
Abstract
In case of a non-lane based heterogeneous traffic flow, the vehicle driver’s behavior becomes one of the major considering aspects for proper traffic maneuverability. In the present study, microscopic simulation model has been used, as it contains abundant autonomous parameters to illustrate the features of traffic flow, behavior of drivers and traffic regulatory processes. The present traffic simulation model follows two modified models based on vehicle following theories and behaviors as modified by Wiedemann. A driver in the micro-simulation model considers the preceding vehicle as well as neighboring lane vehicles in a traffic stream. The methodological description of a vehicle technically, behavior and interdependency of a driver and a vehicle as a unit is attributes of a driver and his or her vehicle in a traffic stream. Thus, hysteresis plots of relative speed against relative distance are made for aggregated leader and follower vehicles of each vehicle type based on follower vehicular category to get the calibrated coefficient of correlation parameters (CC). A new simulation model with calibrated CC parameters is made to get a realistic capacity estimate of different multilane highways in Indian conditions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The multilane highways are high speed roads with high traffic volume that provide unhindered traffic movement and better connectivity to various places of importance in a country. In most of the multilane interurban highways of India, the share of non-motorized traffic has become insignificant. However, the characteristics of motorized traffic on the above class of highways continue to be diverse in nature due to the fact that the motorized two wheelers and three wheelers (possessing varying size and speed characteristics) share the same road space with other vehicle types like cars, buses and varying types of goods vehicles. This situation arises due to the reason that there is no centralized monitoring system over the traffic movement and the drivers of the vehicles are also not educated enough to understand the importance of moving in a particular lane for a better traffic flow. This notable difference in the nature of the traffic flow requires detailed studies of the microscopic behavior of stochastic traffic of Indian multilane highways. The non-lane based vehicular movement increases the importance of leading vehicles as the follower vehicle has to adopt the situation with respect to the leader vehicle, so a thorough vehicle to vehicle interaction becomes important in this scenario. As traffic capacity is a major parameter for planning, analysis and design of a multilane highway by considering the traffic characteristics, so the estimation of capacity of multilane highways is necessary. Thus, the present study deals with the capacity estimation of multilane highways by using a microscopic simulation tool that considers a car following model with various driver behavior parameters.
Review of Earlier Studies
The highway capacity of a region carrying mixed traffic flow can be best evaluated from fundamental relationships of traffic flow that is speed, flow and density of a traffic stream. The individual vehicle factors such as individual speed, braking efficiency, driver’s behavior can have effects on the safety and capacity of a roadway other than exterior influencing factors. The response of a subsequent vehicle behind a vehicle moving in front depends on the relative speed between the two vehicles [1]. Different thresholds of perception and driving regimes were developed by them that control the activities of the driver in a subsequent vehicle in a traffic stream. On the basis of this conception, Wiedemann 74 model for urban roads [2, 3] and Wiedemann 99 model for freeways [4] were developed. Some adjustment of the constraints was done on behavior of vehicle drivers in VISSIM by doing sensitivity analysis of replicated traffic capacity [5]. For every constraint involving the behavior of driver, disparity in replicated traffic capacity was distinguished as the specific constraint was revised. The scrutiny of respective constraint was accomplished with entire constraints excluding the constraint in scrutiny incarcerated at their standardized values. Calibration at microscopic and macroscopic level was done for a model that considered psychological as well as physical behavior of driver in a vehicle following mode [6]. Wiedemann 99 model was calibrated at different flow levels on a road section, and comparison of macroscopic plots through simulation was done. The speed-flow equations were developed from free speed profiles for different vehicle types on diverse multilane highways by traditional methods as well as simulation technique through VISSIM software so that realistic calculation of capacity of highways having varied number of lanes with mixed nature of flow of traffic can be done [7]. The process of simulation for representing vehicular movement on Indian expressways was carried out to assess the traffic capacity on expressways by considering the consequence of proportions of vehicles on the passenger car equivalencies. The outcomes showed decreasing values for rise in the ratio of traffic volume to traffic capacity regardless of the class of vehicles [8]. The process of calibration of micro-simulation software VISSIM was done by developing a methodology for mixed traffic conditions having various vehicles with changing composition and the absence of proper lane discipline [9]. Adjustments of the behavior of drivers in mixed traffic were done along with the identification of parameters for calibration purpose. The flow of traffic on Indian urban expressways was modeled to evaluate traffic capacity with the help of micro-simulation software VISSIM. The data on various flow characteristics of traffic collected from the expressway was used for proper authentication and justification of the model on simulation. Ultimately, it was concluded to do a relative evaluation on enumerating level of interface amid diverse vehicle categories by utilizing vehicular speed and area occupied by vehicles [10]. Wiedemann’s vehicle following model was calibrated by the use of varied pair of vehicle interactions [11]. The spacing between individual vehicles, variation in speed, time gap and acceleration through various driving situations mainly for cars and heavy vehicles was controlled in the work by the parameters of Wiedemann 99 model. The validation of parameters that gave better simulation results of cumulative speed, and acceleration distribution was done.
Objective
-
To estimate capacity of divided highways of four-lane, six-lane and eight-lane carrying heterogeneous traffic in Indian conditions by developing fundamental relationship of traffic flow (speed-flow-density).
-
To use microscopic simulation software VISSIM with calibrated and validated field data on various characteristics of traffic stream, as it can consider detailed individual characteristics of vehicles and drivers to get more accurate value of capacity.
-
To calibrate driver behavior model parameters for emulating mixed traffic conditions of multilane highways.
Collection of Data
The sections chosen in the current work are at NH-45 at chainage 98 + 400 near Acharapakkam (Chennai-Villupuram Highway in Tamil Nadu), NH-8 at chainage 52 + 62 (towards Ahmadabad in Gujarat) and Nehru Outer Ring Road at chainage152 + 00 (towards Gacchibowli in Hyderabad). The section of NH-45 is a divided four lane National Highway having each 3.5 m wide lane, the section of NH-8 (ch. 52 + 62) is six lane divided National Highway with 12.48 m width of carriageway on either side, while the section of Outer Ring Road encircling the Hyderabad city with chainage (152 + 00) is an interurban eight lane divided expressway with each 3.5-m wide lane having a straight section for traffic study. The geometry of the sections is straight and level with 1.5 m paved shoulder along with 1 m earthen shoulder for NH-45 at chainage of 98 km 400 m, 1.1 m paved shoulder along with 1.3 m morrum shoulder for NH-8 at chainage of (52 + 62). The prevalent weather condition for data collection were sunny without any rainfall. The speed-volume data was mainly collected by videography method for a trap length of 75 m for NH-45, 100 m for the section of NH-8 and 85 m for Outer Ring Road, physically marked with the help of white paint and traffic cones. Table 1 demonstrates the particulars of traffic volume and composition on different highways considered for the present study.
The speed of individual type of vehicles is measured by scheming the required time of a vehicle to traverse the entrapped span by means of a stop watch with minute precision. The speed data are converted into frequency tables, and then cumulative frequency curves are plotted by taking a suitable class interval. The cumulative speed profile of each vehicle type and speed-density relation for NH-45 are represented in Figs. 1 and 2, respectively and hourly variation of traffic volume on NH-8 is shown in Fig. 3, while the speed profile, speed-density relation and hourly variation of traffic volume for the other two highways is also determined.

Cumulative speed profiles on NH-45

Speed-density relation for a section at ch. (98 + 400) on NH-45

Hourly variation of traffic volume at ch. (52 + 62) on NH-8
Capacity Estimation Model
Model Methodology
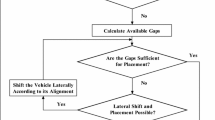
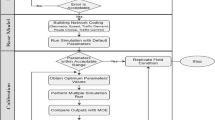
The methodology of the present study initiated with the selection of study sections and data collection of free-flow mixed traffic by video graphic techniques. Then, the video graphic data have been extracted and analyzed extensively to get the traffic composition of the study sections, along with speed distribution, traffic volume and traffic density values. These values were used as basic parameters for capacity estimation of the multilane highways selected for the present study by using Greenshield’s linear model and also as input parameters for preparation of microscopic simulation model with VISSIM [12] tool. The parabolic speed-flow model is developed from the said linear model and basic relation of speed, flow and density. From the speed-flow model, it can be perceived that speed starts to reduce steadily with respect to mean free speed as flow raise on the segment until it reaches its maximum value which is referred to as the capacity of that road segment. Thereafter, flow decreases subsequently with reduction in speed and finally it meets the jam density condition where both speed and flow are found to be zero. In this regard, the heterogeneous traffic volume measured at every 5 min interval were converted to traffic flow values by utilizing the passenger car units (PCU) of varied vehicle types [13, 14]. A particular methodology is adopted to evaluate the dynamic PCU values [15] for dissimilar vehicles types on the divided highways of the current work, in which the PCU values are calculated by finding the ratio between vehicular speed to physical rectangular area and the values are shown in Table 2. It is observed from Table 2 that the PCU values for vehicle types like Bus, LCV, HCV and MAV are quite high for all the roads considered for the present study, due to the fact that the difference in speed between the said vehicular types and standard cars moving on those roads is high. The microscopic simulation tool used in the present study is a multi-modal time increment concerned, and conduct-based imitation device for demonstrating city and rural traffic along with pedestrian movements. The said tool can efficiently simulate varied sorts of vehicles and has the ability to display and visualize the complex traffic flow operations in a graphical manner with the degree of precision. The model utilizes every time step to identify an opportunity for each vehicle within a network system. The model assigns specific driver behavior characteristics to each vehicle on network and simulate the ‘driver-vehicle-unit’ as a single entity at every small-time step. The coefficient of correlation (CC) parameters in VISSIM that depends on driver’s vehicle following characteristics are changed according to the field data to get realistic simulation results. From the traffic data extracted from every road segment of the current work, the time headway and space headway have been calculated for individual vehicles to get the value of relative distance. The time headway has been calculated from the difference in entry time to a trap length on the road section between two consecutive vehicles then, the time headway is multiplied by the speed of the vehicle to get the space headway. The difference between the space headway values of consecutive vehicles give the value of relative distance, while the difference in speed values between consecutive vehicles give the value of relative speed of individual vehicles Hysteresis plot has been done with relative speed (X-axis) against relative distance (Y-axis) for each vehicle category moving in the selected section of multilane highways considered in the present study. The values of relative velocity and relative distance are taken from hysteresis plots particularly for the vehicles maintaining time headway of 8 s or more, as mentioned in Highway Capacity Manual of India [16] that a vehicle traveling with headway 8 s or more is considered as free flowing. From the hysteresis plots, the coefficient of correlation (CC) parameters was calculated. With the changed CC parameters, the simulation was run and the result for both the calibrated parameter values and default values has been analyzed.
Identification and Selection of Driver’s Following Behavior Parameters
In this study, Wiedemann’s psycho-physical models are used to calibrate the following nature of vehicles. The basic idea of the Wiedemann model is the assumption that a driver can be in one of four driving modes of free driving, approaching, following and braking. The diagram of the psycho-physical Wiedemann’s model is represented in Fig. 4 with a plot of relative speed (∆V) against relative distance (∆X).

Wiedemann car following model [19]
Some of the notations used in the figure are illustrated below:
-
(1)
AX: It is the minimum distance headway in a standstill condition that is the preferred space in a queue between the frontages of two consecutive vehicles.
-
(2)
ABX: It is the minimum preferred subsequent space to avoid collision. It is a function of AX and a safety distance BX as shown in Eq. (1).
$$ {\text{ABX}} = {\text{AX}} + {\text{BX}} $$(1)where BX = (BXadd + BXmult*RND1)*√V. Here, BXadd and BXmult are calibration parameters, RND1 is a normally distributed driver-dependent parameter and V is the speed of the slow moving vehicle.
-
(3)
SDX: It is the maximum preferred following distance with usual value of 1.5–2.5 times the value of ABX.
-
(4)
SDV: It is the threshold of a driver to recognize that he is approaching a slower vehicle. In the original work of Wiedemann [2], an additional threshold CLDV is applied to model additional deceleration by usage of the brakes with a larger variation than SDV.
-
(5)
OPDV: It is the threshold for speed difference in an opening process during a following condition. The variation of OPDV is large compared to CLDV. The following formula of the model as shown in Eq. (2) is used in the current work for determination of the coefficient of correlation parameters from the hysteresis plots as explained later.
The Wiedemann 99 model is also very much effective as a vehicle following model and is efficiently utilized in the present study to find out different parameters related to drivers’ car following behavior. The sensitivity of Wiedemann 99 model parameters is investigated by taking simulated capacity as a measure of effectiveness. Out of the ten CC parameters, six (CC0, CC1, CC2, CC3, CC4, CC5) have been selected in the current work for making a model on simulation of heterogeneous traffic as they are concerned with standstill distance, time headway, space and speed variation that can all be calculated from Fig. 1 as explained in the next article. The other four parameters (CC6, CC7, CC8, CC9) are not considered for testing their influence on simulated capacity values as they represent very typical behavior of a driver either in car following or in free-flow conditions. The greater value of CC6 indicates that vehicle drivers are not much subtle to previous vehicle’s speeding up or slowing down rates and their speeds differ further meaningfully throughout the insentient vehicle following procedure. As there is no appropriate indication of description for CC6, so the defaulting value is taken in the current work. Due to the absence of data for acceleration at oscillation, standstill and at 80 kmph speed, the default values of all the parameters (CC7, CC8, CC9) are considered in the present work.
Calibration and Validation of the Driver’s Following Behavior Parameters
The yield of simulation model sometimes results in impractical values if the model is not properly calibrated and validated. Thus, calibration and validation of simulation models are essential steps in assessing their value in different policies, planning and operations in the field of transportation engineering [17]. The calibration of model is defined as the procedure by which every distinct components of the simulation model are attuned so that the model can precisely characterize the observed traffic conditions measured in the field. The sensitivity of the driver’s following behavior parameters is investigated by taking simulated capacity as a measure of effectiveness. In the current work, the optimal value of parameters of Wiedemann 99 model is considered in the way that CC0 is measured as the standstill distance among the vehicles that is considered from standardized Wiedemann 74 model. After that by the assistance of Solver Tool in Microsoft Excel, the improved worth of CC1 is considered. Then, from the relative distances as obtained from the field data, cumulative percentage plots are developed for calculating the value of CC2. Based on the plots, the 50th and 25th percentile values of CC2 are initially tried as a zone of following. It is seen from the results that out of these two percentile values, the 25th percentile value is yielding good results in all the three selected road sections. The parameter CC3 is demarcated as the perception verge when leader starts to slow down, but as it is very difficult to calculate this limit, so it is assumed as a straight line and the slope of the line is taken as CC3. The parameters CC4 and CC5 are likewise designed from the hysteresis plots, nevertheless considering all the hysteresis loops for recognizing CC4 and CC5 and similarly considering the supreme standards may not result in setting the threshold standards, so 25th percentile value of cumulative percentage plots is taken as the accepted value of the study for CC4 as also CC5. The calibrated values of the CC parameters depending on the field data are shown below in Table 3 for different vehicle categories moving in three different road sections.
Six (CC0, CC1, CC2, CC3, CC4, CC5) out of ten parameters have shown significant effect on capacity estimation for four, six and eight lane divided highways. So, the sensitivity of the parameters in combination is done by two-way analysis of variance (ANNOVA) to see whether any change in parameter value from its default value has effect on simulated capacity at 5% level of significance. As the p-values are lower than the critical value of 0.05, thus, it indicates that the change in the default values of the parameters provide significant change in the value of simulated capacity. The p-values of each vehicle category for the three road sections are shown in Table 4.
The simulation was run with the changed values of six (CC0 to CC5) parameters of Wiedemann-99 model for each of a four lane (NH-45), six lane (NH-8) and eight lane (Outer Ring Road) divided highway and a capacity value obtained having a variation o ± 5% with the estimated capacity of the traditional model [18], proved a realistic estimation of capacity by traffic simulation.
To check the temporal validity of the new simulation model, an assessment of the observed and simulation flow values has been done at 15 min and 30 min interval of flow of traffic for an entire period of 4 h. The details of the statistical validation through the paired t-test are represented in Table 5. The results showed that the values of estimated t-statistic are lesser than the t-critical values for t-test and the p-value is more than 5% level of significance. Thus, it can be concluded that there is no statistically significant difference between the observed and simulated traffic capacity of the three multilane highways considered in the present study.
Another technique is adopted to check the statistical validation of the observed and simulated traffic movement values by F-test (two samples for variances). The estimated F value, p value and F-critical standards attained from typical F-test are represented in Table 6 for 5% level of significance that is 95% confidence level, alongside their individual degrees of freedom. As of the results, it is seen that in every instance, the F value is lesser than the F-critical values for F-test and the p-value is more than 5% level of significance. Therefore, it is resolved that there is no statistically substantial variance among the observed and simulated traffic capacity of the multilane highways considered in the present study.
Results
The capacity analysis from the speed-density relationship (as per the Greenshield’s linear model) [18] for three different sections has been done by plotting the speed-flow curves from the data generated (both observed and simulated) from speed-density relation. The capacity estimated by traditional method and simulation method for three different sections of National Highways in India in the present study is shown in Table 7.
Conclusion
As discussed in the earlier sections, six parameters of the driver’s car following behavior model were changed to get a realistic capacity value by the simulation method. In the present work, the simulated capacity estimated for the three highway sections NH-45 (ch. 98 + 400), NH-8 (ch. 52 + 62) and Outer Ring Road (ch. 152 + 00) are found to vary by 4.73%, 1.36% and 1.72%, respectively, from the traditional capacity values. As these values are all within the range of ± 5% from the traditional capacity values, so the simulation values imply realistic estimation of heterogeneous traffic data. The capacity estimated for the three sections by both the methods in the present study are close to the capacity values suggested by Indian Highway Capacity Manual, 2018 [16], where the base capacity values for four lane and six lane divided highway segments vary from 3640 to 4540 PCU/h and 5500 to 6790 PCU/h, respectively, for operating speed varying from 70 to 100 kmph, while for eight lane divided expressways, the capacity is 9200 PCU/h. This variation in calculated capacity from those mentioned in Indian Highway Capacity Manual is obtained due to higher PCU values and operating speeds of the vehicles in the present study. Thus, the simulation model prepared for simulated capacity estimation provides realistic capacity values with the change in six parameters of driver’s behavior in car following model, which proves the proper calibration and correct validation of the coefficient of correlation (CC0 to CC5) parameters of Wiedemann 99 car following model of VISSIM. Hence, driver’s behavior in a heterogeneous traffic flow is a vital issue to be considered for capacity estimation of multilane highways particularly in Indian condition for the diversity of road traffic.
References
R. Wiedemann, U. Reiter, Microscopic traffic simulation: the simulation system mission, background and actual state. CEC Project ICARUS (V1052) Final Report, vol 2, Appendix A. Brussels, CEC (1992)
R. Wiedemann, Simulation des Straßenverkehrsflusses. Schriftenreihe des Instituts für Verkehrswesen der Universität Karlsruhe, Heft 8 (1974)
R. Wiedemann, Modeling of RTI-Elements on Multi-Lane Roads. Advanced Telematics in Road Transport, Commission of the European Community. DG XIII, Brussels (1991)
K. Aghabayk, M. Sarvi, W. Young, L. Kautzsch, A novel methodology for evolutionary calibration of VISSIM by multi-threading. Proc., Australasian Transport Research Forum (2013), pp. 1–15. https://dx.doi.org/10.1080/19427867.2016.1190887
N.E. Lownes, R.B. Machemehl, Sensitivity of simulated capacity to modification of VISSIM driver behavior parameters. Journal of the Transportation Research Board, No. 1988, Transportation Research Board of the National Academies, Washington DC (2006), pp. 102–110
S. Menneni, C. Sun, P. Vortisch, An integrated microscopic and macroscopic calibration for psycho-physical car following models. Proc., 88th Transportation Research Board Annual Meeting, Washington DC (2009). https://doi.org/10.1016/j.trc.2016.02.012
S. Velmurugan, M. Errampalli, K. Ravinder, K. Sitaramanjaneyulu, S. Gangopadhyay, Critical evaluation of roadway capacity of multi-lane high speed corridors under heterogeneous traffic conditions through traditional and microscopic simulation models. J. Indian Roads Congr. 71(3), 235–264 (2010)
M.S. Bains, B. Ponnu, S.S. Arkatkar, Modeling of Traffic Flow on Indian Expressways using Simulation Technique. 8th International Conference on Traffic and Transportation Studies Changsha, China, Elsevier, 1–3 August 2012
P. Manjunatha, P. Vortisch, T. Mathew, Methodology for the calibration of VISSIM in mixed traffic. Proc., 92nd Transportation Research Board Annual Meeting, Washington DC (2013)
S. Arkatkar, S. Velmurugan, R. Puvvala, B. Ponnu, S. Narula, Methodology for simulating heterogeneous traffic on expressways in developing countries: a case study in India. Int. J. Transp. Res. 8(2), 61–76 (2015)
U. Durrani, C. Lee, H. Maoh, Calibrating the wiedemann’s vehicle-following model using mixed vehicle-pair interactions. Transp. Res. Part C, ASCE 67, 227–242 (2016). https://doi.org/10.1016/j.trc.2016.02.012
Planning Transport Verkehr VISSIM, Users Manual, Version 6 (Planning Transport Verkehr VISSIM, Karlsruhe, 2013)
S. Chandra, P.K. Sikdar, V. Kumar, Dynamic PCU estimation of capacity on urban roads. J. Indian Roads Congr. 23, 17–28 (1995)
S. Chandra, Capacity estimation procedure for two lane roads under mixed traffic conditions. J. Indian Roads Congr. 165(1), 139–170 (2004)
S. Chandra, U. Kumar, Effect of lane width on capacity under mix traffic conditions in India. J. Transp. Eng. ASCE 155, 155–160 (2003)
CSIR- Central Road Research Institute, Indian Highway Capacity Manual (Indo-HCM), 1st edn. (CSIR- Central Road Research Institute, New Delhi, 2018)
M. Fellendorf, P. Vortisch, Validation of the microscopic traffic flow model VISSIM in different real-world situations. Proc., 80th Annual Meeting of Transportation Research Board, Washington DC (2001)
B.D. Greenshields, A study of traffic capacity. Proc., Highway Research Record Board, vol 14 (1934), pp. 448-477
N. Raju, S.S. Arkatkar, G. Joshi, Modeling following behavior of vehicles using trajectory data under mixed traffic conditions: an Indian viewpoint. Int. J. Transp. Res. (2020). https://doi.org/10.1080/19427867.2020.1751440
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ghosh, T., Roy, S.K. & Gangopadhyay, S. Assessment of Multilane Highway Capacity Through Simulation Process by Considering the Effect of Behavior of Driver of a Vehicle. J. Inst. Eng. India Ser. A 101, 589–596 (2020). https://doi.org/10.1007/s40030-020-00475-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40030-020-00475-z