on the vehicle on defined tracks: (a) Sinusoidal and (b) Aberdeen proving ground (APG) at constant speed and to study the same analytically using 2N + 4 DOF CV model in MATLAB Simulink.
-
2.
To estimate the road loads transferred to the hull through the road wheels through experiment and analysis.
-
3.
To determine the vibration transmissibility characteristics of the torsion bar in bounce through experiment and analysis.
All experiments and simulation studies have been carried out at a constant vehicle speed of 15 kmph and analyses are done using a linear model. Parameters of the CV (that is, torsion bar stiffness and damping coefficient) used in the model are assumed to be constant.
Eigenvalue Analysis of Tank
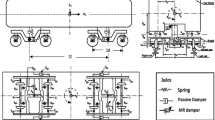
To carry out the dynamic analysis, a 2N + 4 DOF full car mathematical model was developed. In the model, 2N DOF correspond to the bounce motion of the 2N road wheels and 4 DOF correspond to the roll, pitch and bounce motions of the sprung mass CG and driver seat bounce motion. Prior to that the torsion bar stiffness and shock absorber damping characteristics have been computed. The ICV has been fitted with 12 torsion bars. A sketch of the torsion bar is shown in Fig. 1a and locations of dampers are shown in Fig. 1b. Each torsion bar is attached to a wheel at one end, whereas the other end is splined to the hull.

a Schematic of torsion bar b locations of dampers
Wheel Rate of Torsion Bar Stiffness (Ktb)
The procedure for computation of torsion bar stiffness and shock absorber damping used in the analytical model is described here. The torsion bar is a linear spring for twist angles of the order of 40° over the operating range considered. For the computation, the angle between the road wheel arm and the horizontal line is that at the free position of the torsion bar (without the application of any torque). Suspension stiffness is the ratio of the vertical force acting on the road wheel to the corresponding vertical displacement. Though this is found to be slightly non-linear, the suspension stiffness can be taken as constant and equal to its average value [9].
where d = diameter of torsion bar = 0.038 m; G = modulus of rigidity of steel = 84 × 109 N/m2; l = length of torsion bar = 2.075 m; R = length of road wheel arm = 0.325 m and \(\Phi\) = angle between road wheel arm and horizontal line = 30° as seen from Fig. 1a.
On calculating, torsion bar stiffness, Ktb is found to be 75,530 N/m.
Estimation of Shock Absorber Damping Characteristics (Cd)
The ICV BMP-II has been fitted with three dampers each, on both sides of the vehicle, that is, at wheel sets 1, 2 and 6. Wheel rate of damping
where damping coefficient Cc = 70,000 Ns/m and α = angle between shock absorber axis and road wheel arm. The damping characteristics of three wheel stations 1, 2 and 6 for 40 mm stroke are as shown in Table 1.
Eigenvalue Problem
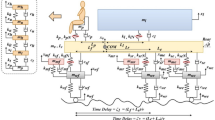
To carry out dynamics analysis, a 2N + 4 DOF full car mathematical model was developed. Figure 2 shows the coordinates associated with CV. In the model, 4 DOF correspond to the roll (\({\upvarphi }\)), the pitch (θ), the bounce (Zh) motion of the sprung mass CG and driver seat bounce (Zseat) motion, while 2N DOF correspond to bounce motion of road wheels as shown in Fig. 2.

2N + 4 full car model of ICV BMP-II
The general equations of motion for eigenvalue analysis can be given as
This equation can be rewritten in the form of a non-standard eigenvalue problem:
where [M] is the mass matrix; [C] is the damping matrix (which is neglected while obtaining eigenvalues) and [K] is the stiffness matrix; \(\left\{ {\text z} \right\}\) is the displacement vector.
The generalized equation for hull bounce, hull pitch and hull roll at CG are as given here.
The generalized equation for individual wheel bounce is as given here.
where Tri and Zri stand for track tension and road input for the ith wheel.
The eigenvalue analysis has been performed using MATLAB. Parameters used for the analysis are shown in Tables 2 and 3. Estimated natural frequencies are shown in Table 4.
Experimental Trials on Sinusoidal and APG Tracks
Extensive experimental trials were carried out to estimate the road loads transferred by the torsion bars and their transmissibility in bounce.
Static Test
In order to understand the road loads transferred to the hull, it has been assumed that the strains measured near the torsion bar anchors are indicative of the road loads transferred. Therefore a static loading and unloading test was carried out to measure the strain corresponding to the load on a wheel station. Strain gauges FCA-6-11 (TML, Japan) were pasted near the wheel station as shown in Fig. 3a in half bridge configuration with one active gauge and a dummy gauge and the signals were conditioned and acquired using Quantum X data acquisition system (HBM, Germany). To obtain the load values from the strain gauge readings, the CV was lifted up slowly from the ground using an overhead crane such that the entire weight of the CV was carried by the crane as shown in Fig. 3b and then fully lowered to the ground, with the strains being recorded for both cases.

a Straingauge b CV lifted by overhead crane to calibrate strain c measuring load on a weigh bridge
Dynamic vertical load acting on each wheel station was also measured by using a weighbridge (Fig. 3c). Measurements were made in such a manner that only the first set of wheel stations was on the weighbridge and the remaining wheels were on the ground and the corresponding load was recorded. Then the 2nd wheel station set was moved on to the weighbridge and the combined load of 1st and 2nd wheel stations was recorded. The value for the 2nd wheel set could be calculated by subtracting the value corresponding to the 1st wheel set from the second reading. Similarly the load distribution on the other wheel station sets was measured sequentially. Table 5 shows the measured strain values at wheel station 4 and Table 6 the load carried by each wheel station. Tables 5 and 6 indicate that the 4th wheel station alone carries 14,028 N load of the CV and this corresponds to 48.32 μm/m strain.
Experimental Setup for Dynamic Measurements
Dynamic trials were carried out at a constant speed of 15 kmph to measure the response of the tank near the six wheel stations and on the sprung mass (hull plus turret) CG in the vertical direction. Acceleration responses were measured on the two tracks (a) Sinusoidal track and (b) APG track, as shown in Fig. 4a, b. Sinusoidal track with pitch 7 m and peak amplitude 0.1 m is made of concrete. The APG track consists of bumps of different heights arranged in a random manner. Details regarding these test tracks are shown in the “Appendix”. MEMS accelerometers SAA-1150-1000 (NeuwGhent Technology, USA) were used for vertical acceleration response measurement near all the wheel stations and the driver’s seat. Since the accelerometers could not be attached directly to the wheels, they were mounted near the wheel stations at the locations where the wheel arms are rigidly fastened to the hull of the vehicle as shown in Fig. 4c. Six DOF accelerometers / rate gyros TANS-3115010M5-25100 (NeuwGhent Technology, USA) were fixed at the hull CG. DEWE 501-Dewetron logger was used for data acquisition. The power required for measurements was obtained through a 12 V battery and inverter.

a Sinusoidal track b APG track c MEMS accelerometers
Dynamic Forces Transmitted to Hull CG
Strain values measured near the 4th wheel station on the Sinusoidal track are shown in Fig. 5a. These dynamic strains were then calibrated as per the data mentioned in Table 6 to get the dynamic load acting on the vehicle under running condition and the corresponding calibrated loads are shown in Fig. 5b. From Tables 5 and 6, it is seen that the 4th wheel station carries 14,028 N load of the CV and this corresponds to 48.32 μm/m strain. From Fig. 5a, the peak strain value is 92 μm/m. Therefore, force FT transmitted to the hull = (14,028 / 48.32) × 92 = 26,708.94 N. In Fig. 5b, the load is shown by converting the strain using the above calibration factor; the peak force transmitted is 26,708.94 N.

a Time record of strain value measured near 4th wheel station on Sinusoidal track. b Dynamic vertical load acting on 4th wheel station on Sinusoidal track. c Time record of strain value measured near 4th wheel station on APG track. d Dynamic vertical load acting on 4th wheel station on APG track
In order to compute the dynamic forces acting at the hull CG and validate the above measured values, the basic equation for peak force transmitted from the 12 road wheels is
where \(\upomega = 2\uppi {\text{f}} = 3.7385\) rad/s; frequency (f) = \({\frac{\text{v}}{\uplambda}} = {\frac{4.1667}{7}} = 0.595\) Hz; wavelength (λ) = 7 m; velocity (v) = 4.1667 m/s and peak amplitude = 0.1 m.
Equation (10) is formulated considering the fact that the CV has 12 torsion bars and six dampers.
Therefore,
This matches well with the value calculated using Eq. (10), that is, 26,708.94 N, as shown in Fig. 5b.
Having validated the road loads for the Sinusoidal terrain, the loads for the APG terrain were calculated. Figure 5c, d shows the measured strain and estimated load for the APG track.
Dynamic Test Results
Vertical acceleration measurements at all the wheel stations, sprung mass CG and driver’s seat were recorded on Sinusoidal and APG tracks. A sample time record of vertical acceleration on the road wheel (Station 2) on Sinusoidal track is as shown in Fig. 6a. The corresponding spectrum is shown in Fig. 6b. Figure 7a, b shows the accelerations at the hull CG while traversing the Sinusoidal track. Figure 8a shows a sample time record of vertical acceleration on the road wheel (Station 2) on APG track and Fig. 8b shows the corresponding power spectral density (PSD). Figure 9a, b shows the accelerations in the time domain and the PSD, respectively, at the hull CG while traversing the APG track. The accelerations are highest at the first wheel station and are higher for traversal on the APG track than the Sinusoidal track.

a Time record of acceleration at wheel station 2 in vertical direction on Sinusoidal track. b Spectrum of acceleration at wheel station 2 in vertical direction on Sinusoidal track

a Time record of acceleration at hull CG in vertical direction on Sinusoidal track. b Spectrum of acceleration at hull CG in vertical direction on Sinusoidal track

a Time record of acceleration at wheel station 2 in vertical direction on APG track. b Spectrum of acceleration at wheel station 2 in vertical direction on APG track

a Time record of acceleration at hull CG in vertical direction on APG track. b PSD of acceleration at hull CG in vertical direction on APG track
Dynamic Simulation using MATLAB-Simulink and Comparison with Experiment
Equations of motion for the 2N + 4 DOF model of ICV BMP-II are incorporated into the SIMULINK application in state space form. The CV parameters as discussed in Tables 2 and 3 have been utilised while modelling a full car model in Simulink.
Simulink Full Car Model
A schematic of the full car model is shown in Fig. 10.

Simulink 2N + 4 DOF model for ICV BMP-II on sinusoidal track
Simulation Results
Vertical acceleration responses in time domain as well as in frequency domain corresponding to all the wheel stations, sprung mass CG and driver’s seat were generated using MATLAB Simulink. A sample time record and spectrum of vertical acceleration on the road wheel (station 2) on Sinusoidal track are as shown in Fig. 11a, b.

a Time record of acceleration at wheel station 2 in vertical direction on a simulated Sinusoidal track. b Spectrum of acceleration at wheel station 2 in vertical direction on a simulated Sinusoidal track
Comparison of Experimental and Analytical Responses
Comparison of responses recorded from analytical studies (red lines) with experimental studies (blue lines) on Sinusoidal track are shown in Fig. 12 for wheel station 2. Figure 13 shows a comparison between experimental and analytical time records of vertical acceleration at wheel station 2 on an APG track. The difference between the measured time histories and calculated wheel accelerations are because the measured values are from the actual system with a very large number of DOF, whereas the computed values are from a 2N + 4 DOF system. The match in the amplitudes at the salient peaks is good, as also the salient frequencies in the spectral plots. Table 7 shows a comparison of experimental and analytical accelerations obtained from the time records at various locations on the Sinusoidal track. Table 8 shows the same in case of roll and pitch rate.

a Time record of acceleration at wheel station 2 in vertical direction on Sinusoidal track. b Spectrum of acceleration at wheel station 2 in vertical direction on Sinusoidal track

Time record of acceleration at wheel station 3 in vertical direction on APG track
Table 9 shows the comparison between experimental and analytical vertical acceleration responses at various locations on the APG track. Table 10 compares the experimental measurements of roll and pitch rates with those obtained from dynamic simulation. The comparison is good in all cases.
Transmissibility
Transmissibility is defined as the ratio of the maximum transmitted amplitude of vibration to the amplitude of the applied road input. Transmissibility helps in understanding the level of vibration isolation taking place between unsprung mass and sprung mass. In this study transmissibility has been studied in two stages: (i) from the wheel to the sprung mass CG and (ii) from the sprung mass CG to the driver’s seat.
Stage I: Transmissibility from Wheel Station to Sprung Mass CG
In the first stage, acceleration response at wheel station 1 and sprung mass (hull) CG from experimental as well as dynamic simulation records are compared, both on Sinusoidal and APG tracks. Figure 14 shows the time record and spectrum of vertical acceleration measured on the Sinusoidal track at hull CG. Figure 15 shows the corresponding results from simulations on the same track at wheel station 1.

a Time record of acceleration at hull CG and wheel station 1 on Sinusoidal track from measurement b Spectrum of acceleration at hull CG and wheel station 1 on Sinusoidal track from measurement

a Time record of acceleration at hull CG and wheel station 1 on Sinusoidal track from simulation. b Spectrum of acceleration at hull CG and wheel station 1 on Sinusoidal track from simulation
There are some high frequencies present in the experimental results in Fig. 14, which are not seen in the simulation. This is due to the imperfections in the physical Sinusoidal track, the troughs of which were covered with mud, giving rise to a spectrum with higher harmonics. Table 11 shows the peak to peak values of vertical acceleration response at hull CG and road wheel station 1 on Sinusoidal and APG tracks; these are further used to find out complete transmissibility from the road wheel to the driver’s seat.
Stage II: Transmissibility from Sprung Mass CG to Driver’s Seat
In the second stage, the study was carried out to measure vertical acceleration response at the sprung mass CG and driver’s seat as shown in Fig. 16 for experiments on Sinusoidal track and Fig. 17 for simulation on the same. The ratio between vertical acceleration at driver’s seat to acceleration at hull CG serves as an indicator of the effectiveness of the driver’s seat cushion. Table 12 shows experimental and analytical peak to peak values of vertical acceleration response at hull CG and driver’s seat on Sinusoidal and APG tracks; these responses were then used to find out total transmissibility.

a Time record of acceleration at hull CG and driver’s seat on Sinusoidal track b Spectrum of acceleration at hull CG and driver seat on Sinusoidal track

a Time record of acceleration at hull CG and driver’s seat on a simulated Sinusoidal track b FFT of acceleration at Hull CG and driver seat on a simulated Sinusoidal track
Conclusions
The dynamic tests suggest that the torsion bar is an effective suspension system and has the ability to isolate most of the low frequency vibrations, the transmissibility from the road wheel to the hull being about 0.6. The same can be concluded from the simulation results. The dynamic force transmitted to the hull CG through the 12 torsion bar suspension systems was computed to be around 26,700 N and validated using measured values, with a very good match.
Abbreviations
- ai :
-
Longitudinal distance of ith road wheel from CG
- bi :
-
Lateral distance of ith road wheel from CG
- \({\text{C}}_{{{\text{di}}}}\) :
-
Damping coefficient for ith wheel
- \({\text{C}}_{{{\text{seat}}}}\) :
-
Damping coefficient for driver’s seat
- \({\text{I}}_{{\text{p}}}\) :
-
Pitch moment of inertia
- \({\text{I}}_{{\text{r}}}\) :
-
Roll moment of inertia
- \({\text{I}}_{{\text{y}}}\) :
-
Half pitch moment of inertia
- \({\text{K}}_{{{\text{seat}}}}\) :
-
Stiffness of driver’s seat
- \({\text{K}}_{{{\text{tbi}}}}\) :
-
Stiffness of ith torsion bar
- \({\text{K}}_{{{\text{wi}}}}\) :
-
Stiffness of ith road wheel
- \({\text{m}}_{{\text{h}}}\) :
-
Half hull sprung mass
- \({\text{M}}_{{\text{h}}}\) :
-
Hull sprung mass
- \({\text{T}}_{{{\text{ri}}}}\) :
-
Track tension
- X:
-
Longitudinal axis
- Y:
-
Lateral axis
- Z:
-
Vertical axis
- \({\ddot{{\text{Z}}}}_{{\text{h}}}\) :
-
Vertical acceleration response of hull
- \(\dot{{\text{Z}}}_{{\text{h}}}\) :
-
Vertical vibration velocity of hull
- \({\text{Z}}_{{\text{h}}}\) :
-
Bounce motion of hull
- \(\ddot{\text{z}}_{\text{wi}}\) :
-
Vertical acceleration response of ith road wheel station
- \(\dot{\text{z}}_{\text{wi}}\) :
-
Vertical velocity of ith road wheel station
- \({\text{z}}_{\text{wi}}\) :
-
Bounce motion of ith road wheel station
- \({\text{z}}_{\text{ri}}\) :
-
Road input to ith road wheel
- θ:
-
Pitch (about Y-axis)
- θ:
-
Pitch of hull CG
- φ:
-
Roll (about X-axis)
- φ:
-
Roll of hull CG
- Φ:
-
Yaw (About Z-axis)
References
G.H. Hohl, Torsion-bar spring and damping systems of tracked vehicles. J. Terrramech. 22(4), 195–203 (1986)
S. Rakheja, M.F.R. Alfanso, S. Sankar, Dynamic analysis of tracked vehicles with trailing arm suspension and assessment of ride vibrations. Int. J. Veh. Des. 13(1), 56–77 (1992)
A. Dhir, S. Sankar, Analytical track models for ride dynamic simulation of tracked vehicles. J. Terrramech. 31(2), 107–138 (1994)
A. Dhir, S. Sankar, Assessment of tracked vehicle suspension system using a validated computer simulation model. J. Terrramech. 32(3), 127–149 (1995)
C. Sujatha, A.K. Goswami, J. Roopchand, Vibration and ride comfort studies on tracked vehicle. Int. J. Veh. Des. 9(3), 241–252 (2002)
J. Yamakawa, K. Watanabe, A spatial motion analysis model of tracked vehicles with torsion bar type suspension. J. Terramech. 41(2), 113–126 (2004)
H. Baokun, Multibody model and simulation of the tracked vehicles, in Proceedings of International Conference on Computer, Mechatronics, Control and Electronic Engineering (CMCE), pp. 200–202
Z.A. Kadir, M.A.M. Naiem, B. Bohari, K.A. Jalil, M.F.M. Yusoff, Validation of 2 dof tracked vehicle model due to road disturbance. J. Mech. Eng. 1(3), 15–18 (2012)
A.M. Salem, T. Salahuddien, Evaluation of characteristics of tracked vehicle torsion bars. http://www.academia.edu/8651499/Evaluation_of_Characteristics_of_Tracked_Vehicles_Torsion_Bars3
Acknowledgements
The authors acknowledge the support received from Ordnance Factory, Medak and Combat Vehicles Research and Development Establishment, Chennai, India for conducting the experiments and would like to thank them. Further, necessary funding for the study was provided by IIT Madras.
Funding
Funding was provided by IIT Madras.
Author information
Authors and Affiliations
Corresponding author
Appendix: Specifications of Sinusoidal and APG Track Profile
Appendix: Specifications of Sinusoidal and APG Track Profile
Sinusoidal Track Profile

APG Track Bumps

APG Track Profile

Rights and permissions
About this article

Cite this article
Gagneza, G.P.S., Chandramohan, S. Estimation of Road Loads and Vibration Transmissibility of Torsion Bar Suspension System in a Tracked Vehicle. J. Inst. Eng. India Ser. C 100, 747–761 (2019). https://doi.org/10.1007/s40032-018-0460-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40032-018-0460-8