
Abstract
In this paper, the asymptotic behavior of solutions for a class of non-autonomous third order neutral delay differential equations is studied. Results on the stability, the boundedness and the square integrability of solutions and their derivatives are obtained. An example to illustrate the results is included.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Over the last several years, a great interest has been given to the asymptotic behavior of various classes of third-order differential equations [4, 7, 8, 17,18,19,20,21]. Being aware of the practical importance of third-order differential equations, the area of qualitative theory for such equations has attracted a large portion of research interest in the last decades. Neutral differential equations are differential equations in which the delayed argument occurs in the highest derivative of the state variable. These equations appear often in the modeling of networks containing lossless transmission lines [7, 8].
Based on the Lyapunov functional approach, we give new results on asymptotic behavior for some neutral differential equations. Precisely, sufficient conditions are given for the stability and square integrability of solutions for the following neutral delay differential equation
for all \(t\ge t_1= t_0+\sigma \), and \(0<\rho <1\). The functions \(p(t),\ q(t),\ f(x(t),x'(t))), g(x(t),x'(t)) \) and h(x(t)) are continuous in their respective arguments with \(h(0)=0\). In addition, it is also supposed that the derivatives \(f_u(u,v)=\frac{\partial f}{\partial u},p^{\prime }(t),q^{\prime }(t),q^{\prime \prime }(t)\) exist and are continuous.
By a solution of (1) we mean a continuous function \(x : [t_x,\infty )\rightarrow {\mathbb {R}}\) such that \(x(t)+\rho x(t-\sigma )\in C^3([t_x,\infty ),{\mathbb {R}})\) and which satisfies (1) on \( [t_x,\infty )\).
The paper structure is as follows: In Sect. 2, we give stability results. In Sect. 3, we verify the stability result throughout an example. Finally, Subsections of Sect. 4 are devoted to the study of boundedness and square integrability of solutions.
2 Asymptotic stability
Asymptotic stability of solutions to Eq. (1) will be studied in the case \(e(t)=0\). Before proceeding further, we start by making some assumptions and notations. Suppose there exist positive constants \(p_i\), \(q_i\), \(f_i\), \(g_i\), \(h_i\), L and \(\alpha \) for \(i=0,1\), such that the following conditions are satisfied :
-
(i)
\( {\left\{ \begin{array}{ll} 0<p_0\le p(t)\le p_1,\;-L\le p^{\prime }(t)\le 0,\\ 0<q_0\le q(t)\le q_1;\;-L\le q'(t)\le 0; \end{array}\right. }\)
-
(ii)
\(0<f_0\le f(u,v)\le f_1,\;vf_u(u,v)\le 0,\;0<g_0\le g(u,v)\le g_1\);
-
(iii)
\(|h'(u)|\le h_1\), for all u and \(\frac{h(u)}{u}\ge h_0\) for all \(u\ne 0\);
-
(iv)
\(2p_1h_1<\alpha <\frac{f_0}{2}\);
Define for each solution x(t) of (1) the equations:
and
Also, to ease exposition of the paper, we make use of the following notation
and
which allows us rewrite Eq. (1) as the equivalent system
It can be seen from system (4) that
and
Now, we will give our main result on the asymptotic stability of solutions for system (4) :
Theorem 1
In addition to assumptions \((i)-(iv)\), assume the following hold :
-
1.
\(a+\rho r_1^2(2L(1+\rho )+h_1+r_1(1+\rho ))+\rho r_{1}L\left( f_{1}+g_{1}-\alpha \right) -2\alpha g_{0}<0,\)
-
2.
\(b+\rho r_1^2(\left( f_{1}+g_{1}-\alpha \right) + r_{1}\left( 1+\rho \right) )+2r_0^2\left( \alpha -f_{0}\right) <0.\)
Then the trivial solution of (4) is asymptotically stable.
Proof
Define a Lyapunov function W(t, x, y, z) by
where
Here, \(\gamma _0\) and \(\gamma _1\) are positive constants to be determined later in the proof.
The first step is to show that V defined by (5) is positive definite. It is easy to see that \(V(t,0)=0\). Recall that
In view of conditions (i), (iii) and (iv),
Hence
Since
we have
Therefore
Using (7), (8) and the fact that \(\gamma _0\int _{t-\sigma }^{t}y^{2}(s)ds+\gamma _{1}\int _{t-\sigma }^{t}z^{2}(s)ds\ge 0\), it follows that
where \(k_0=\frac{1}{2}\min \left\{ h_{0}(\alpha -2p_{1}h_{1}),\frac{p_0}{2},\frac{\alpha (f_0-2\alpha )}{2},\frac{p_0^2}{2}\left( 1+\frac{ f_0-2\alpha }{2f_0}\right) \right\} .\)
It is clear that
and
By condition (i), we conclude that
where \(k=k_0\cdot \exp {\left( \frac{1}{\omega }\left( p_0-p_1+q_0-q_1 \right) \right) }\).
This shows that W is positive definite.
The next step is to show that the derivative of (5) is negative definite. Differentiating (5) along trajectories of (4) gives
with
where
and
On applying conditions (ii) and (iii), we obtain
and
Developing the estimate (15) according to Eqs. (2), (3), and using the fact \(2|uv|\le (u^2+v^2)\), besides conditions \((i)-(ii)\), one get
Combining the estimates on \(U_1-U_3\), we get
where \(\xi =\frac{1}{2}\max \left\{ 2,h_1^2,2r_1^2(1+\rho )+r_1g_1(2+\rho )+r_1(f_1-\alpha ) \right\} \).
Putting
and
we get
Therefore, there exists a positive constant K such that
Finally, take \(\frac{1}{\omega }=\frac{\xi }{k_0}\), to get
From the properties of the Lyapunov function (5), namely (12) and (17), we conclude that the zero solution of the system (4) is asymptotically stable. This terminates the proof of Theorem 1. \(\square \)
3 Example
Consider the following neutral delay differential equation
Observing the functions over the Eq. (18), one can deduce the following
It is clear, from the relation of h(x), that \(h(0)=0\). Besides, since \(\displaystyle 0\le \frac{1}{ 10+\mid x\mid }\le 1,\) for all x, we have that
Moreover
Furthermore,
and for \(\rho =0.01\), we have
also

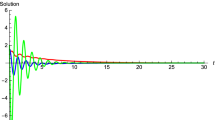
Numerical simulation of equation (18). \(\sigma =0.2\)
All the conditions of Theorem 1 hold, consequently the zero solution of (18) is asymptotically stable.
4 Square integrability
Our next results are stated with respect to \(e(t)\ne 0\), hence Eq. (1) is rewriten as the following equivalent system
4.1 Boundedness of solutions
The main result of this section is the following lemma :
Lemma 1
Besides conditions of Theorem 1 being satisfied, suppose there exists a positive constant \(e_1\) such that
-
(v)
\(\int _{t_1}^{t}|e(s)|ds<e_1\),
hold. Then, every solution of (19) satisfies
where N is a positive constant.
Proof
Over each solution (x(t), y(t), Z(t)) of (19), we have
From (17), we get
where \(N_1=\exp \left( \frac{2\xi }{k_0}(p_1+q_1)\right) \max \{\alpha ,p_1\}\).
In view of inequality (12) together with the fact \(|u|\le u^2+1\), we obtain
where \(N_2=\max \left\{ 2N_1,\frac{N_1}{k}\right\} \). Integrate from \(t_1\) to t to arrive at
Thus
Now, Gronwall inequality leads to
where \(N=(W(t_1)+e_1N_2)\exp \left( e_1N_2\right) \). This last inequality implies
therefore, the proof is complete. \(\square \)
4.2 Square integrability of solutions
Our main result in this section is stated in the following Theorem and make use of Lemma 1:
Theorem 2
If conditions of Lemma 1 hold, then
Proof
Define
where W is defined in (5) and \(\varepsilon \) is to be determined, Differentiating (24) along solutions of (19) and using (17) and (21), we obtain
Choosing \((\varepsilon -K)<0\) and using the fact that W(t) is bounded, we see that
for some constant \(N_{3}>0\). Integrating (25) from \(t_{1}\) to t and using (i), we obtain
That is, there exist positive constants \(M_1\) and \(M_2\) such that
Hence
Next, we show that \(\int _{t_{1}}^{t} x^{2}(u)du<\infty \). Multiplying (1) by x(t) and integrating from \(t_{1}\) to t, leads to
where
and
Integrate \(L_1\) by parts to get
By condition (i) and inequalities (20) and (26), we have
where \( \tau _1=p_{1}L(1+\rho )[2N^{2}+M_1]+p_{1}q_{1}(1+\rho )\left[ 2N^{2}+\frac{1}{2}(M_1+M_2)\right] \).
Next, by the use of inequality
we have
and by condition (ii) and inequality (26), we get
where \(\tau _2=f_1\sqrt{M_2}\). Similarly, we have
where \(\tau _3=g_1\sqrt{M_1}\). Finally, applying (v) and (20), we obtain
On the other hand, from condition (iii), we have
therefore,
Suppose
then dividing both ssides of (27) by \(\left( \int _{t_{1}}^{t} x^{2}(s)ds\right) ^{\frac{1}{2}}\) immediately implies a contradiction. This completes the proof of Theorem 2. \(\square \)
4.3 Example
Consider again the neutral delay differential equation defined by (18) and choose \(e(t)=\frac{1}{1+t^2}\ne 0\), namely
It is obvious that
hence, all conditions of Theorem 2 are satisfied, the conclusions follow.
References
Ademola, A.T., Mahmoud, A.M., Arawomo, P.O.: On the behaviour of solutions for a class of third order neutral delay differential equations. Anal. Univ. Oradea Fasc. Mate. Tom XXVI(2), 85–103 (2019)
Arino, O., Hbid, M.L.: Ait Dads. Springer, Delay Differential Equations and Application. NATO Sciences series. Berlin (2006)
Chatzarakis, G.E., Džurina, J., Jadlovská, I.: Oscillatory properties of third-order neutral delay differential equations with noncanonical operators. Mathematics 7, 1177 (2019)
Graef, J.R., Oudjedi, L.D., Remili, M.: Stability and Square Integrability of solutions to third order neutral delay differential equations. Tatra Mt. Math. Publ. 71(1), 81–97 (2018)
Graef, J.R., Beldjerd, D., Remili, M.: On stability, ultimate boundedness, and existence of periodic solutions of certain third order differential equations with delay. PanAmerican Math. J. 25, 82–94 (2015)
Graef, J.R., Beldjerd, D., Remili, M.: Some new stability, boundedness, and square integrability conditions for third-order neutral delay differential equations. Commun. Math. Anal. 22(1), 76–89 (2019)
Hale, J.K.: Theory of Functional Differential Equations. Springer, New York (1977)
Hale, J.K., Lunel, S.M.V.: Introduction To Functional-Differential Equations. Springer, New York (1993)
Kulenovic, M.R.S., Ladas, G., Meimaridou, A.: Stability of solutions of linear delay differential equations. Proc. Am. Math. Soc. 100, 433–441 (1987)
Khatir, A.M., Graef, J.R., Remili, M.: Stability, boundedness, and square integrability of solutions to third order neutral differential equations with delay. Rend. Circ. Mat. Palermo II Ser. 2019, 5 (2019). https://doi.org/10.1007/s12215-019-00438-9
Li, T., Rogovchenko, Y.V.: On the asymptotic behavior of solutions to a class of third-order nonlinear neutral differential equations. Appl. Math. Lett. 105, 106293 (2020)
Li, T.-X., Zhang, C.-H., Xing, G.-J.: Oscillation of third-order neutral delay differential equations. Abstr. Appl. Anal. 2012, 11 (2012)
Moaaz, O., Chalishajar, D., Bazighifan, O.: Asymptotic behavior of solutions of the third order nonlinear mixed type neutral differential equations. Mathematics 8, 485 (2020)
Moulai-khatir, A., Remili, M., Beldjerd, D.: Stability, boundedness and square integrability of solutions to certain third order neutral delay differential equations. Palestine J. Math. 09(02), 880–890 (2020)
Omeike, M.O.: New results on the asymptotic behavior of a third-order nonlinear differential equation. Differ. Equ. Appl. 2(1), 39–51 (2010)
Omeike, M.O.: New results on the stability of solution of some non-autonomous delay differential equations of the third order. Differ. Equ. Control Process. 2010(1), 18–29 (2010)
Oudjedi, L.D., Lekhmissi, B., Remili, M.: Asymptotic properties of solutions to third order neutral differential equations with delay. Proyecciones 38(1), 111–127 (2019)
Remili, M., Beldjerd, D.: On the asymptotic behavior of the solutions of third order delay differential equations. Rend. Circ. Mat. Palermo 63(3), 447–455 (2014)
Remili, M., Beldjerd, D.: A boundedness and stability results for a kind of third order delay differential equations. Appl. Appl. Math. 10(2), 772–782 (2015)
Remili, M., Beldjerd, D.: Stability and ultimate boundedness of solutions of some third order differential equations with delay. J. Assoc. Arab Univ. Basic Appl. Sci. 23, 90–95 (2017)
Remili, M., Oudjedi, L.: Stability and boundedness of nonautonomous neutral differential equation with delay. Math. Moravica 24(1), 1–16 (2020)
Sun, Y., Zhao, Y.: Oscillatory behavior of third-order neutral delay differential equations with distributed deviating arguments. J. Inequal. Appl. 2019, 207 (2019)
Tian, Y.-Z., Cai, Y.-L., Fu, Y.-L., Li, T.-X.: Oscillation and asymptotic behavior of third-order neutral differential equations with distributed deviating arguments. Adv. Differ. Equ. 2015, 14 (2015)
Tunç, C.: Some stability and boundedness conditions for non-autonomous differential equations with deviating arguments. E. J. Qual. Theory Differ. Equ. 1, 1–12 (2010)
Tunç, C.: New results about stability and boundedness of solutions of certain nonlinear third-order delay differential equations. Arab. J. Sci. Eng. Sect. A Sci. 31, 185–196 (2006)
Tunç, C.: Stability and boundedness of the nonlinear differential equations of third order with multiple deviating arguments. Afr. Mat. 24(3), 381–390 (2013)
Tunç, C.: Stability and bounded of solutions to non-autonomous delay differential equations of third order. Nonlinear Dyn. 62(4), 945–953 (2010)
Tunç, C.: Global stability and boundedness of solutions to differential equations of third order with multiple delays. Dyn. Syst. Appl. 24(4), 467–478 (2015)
Author information
Authors and Affiliations
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Fellous, A., Moulai-Khatir, A. & Remili, M. On stability and square integrability of solutions to some third order neutral differential equations. Afr. Mat. 33, 31 (2022). https://doi.org/10.1007/s13370-021-00936-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s13370-021-00936-z