
Abstract
In emerging countries like India, congestion and delays are acute problems at signalized intersections due to the complex flow pattern of vehicular traffic with varying static and dynamic characteristics. The objective of the present study is to develop delay models for different lane assignments with variable proportions of right-turning vehicles (RTV) (10–50%) and heavy vehicles (HV) (0–12%). Traffic data were collected at five signalized intersections using a videography technique. Models were constructed with the data from four signalized intersections and were validated using data from the fifth intersection. Four-lane assignment models were created using the SIDRA Intersection software. In model-1, the median side lane (lane 1) was exclusively assigned for RTV, whereas in model-2, lane 1 was assigned for through heavy vehicles (THV) and RTV. In model-3, lane 1 was exclusively allotted for RTV, and lane 2 was assigned for through vehicles (TV) and right turn light vehicles. In model-4, both lanes 1 and 2 were assigned for either TV or RTV. Simulation results of all the models showed that the delays increase as the proportion of HV increases. Models 1 and 3 indicated that significant decrease in the delays with rising RTV proportions. In contrast, model 2 revealed negligible variations in the delays with a rise in RTV up to 40%, beyond which the delays followed a rising pattern. Multi-linear regression analysis was used to develop the delay models. When models 2 & 4 were compared to the Indo-HCM model at different volume–capacity (v/c) ratios, the maximum variation was observed at volume–capacity (v/c) ratio ≈ 1, and analogous results were obtained when 0.85 < v/c > 1.15. All the models exhibited a good correlation with the variables (R2 > 0.85) and were statistically significant (p < 0.05).
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
In India, signalised intersections are the most complex locations on urban arterial roads. Complex flow patterns of vehicular traffic with varying static and dynamic characteristics could be considered as possible factors. Delay is a critical measure for evaluating an intersection's performance, which is difficult to assess due to the non-deterministic nature of vehicle arrival and departure rates. Researchers have implemented analytical and empirical models to estimate the average delay of vehicles at signalized intersections under homogeneous traffic flow and strict lane-disciplined traffic conditions. Webster’s classical delay formula is one of the prominent models for unsaturated traffic flow conditions at signalised intersections (Webster 1958) [1]. Numerous researchers have revised Webster's delay model to integrate saturated flow conditions, such as the Robertson model (Hurdle 1984) [2], the Akcelik model (Roess et al. 2006) [3], and the control model (HCM 2010) [4]. Although these models produced good results for homogeneous traffic situations, the same could not be replicated in heterogeneous traffic conditions. Generally, in India, Through Vehicles and Turning Vehicles are allowed in the same green phase, and the Light Vehicles try to surge to the front of queues by using possible lateral and longitudinal gaps without following lane discipline. This result in numerous conflicts, delays, and blockages arousing to Through Vehicles caused by Turning Vehicles and vice versa. So, there is an absolute need for a scientific model to predict delays at various lane assignments and to evaluate an intersection's performance under current traffic, geometric, and control conditions.
Previous studies have considered different variables to develop delay models for signalised intersections. Mousa [5] estimated the average deceleration and acceleration delay to be 11.7 s/veh at a signalized intersection. The study ignored the delay caused by non-stopped vehicles (7% of the total delay) compared to that of stopped vehicles (93% of the total delay). Dion et al. [6] also evaluated the delays at signal-controlled intersections at a fixed signal time and traffic flow ranged from unsaturated to highly saturated conditions. The study reported similar results for all delay models for signalised intersections with low traffic demand, but increasing differences were observed at high saturation flow. Darma et al. [7] identified the factors that contribute to control delays at signalised intersections. SIDRA and TRANSYT-7F softwares were used to calculate the delays which were found to be strongly associated with the cycle time, amber time, number of phasings, and number of lanes. Hoque and Imran [8] added an additive adjustment term to Webster's delay model to fit Bangladeshi traffic conditions. Su et al. [9] estimated delays for heterogeneous traffic at signalised intersections. The findings revealed that delays are mainly affected by the proportion and position of heavy vehicles in the queue. Kumar and Dhinakaran [10] estimated delays for mixed traffic conditions and found that there was no good association between observed and projected delays. Jian Huang et al. [11] developed an analytical delay model based on observations of queue formation and dispersal. Murat et al. [12] developed a multiple regression delay model to establish the relationship between cyclic vehicle queues and vehicular delays. Wang Z et al. [13] compared delay modes such as HCM 2000, Shanghai adjusted, Webster model, and deterministic queuing modes and concluded that HCM 2000 and the Shanghai adjusted models performed satisfactorily and showed similar outcomes at different volume–capacity (v/c) ratios. Webster’s model performed poorly when the v/c ratio was close to one, and the deterministic queuing paradigm was determined to be ideal for high v/c ratios. Fawaz and Khoury [14] proposed a model to estimate uniform delay to improve the accuracy of the HCM 2010 model at under-saturated signalised intersections. Preethi P et al. [15] modified Webster’s delay model using an artificial neural network (ANN) approach and suggested a correction factor for signalised intersections with varying control conditions. Arpit Saha et al. [16] modified the random delay term in HCM 2010 model using Simpson's rule with an estimating error of 3.9 per cent, and the modified method produces the best results. Lee Vien Leong and Jong Hui Lee [17] investigated the queuing behaviour of motorbikes and found that there is no considerable impact on delays in motorbikes halting at the stop line. Ashish Verma et al. [18] modified Webster’s delay model for Indian conditions and observed an error of 4–14% in the modified Webster's model and 14–35% in the basic Webster's delay model.
Wong and Wang [19] suggested lane-based optimization models with the goals of increasing capacity and reducing cycle time and delays. Wu [20] introduced a framework to assess the capacity of the shared lane and calculate the likelihood of a turning vehicle blocking the shared lane. Zeng et al. [21] proposed various lane-use assignment models to improve intersection performance. The previous literature examined the effects of dynamic lane assignment (DLA) on delays by considering a fixed cycle length [22,23,24]. Zhouand Zhuang [25] evaluated the performance of signalized intersections with a left-turn waiting area and shared left-turn lanes. The shared lanes at the intersection achieve a significant reduction in average delay compared to those without shared lanes. Ding et al. [26] proposed a model to optimize lane use for signalised intersections with cycle lengths of 60 and 150 s. Alhajyaseen et al. [27] proposed dynamic lane grouping to find the best lane group combined with the best signal timing parameters at isolated signalized intersections. Hongmei Zhou et al. [28] created a model to reduce average intersection delay by optimizing approach lane utilization and signal timings. Assi et al. [29] proposed a DLA approach based on the HCM delay model. At the intersection, Through Vehicles and Turning Vehicles usually share the same lane, and the conflict between these vehicle movements has an impact on the intersection's performance.
A limited number of studies have been conducted to improve intersection performance when lane sharing is used. The Central Road Research Institute (CRRI) conducted extensive research with the help of leading academic institutions in the country and found that the control delay model of HCM (2010) from the USA was very close to the observed control delay at selected intersections in India. The same theoretical model has been used in Indo-HCM [30]. The HCM (2010) [4] control delay thresholds range from 10 to 80 s, but Indian conditions are expected to cause higher delays due to congestion during peak hours. Besides, a wide range of lane behaviour was seen in the field under heterogeneous traffic conditions. So, the use of the HCM 2010 delay model for Indian traffic conditions may be questionable. Thus, the objective of this study is to develop delay models for different lane assignments of through vehicles (TV) and right turn vehicles (RTV) with different proportions of heavy vehicles.
Methodology
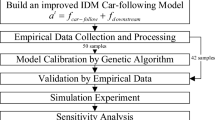
Simulation models were developed using SIDRA INTERSECTION software to analyze vehicle delays at signalised intersections for various lane assignments. Based on the field observations, possible lane assignments for each approach movement were assigned with varying proportions of TV and RTV. The proportion of heavy vehicles (HV) in both TV and RTV was also varied. SIDRA is a tool commonly used for the evaluation and design of signalised intersections, and it allows the modelling of separate movements. These movements can be assigned to different lanes, lane segments, and signal phases to estimate the approach delay of signalised intersections. The methodology for lane assignment models is shown in Fig. 1. The following assumptions are made for the development of lane assignment models:
-
Lane assignments are defined based on the observation of vehicle movements at signalised intersections.
-
U-turn traffic and separate pedestrian phases are ignored (minor U-turn and pedestrian movements observed in all approaches).
-
Movements of through vehicles (TV) and right-turn vehicles (RTV) are allowed in the same phase, and the left turn is considered a free left.
-
\({\text{Approach\;Demand for green phase }}({V}_{G}) ={V}_{\text{TH}}+{V}_{\text{RT}}\)
-
\({\text{Total Approach Demand }}({V}_{T}) ={V}_{\text{LT}}+{V}_{\text{TH}}+{V}_{\text{RT}}\)
-
\({\text{For each model proportion of }}{V}_{\text{RT}}\text{ is varied}={0.1}\text{to}{ 0.5\text{V}}_{\text{G}}\)
-
where,
-
VTH: Through volume at the approach
-
VRT: right turning volume at the approach
-
VLT: left turning volume at the approach (Free left)

Flow chart of methodology for lane assignment models
Data Collection
This study examined a sequence of five signalised intersections from Satyam junction to Thatichetlapalem junction in Visakhapatnam, India. North Bound (NB) and South Bound (SB) data from the four signalised intersections (Satyam, Gurudwara, 4th Town, and Akkayyapalem) were used to construct the models. The data from the fifth intersection (Thatichetlapalem) were used to validate the developed models. The study section comprises three types of data: geometric data, traffic data, and traffic control data. The geometric data were collected manually. The traffic data were collected using the video-graphic technique during the peak hours of typical weekdays (8:00 am to 10.30 am) and evening peak hours (4:00 pm to 6:30 pm). Morning peak hour volume was observed to be higher than evening peak hour volume; hence, this study's analysis was performed using morning peak hour volume. Table 1 shows all three kinds of data for each intersection.
Data Extraction and Analysis
The recorded video was played on a monitor in the traffic engineering laboratory to extract the traffic flow and the traffic control data. Intersection clearance times for various classes of vehicles were also extracted to estimate the Passenger Car Units (PCU). The vehicles are classified into six, such as two-wheelers (2 W), three-wheelers (3 W), standard cars (SC), buses (BS), light commercial vehicles (LCV), and heavy commercial vehicles (HCV). Figure 2 depicts the traffic volume composition for all approaches of selected intersections. It shows that the 2 W had the highest traffic composition, ranging from 51 to 69%, among the other classes of vehicles and the proportion of HV ranges from 1 to 11%. In this study, BS and HCV were considered heavy vehicles (HV). Table 1 shows the proportion of right-turn vehicles and peak hour approach volumes.

Composition of traffic volume at selected intersections
Estimation of Passenger Car Unit (PCU)
Sandeep Singh et al. [31] used Chandra’s method (Eq. 1) to evaluate the PCU at varying proportions of 2 W at signalised intersections. It was adopted in the current study to estimate PCU for each vehicle class at the signalised intersection, and the estimated values are shown in Table 2. Compared to the Indo-HCM, higher PCU values were obtained for buses and HCV. Average PCU values were used to convert volume into PCU.
where
-
PCUi = Passenger car unit of vehicle type i.
-
Ic, Ii = Average intersection clearance time of the standard car and vehicle type i, respectively.
-
Ac, Ai = Projected area of standard car and vehicle type i, respectively.
Model Formulation
This paper evaluates the approach delays of TV and RTV at various lane assignments by applying SIDRA Intersection software. Figure 3 shows the lane behaviour of TV and RTV movements at Satyam junction. Figure 3a depicts the initial position of approaching vehicles. Figure 3b and c shows the median side lane (lane 1) is shared by RTV and through heavy vehicles (THV). Figure 3d shows TV sharing lane 2 and the short lane. The lane occupancy of TV and RTV movements varied depending on approach demand and driver behaviour. As a result of the observation of lane behaviour in the field, four-lane assignment models have been developed through this research (shown in Fig. 4). In model-1, the median side lane (lane 1) was exclusively assigned for RTV, whereas in model-2, lane 1 was assigned for through heavy vehicles (THV) and RTV. In model-3, lane 1 was exclusively allotted for RTV, and lane 2 was assigned for through vehicles (TV) and right turn light vehicles. In model-4, both lanes 1 and 2 were assigned for either TV or RTV.

Observed lane behaviour of through and right turn vehicles at Satyam junction

Lane assignment details for models 1–4
Saturation flow (SF) was estimated by applying the methodology described in Indo-HCM: 2017 [30], and these values were assigned to all lanes in the approach based on lane width. At the intersection, there was a flare and an anticipation effect; hence, an adjustment factor was used as per Indo-HCM when computing saturation flow. Table 1 shows the geometric characteristics of intersections, the minimum, and the maximum approach widths are observed to be 8 and 12 m, respectively. The standard width of a lane is considered as 3.5 m, and for additional approach width, short lanes (SL) were assigned with a maximum width of 2.5 m. The length of SL was measured from the stop line which was varying from 30 to 60 m. The following parameters were used in SIDRA to calibrate the models to represent existing field conditions such as PCU values (Table 2), geometric and traffic control characteristics as shown in Table 1. HCM delay method was used to simulate the delay values at different proportions of RTV and HV as shown in Fig. 5.

Approach delay of lane assignment models (1–3) at various proportions of RTV and 6% heavy vehicles
Results and Discussion
The lane assignment models were performed by varying RTV from 10 to 50% and HV from 0 to 12%. Figure 5 shows the approach delay of lane assignment models (1–3) at various proportions of RTV and 6% HV. Model 1 results depict a decrease in the delays with an increase in RTV from 10 to 40%. This is due to lane 1 having a lower v/c ratio than the other lanes at 10% of RTV. Further, approach delay increased at 50% RTV due to relatively higher v/c ratio in lane 1.
Model 2 results show that delays at the Satyam junction south and east bound approaches vary significantly with RTV proportion, whereas delays at all other approaches show no significant variation. At 50% of RTV, models 1–3 have shown similar results. Model 4 considered approaches that share either through or right turn vehicles in the green phase. This can be seen at the NB and EB approaches at selected three-legged intersections. However, the proportion of RTV was not considered in this model. Results showed that delays of approach vehicles increased with the proportion of HV (Fig. 6).

Delay of through and right turn vehicles at a varying proportion of heavy vehicles
Figures 5 and 6 show that the magnitude of delay varies from approach to approach. This is due to the variation in signal cycle time and the effective green time to cycle time (g/C) ratio. The overall approach delay increased with increasing cycle time. The approach delay of Akkayyapalem Junction (SB) varied from 40 to 170 s among all models for different proportions of RTV. Similarly, the approach delays at Gurudwara junction (SB), 4th town junction (SB), and Satyam junction varied from 115 to 285 s, 108 to 325 s, and 90 to 340 s, respectively. Moreover, "the differences in delays" were observed between the approaches due to varying g/C ratios, v/c, and proportion of HV.
Multi-linear regression (MLR) models were developed to find delays by considering various factors including RTV, HV, v/c ratio, g/C ratio, and cycle time (CT). The correlation between g/C and C was estimated to be 0.65. So, these two parameters can be considered as independent variables, even though they were inter-related to each other. For this, a statistical tool (SPSS) is used. MLR Eqs. (2–5) were developed for defined lane assignment models 1 to 4, respectively.
x1 = Percentage of Right Turn Vehicles (varying from 10 to 50%).
x2= Percentage of Heavy Vehicles (varying from 1 to 12%).
x3 = Volume to the Capacity ratio (v/c, varying from 0.8 to 2.3).
x4 = Effective green time to cycle time ratio (g/C, varying from 0.17 to 0.40).
x5 = Cycle Time (CT varying from 90 to 180 s).
In models 1 to 3, RTV exhibited a negative effect; it is due to a lower percentage of RTV with an exclusive lane and other variables depicted a positive effect. In model 4, the v/c ratio exhibited a positive effect, whereas the remaining variables showed a negative effect; implying that delay increases with the proportion of the v/c ratio increases.
Model Validation
Lane behaviour at the Thatichetlapalem intersection was relevant to lane assignment models 2 and 4. So these models were validated for the Thatichetlapalem intersection and compared to the results of the Indo-HCM model. Model 2 simulated the south approach, while model 4 replicated the north and east approaches, respectively. Figure 7a depicts the results of all approaches of the Thatichetlapalem intersection. Model 2 had a higher delay (18 s), while model 4 has almost identical delays to the Indo-HCM model. Figure 7b to d shows delays of models 2 and 4 with varying v/c ratios while keeping all other variables as constant. Higher delays were predicted by the Indo-HCM model for v/c ratios less than 0.85 and greater than 1.15. Moreover, all the models are validated statistically, and the results are presented in Table 3. All the models have shown a good correlation (R2 > 0.85) with a p value less than 0.05, implying that variables have a significant effect on delay. Further to justify the proposed models, they were compared with Indo-HCM and HCM2010 models, and the results as shown in Fig. 8.

Comparison results of lane assignment models with Indo-HCM Model

Comparison results of lane assignment models with the Indo-HCM and the HCM 2010 models
The Indo-HCM and HCM (2010) models predicted relatively lower delays than the proposed models because the proposed models include parameters such as the percentage of HV and the proportion of RTV. At Thatichetlapalem intersections, about 6% of HV and 38.5% of RTV were seen. Because of the above conditions, the acquired results from these two models were not compatible with the results of the proposed model. The HCM 2010 model estimated comparatively lower results than the Indo-HCM model because it was proposed for homogeneous traffic conditions.
Conclusions
Several models have been proposed by the previous literature to estimate delays at signalised intersections with homogenous and lane-based traffic conditions. However, these models have shown more discrepancies in high saturation flow conditions. Hence, this study has proposed delay models for observed lane behaviour based on the data collected at five signalised intersections in Visakhapatnam, India. Geometric data were collected manually, and traffic data were collected using the video-graphic technique during the morning peak hours (8:00 am to 10.30 am) and evening peak hours (4:00 pm to 6:30 pm) of a typical weekday at these intersections. The classified traffic flow, signal control data, and intersection clearance times were extracted from the recorded videos. PCU values were estimated by using the intersection clearance time. Four-lane assignment models were built in the SIDRA INTERSECTION software based on the observed lane behaviour at selected intersections. Further, based on the simulation results, multi-linear regression delay models were developed for defined lane assignments by considering RTV, HV, v/c ratio, g/C ratio, and cycle time (CT). The following conclusions have been drawn:
-
1.
With an increase in the percentage of heavy vehicles from 0 to 12%, all models indicate that delays could increase by up to 50%. Changes in delay were also affected by cycle time, the ratio of volume to capacity, and the ratio of green time to cycle time.
-
2.
Models 1 and 3 depicted a decrease in the delays, whereas Model 2 showed a little variation in the delays with an increasing RTV up to 40%, beyond that the delays increased with RTV proportion.
-
3.
Models 2 and 4 were validated using the data at Thatichetlapalem intersections, and results were compared to the Indo-HCM model. Model 2 had an 18-s delay, and model 4 had nearly an identical delay. The Indo-HCM model predicts higher delays for v/c ratios of less than 0.85 and more than 1.15 when all other variables remained constant.
-
4.
The proposed models have shown a good correlation (R2 > 0.85) with a p value less than 0.05, indicating that they are statistically significant.
-
5.
The research findings concluded that the proposed models might accurately predict approach delays at signalized intersections based on the observed lane behaviour. The study recommends separate right-turn lanes at intersections when the proportion of RTV is greater than 40% for better performance.
References
F. V. Webster, Traffic Signal Settings. Department of Scientific and Industrial Research. Road Research Technical Paper No. 39, Her Majesty's Stationary Office, London, England (1958).
V.F. Hurdle, Signalized Intersection Delay Models—a primer for the Uniformed. Transp. Res. Rec. 971, 96–105 (1984)
R.P. Roess, W.R. McShane, E.S. Prassas, Traffic Engineering, 2nd edn. (Prentice-Hall, New Jersey, 2006)
HCM, “HCM 2010: Highway Capacity Manual”, Special Report No. 209, 5th Edition (2010),
R.M. Mousa, Analysis and modelling of measured delays at isolated signalized intersections. J. Transp. Eng. (2002). https://doi.org/10.1061/(ASCE)0733-947X(2002)128:4(347),347-354
Dion, F., Rakha, H., Kang, Y, Comparison of delay estimates at under-saturated and over-saturated pre-timed signalized intersections’, Transp. Res. B, Method. 38(2), 99–122 (2004).
Y. Darma, M. Karim, J. Mohamad, S. Abdullah, Control Delay Variability at Signalized Intersection Based on HCM Method. Proc. Eastern Asia Soc. Transport. Stud. 5, 945–958 (2005)
S. Hoque, A. Imran, Modification of the Webster’s Delay Formula under Non–lane Based Heterogeneous Traffic Condition. J. Civil Eng., 81–92 (2007).
Y. Su, Z. Wei, S. Cheng, D. Yao, Y. Zhang, L. li, Delay Estimates of Mixed Traffic Flow at Signalized Intersections in China”, Tsinghua Science and Technology ISSN 1007–0214, 02/18ll, pp157–160 (2009).
R. Prasanna Kumar, G. Dhinakaran, Estimation of delay at signalized intersections for mixed traffic conditions of a developing country. Int. J. Civil Eng. 11(1), 53–59 (2013)
Jian Huang, Ge Li, Qi Wang, Haitao Yu, Real-Time Delay Estimation for Signalized Intersection Using Transit Vehicle Positioning Data” 2013 13th international conference on ITS Telecommunications (2013).
S.Y. Murat, S. Kuthuhalan, Z. Cakici, Investigation of cyclic Vehicle Queue Delay and delay Relationship for Isolated Signalized Intersections. Proc. Soc. Behav. Sci., 111, 252–261 (2014)
Z. Wang, S. Chen, H. Yang, B. Wu, Y. Wang, Comparison of delay estimation models for signalized intersections using field observations in Shanghai. IET Intel. Transport Syst. 10(3), 165–174 (2016)
W. Fawaz, J. El Khoury, An exact modelling of the uniform control traffic delay in under saturated signalized intersections. J. Adv. Transp. 50(5), 918–932 (2016)
P. Preethi, Aby Varghese, R. Ashalatha, Modelling Delay at Signalized Intersection under Heterogeneous Traffic Condition (2016).
A. Saha, S. Chandra, I. Ghosh, Delay at Signalized Intersections under Mixed Traffic Conditions. J. Transp. Eng. A Syst., 143(8), 04017041 (2017)
Lee Vien Leong, Jong Hui Lee, Impact of Motorcyclists’ Travel Behaviour on Delay and Level-of-Service at Signalized Intersections in Malaysia” © Springer International Publishing Switzerland (2017).
Ashish Verma, G. Nagaraja C. S. Anusha Sai Kiran Mayakuntla, “Traffic Signal Timing Optimization for Heterogeneous Traffic Conditions Using Modified Webster’s Delay Model.” Transp. Dev. Econ. 4, 13 (2018).
C.K. Wong, S. Wang, A Lane-Based Optimization Method for Minimizing Delay at Isolated Signal-Controlled Junctions. J. Math. Model. Algorithms., 2(4), 379–406 (2003)
N. Wu., Determining the capacity of share lanes with permitted left-turn movements at signalized intersections—modeling the effect of blockage”, in Proceedings of the 6th International Conference on Traffic and Transportation Studies Congress, Nanning, China, Vol. 322, 2008, pp. 791–800 (2008).
Y. Zeng, Y.Y. Ma, X. G. Yang, Dynamic Lane-Use Management at Isolated Intersections with Demand Responsive SignalControl”.12th WCTR, July 11–15, 2010–Lisbon, Portugal (2010)
Z. Zhong, et al., An optimization method of dynamic lane assignment at the signalized intersection”. In: International Conference on Intelligent Computation Technology and Automation (ICICTA). 1277–1280. 2008. IEEE (2008).
L. Zhang, G. Wu, Dynamic lane grouping at isolated intersections: problem formulation and performance analysis. Transp. Res. Rec. 2311(1), 152–166 (2012)
M.M. Najjar, The Effectiveness of Applying Dynamic Lane Assignment at All Approaches of Signalized Intersection” (King Fahd University of Petroleum and Minerals, Department of Civil and Environmental Engineering, 2015)
Y. Zhou, H. Zhuang, Traffic Performance in Signalized Intersection with Shared Lane and Left-Turn Waiting Area Established. J. Transp. Eng., 138(7). ©ASCE, ISSN 0733–947X/2012/7-852-862 (2012)
J. Ding, H. Zhou, R. Yao, Optimization of lane use and signal timing for isolated signalized intersection with variable lanes. In: International Conference of Transportation Professionals CICTP 2014, pp. 2012–2024.
Alhajyaseen, K. M. Wael Najjar, Muath, Ratrout, T. Nedal, Assi, Khaled, The effectiveness of applying dynamic lane assignment at all approaches of signalized intersection. Case Studies on Transport Policy, S2213624X17300287. https://doi.org/10.1016/j.cstp.2017.01.008 (2017)
Hongmei Zhou, Jing Ding, Xiao Qin, Optimization of Variable Approach Lane Use at Isolated Signalized Intersections. Transportation Research Board, Washington, D.C., 2016, pp. 65–74. https://doi.org/10.3141/2556-07 (2016).
K.J. Assi, N.T. Ratrout, Proposed quick method for applying dynamic lane assignment at signalized intersections. IATSS Res. 42(1), 1–7 (2018)
I.H.C. Manual, (Indo-HCM), Central Road Research Institute (New Delhi, India, 2017)
Sandeep Singh, Borigarla Barhmaiah, Ashith Kodavanji, Moses Santhakumar, Analysis of Two-Wheeler Characteristics at Signalised Intersection under Mixed Traffic Conditions: A Case Study of Tiruchirappalli City” © ASCE Resilience and Sustainable Transportation Systems (2020)
Funding
Authors declare that there is no funding for this article.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Authors declare that this article has no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreementwith the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Borigarla, B., Santhakumar, S.M. Delay Models for Various Lane Assignments at Signalised Intersections in Heterogeneous Traffic Conditions. J. Inst. Eng. India Ser. A 103, 1041–1052 (2022). https://doi.org/10.1007/s40030-022-00673-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40030-022-00673-x