
Abstract
Many countries have updated their renewable energy policies, in which considerable attention is drawn towards offshore wind energy. Offshore industry has witnessed many evolved structural platforms, whether they are fixed or floating. As far as the oil and gas industry is concerned, there are various floater schemes currently in practice, such as SPAR, Tension-Leg Platform, and Semi-Submersible. Among these, Triceratops is a new concept which has many structural benefits over existing floating platforms. Several studies have reported their advantages and applications in oil and gas industry. The current study focuses on the feasibility of offshore Triceratops as an alternate floater scheme for Floating Offshore Wind Turbines (FOWTs) in deep waters. The coupled dynamic analysis due to wind-induced motion and hydrodynamics of the platform under waves are examined. Wind loads are modelled using OpenFAST, and the results are coupled in ANSYS Workbench to obtain hydrodynamic diffraction and motion responses. The responses for the two floater schemes, i.e. SPAR and Triceratops-supported FOWT, are compared, and the necessary conclusions are laid to provide insights into the feasibility of using the Offshore Triceratops for supporting FOWT.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Renewable energy resources have been a key attraction for many developing countries due to the scarcity of conventional ones. Through the decades, many plans have been evolved and adopted to fulfil the energy needs from the resources like wind, solar, hydropower, etc. Among all these, the wind energy sector requires large open wind farms with potential wind flow, operating either onshore or offshore. Some ocean-centric countries with large coastal areas have borrowed the offshore technologies to deploy wind farms on the oceans, which may be either fixed or floating type. The floating-type wind turbines need to be supported on the floaters, which can largely counteract the environmental loading acting on them along with the aerodynamic loads induced by the blades of the wind turbine. The floating-type wind turbine, commonly referred as Floating Offshore Wind Turbine (FOWT), is a novel concept that operates offshore and is supported on floating platforms, like the one deployed for oil and gas production.
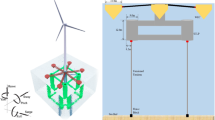
Offshore industry has witnessed many evolved structural platforms, whether they are fixed or floating type. As far as the oil and gas industry is concerned, there are various floater schemes currently in practice, such as SPAR, Tension-Leg Platform (TLP), and Semi-Submersible. The Offshore Triceratops (see Fig. 1) is a new hybrid concept conceived by the researchers in the recent past, which imparts added benefits over other floating platforms like SPAR and TLP, even under harsh marine environments [1,2,3]. The Offshore Triceratops consist of a deck supporting oil and gas production facilities attached to three buoyant legs (BLS) via ball joints, while the BLS in turn are anchored into the seabed using taut moorings. This unique arrangement allows the system to be stiffer in vertical motions, which is attributed to the positively buoyant BLS. The ball and socket joints introduced between the deck and BLS restrain the rotational responses of deck from being transferred to BLS, and vice versa [1,2,3].

Offshore Triceratops supporting Oil and Gas production facilities
Various researchers have studied the feasibility of FOWT supported on different floater schemes like SPAR, Tension-Leg Platform (TLP), Semi-Submersible, etc. Simon Lefebvre and Maurizio Collu [4] carried out preliminary design for the tri-floater scheme in shallow water depths of 40 m and compared the results with other floater concepts; they presented relatively simple and quick methodology for the conceptual and preliminary design stage. Yongsheng Zhao et al. [5] presented preliminary design of a proposed Windstar TLP supporting 5 MW wind turbine in 160 m deep water; they performed time domain aero-hydro-servo-elastic coupled dynamic analysis using open-source code FAST and compared the response statistics with that of MIT/NREL TLP. They found that the proposed Windstar TLP supporting FOWT has better motion characteristics. Jeon [6] numerically examined the dynamic response of SPAR-type FOWT in 200 m water depth with catenary moorings under wave-induced excitation. Mazarako et al. [7] carried out the coupled hydroaeroelastic analysis of TLP supporting 10 MW FOWT in 200 m deep water under combined wind and wave effects and examined the frequency domain responses under different wave incident angles. Zhenqing et al. [8] proposed a novel semi-submersible type FOWT for 200 m water depth with optimized multi-segmented mooring lines and inclined columns in order to reduce the surge and heave responses. Although a lot of research has been carried out on Offshore Triceratops supporting oil and gas production facilities, the feasibility study for supporting a FOWT is not well documented in the literature.
Based on the literature review, the earlier researches on the feasibility of FOWT supported on different floater schemes have only been conducted for shallow water depths [9, 10]. In a quest to harness as much wind energy as possible, the offshore wind energy sector has recently begun to expand into deeper waters. Consequently, the offshore wind energy sector is exploring new geometric forms since the design of FOWT is site-specific and depends on sea state characteristics of the deployment sites. Hence, the objective of the present study is to investigate the feasibility of Offshore Triceratops as an alternative to the different floater schemes available for FOWT. The present study primarily focuses on the conceptual and preliminary design of Offshore Triceratops-supported FOWT in deep waters. The study involves coupled dynamic analysis considering wind-induced motion and hydrodynamics of the platform subjected to the waves. A NREL 5 MW Hywind SPAR-Buoy-supported FOWT in deep waters is considered as benchmark, and the preliminary design for the proportional model using Triceratops-supported FOWT is proposed. The aerodynamic analysis is performed in the open-domain tool OpenFAST, and the wind turbine responses have been coupled with the ANSYS Workbench in order to obtain the hydrodynamic diffraction and motion responses. The responses for the two floater schemes are compared, and the necessary conclusions are laid to provide insights into the feasibility of using the Offshore Triceratops for supporting Floating Offshore Wind Turbines. The novelty of the present study is the proposed conceptual design of Offshore Triceratops-supported FOWT in deep waters and the coupled aero-hydrodynamic analysis with nonlinear mooring system.
Preliminary Design
The preliminary design of a 5 MW FOWT to suit 1000 m deep water under moderate sea state conditions is carried out for two different floater schemes, i.e. SPAR and Triceratops. Based on Scotland’s Hywind offshore wind farm project details [11,12,13], a NREL 5 MW SPAR-Buoy-supported FOWT is considered as benchmark. The preliminary design for the proportional model using Triceratops-supported FOWT is carried out in order to compare the two floater schemes; their geometric details and mass properties are kept equivalent. The geometric details, mass properties, and mooring system considered in this paper are tabulated as Table 1.
The composite mooring system for the two floater schemes comprising of Chain–Cable–Chain arrangement. The cable and mooring line properties considered in this investigation are presented in TABLE 2.
Wind Turbine Specifications
NREL 5 MW baseline wind turbine with 3-blade configuration and 126 m rotor diameter is considered for the present study. The hub diameter and height are 3 m and 90 m, respectively. The wind turbine specifications are tabulated in Table 3.
The meteorological boundary conditions considered in the present study are defined by two types of wind fields: (i) turbulent wind filed and (ii) steady uniform wind field. The turbulent wind field is defined using IEC Kaimal turbulence model with category-B turbulence characteristic and IEC turbulence type specified as Normal Turbulence Model (NTM). The scaling parameters are considered in accordance with IEC 61400-1, Ed. 3: 2005. The IEC Kaimal turbulence model used in this study is as follows:
where f is the cyclic frequency, L is an integral scale parameter dependent on the hub height, u is the mean wind speed at hub height, and \(\sigma = \frac{TI}{100}u\); TI is Turbulence Intensity (%).
The mean wind component is defined using power-law wind profile with a mean velocity of 12 m/s at the reference height of 90 m. The power-law wind profile is given as follows:
where, \(u\left(z\right)\) is the wind speed at height z above ground, \({u}_{ref}\) is the known wind speed at reference height, and α is the power-law exponent, taken as 0.20. The surface roughness length is 0.030 m. The variation of mean wind profile with height is shown in Fig. 2.

Mean Wind Profile
In addition, spatial coherence is defined using IEC u-component coherence model, which is given as follows:
where r is the distance between two points i and j, b is the coherence decrement (taken as 12), and u is the wind speed at hub height, coherence scale parameter, \({L}_{c}={\text{min}}(60, HH)\).
Numerical Modelling
On the basis of the preliminary design, the numerical models of FOWT have been developed in the ANSYS Workbench. Figure 3 shows the methodology followed for the numerical modelling of FOWT. The geometry is first created in ANSYS SpaceClaim, which is then imported to the hydrodynamic diffraction and the hydrodynamic response analysis systems in ANSYS Workbench. The water plane boundary considered in this study is 3000 m along the X direction and 2000 m along the Y direction. The freeboard is kept identical for both the models.

Methodology
SPAR-Buoy-Supported FOWT
The geometry of SPAR-Buoy supported FOWT is created as diffracting elements using surface elements in ANSYS SpaceClaim. For hydrodynamic diffraction analysis, the hull of the SPAR-Buoy supported FOWT is split at the free water surface, which is taken as the origin. In addition to fixed and variable ballast, the mass and inertia properties of all the components of FOWT, such as hull, tower, nacelle, and blades, as shown in Table 1, are assigned at their respective Centre of Gravity. Three connection points are defined at the mid height of the hull to connect the mooring lines to the fixed points defined at the seabed. The hull is moored at the seabed using a nonlinear catenary type composite Chain–Polyester Cable–Chain mooring system with an inclination of 45 degrees. In addition, a power cable is assigned to FOWT. The model is then meshed with 34,492 nodes and 34,218 elements. Figure 4a depicts the numerical model of SPAR-Buoy-supported FOWT.

Numerical Model
Triceratops-Supported FOWT
The geometry of all the components, such as tower, nacelle, and blades, is kept identical to that of SPAR-Buoy supported FOWT, except the hull. The hull for Triceratops-supported FOWT consists of three BLS with 60 m c/c distance, which are considered as Morison elements. They are modelled as beam elements with cylindrical tubes as section profiles in ANSYS SpaceClaim. The mass and inertia properties of all the components of FOWT, except the hull, are kept identical. The mass and inertia properties of the hull, as shown in Table 1, are assigned to each of the three BLS. A triangular deck with sides 80 m is used to mount the wind turbine on top of it. The deck is considered to be a part of the wind turbine tower for comparison. The deck and BLS are connected by using ball and socket type joints. The Triceratops BLS are tethered to the seabed using tensioned tendons consisting of a nonlinear composite Chain–Polyester Cable–Chain arrangement. In addition, a power cable is also attached to FOWT. This model is meshed with 33,706 nodes and 33,423 elements. Figure 4b shows the numerical model of Triceratops-supported FOWT. The analysis settings for both FOWTs are kept same.
OpenFAST, an open-source tool developed by NREL, is employed for the aerodynamic analysis of wind turbine. Figure 5 shows the wind velocity time history for 300 s obtained from the aerodynamic analysis. In Fig. 4, the U-component is the downwind component of the wind velocity directed along x-axis, the V-component is the cross-wind component of the wind velocity directed along y-axis, and the W-component is the vertical component of the wind velocity directed along z-axis. Wind loading on the wind turbine at each time step, as obtained from OpenFAST, is then coupled into hydrodynamic response analysis system of ANSYS Workbench in order to take into account the aero-hydrodynamic effects. Figure 6 shows the force time history induced in all active degrees of freedom at hub location, which is assigned as the time-varying structure force in ANSYS hydrodynamic time response analysis.

Wind Velocity time history

Structure Force time histories
The moderate sea state condition used in the current study is described by the Gulf of Mexico (GoM) 10-year return period storm [14]. The irregular wave is defined by JONSWAP spectrum with wave spreading factor, and a Gamma value of 2.0. The significant wave height and peak wave period are 10 m and 13 s, respectively. The hydrodynamic time response analysis is performed for 300 s with a time step of 0.1 s.
Results and Discussion
The hydrostatic results based on the hydrodynamic diffraction analysis are shown in Table 4. The hydrostatic results for the SPAR-Buoy-supported FOWT and Triceratops-supported FOWT are closely matching and confirm with the preliminary design. Triceratops-supported FOWT has comparatively larger metacentric height which implies greater initial stability against overturning. Triceratops-supported FOWT offers about 50% higher restoring moments for given displaced volume.
The time-domain statistics, as obtained from the hydrodynamics time response analysis, are presented in Table 5. As can be seen, there is comparatively a reduction of about 50% in maximum surge and sway responses for Triceratops-supported FOWT. The shift in the mean value for surge and sway responses is more predominant in case of Triceratops-supported FOWT which shows that the platform oscillates about new equilibrium position. Triceratops-supported FOWT has negligible upward heave, unlike SPAR-Buoy-supported FOWT, which is about 4.2 m. However, more set down is seen in case of Triceratops-supported FOWT, which is attributed to the coupling between surge or sway and heave degrees of freedom due to the Taut-mooring system. The roll as well as pitch responses of Triceratops-supported FOWT are only about 15% that of SPAR-Buoy-supported FOWT. This ensures that the deck of Triceratops-supported FOWT remains horizontal. The yaw responses are minimal for Triceratops-supported FOWT. The rotational responses are significantly reduced, which is attributed to the presence of the ball joint. The ball and socket joint introduced in between the deck and BLS of Triceratops-supported FOWT restrain the rotational responses being transferred from BLS to wind turbine, and vice versa.
The response time histories of the FOWTs are transformed into frequency domain in order to identify the peaks and corresponding frequencies. Figure 7 shows the responses of FOWTs in frequency domain. It can be observed from the figure that there is a substantial reduction in peaks for the Triceratops-supported FOWT as compared to that of SPAR-Buoy-supported FOWT. The natural period and damping ratio in all active degrees of freedom of FOWTs are presented in Table 6. It can be seen from the table that the natural period and damping ratio in soft degrees of freedom such as surge, sway, and heave have substantially increased for Triceratops-supported FOWT without much compensation in stiff degrees of freedom. Figure 8 depicts the variation of tension forces in the cables for both the FOWTs. The time domain statistics for cable tension are presented in Table 7. The cable tension variation shows significant reduction in cable forces for Triceratops-supported FOWT in comparison with the SPAR-Buoy-supported FOWT. The mean cable tension in Triceratops-supported FOWT is about 1/3 that of SPAR-Buoy-supported FOWT. Furthermore, the cables do not slack and always remain in tension, ensuring the positive buoyant nature of the FOWT.

Frequency Domain Responses

Tension Variations in Cables
Conclusions
SPAR and Triceratops-supported FOWT have been numerically modelled in ANSYS Workbench to see the feasibility of Triceratops-supported FOWT in the wind energy sector. The time domain hydrodynamic response analysis, coupled with aerodynamic loads from OpenFAST, is performed for both the cases in 1000 m deep water under moderate sea state conditions.
The conclusions drawn from the study are:
-
1.
Hydrostatic results for SPAR and Triceratops-supported FOWT confirm with the preliminary design.
-
2.
Triceratops-supported FOWT offers better initial stability against overturning as compared to that of SPAR-Buoy-supported FOWT.
-
3.
Triceratops-supported FOWT has comparatively lesser motion responses than SPAR-Buoy-supported FOWT except for Heave response, which can be adjusted by the variable ballast of BLS. In particular, the rotational responses are minimal for Triceratops-supported FOWT.
-
4.
The ball and socket joints introduced in between the deck and BLS of Triceratops-supported FOWT restrain the rotational responses being transferred from BLS to wind turbine, and vice versa.
-
5.
The natural period and damping ratio in soft degrees of freedom for Triceratops-supported FOWT have substantially increased without much compensation in stiff degrees of freedom.
-
6.
Triceratops-supported FOWT shows significant reduction in cable tension without getting slack, ensuring the positive buoyant nature of the FOWT.
The results indicate Triceratops-supported FOWT as suitable alternative for wind farms to be operated in deep waters. This paper only confirms the proof of concept with the illustrated details. Nevertheless, a detailed investigation for aero-hydro-servo-elastic coupled dynamic analysis must be performed in order to further validate the proof of concept.
Abbreviations
- FOWT:
-
Floating Offshore Wind Turbine
- SPAR:
-
Single Point Anchor Reservoir
- TLP:
-
Tension-Leg Platform
- BLS:
-
Buoyant Leg Structures
- FAST:
-
Fatigue, Aerodynamics, Structures and Turbulence
- NREL:
-
National Renewable Energy Limited
- IEC:
-
International Electrotechnical Commission
- NTM:
-
Normal Turbulence Model
- HH:
-
Hub height
- HD:
-
Hub diameter
- TI:
-
Turbulence Intensity
- MW:
-
Mega-Watt
- c/c:
-
Centre to centre
- CoG:
-
Centre of Gravity
- CoB:
-
Centre of Buoyancy
- IXX :
-
Moment of Inertia about X–X Axis
- IYY :
-
Moment of Inertia about Y–Y Axis
- Iz:
-
Moment of Inertia about Z–Z Axis
- MBL:
-
Maximum Breaking Load
- GoM:
-
Gulf of Mexico
- TH:
-
Time history
References
C. Srinivasan, B. Shah, Y.J. Chauhan, Dynamic analyses of triceratops under Hurricane-driven Metocean conditions in Gulf of Mexico. Ocean Eng. (2022). https://doi.org/10.1016/j.oceaneng.2022.111511
C. Srinivasan, B. Shah, Y.J. Chauhan, Fatigue assessment of offshore triceratops restraining system under hurricane-driven metocean conditions. Int. J. Steel Struct. 23, 208–224 (2022). https://doi.org/10.1007/s13296-022-00689-w
C. Srinivasan, B. Shah, Y.J. Chauhan, Tether response of offshore Triceratops under hurricane conditions. Structures 51, 513–527 (2023). https://doi.org/10.1016/j.istruc.2023.03.059
S. Lefebvre, M. Collu, Preliminary design of a floating support structure for a 5 MW offshore wind turbine. Ocean Eng. 40, 15–26 (2012). https://doi.org/10.1016/j.oceaneng.2011.12.009
Y. Zhao, J. Yang, Y. He, Preliminary design of a multi-column TLP foundation for a 5-MW offshore wind turbine. Energies (2012). https://doi.org/10.3390/en5103874
S.H. Jeon, Y.U. Cho, M.W. Seo, J.R. Cho, W.B. Jeong, Dynamic response of floating substructure of spar-type offshore wind turbine with catenary mooring cables. Ocean Eng. 72, 356–364 (2013). https://doi.org/10.1016/j.oceaneng.2013.07.017
T.P. Mazarakos, T.D. Tsaousis, S.A. Mavrakis, I.K. Chatjigeorgiou, Analytical investigation of tension loads acting on a TLP floating wind turbine. J. Mar. Sci. Eng (2022). https://doi.org/10.3390/jmse10030318
Z. Liu, Q. Zhou, Y. Tu, W. Wang, X. Hua, Proposal of a novel semi-submersible floating wind turbine platform composed of inclined columns and multi-segmented mooring lines. Energies (2019). https://doi.org/10.3390/en12091809
S. Chandrasekaran, P. Chinu, Dynamic analysis of offshore triceratops supporting wind turbine: preliminary studies. Maritime Technol Res (2024). https://doi.org/10.33175/mtr.2024.265564
S. Chandrasekaran, K.R.A. Faisal, Wave energy devices: design, development and experimental studies (CRC Press, Florida, 2022), pp.1–271
Statoil Wind Limited (SWL) Hywind Scotland Pilot Park Project EIA Scoping Report, Doc no. A-100142-S00-REPT-001
Equinor, Hywind Scotland Pilot Park Decommissioning Programme, Doc no. GEN-HYS-00004 (2022)
Hywind Scotland Park - Brochure, Statoil (2016)
API 2INT-MET, Derivation of Metocean design and operating conditions, API Standard (2013)
Funding
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors.
Author information
Authors and Affiliations
Contributions
SC and YJC were involved in conceptualization and visualization; SC, YJC, and AG helped in methodology; Formal analysis and investigation were done by YJC and AG; YJC and AG helped in writing—original draft preparation; YJC, SC, GS, and CSS helped in writing—review and editing; Supervision was done by SC and YJC. All authors have read and contributed to the manuscript.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper. There are no conflicts of interest to declare.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Srinivasan, C., Serino, G., Chauhan, Y.J. et al. Feasibility Study of Offshore Triceratops-Supported Floating Offshore Wind Turbine. J. Inst. Eng. India Ser. A 105, 295–305 (2024). https://doi.org/10.1007/s40030-024-00800-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40030-024-00800-w