
Abstract
It is highly desirable to have a reliable modal parameter estimation technique with output-only measurements, especially for tall structures subjected to ambient wind loads. A modal identification technique called second-order blind identification (SOBI) is discussed in this paper to estimate the modal parameters of tall structures subjected to ambient loading. This method requires only acceleration time history data. The data are first preprocessed through cross-correlations to obtain the free response. SOBI uses these free responses to generate the mixing matrix (i.e., modal matrix) and sources, which are the modal responses of the structure. Even though SOBI has earlier been employed for modal parameter estimation, the majority of works attempt to solve small academic problems. Keeping this in view, we attempt to solve some practical engineering problems associated with tall structures. The proposed modal estimation technique is first evaluated using synthetic data of a 76-story tall benchmark building with varying levels of noise and later validated with the experimental data of the 610 m tall Guangzhou New TV Tower (GNTVT). Investigations carried out in this paper, using numerical and experimental ambient responses of tall structures, clearly indicate that the modal parameters estimated using SOBI are comparing very well with theoretical values.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Modern construction technologies compelled by the scarcity of urban land for construction resulting in the construction of tall, flexible multipurpose buildings all over the world. Because of innovative materials and construction practices, these tall buildings are becoming more slender and flexible. Therefore, these structures are often prone to damages during their service life. Hence, there is an urgent need to monitor these tall structures continuously to ensure the safety and security of human lives and assets. Fast and robust modal parameter estimations techniques can be handy to continuously monitor the health of these tall flexible structures.
Research in Modal parameter estimation techniques using ambient vibrations has attained greater significance in the past two decades. This is basically due to the realization of its importance in several engineering disciplines like civil, mechanical and aerospace engineering. These modal identification techniques using ambient vibrations are popularly known as operational modal analysis (OMA) methods. These modal parameter estimation techniques are quite effective for health assessment and also vibration control of structures during natural calamities like earthquakes or cyclones. Further, these techniques can be effectively used to perform response spectrum analysis for civil engineering structures to meet the seismic demand during earthquakes. Modal parameter estimation using ambient data poses several challenges which include the presence of non-stationarity in measured vibration (time -history) measurements with high levels of measurement noise, presence of closely spaced modes. Because of this, it is essential to have an accurate modal parameter technique capable of handling non-stationary in the measured vibration data corrupted with noise and possibly closely spaced modes. Second-order blind identification (SOBI) technique is discussed in this paper for modal parameter estimation using ambient vibration measurements of tall structures. Before going into the details of the formulations of the BSS technique a brief outline of the existing techniques, their strengths and weaknesses are briefly outlined.
Previous Research
The operational modal analysis techniques can be broadly classified based on their domain of implementation as time-domain and frequency-domain methods. While time-domain techniques directly use the measured dynamic responses or their correlation functions, the frequency-domain methods work with the power spectral densities of the measured responses. Frequency-domain methods have not gained much popularity due to numerical conditioning issues. The time-domain techniques, on the other hand, can deal with noise corrupted measurements effectively. Apart from this, typical signal processing errors like leakages can be avoided using time-domain methods.
All the time-domain modal identification algorithms work well with free responses. The random decrement technique [1] is used popularly in the literature, to extract free responses from the measured vibration data from the structures subjected to ambient loading, The Ibrahim Time-Domain (ITD) method [2] or the Least-Squares Complex Exponential (LSCE) method [3] are also employed for modal parameter estimation using the free decay responses. Time series models like autoregressive (AR) [4] and autoregressive moving average (ARMA) [5]) are also employed for modal identification of structures using directly the ambient vibration responses. Similarly, techniques like stochastic subspace identification (SSI) [6], eigensystem realization algorithm combining with natural excitation technique (NEXT-ERA) [7], a Bayesian-modal parameter identification technique [8] are also reported in the recent literature for modal parameter estimation using ambient vibration measurements. While techniques like AR model, SSI, NEXT-ERA works with an assumption that the measured vibration responses due to ambient loading are white noises, techniques like ARMA and Blind Source Separation (BSS) do not require such strict assumptions. However, ARMA techniques are more complex when compared to the AR model, SSI and NExT-ERA.
The SSI method assumes a zero-mean Gaussian white noise input. Because of this, it is difficult to isolate the dominant frequency components from the eigenfrequencies of the structure, if the input excitation contains any additional dominant frequencies apart from the white noise. Similarly, considerable difficulties exist in using frequency-domain-based methods like frequency-domain decomposition to identify closely spaced modes. Most of the modal identification techniques ultimately reduce to a system of linear equations and are usually solved using least-squares techniques. Therefore, bias error or variance error could occur due to noise effects, including measurement noise, leakage, residues, etc. Engineering practice has shown that very little improvement can be done to reduce the error at the expense of a heavy computational penalty. Accuracy issues would be significant where there are many measurements in noisy media, or where the structures are complex in nature, e.g., structures with supplemental damping devices like active and tuned mass dampers, and structures containing closely spaced modes in highly damped environments. In many cases of identification, it is noticed that most of the time-domain techniques fail to identify structures with moderate to high damping [9]. The literature is replete with instances where most of the aforementioned methods are consistently failed to identify structures in moderate to high damping environments with a sufficient degree of confidence. Because of the above limitations, the modern techniques based on time–frequency analysis like Hilbert Huang Transformation (HHT), time-scale analysis like wavelets and multivariate analysis like blind source separation techniques are gaining popularity and it is clearly evident from several works reported in the recent past [10,11,12,13].
Several time–frequency or time-scale methods like short-term Fourier transform, wavelet transform and Hilbert Huang transform(HHT) being used popularly by structural health monitoring research community presents information simultaneously both in time and frequency domains and thereby provides an alternative approach for processing measured time history signals. HHT [14, 15] is an adaptive signal processing technique and is particularly useful to process nonlinear and non-stationary signals [11] and therefore ideally suited to civil engineering structures. In the past few years, modal parameter estimation techniques based on Wavelet transform and HHT are also developed using ambient vibration responses of structures. Majority of these methods, obtain the free responses from the measured ambient time history data using the random decrement method. The HHT based approach [16] was further extended to identify the mode shapes as well as the system parameters [17, 18] using free vibration data. Modal parameter estimation technique [19] using forced response data was developed by combining RD technique with HHT. The free-response from forced time history response is first extracted using RD technique and then Hilbert–Huang transform is employed on these free responses for modal parameter estimation. Similarly, using RD signatures, a method is proposed in the literature [20] based on the continuous Morlet wavelet transform. A modified HHT method for modal parameter identification was proposed [21] using the free responses obtained from RD technique. Chen and ou [22] proposed a technique by combining continuous wavelet transform with the ARX model [23] to extract modal parameters of a cable-stayed bridge. In their modal identification technique, they have directly used the ambient data instead of using their derived free responses. Both these time–frequency analysis techniques i.e., wavelets as well as HHT have their strengths and weaknesses and they purely depend on the application on hand. Mode mixing and handling closed spaced modes are the major problems associated with the time–frequency analysis techniques like HHT especially while using the empirical mode decomposition (EMD).
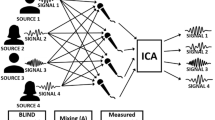
In the recent past, BSS techniques have emerged as a promising alternative to the existing operational modal analysis approaches. BSS basically aims at recovering the sources using only the measured mixtures [24]. Among several BSS algorithms, higher-order algorithms like independent component analysis (ICA) [25], second-order algorithms like algorithm for multiple unknown signals extraction (AMUSE) [26] and second-order blind identification (SOBI) [24, 27] are well established. ICA is earlier used for operational modal analysis and found to be ineffective for systems with damping greater than 1%. However, some recent techniques overcome this limitation of ICA [28]. But it involves the transformation of the measured data into the frequency domain and use as input to ICA and later retransforming the sources back to the time domain to obtain modal responses. These transformations from time to frequency domain and back to time domain lead to considerable transformation errors. AMUSE [26] is based on simultaneous diagonalization of only two correlation matrices using SVD/EVD. In AMUSE, two correlation matrices, one at zeroth time lag and the other at a time lag of \(\tau\), are generated. Nevertheless, it is difficult to estimate the time lag \(\tau\), to generate the correlation matrices, to accurately estimate the mixing matrix and the independent sources. Results from AMUSE could also contain two similar eigenvalues [24] which is one of its drawbacks. Further, the performance of AMUSE deteriorates significantly in the presence of noise in the measurement, which is often the case for practical engineering problems. On the other hand, SOBI overcomes this limitation by using joint diagonalization procedure to arrive at an orthogonal matrix that diagonalizes a pre-specified number of covariance (zero-mean correlation) matrices. Therefore, it is more robust than AMUSE in handling measurement noises and also the other limitation of choosing appropriate time lag \(\tau\) is not present in SOBI. Keeping these things in view, in this paper, we chose second-order blind identification (SOBI) for modal parameter estimation and applied to practical engineering tall structures using ambient vibration data. A more thorough treatment of the basic ideas underlying SOBI and AMUSE can be found in this reference [29].
SOBI is successfully employed by several researchers for operational modal analysis (OMA) to estimate the mixing matrix and sources. A wide range of modal identification applications including non-stationary and non-white excitations [30], closely spaced modes and low energy modes [31], partial sensor measurements [30, 32], complex modes [33] and time-varying systems [34] are investigated in the literature with varying degrees of success. Further, these BSS-based OMA are also developed for the undetermined case. Popular among them are the methods exploiting sparsity [35], tensor decomposition methods [36], Hankel matrix-based methods [37, 38].
SOBI is also explored to address some specific issues related to OMA. Some of these issues are the presence of low energy modes, non-stationarity in the responses, narrow band excitations, closely spaced modes, limited sensors and damage detection. Similarly, the performance of BSS algorithms also validated using different full-scale testbeds, e.g., airport control tower, pedestrian bridges, highway bridges, tunnels, time-varying systems and off-shore structures. However, a detailed review of these BSS-based OMA is beyond the scope of the present work and can be found elsewhere [39].
Present Work
-
i.
In the present work, it is shown through detailed formulations that the measured time history response from ambient wind loads with both stationary random excitations and non-stationary random excitations can be effectively handled by the cross-correlation function or the auto-correlation function of structural response and can be used as input to SOBI instead of the directly measured responses. The proposed approach can effectively handle the measurements corrupted with high levels of noise, which is demonstrated through numerical investigations later in this paper.
-
ii.
It is observed from the literature, that the SOBI has not so far been employed for operational modal analysis of the wind sensitive practical engineering structures like the 306 m high, 76 story building, popularly being used as a vibration control benchmark problem and the 610 m tall Guangzhou New TV Tower (GNTVT) subjected to ambient wind excitations, while several other OMA algorithms have been investigated for modal identification of these two problems. Therefore, in this paper, it is proposed to investigate and present the effectiveness of the SOBI for modal identification of these wind sensitive tall practical engineering structures.
-
iii.
The formulations of SOBI, proposed by the first author [40], for structural health monitoring, which employs a computationally efficient and modified Joint approximate diagonalization (JAD) procedure, are used in the present work, for OMA of practical engineering problems.
In the next section, we present the theoretical background of this method. The proposed modal parameter estimation method is evaluated by using the synthetic responses from a benchmark tall framed structure with varying levels of measurement noise. The proposed technique is also evaluated using the experimental data of the 610-m high multipurpose observation tower popularly known as GNTV tower.
Blind Source Separation
The dynamic equilibrium equation of a generic n degree of freedom, time-invariant, linear system can be expressed as
where M, C, and K matrices are (n × n) mass, damping, and stiffness matrices of the structure, respectively. z(t) and F(t) are nx1 displacement and excitation vectors, respectively.
The external excitation on the structure is usually related to its dynamic response though a convolutive mixture. Alternatively, we can also interpret the dynamic response as a static mixture of sources s(t)( i.e., the modal coordinates q(t) in modal superposition techniques).
By comparing Eqs. (1) and (2), we can interpret that the independent sources s(t) as modal responses q(t) and the mixing matrix \(\left[ A \right]\) as the modal matrix \(\left[ \varphi \right]\).
In the context of OMA, it can be interpreted that the SOBI attempt to recover from the measured time history responses (interpreted as observed mixtures), y(t), the modal time history responses represented in the form of sources s(t) and the modal matrix consisting of mode shapes of the structure represented in the form of a mixing matrix A.
Majority of ambient system identification methods using SOBI utilize the response measurements directly. Since the responses under random excitation grow and decay in the same manner as the input and thus free decay cannot be observed, unlike impulse responses. This poses difficulty in estimating damping in SOBI. To alleviate this problem, in the present work, correlation of responses is used to perform BSS than the direct responses. Usage of correlated responses instead of directed responses helps in handling spatially uncorrelated noise.
Cross-correlation of Measured Responses
The presence of measurement noise is inevitable at any measured time history response signal and it cannot be avoided. Hence, an effective modal identification method must have the ability to provide robust identification results by extracting suitable features without distorting from the noise present in the measured time history responses.
The measured acceleration time history response (raw dynamic signatures) at any typical spatial location of a structure can be expressed as
in which \(\tilde{z}(t) = [\tilde{z}_{1} (t), \, \tilde{z}_{2} (t),.........\tilde{z}_{n} (t)]^{{\text{T}}}\) are the measured dynamic signatures (raw acceleration time history signals) of length ‘n’ of the structure. These raw signals are polluted with measurement noise. This noise is generally represented by zero-mean white Gaussian noise with a unit standard deviation,
Choosing two typical spatial locations (sensor nodes) on the structure, say r and s and we can evaluate the cross-correlation function of the measured dynamic signatures (acceleration time history responses) at these two spatial locations.
In Eq. (6), \(E\left[ {z_{r} (t) \, \xi_{s} \left( {t + \tau } \right)} \right] = E\left[ {z_{s} \left( {t + \tau } \right)\xi_{r} \left( t \right)} \right] = 0\) as the white Gaussian noise is uncorrelated with the response.
Similarly, in Eq. (6), \(E\left[ {\xi_{r} \left( t \right)\xi_{s} \left( {t + \tau } \right)} \right] = \left\{ \begin{gathered} 0\,\,if\,\,\tau \ne 0 \hfill \\ \sigma^{2} \,\,if\,\,\tau = 0 \hfill \\ \end{gathered} \right\}\) where \(\sigma\) is the standard deviation of the white Gaussian noise.
Apart from the measurement noise, the measured dynamic signatures of a structure under ambient excitations are usually more complex and rather difficult to handle. The majority of output-only damage diagnostic techniques are proposed in the literature assumes that either the free vibration response or the impulse response is available for modal identification. Alternatively, in some of the earlier works, it is assumed that the structural vibration response obtained is from white Gaussian noise excitations. However, it is impractical to realize free vibration or impulse response measurements from civil structures as they are usually spatially large with huge mass. Even if it is realizable, we need to suspend the normal operations on the structure, for example, regular traffic needs to be suspended to measure the dynamic signatures. Hence, special efforts are needed for the development of modal parameter estimation methods based on ambient vibration data.
In reality, both the components of stationary random excitations and non-stationary random excitations will be present in the measured dynamic signatures of the civil structures with the ambient excitations. As mentioned earlier, the ambient excitations on a structure can be represented by splitting into stationary and non-stationary components.
where \(f_{st} (t)\) and \(f_{nst} (t)\) are the stationary and non-stationary components, respectively.
Non-stationary random excitation \(f_{nst} (t)\) can be represented as the sum of periodic (\(f_{nst}^{p} (t)\)) and aperiodic (\(f_{nst}^{{\tilde{p}}} (t)\)) components.
If the value of \(E[f_{st}^{2} (t)]\) is much greater than, \(E[f_{nst}^{2} (t)]\) then we can assume that the structure is subjected to stationary random excitation, otherwise, we need to consider that the predominant forces acting on the structure are non-stationary.
We can write the structural response at any typical rth and the sth nodes of a structure (with \(n_{s}\) sensor nodes), subjected to excitation force f(t)
where the superscripts ‘st’, ‘p’, and \(\overline{p}\) refers to the structural response subjected to stationary random excitations, periodic and aperiodic force excitations, respectively.
We can write the cross-correlated response of the two signals given in Eq. (13) as
where
We can write the cross-correlation under stationary random excitation component given in Eq. (10) as
where \(n_{s}\) is the number of frequencies excited by the stationary random excitation, \(B_{{rs}}^{j}\) is a coefficient of mode j, associated with nodes r and s. \(\omega _{{}}^{j}\) is the jth natural frequency excited due to the stationary random excitations. Similarly, \(\zeta_{j}\), \(\omega _{d}^{j}\), and \(\varphi_{j}\) are the damping ratio, damped natural frequency and the phase angle of the jth mode, respectively.
Since the response of a linear structure subjected to a periodic excitation, \(f_{nst}^{p} (t)\), will be periodic with the frequencies same as the excitation frequencies. Accordingly, the cross-correlation of the measured structural responses at the node, r and node, s under periodic excitation given in Eq. (12) can be written as.
where \(k\) is the number of frequencies excited by the periodic random excitation, \({\omega }^{h}\) is the hth frequency excited due to the periodic excitations. \({B}_{rs}^{h}\) and \({\varphi }_{h}\) are, respectively, the amplitude and phase angle associated with hth mode. Since Eqs. (12) and (13) have similar expressions, they can be combined as
where \(C_{{rs}}^{j}\) refers to the amplitude of the jth mode cross-correlated response of nodes r and s. \(\omega_{d}^{j} = \omega_{{}}^{j} \sqrt {1 - \zeta_{{}}^{{j^{2} }} }\) where \(\omega_{d}^{j}\) and \({\upomega }_{{}}^{j}\) are the damped and undamped natural frequencies respectively. \({\upzeta }_{{}}^{j}\) are the critical damping ratio and subscript j refers to the mode number. In matrix form, Eq. (14) can be represented as
The similarity between Eq. (3) and (15) can be observed easily when the correlation of the responses contained in R is used instead of z. From this, we can conclude that the problem of modal identification of structures with ambient vibrations can be recast into the framework of SOBI for free vibration. Here, while the modal responses represent the independent sources, the columns of the mixing matrix give the mode shapes.
Second-Order Blind Identification(SOBI)
The SOBI basically attempts to evaluate a matrix U which jointly diagnolizes all the constructed time-lagged covariance matrices from the free responses of the corresponding measured time history data.
SOBI works with the assumption that the sources are uncorrelated, stationary and their covariance matrix is an identity matrix. To meet these requirements, the first step in the SOBI is pre-whitening the signal associated with the measured responses, z(t).
-
(i)
The whitening matrix can be derived by performing SVD on the centralized data set as follows:
-
a
Evaluate the covariance matrix of the measured responses z(t)
$$\overline{R}_{zz} (0) = \frac{1}{N}\sum\limits_{j = 1}^{N} {z(j)z^{T} (j)}$$(16)where N is the total number of measured samples of response time history.
-
b
Decompose \(\overline{R}_{zz} (0)\) using SVD
$$\overline{R}_{zz} (0) = U\sum U^{T} = U_{z} \sum_{z} U_{z}^{T} = U_{m} \sum_{m} U_{m}^{T} + U_{n} \sum_{n} U_{n}^{T}$$(17)where Um is a matrix of size nxm principal components corresponding to the first m singular values of \(\sum\nolimits_{m} { = Diag(\sigma_{1} ,} \, \sigma_{2} ,.......\sigma_{m} )\). Un is a matrix of size (n-m) x m associated with noise singular values of \(\sum\nolimits_{n} { = Diag(\sigma_{m + 1} ,} \, \sigma_{m + 2} ,.......\sigma_{n} )\);
-
c
The whitening matrix \(W = \sum_{{_{m} }}^{ - 1/2} U_{m}^{T}\)
-
d
Whiten the measured responses \(\overline{z}(t) = Wz(t)\);
-
(ii)
Evaluate covariance matrices \(\overline{R}_{zz} (t_{k} )\), where k = 1 to p, where p is greater than the number of interesting modes
-
(iii)
Employ the joint approximate diagonalization (JAD) technique [25] on all the generated p covariance matrices to evaluate the unitary matrix [\(\psi\)] which diagonalizes all these p matrices approximately. This is ultimately formulated as an optimization problem with the objective function being the minimization of the sum of all off-diagonal terms of the resulting p matrices after performing transformation with the unitary matrix [\(\psi\)].
$$\frac{\min }{\psi }\sum\limits_{k = 1}^{p} {off - diagonal} \left[ {\psi^{T} \overline{R}_{zz} \left( {t_{k} } \right)\psi } \right]$$(18)Jacobi method [25] is usually employed to solve this minimization problem;
-
(iv)
The unitary matrix [\(\psi\)] obtained using JAD process in step (iii), is used to evaluate the mixing matrix [A] as \(W^{ + } \psi\) and demixing matrix [U] as \(\psi^{T} W\), where superscript + , denotes the pseudo-inverse;
The source matrix can be evaluated as {s(t)} = [U]{z (t)}. The columns of the mixing matrix represent the mode shapes of the structure. The noise mode shapes can be isolated from the true mode shapes of the structure using the Modal Assurance Criterion(MAC). The natural frequencies and damping ratios corresponding to the valid mode shapes can be estimated using regression on zero-crossing times and logarithmic decrement techniques on the associated sources (modal responses) respectively.
Numerical Studies
The numerical investigations are carried out on a 306-m high 76-story office tower building. The synthetic vibration data from the numerical simulation of the tall framed structure is used to test the effectiveness of the SOBI based modal Parameter estimation algorithm of large practical engineering problem with noise corrupted data.
Studies have also been carried out by using the experimental data. Modal estimations have been carried out employing SOBI by using the measured time history responses of 610-m astronomical and sightseeing Tower popularly known as Guangzhou New TV Tower (GNTVT). This multipurpose observation tower was constructed in the Haizhu District of Guangzhou, China.
Seventy-Six Story Benchmark Office Tower Building
The numerical example considered for investigations in this paper is a concrete office tower building [16] with 76 stories, 306.1 m height, and 42 m width, proposed for the city of Melbourne, Australia. Due to slenderness (aspect ratio of 7.3), the building is sensitive to wind excitations. This large and practical example is chosen to evaluate the effectiveness of the SOBI based modal identification algorithm. This structure is popularly being used as a benchmark problem for evaluating and characterizing varied control devices and control algorithms for response reduction when it is subjected to strong wind force excitations. The complete details of the benchmark problem and the FE model can be found in Yang et al. [16]. However, a brief description of the FE model is given here. The benchmark office tower building with 76-storys is modeled as a vertical cantilever Bernoulli–Euler beam. A FE model is generated by simulating the region between the two adjacent floors with classical beam elements having uniform thicknesses. This leads to 76 numbers of translational and rotational DOFs each. Static condensation technique is used to eliminate the 76 rotational degrees of freedom, resulting in 76 translational DOFs. These 76 DOFs represent the displacement of each floor in the lateral direction. The first five natural frequencies are computed as 0.16, 0.765, 1.992, 3.792 and 6.398 Hz. The first ten modes with 1% damping ratio are used to evaluate the damping matrix of size 76 × 76. The time history responses of the model are computed using Newmark-Beta method.
In Fig. 1a, the acceleration response of the structure at the top floor and its corresponding Fourier spectrum is shown. Since these are computed responses, to simulate experimentally measured data, we corrupt the computed time history responses with varying levels of Gaussian white noise. We accomplish this by adding noise directly to the computed responses. Accordingly, the acceleration responses, \(\ddot{z}^{k}\) used in the SOBI based modal estimation algorithm can be written as
where \(\ddot{z}^{k}\) is the time history response vector used for modal parameter estimation using the SOBI algorithm, \(\ddot{z}_{c}^{k}\) is the noise-free computed acceleration response, \(\sigma (\ddot{z}_{c}^{k} )\) is the standard deviation of \(\ddot{z}_{c}^{k}\), \(RND\) denotes random number between − 1 and + 1, \(\xi_{noise}\) is the noise level contamination parameter. In the present work, we have used noise levels varying from 5 to 15% in our modal parameter estimation studies presented in this paper using the SOBI algorithm. However, we have also used the noise-free measurements in our studies for the sake of comparison. Time history response at 22 other locations (i.e., 4th, 8th, 11th, 14th, 18th, 21st, 24th, 28th, 31st, 34th, 37th, 40th, 43rd, 47th, 50th, 53rd, 57th, 60th, 63rd, 67th, 70th, 73rd stories) is evaluated to construct the mode shapes using the SOBI based modal identification algorithm. The sampling frequency is taken as 600 Hz and the sampling period is taken as 400 s.

Response at 76th floor of the benchmark building. a Time History response, b Frequency Spectrum
It can be observed from Fig. 1b that, there are at least 10 dominant frequencies in the range of 0.15 Hz to 28 Hz (Fig. 2). The cross-correlated response of channel 23 (i.e.,top floor response) with the 17th channel as a reference is shown in Fig. 3.

Cross-correlated dynamic response of the 76th floor & corresponding Zoomed Fourier spectrum—76-story benchmark building

Fourier spectrum of the cross-correlated dynamic response at the 76th floor 76-story benchmark building
The free responses obtained from the cross-correlated response using the appropriate bandpass filters are shown in Fig. 4. The mode shapes are constructed using the spatial data from all channels as discussed in Sect. 3. The first ten estimated modes of the structure are shown in Fig. 5. The theoretical mode shapes obtained through finite element (FE) simulations are also shown in Fig. 5, for comparison. We can notice from these plots that the constructed mode shapes using the proposed technique are comparing well with their corresponding FE evaluated mode shapes. A similar procedure is repeated with varying noise levels and the modal parameters obtained using the proposed method are shown in Table 1. Based on these tabulated modal parameters it can be concluded that the accuracy of the SOBI based modal parameter estimation method is extremely good. However, the accuracy of the estimated damping ratios seems to be degrading with the increase in the measurement noise.

Typical Free response at the 76th floor −76 story benchmark building

Mode shapes of the 76th-story building obtained using SOBI based modal identification algorithm
Experimental Verification
The multipurpose observation tower at Haizhu District of Guangzhou, China, popularly known as Guangzhou New TV Tower (GNTVT) is 610 m high including the mounted antenna. It is built with two concentric tubes of elliptic shape as shown in Fig. 6. The height of the main tower is 454 m and 146 m high antenna mast is mounted over it. The inner structure of the main tower is constructed of reinforced concrete and the outer structure is a steel lattice. The cross-section of the inner structure is of size 14 m × 17 m and is elliptical in shape and the dimensions of the cross-section are constant all through the height. In contrast, cross-section of the outer structure, which is also the elliptical in shape, varies with height. At the ground level, the cross-section is 50 m × 80 m and it gradually reduces to 20.65 m × 27.5 m at 280 m high (i.e., the waist level). From this waist level, the elliptical cross-section gradually increases while moving toward the top of the tower. The cross-section at the top of the main tower i.e., at 454 m height is 41 m × 55 m. The antenna mast is a spatial structure and its cross-section is octagonal in shape. It is made up of steel and the maximum diagonal of this octagonal cross-section is 14 m. This 146 m high antenna mast mounted over the Elliptical tower as shown in Fig. 6.

The Guangzhou New TV Tower in Guangzhou, China [27]
The acceleration time history data obtained from a sophisticated SHM system with twenty uni-axial accelerometers are used for modal identification in the present work. The Accelerometers are reported to have been installed at eight levels as shown in Fig. 7a. Four accelerometers are reported to have been installed at 4th and 8th levels. While two of them are used for measuring the horizontal vibration along the long axis and rest of the two are used for measuring along the short axis. Figure 7b clearly shows the plan view of the positioning of these accelerometers and also the direction of acceleration measurement.

Ambient data measurement of Data acquisition system with accelerometers [27]. a Data acquisition system with accelerometers, b Channel labels & Direction of acceleration measured
A set of ambient vibration data, extracted from the health monitoring system installed on the GNTVT [41], and made publicly available through the internet is considered as field measurements for OMA. To remove the DC-components, which can adversely affect the modal identification process, de-trending of the measured data is carried out first and then modal parameter estimation. The sampling frequency of the measured responses is 50 Hz which can cover the frequency range of 0.1 Hz to 25 Hz. However, the tower under investigation is very tall and therefore first few frequencies lie within 2 Hz. Because of this resampling and filtering of the measured data from 50 to 5 Hz is carried out to effectively capture the frequencies in the range of 0.1 to 2.5 Hz. Measured time history response obtained from the tower and a typical cross-correlation response is shown in Fig. 8a and b respectively.

The measured time history response of GNTVT tower and typical cross-correlated response. a Typical acceleration time history, b Typical cross-correlated response
Modal parameters are extracted using 90 data sets and the mean values of natural frequencies, damping ratios are evaluated using the BSS-based modal identification algorithm. The mean values of natural frequencies and damping ratios obtained using the BSS-based algorithm are shown in Table 2. They are compared with the results of finite element analysis, NEXT-ERA, SSI, Vector Autoregressive models (ARV) and Extended Frequency Domain Decomposition algorithm (EFDD) available in the literature [41,42,43] and the results obtained using the present BSS-based algorithm found to be in good agreement (Fig. 9).

Mode Shapes of the GNTVT Tower obtained using SOBI based modal identification algorithm. a In X-Direction, b In Y-Direction
Conclusions
In this paper, blind source separation technique is employed for modal parameter estimation of operational tall structures using ambient vibration responses and this tool can be effectively used for online health monitoring. In this paper, SOBI is preferred for operational modal analysis of practical engineering structures due to its inherent advantages over the other popular BSS algorithms as detailed in the earlier sections.
The SOBI based modal parameter estimation technique requires only measured acceleration time history data at discrete locations and it works well for data with noise. The SOBI based modal estimation algorithm is initially tested with the synthetic data obtained from the 76-story benchmark building by adding varying levels of measurement noise. From the numerical investigations carried out on the 76-story tall structure, it can be concluded that the modal parameters can be estimated with very good accuracy using the SOBI based operational modal analysis technique. These modal parameters are found to be reasonably accurate even with high measurement noise. Hence, SOBI can be considered as an effective tool for modal parameter estimation of tall structures with ambient vibration data. Finally, the experimental verification of the SOBI based modal parameter estimation technique is carried out using the field data obtained from 610-m tall GNTVT tower and compared with the theoretical values obtained using finite element analysis and found to be in good agreement.
Data availability
Benchmark data Available.
Code availability
Custom Code Available.
References
C.S. Huang, C.H. Yeh, Some properties of randomdec signatures. Mech. Syst. Signal Process. 13(3), 491–506 (1999)
S.R. Ibrahim, R.S. Pappa, Large modal survey testing using the Ibrahim time domain identify technique. AIAA J. Spacecr. Rockets 19(5), 459–465 (1982)
H. Vold, R. Russell, Advanced analysis methods improve modal test results. Sound Vib. 17(3), 36–40 (1983)
T.Y. Liu, W.L. Chiang, C.W. Chen, W.K. Hsu, L.C. Lu, T.J. Chu, Identification and monitoring of bridge health from ambient vibration data. J. Vib. Control 17(4), 589–603 (2011)
J. Lardies, Modal parameter identification based on ARMAV and state-space approaches. Arch. Appl. Mech. 80(4), 335–352 (2010)
M.R. Ali, T. Okabayashi, System identification of highway bridges from ambient vibration using subspace stochastic realization theories. Earthq. Struct. 2(2), 189–206 (2011)
J.M. Caicedo, Practical guidelines for the natural excitation technique (NEXT) and the eigensystem realization algorithm (ERA) for modal identification using ambient vibration. Exp. Tech. 35(4), 52–58 (2011)
F. Ghrib, L. Li, An adaptive filtering-based solution for the Bayesian modal identification formulation. J. Civ. Struct. Health Monit. 17(1), 1–3 (2017)
D. Skolnik, Y. Lei, E. Yu, J. Wallace, Identification model updating and response prediction of an instrumented 15-story steel-frame building. Earthq. Spectra 22(3), 781–802 (2006)
P. Ni, J. Li, H. Hao et al., Time-varying system identification using variational mode decomposition. Struct. Control Health Monit. 25(6), 2175 (2018)
Y. Yang, Z. Peng, W. Zhang, G. Meng, Parameterised time-frequency analysis methods and their engineering applications: a review of recent advances. Mech. Syst. Signal Process. 119, 182–221 (2019)
S. Mahato, M.V. Teja, A. Chakraborty, Combined wavelet–Hilbert transform-based modal identification of road bridge using vehicular excitation. J. Civ. Struct. Health Monit. 17(1), 29–44 (2017)
S. Mahato, A. Chakraborty, Sequential clustering of synchrosqueezed wavelet transform coefficients for efficient modal identification. J. Civ. Struct. Health Monit. 9(2), 271–291 (2019)
Huang, N.E. Shen, Z. Long, S.R. Wu, M.C. Shih, H.H. Zheng, Q. Yen, N. Tung, C.C. and Liu, H.H. (1998). “The empirical mode decomposition and Hilbert spectrum for nonlinear and nonstationary time series analysis,, Proceedings of Royal Society, London, Ser. A. 454, 903–995
S. Mahato, M.V. Teja, A. Chakraborty, Adaptive HHT (AHHT) based modal parameter estimation from limited measurements of an RC-framed building under multi-component earthquake excitations. Struct. Control. Health Monit. 22(7), 984–1001 (2015)
J.N. Yang, A.K. Agrawal, B. Samali, J.C. Wu, Benchmark problem for response control of wind-excited tall buildings. J. Eng. Mech. 130(4), 437–446 (2004)
J.N. Yang, Y. Lei, S. Pan, N. Huang, System identification of linear structures based on Hilbert-Huang spectral analysis, Part 1: normal modes. Earthq. Eng. Struct. Dyn. 32, 1443–1467 (2003)
J.N. Yang, Y. Lei, S. Pan, N. Huang, System identification of linear structures based on Hilbert-Huang spectral analysis, part 2: complex modes. Earthq. Eng. Struct. Dyn. 32, 1533–1554 (2003)
J.N. Yang, Y. Lei, N. Huang, Identification of natural frequencies and damping of in situ tall buildings using ambient wind vibration data. J. Eng. Mech. ASCE 130(5), 570–577 (2004)
J. Lardies, S. Gouttebroze, Identification of modal parameters using the wavelet transform. Int. J. Mech. Sci. 44(11), 2263–2283 (2002)
B. Yan, A. Miyamoto, A comparative study of modal parameter identification based on wavelet and Hilbert-Huang transforms. Comput. Aided Civ. Infrastruct. Eng. 21(1), 9–23 (2006)
C.H. Chen, C.I. Ou, Experimental model test and time-domain aerodynamic analysis of a cable-stayed bridge. Int. J. Struct. Stab. Dyn. 11(1), 101–125 (2011)
C.S. Huang, W.C. Su, Identification of modal parameters of a time-invariant linear system by continuous wavelet transformation. Mech. Syst. Signal Process. 21(4), 1642–1664 (2007)
W. Zhou, D. Chelidze, Blind source separation based vibration mode identification. Mech. Syst. Signal Process. 21(8), 3072–3087 (2007)
A. Hyvarinen, J. Karhunen, E. Oja, Independent Component Analysis (Wiley, New York, 2001).
Tong, L. Soon, V.C. Huang, Y. and Liu, R. (1990). AMUSE: a new blind identification algorithm. In: Proceedings of IEEE ISCAS, (Vol. 3, pp. 1784–1787), New Orleans
A. Belouchrani, K. Abed-Meraim, J. Cardoso, E. Moulines, A blind source separation technique using second-order statistics. IEEE Trans. Signal Process. 45(2), 434–444 (1997)
Y. Yang, S. Nagarajaiah, Time-frequency blind source separation using independent component analysis for output-only modal identification of highly damped structures. J. Struct. Eng. ASCE 139, 1780–1793 (2013)
J. Antoni, S. Chauhan, T. Monnier, K. Gryllias, Least action criteria for blind separation of structural modes. Mech. Ind. 14(6), 397–411 (2013)
Sadhu, A. (2013). Decentralized ambient modal identification of structures (Doctoral dissertation. PhD Thesis, Department of Civil and Environmental Engineering, University of Waterloo, Canada)
B. Hazra, A.J. Roffel, S. Narasimhan, M.D. Pandey, Modified cross-correlation method for the blind identification of structures. J. Eng. Mech. 136(7), 889–897 (2010)
C. Rainieri, Perspectives of second-order blind identification for operational modal analysis of civil structures. Shock Vib. (2014). https://doi.org/10.1155/2014/845106
B. Hazra, A. Sadhu, A.J. Roffel, S. Narasimhan, Hybrid time-frequency blind source separation towards ambient system identification of structures. Comput-Aided Civ. Infrastruct. Eng. 27(5), 314–332 (2012)
Yang, Y. (2014). Harnessing data structure for health monitoring and assessment of civil structures: Sparse representation and low-rank structure. PhD thesis, Department of Civil Engineering, Rice University, USA
P. Bofill, M. Zibulevsky, Underdetermined blind source separation using sparse representations. Signal Process. 81(11), 2353–2362 (2001)
J. Antoni, S. Chauhan, An alternating least squares (ALS) based blind source separation algorithm for operational modal analysis, in Modal analysis topics, vol. 3, ed. by R. Allemang, J. de Clerck, C. Niezrecki (Springer, New York, 2011), pp. 179–187
S. McNeill, A modal identification algorithm combining blind source separation and state-space realization. J. Signal Inf. Process. 14, 173–185 (2013)
J. Antoni, S. Chauhan, A study and extension of second-order blind source separation to operational modal analysis. J. Sound Vib. 332(4), 1079–1106 (2013)
A. Sadhu, S. Narasimhan, J. Antoni, A review of output-only structural mode identification literature employing blind source separation methods. Mech. Syst. Signal Process. 94, 415–431 (2017)
K. Lakshmi, A multi-model based approach for the detection of subtle structural damage considering environmental variability. Int. J. Struct. Stab. Dyn. 20(03), 2050038 (2020)
W.H. Chen, Z.R. Lu, W. Lin, S.H. Chen, Y.Q. Ni, Y. Xia, W.Y. Liao, Theoretical and experimental modal analysis of the Guangzhou New TV tower. Eng. Struct. 33(12), 3628–3646 (2011)
Y. Niu, P. Kraemer, C.-P. Fritzen, (2011). Operational modal analysis for the Guangzhou New TV Tower, in Civil engineering topics, vol. 4, ed. by T. Proulx (Springer, New York, 2011), pp. 211–220
L. Faravelli, F. Ubertini, C. Fuggini (2010) Subspace identification of the Guangzhou New TV tower. In: Proceedings of 5th World Conference on Structural Control and Monitoring, 5WCSCM-068
Acknowledgements
The authors acknowledge the financial support of NPMASS, ADA, Bangalore. This paper is being published with the permission of The Director, CSIR-Structural Engineering Research Center, Taramani, Chennai, Tamilnadu, India.
Funding
The authors acknowledge the financial support of NPMASS, ADA, Bangalore.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Lakshmi, K., Reddy, V.K. & Rao, A.R.M. Modal Identification of Practical Engineering Structures using Second-Order Blind Identification. J. Inst. Eng. India Ser. A 102, 499–512 (2021). https://doi.org/10.1007/s40030-021-00523-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40030-021-00523-2