
Abstract
The study of “fault rapid detection and resolution” in the power network is particularly important in sensitive areas of the network. Today, the use of distributed generation in the distribution network is increasing. In the event of an accident, if the fault location is quickly identified, the recovery of the faulty network is accelerated and the shutdown time is minimized. Since distributed generation networks do not have the traditional methods of fault location, accurate and efficient performance, so in this paper, for the least interrupted power supply, a new method for locating and identifying the faulted part of the distribution system with the presence of distributed generation is studied. The proposed method is based on the impedance matrix of the distribution network which has high speed and accuracy in fault location and also has high accuracy in simulations considering the asymmetry of loads and network. In this paper, simulations are implemented in OpenDSS software under various fault conditions and the results are processed in MATLAB software.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
The continuity of power supply to sensitive centers is of paramount importance. If there is a problem with power stations, transmission, and distribution networks, as well as electricity substations, there is a problem with the continuity of power supply to these centers. And if this network failure is not resolved in the shortest possible time, sensitive centers will lose the necessary performance and will see irreparable damage in the shortest possible time. In this paper, we attempt to provide a practical way to quickly and accurately fault location in the distribution network without the need for network protection devices.
When a fault occurs in the network, the network protection relays, by detecting the fault, issue the necessary commands to the relevant keys and, if necessary, the faulted line is separated from the network. If the fault is persistent, it is important to know the exact faulted line because the known lack of a fault location forces repairers to inspect the full length of the line to find the damaged point. The solution to this problem is to use systems that can accurately estimate the fault location. Fault-finding systems have many tasks that can estimate the probability of a fault location with a low computational error.
One of the most important problems in distribution networks is the identification of the faulted section. Distribution networks can be classified into two types of radial and ring. Radial networks are usually protected by synchronized overcurrent relays, while ring networks are protected by directional overcurrent relays. Due to the high number of branches in the distribution networks, the detection of the fault zone is very complicated.
In recent years, the use of distributed generation sources in distribution networks is one of the important issues for electric engineers. Before the introduction of distributed generation resources into distribution networks, the protection scheme was designed based on overcurrent and directional relays. With the introduction of these distributed generation resources into the distribution networks, the direction of power flow and short-circuit levels of the network has changed, making it difficult to identify the fault zone.
The fault situation in power systems has two aspects: first, to identify and separate the area where the fault occurred, and second, to accurately determine the location of the fault in the faulted area. The first is done by the protection system. The main protections used in a distribution system are fuses, open and close relays, overcurrent relays, voltage relays, and main network protectors. A protection system with a combination of these devices that are in sync with each other has the task of correctly detecting and separating the faulted zone. In a common distribution system, the protection system is designed with the assumption that the system is single source and radial, and the methods of finding fault locations for these distribution systems also include similar assumptions. The distribution system with the distributed generation sources is no longer a single source, so the two-case radial and single source are not available for fault location. Therefore, finding fault situations in distribution systems with distributed generation sources should be reconsidered.
In [1], the author shows that fault currents in protection equipment change when the source of distributed generation enters the system. Also, this paper proposes a protection review optionally at the entry point of each distributed generation source. However, this solution works when the production capacity of the distributed generation resources is low. In [2, 3] the issue of coordination between fuses is discussed. They have observed that for a given fault, fault currents may flow in the fault region in the downstream branches as in the upstream branches. Scenarios with different capacities, numbers, and locations for distributed generation units have been considered by the fuse protection system [3], and it has been found that, in the general case, if the protection layout is unchanged, the only way to maintain coordination is through the arbitrary power is to cut off all the distributed generation concurrently with a fault in the network. This enables the system to return to its normal radial network and maintain synchronization between the protection units. But it does mean that distributed generations are disconnected from the system even for a temporary fault. In [4, 5] a few special cases have been mentioned including the coordination of fuses, auto-recloser, and relays. In [6,7,8,9,10,11,12,13,14], smart meter devices and artificial neural network techniques are used to detect the faulted section and fault location in the distribution network.
The solutions mentioned above are impractical. As mentioned earlier, in the future, power distribution systems will depend on distributed generation units for continuous load supply. Separating all distributed generation units for all temporary faults, especially in the power distribution network, most of which are temporary faults, makes the system unreliable [15, 16]. Also, there is an inadequate protection system for continuity when the distributed generation unit is in existence.
The position-fault methods for the initial distribution feeders with the distributed generation unit are presented [17,18,19]. These methods assume that the radial segments are controlled by relays and power switches. These methods will not be transferred to controlled side segments by fuses. Issues that may fault when in power distribution systems occur with distributed generation units are presented [20, 21], but no clear solutions are provided. In some cases, fault location schemes are presented in such a way that only the distributed generation unit at the end of the branches is connected to the network [22, 23]. This topology is very limited. In [24], a network is presented which is needed for the direction of fault current in different segments as input. In this method, a large number of sensors are needed for fault detection in a small area and the location of the fault has not been accurately investigated. A method based on graph theory is presented in [25].
Generally, each feeder consists of a substation at a voltage level of 20 kV, the main feeder, and side feeders. The conventional structure of a single-source distribution network and several radial feeders all lead to a feeder substation. In this system the loads, phases, and impedances of the lines are unbalanced.
The structure of distribution systems is changing with the introduction of distributed generation systems. Due to the decline in fossil fuels, the need for substantial investment in renewable energy has increased. Therefore, studies on the effect of interconnecting distributed generation sources are of great importance. Distributed generation is defined as the interval of generation a few kilowatts to several megawatts (from low to high) and the type of connection to the substation, the distribution feeder, or the consumption load level. Some of the distributed generation technologies can be photovoltaic, wind turbines, fuel cells, micro-turbines, gas turbines, and internal combustion engines. In recent years, research into micro-grids has increased, and micro-grid can be distribution feeder to a circuit as a stacked load and source of connection. These changes mean that the distribution system is transformed into an unbalanced multi-source system. It is noteworthy that the distribution system in the future is dependent not only on multi-distributed generation for modification of peak load but also for transient load energy supply.
Currently, according to International Standard IEEE 1547, 2003, the use of distributed generation sources is not permitted during a fault, and according to the instructions of small-scale generators, in the event of an island outbreak, all generators distributed within 2 s must be cut off from the circuit. Research is currently underway on the presence of distributed generation generators when the network fault occurs [26].
In the remainder of this paper, the second part of the proposed algorithm and method of locating and identifying the faulted part of the distribution network in the presence of distributed generation will be introduced. In the third section, the simulation results of the proposed method will be presented in the IEEE 37-bus network and finally, conclusions will be presented along with the recommendations.
Proposed Method Algorithm
This section presents a method to obtain the exact location of the fault by assuming distributed generation resources. These resources, like other sources, have an equivalent circuit and can be looked at with the same arrangements as other sources for fault location.
Before presenting the method, it is necessary to note that this method only locates a fault and does not have multiple concurrent detections. Voltage and current values are always measured at the substation and sources output of the distributed generations. These values are important in two respects.
-
Using these values and performing the necessary calculations, the Zbus matrix of the network can be obtained.
-
Obtaining fault current in each of the phases is dependent on measuring these values at the output of all sources.
In short, this method first obtains the impedance matrix of each source using the positive, negative, and zero sequences, and consequently the impedance matrix of the network. Then, using the measured values of the current, it obtains the fault current. Using these values of the current and the impedance matrix of the network, it calculates the amount of voltage change in each of the source feeders and, by defining its functionality and finding its minimum, by changing the assumed part of the fault, obtain that part under fault. Next, to find the exact location between the two fault feeders, they add a new feeder in the near distance and continue this work to zero the function value at one point. Details of this method are presented below along with the calculations.
Calculations Describing the Fault Location Method
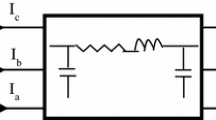
Suppose the voltage and current values are measured momentarily in the source and distribution feeders. Assuming that a fault occurs in the network, the other voltages are not necessarily balanced, thus decomposition in the voltages and currents before and after the fault into positive, negative, and zero sequences. Using these values and the source model in the various sequences of Fig. 1, obtain the impedance of the source different sequences as follows:

Equivalent circuit of positive, negative, and zero sequences
Before the fault, for any source, it is quite obvious that:
The equation that describes the fault condition is:
It is obtained from Eqs. (1) and (2):
In Eq. (3), the changes in voltage and current of the positive sequence are shown by ΔV(1) and ΔI(1), respectively.
Therefore, for different sequences, the corresponding sequence impedances are obtained by the following equations:
Similarly for the negative and zero sequences we have:
Voltage and current values before and after the fault can be measured by measuring devices located at the output terminals of the distributed generation units. These voltages and currents are subdivided into sequence components and are obtained by Eqs. (4), (5), and (6) of the impedance sequence components. We now have positive, negative, and positive impedances. Using these values, the Zabc matrix for each source is obtained as an Eq. (7).
where a is an exponential operator (\(a={e}^{\frac{j2\pi }{3}}\)).
Due to the symmetry between the phases in the transmission and over-distribution networks, the impedance matrix is a dimensioned matrix with some buses. In distribution networks for reasons such as differences in phases length, the existence of only one phase and null or two phases and null and or two phases in a circuit, asymmetric loads in buses and line non-transposition, network becomes asymmetry, and the impedance matrix cannot be liked of symmetric networks are assumed. Now with information on the sources three-phase impedance, the Zbus(abc) impedance matrix of the distribution network can be obtained. Therefore Zbus(abc) can be precisely obtained for asymmetric systems and used for fault location.
Fault Location Method
The purpose of this method is to find the exact location of the fault without considering the protection system. In the proposed method, the digital fault recorders (DFRs) will be located at the source station and the point of contact of each distributed generation unit and will record the voltage and current of all phases. Also, it is assumed that the waveforms obtained from all DFRs as synchronous phasors are available. These assumptions are available with recent technology and work did. The proposed method assumes that the Zbus(abc) distribution system is defined in the same way as presented in Sect. 2.1.
The IF(abc) injector current represents the fault, with and without the fault resistance, where its location can be anywhere in the system. In the first part of this method, it defines the part where the fault is located without dependence on the protection system. Assume that the total number of buses in the system n and the total number of sources in the system (taking into account sub-sources) is m. Sources with the S1, S2, …, Sm and buses are shown with the B(1), B(2), …, B(n). The buses to which these resources are connected are marked with BS(1), BS(2), …, BS(m). Given the asymmetry in the distribution network, each phase of the line is considered a separate line. Therefore, in a three-phase model of the system, Zbus(abc) will be a 3n × 3n matrix and the voltage and current matrices of each bus are 3 × 1 vectors. Manufactured comparisons include two-phase and single-phase lines and phases. In the fault condition, the change in three-phase voltages in a bus I due to a fault in base J is obtained from Eq. (8) in the three-phase system model.
Index (abc) in Eq. (8) and throughout this article illustrates the three-phase relationships of the relevant elements. IF(abc) is the three-phase fault current injected into the J bus. ΔVI-J(abc) is the change in the three-phase voltage values in a bus I due to the injection of IF(abc) current into the J bus. Since it is assumed that synchronous phases of three-phase voltages and currents are available in all sources, the total fault current can be calculated by summing the fault current of all sources. Therefore IF(abc) is apparent in Eq. (8). Also, the use of vector elements IF(abc), the type of fault, and the faulted phase if need be identified.
The fault location algorithm starts with the assumption that the fault is in the B(1) bus. Using Eq. (8), the algorithm for changing the three-phase voltages at all source buses (ΔVBS(J)-B(1)(abc), J = 1, 2, …, m) is computed in the system to fault location assumed. The voltage actual change in the buses BS(1), BS(2), …, BS(m) is obtained from the pre-fault and post-fault voltage measurements. These voltages are indicated by ΔVBS(J)-obs(abc), J = 1, 2, …, m. Then the relation of the fault-index is obtained by using Eq. (9).
The mean of the vector X(1 × k) is:
In Eqs. (9) and (10), ΔVBS(J)-B(1)(abc)—ΔVBS(J)-obs(abc) is 3 × 1. Then the algorithm will expose the fault occurring in B(1), B(2), …, B(n), respectively, and in any case, by using Eq. (9), it will generate faults in the given assumption, i.e., Fault(1), Fault(2), …, Fault(n). To understand this process better, it is assumed that a fault has occurred in the system of Fig. 2. The total fault current can be obtained by summing the three-phase current injections into the BS(1), BS(2), BS(3), BS(4) buses that are identical to the B(1), B(9), B(19), B(23) buses, respectively (For example, according to Fig. 2, the second source bus or BS(2) is the same as B(9)). Using this fault current vector and Eq. (8) and assuming that the fault occurred in B(1), the ΔVBS(1)-B(1)(abc), ΔVBS(2)-B(1)(abc), ΔVBS(3)-B(1)(abc), ΔVBS(4)-B(1)(abc) can be calculated. The observed results of voltage change in source buses are recorded for fault reasons with ΔVBS(1)-obs(abc), ΔVBS(2)-obs(abc), ΔVBS(3)-obs(abc), ΔVBS(4)-obs(abc). The fault-index in this case is:

The distribution network for fault location
In continuation, the algorithm is assumed that the fault in B(2), B(3), …, B(23) buses and, respectively, Fault(2), Fault(3), …, Fault(23) faults are generated.
The impedance matrix definition is used to use the calculated faults in Eq. (9) to determine the fault zone: A Zbus(I, J) element is equal to the voltage ratio produced in node I to the current injected in J node if all the other current injected was zero. Mathematically for a Zbus we have N dimensions:
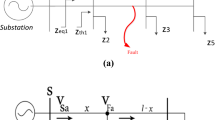
It can be seen from this definition that the generated fault-index, as described in (9), will be the smallest value of the nearest bus to the real fault situation. For example, if the fault occurred in the B(6)–B(7) zone, as shown in Fig. 3, the Fault(6) and Fault(7) fault-indexes would be the smallest, although one could be larger than the one closest to the B(6) or the B(7). Then, the fault zone is defined as the zone between the buses that have the smallest fault values. Figure 4 shows a flowchart specifying the faulted zone by the algorithm.

Equivalent network for faulted system

The faulted zone detection algorithm
Then in the second part, the algorithm identifies the exact location of the fault in the faulted zone, with the same logic as the first part. Figures 5 and 6 schematically illustrate the results of the method, assuming that the B(6)–B(7) zone is under fault. The fault is exactly at the F point, if the fault current is injected into the F the calculated value of the voltage change at source J, (|ΔVBS(J)-F(abc)|) will be the same as the measured voltage change value. Finally, by calculating the IF(abc) fault current and (|ΔVBS(J)-F(abc)|) voltage change, the fault resistance (Rf) can be obtained from Eq. (13).

Fault location algorithm

Finding the fault location between the two feeders detected
It should be noted that B(J) is the number of feeders, BS(J) is the number of feeders to which the sources are connected. S(J) does have some sources connected to them. Zbus is a 3n × 3n matrix obtained in the preceding section, and for each of the voltages and currents, we consider a 3 × 1 matrix which represents the voltage and currents of each line. If a fault occurs in the network, we know that the fault current value is obtained by summing the current changes of all the sources. On the other hand, the amount of voltage change in the bus number i is obtained by the fault in the bus number j according to Eq. (14):
Suppose that a fault occurred in bus 1 using Eq. (14); the values of the voltage change in each of the source feeders are attained. Then, using the measured voltage values and the obtained voltages, we define the following function (according to Eq. 15).
In Eq. 14, the norm value of the function is introduced as the fault of the measured and calculated voltage difference. Calculate the fault value assuming the fault occurs in each section. This fault is minimized to the feeder where the fault occurred. So, using this method, the initial location of the fault is determined between two feeders. Next, to find the exact location of the fault, do the following.
Suppose there is a fault between the B(6) and B(7) feeders. At distance D of feeder 6, add a new bus as shown in Fig. 6. Note that the value of D depends on the accuracy of us. Now, as in the previous step, calculate the fault value for the fault feeders, i.e., B(6), B(7), and the new feeder, and change the new feeder location by changing D and re-calculating the function value. Continue this process until the fault function value is zero.
Modeling the Tested Network
The network bus-37 [27] is shown with three test cases in Fig. 7. The network is connected to the transmission network via bus 799 and the locations of the distributed generation units are assumed in buses 740, 729, and 725. The network loads are asymmetric over the phases and the total network loads are 2457 kW and 1201 kVar, respectively. The network specifications are given in Table 1. It should be noted that in this method, the current and voltage of the network at the common connection point (PCC) DG to the network is measured by the PMU.

37-bus IEEE network
Distribution networks are asymmetric networks. As can be seen, the test network is an asymmetric network in terms of the impedance of the lines as well as unbalanced in terms of the distribution of loads on each phase. This network is modeled on OpenDSS software. In the first step of the OpenDSS software, it is simulated on a test network without any faults, and the result is simulated as the total network impedance matrix and source voltages, and OpenDSS software outputs are provided by MATLAB software via this software link. To test the accuracy of the proposed method, three sources of distributed generation in the network are considered for the simulations in three cases. In the first case, the source of the distributed generation in bus 740 is considered. In the second stage, the distributed generation sources of the 740 and 729 buses are taken into account, and finally, in the third stage, the distributed generation sources are considered based on the 740, 729, and 725 buses. At each stage, different faults (in terms of fault type), with different fault resistances (in the range of 1 to 50 ohms) are exposed in different locations of the network. Fault simulations are performed at each stage by OpenDSS software on the network, and as outputs of this software, fault currents and voltages are recorded in a bus with distributed generation sources and are linked to the MATLAB software by this software. Finally, MATLAB software determines the exact location of the fault using the proposed algorithm program. To illustrate the accuracy of the proposed method, the estimation error percentage is defined as Eq. (16).
Table (2) shows the percentage of error estimation obtained from the simulation of the proposed method. The second column specifies the type of fault. The third column refers to the fault resistance, the amount of series resistance at the short-to-ground (zero potential points), or resistance is the connection between the two phases. The ground resistance is usually below 10 ohms, but in this study, the ohmic resistance value of 50 ohms has also been investigated to demonstrate the accuracy of the method in the worst possible conditions. The estimated location column and its substrates also show the results of the fault location in the following three different cases.
-
The grid has a generating source and a voltage and current meter.
-
Network with two generating sources and two voltage and current meters.
-
Network with three generating sources and three voltage and current meters.
The "Estimated location" column represents the line number obtained from the fault location Algorithm, and each of its three segments represents these results in each case of the network. Given the accuracy of this method and its precise results, these columns appear to be duplicate but to compare the algorithm's results in cases adding sources and metrics and showing improved solutions, the insertion of these columns is necessary.
Comparing the results of Table 2 with reference [27, 28], and [29] methods, it can be seen that in the proposed method, with the installation of only three PMU, the error percentage has reached zero, while in methods [27, 28], and [29], although the accuracy of good, this accuracy is achieved with more PMU, which in turn can increase the cost of equipment installation.
Conclusion
There are many studies done today to improve the reliability of sensitive networks. With the advent of distributed generation, the reliability of the network increases, on the other hand, when there is a fault in the distribution network, the presence of distributed generation due to potential disruption in accurate and rapid location using existing methods. In this article, we tried to provide a practical and effective way of solving this problem by expressing the importance of this issue. Experimental methods have been used in this method, and it has been shown that in networks involving distributed generation, the exact location of the fault event can be detected, and, as the distributed generation increases, the accuracy of the proposed method increases.
References
M. Delfanti, D. Falabretti, M. Merlo, Dispersed generation impact on distribution network losses. Electr. Power Syst. Res. 97, 10–18 (2013)
M. Murali, P.S. Kumar, K. Vijetha, Adaptive relaying of radial distribution system with distributed generation. Int. J. Electr. Comput. Eng. 3(3), 2088–8708 (2013)
S.M. Brahma, A.A. Girgis, Distribution system protective device coordination in presence of distributed generation. Int. J. Power Energy. Syst. 24(1), 32–37 (2004)
R.C. Dugan, T.E. Mcdermott, Distributed generation. IEEE Ind. Appl. Mag. 8(2), 19–25 (2002)
“Power system relaying committee, impact of distributed resources on distribution relay protection”; Online Available: http://www.pes-psrc.org/
M. Dashtdar, Fault location in distribution network based on fault current analysis using artificial neural network. Mapta J. Electr. Comput. Eng. (MJECE) 1(2), 18–32 (2018)
M. Dashtdar, R. Dashti and H.R. Shaker. Distribution network fault section identification and fault location using artificial neural network. In 2018 5th International Conference on Electrical and Electronic Engineering (ICEEE) (pp. 273–278). IEEE. (2018)
M. Dashtdar, M. Dashtdar, Fault location in the transmission network using a discrete wavelet transform. Am. J. Electr. Comput. Eng. 3(1), 30–37 (2019)
M. Dashtdar, M. Dashtdar, Voltage and frequency control of islanded micro-grid based on battery and MPPT coordinated control. Mapta J. Electr. Comput. Eng. (MJECE) 2, 1–19 (2020)
M. Dashtdar, M. Dashtdar, Voltage control in distribution networks in presence of distributed generators based on local and coordinated control structures. Sci. Bull. Electr. Eng. Fac. 19(2), 21–27 (2019)
M. Dashtdar, M. Dashtdar, Fault location in distribution network based on phasor measurement units (PMU). Sci. Bull. Electr. Eng. Fac. 19(2), 38–43 (2019)
M. Dashtdar, M. Dashtdar, Detecting the fault section in the distribution network with distributed generators based on optimal placement of smart meters. Sci. Bull. Electr. Eng. Fac. 19(2), 28–34 (2019)
M. Dashtdar, M. Dashtdar, Fault location in the transmission network based on extraction of fault components using wavelet transform. Sci. Bull. Electr. Eng. Fac. 19(2), 1–9 (2019)
M. Dashtdar, M. Esmailbeag, M. Najafi, fault location in the transmission network based on zero-sequence current analysis using discrete wavelet transform and artificial neural network. Am. J. Electr. Comput. Eng. 3, 30 (2019)
M. Dashtdar, M. Dashtdar, Fault location in radial distribution network based on fault current profile and the artificial neural network. Sci. Bull. Electr. Eng. Fac. 20(1), 14–21 (2020)
J.L. Blackburn, T.J. Domin, Protective Relaying: Principles and Applications (CRC Press, Boca Raton, 2014).
Y. Lu, L. Hua, G. Wu, and G. Xu, A study on effect of dispersed generator capacity on power system protection. in 2007 IEEE Power Engineering Society General Meeting (pp. 1–6). IEEE. (2007)
Z. Xiangjun, K.K. Li, W.L. Chan, and S. Sheng, Multi-agents based protection for distributed generation systems. in 2004 IEEE International Conference on Electric Utility Deregulation, Restructuring and Power Technologies. Proceedings (Vol. 1, pp. 393–397). IEEE. (2004)
S.A.M. Javadian, A.M. Nasrabadi, M.R. Haghifam, and J. Rezvantalab, Determining fault's type and accurate location in distribution systems with DG using MLP neural networks. in 2009 International Conference on Clean Electrical Power (pp. 284–289). IEEE. (2009)
T.H.M. El-Fouly, and C. Abbey, On the compatibility of fault location approaches and distributed generation. in 2009 CIGRE/IEEE PES Joint Symposium Integration of Wide-Scale Renewable Resources into the Power Delivery System (pp. 1–5). IEEE. (2009)
M. Tarafdar Hagh, M.M. Hosseini, S. Asgarifar, A novel phase to phase fault location algorithm for distribution network with distributed generation. in CIRED Workshop, Lisbon 2012, Paper 0267 (2012)
Z. Guo-fang, and L. Yu-ping, A fault location algorithm for urban distribution network with DG. in 2008 Third International Conference on Electric Utility Deregulation and Restructuring and Power Technologies (pp. 2615–2619). IEEE. (2008)
Z. Guo-fang, and L. Yu-ping, Development of fault location algorithm for distribution networks with DG. In 2008 IEEE International Conference on Sustainable Energy Technologies (pp. 164–168). IEEE. (2008)
V. Calderaro, A. Piccolo, V. Galdi, and P. Siano, Identifying fault location in distribution systems with high distributed generation penetration. In AFRICON 2009 (pp. 1–6). IEEE. (2009)
M. Dashtdar, M. Dashtdar, Fault location in distribution network based on fault current profile and the artificial neural network. Mapta J. Electr. Comput. Eng. (MJECE) 2(1), 30–41 (2020)
J. McDonald, Adaptive intelligent power systems: active distribution networks. Energy Policy 36(12), 4346–4351 (2008)
S. Alwala, F. Ali and MA. Choudhry, Multi agent system based fault location and isolation in a smart microgrid system." In 2012 IEEE PES Innovative Smart Grid Technologies (ISGT), pp. 1–4. IEEE, (2012)
M.U. Usman, O. Juan, and Md. Omar Faruque, Fault classification and location identification in a smart distribution network using ANN. in 2018 IEEE Power & Energy Society General Meeting (PESGM), pp. 1–6. IEEE, (2018)
M.U. Usman, Md. Omar Faruque, Validation of a PMU-based fault location identification method for smart distribution network with photovoltaics using real-time data. IET Gener. Transm Distrib 12(21), 5824–5833 (2018)
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hosseinimoghadam, S.M.S., Dashtdar, M. & Dashtdar, M. Fault Location in Distribution Networks with the Presence of Distributed Generation Units Based on the Impedance Matrix. J. Inst. Eng. India Ser. B 102, 227–236 (2021). https://doi.org/10.1007/s40031-020-00520-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40031-020-00520-2