
Abstract
In recent years, the use of renewable energy in power systems has increased significantly. This affects the inertia of the system. Also, the intermittent nature of renewable energy sources causes voltage and frequency fluctuations. This study suggests electric vehicles (EVs) as energy storage options for the diverse sources of an interconnected power system to resolve these issues. This paper also introduces the internal model control controller for load frequency control of an interconnected power system considering flexible AC transmission system and energy storage devices. The present study considers a two-area interconnected power system with thermal, hydro, and gas-generating units. The gain of the proposed controller is optimized using the particle swarm optimization technique. The advantages of the proposed controller have been highlighted by analyzing the results with conventional proportional–integral–derivative and proportional–integral–derivative with filter controller. The model includes superconducting magnetic energy storage (SMES), capacitive energy storage (CES), and redox flow batteries to support the voltage and frequency changes. A static synchronous series compensator compensates the tie-line. The performance of the SMES and CES units is compared with the proposed EVs used as energy storage units in this paper. The simulation results show that system performances improve significantly in the presence of the proposed energy storage unit. The behavior of the proposed controller is also analyzed under equal and unequal apf values. Finally, the sensitivity of the proposed controller is examined by varying the system parameters in a wide range.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Electricity grids across the globe in the interconnected environment are having a paradigm shift due to deregulation and penetration of different sources of energy, primarily non-conventional energy sources (NCESs) [1]. This results in a change in the conventional working process of electricity grids, with a particular impact on the inertia of the system and load frequency control (LFC) operation. Furthermore, when there is an effective increase in the penetration of NCESs in the generation mix, more storage may be required to maintain the frequency at desired value via LFC [2,3,4]. This issue raises the requirement for fast energy storage devices to manage the rise or fall in frequency [5,6,7]. The above challenges motivated the researchers to focus on energy storage devices, flexible AC transmission system (FACTS) devices, and metaheuristics techniques for obtaining better transient and steady-state performance in an interconnected power system under sudden load disturbances.
In the present grid structure, energy sources are mainly dominated by thermal and hydropower units. Several literature surveys [8, 9] highlight the LFC studies of an interconnected power system with hydro and thermal units or various combinations. The non-minimum phase characteristics of hydro turbines make them quite different from thermal units. With further advancement, the gas power system has also been integrated into the interconnected power system for LFC studies. It is mainly used during peak load demand to stabilize the frequency. So it becomes vital to study the LFC for diverse power generation sources.
Further, with recent development in power electronic switches and devices, accepted widely for better control purposes and better power quality, LFC of diverse sources in an interconnected power system has become reasonably practical. These devices are popularly known as FACTS and energy storage devices, improving the interconnected power system's dynamic performance and stability. The popular FACTS devices that enhance power system reliability and power flow capability are static synchronous series compensator (SSSC), unified power flow controller (UPFC), and thyristor control phase shifter (TCPS). Bhatt et al. [10] highlight the use of superconducting magnetic energy storage (SMES), SSSC, and TCPS for coordinated control of interconnected power systems; Chaterjee et al. [11] and Pradhan [12] describe the control methodology having SSSC and TCPS in the tie-line for an interconnected power system. Subramanium et al. [13] highlight the benefits of using SSSC and TCPS for a two-area interconnected power system. Energy storage devices such as capacitive energy storage (CES) [14], SMES [15], and redox flow batteries (RFB) [16, 17] have been widely used for decreasing the frequency oscillations under sudden load disturbances. Abraham et al. [14] have proposed an LFC scheme with CES for the interconnected power system. Das et al. [8] proposed the SMES effect in a two-area hydro-thermal interconnected power system. Shankar et al. [18] highlight the importance of RFB in LFC studies. In [19], the particle swarm optimization (PSO) technique is used to get the best controller parameters values for LFC studies. Panda et al. [20], Magdy et al. [21], Mohanty et al. [22], and Abaeifar et al. [23] have presented their work on LFC, which involves metaheuristic techniques like a genetic algorithm (GA), differential algorithm (DE), and teaching–learning-based optimization (TLBO) techniques for optimization of controller gain parameters. With recent advancements in vehicle-to-grid technology, it is now possible to use electric vehicles (EVs) for improved power quality and frequency management [24]. Debbarma et al. [25] highlight the use of EVs for ancillary services in the power system. Recently, Ten et al. [26] highlighted the importance of the internal model control (IMC) technique for LFC studies. In [26], controller design is based on process knowledge compared to other procedures where controller design is based on input–output relation.
The literature review reveals that over the past ten years, non-conventional sources of energy have received substantially more attention, with the majority of the research focusing on the integration of wind and solar power into the primary grid. It is found that NCES can readily meet the peak load requirement. The need for storage space increases along with the NCES. SMES, CES, and RFB primarily cover storage needs. However, attention is not paid to the significantly enhanced lithium-ion batteries utilized in electric vehicles. Numerous control schemes have been developed during the last few decades for optimal LFC operation. However, while designing the controller parameters, system knowledge is ignored. Several metaheuristic methods have been implemented to fine-tune the controller parameters, although the local information was not given much thought during algorithm development. In this work, EVs are used as a storage unit to fill the research gaps described above, and their dynamic response is compared with that of SMES, CES, and RFB. IMC controller is designed for the two-area interconnected power system with EVs, and system knowledge is used to construct the IMC controller parameter. Since PSO's method is based on local data and has more user-defined parameters than DE and TLBO, it is favored for tuning controller parameters. Additionally, the transmission lines are compensated by utilizing SSSC to increase the reliability of the power system and the capacity of the power flow. The objectives of the present work are as follows:
-
A two-area multi-source interconnected power system with energy storage units and FACTS devices is proposed, along with an IMC controller and its application in LFC.
-
To highlight the advantages of the proposed method (considering EVs) from other energy storage units like SMES, CES, and RFB.
-
Maiden analysis of equal and unequal values of apf in the LFC studies is carried out.
-
Sensitivity analysis of the proposed controller for a wide range of system parameters is considered.
This paper is presented as follows; Section II includes the proposed system model and its dynamics with brief highlights on SSSC. Section III contains the energy storage unit model. Section IV goes through various controller structures. Section V has an optimization problem formulation and PSO algorithm. Section VI and VII include results and discussions, and finally, conclusions are given in section VIII.
2 System Description
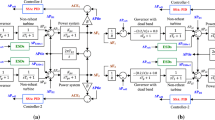
In this paper, a two-area multi-source interconnected power system model is considered to analyze the efficacy of the integration of process information. To analyze transient and steady-state performance under disturbances, a standard model of interconnected power systems with identical thermal, hydro, and gas units in each area is taken into account (Fig. 1). The generation rate constraint (GRC) is also incorporated in the interconnected power system model to account for the influence of nonlinear loads. GRC is a physical constraint that affects the system's behavior. GRC helps to keep a check on the excessive draw of steam under sudden load variation.

Small perturbation transfer function model of two-area multi-source power system [1]
The model also considers energy storage devices to meet the sudden load requirement. It helps the system in two ways when sudden load increases, it pumps energy into the system, and when the load decreases, it extracts and stores the extra energy in the system. In this way, it helps to improve dynamic performance. That is why the LFC study of two-area systems is carried out in two different modes, one without considering energy storage units and the other by considering energy storage units. For proper sharing of area control error signals among units, the effect of area control error (ACE) and area participation factor (apf) is also considered in the model. A step load change of 1% is considered here to examine the effect of CES, SMES, RFB and EV units under different controllers. Frequency deviation is considered input to the CES, SMES, RFB, and EV units. Nominal parameters of the thermal and hydro unit are taken from the research work of D. Das et al. [8], and the gas unit is taken from Tan et al. [26]. The other essential data are given in Appendix 1. Due to load changes, a tie-line static SSSC is used to stabilize the frequency further. It can control both active and reactive power exchange in the tie-line. The net impedance of interconnected power systems can be varied by connecting SSSC in the tie-line. It injects voltage of desired magnitude and phase angle compared with the line current. The actual power transfer occurs if the phase angle between injected voltage and line current is zero. On the other hand, if it is out of phase by 90° with line current reactive power transfer takes place [27]. Two-area system with SSSC compensated line and its phasor diagram is shown in Fig. 2.

Basic two-area system A series capacitor compensated tie-line B associated phasor diagram [2]
The net impedance with series capacitive compensation is given by:
Assuming V1 = V2 = V, the real power P is given by:
As the degree of K varies, the transmittable power also varies, and it increases with an increase in the value of K. The block diagram representation of SSSC is given in Fig. 3.

Block diagram representation of SSSC [18]
3 Modeling of Energy Storage Units for LFC
With the increased penetration of DC load in the system, energy storage devices have become an essential part of the power system. These devices can work in isolation or grid-connected mode as per necessity. Earlier flywheel attachment on the rotor shaft and batteries is used [28]. The disadvantage of the flywheel is that it develops severe torsional stress during transient oscillation, and with battery storage, the discharge rate is very low; hence, it requires a larger battery bank. On the other hand, for controlling the disturbances because of the increase in demand in the power system, the energy requirement is much lower, approximately 4–5 MJ (1.1–1.4 kWh), as disturbances last for a very short time. In this paper, attempts have been made to show the effect of CES, SMES, RFB, and EVs units for small perturbations in the power system, and the merits and demerits of each energy storage unit over others are highlighted.
3.1 SMES Unit [8]
The magnetic field is employed in this type of energy storage system to store a large amount of energy.
Increasing inductance has some physical constraints, so current is increased and in the order of kA. Since the magnetic coil has some resistance, power loss is prominent. The use of superconductors with zero resistance to prevent power loss is referred to as SMES. To maintain the superconductivity of the conductor refrigeration system is used with cooling material as liquid helium, as shown in Fig. 4. Now, when DC voltage is applied across the coil, the current will rise linearly. The coil is shorted when the system has reached the required energy level. So that the current keeps going on and will not decay when the coil's resistance becomes zero.

Schematic diagram of SMES connected to a three-phase line [11]
The current has to be decreased to extract stored energy from the coil, so a negative polarity voltage is applied across the coil. SMES is used to stabilize the power system for a short time interval in seconds. The shortcomings of this system are its high operating costs and need for routine maintenance. For LFC studies, the block diagram of the SMES unit is shown in Fig. 5.

Block diagram representation of SMES [11]
3.2 CES Unit [18]
CES unit is proposed in the literature to overcome the issues related to the SMES unit [14]. It has the advantage of being practically maintenance-free and has no environmental problems; it can be upgraded very easily. The operation cost of the CES unit is also significantly less compared to the SMES unit. Figure 6 shows the basic structure of the CES unit. The storage capacitor is connected to the three-phase line using PCS. The storage capacitor consists of the number of discrete capacitors in parallel having lumped capacitance value. A resistor is put across the capacitor to represent leakage and dielectric loss. The capacitor is generally charged from the line to its net voltage. With the help of gate turn-off thyristors (GTO), a reverse switching arrangement is provided to help the current to change its direction during charging and discharging mode. The demerit of this unit is that it has low energy storage capacity compared to batteries, and the stored energy may eventually deplete due to internal losses. The linear model of CES used for LFC studies is shown in Fig. 7.

Schematic diagram of CES connected to a three-phase line [14]

Block diagram representation of CES [14]
The input applied to the CES unit is ACE which also acts as a control signal for the CES unit. For the ith area, the change in the current is given by:
Voltage variation across the capacitor varies according to the ACE signal. The voltage variation across the capacitor is given by:
The product of capacitor voltage and current represents the capacitor power at any given time, while the product of capacitor voltage and current prior to disturbances represents the energy in the capacitor.
3.3 RFB Unit [29]
To overcome the issues related to SMES and CES units in the literature RFB unit is proposed. RFB represents electrochemical storage systems, often called electrochemical batteries. It has excellent short-time overload capacity. Vanadium RFB batteries are the most developed and mainly used for commercialization, as shown in Fig. 8 [17]. The ion-exchange membrane is used to separate positive and negative chambers of vanadium RFB.

Schematic diagram describing the configuration of RFB [29]
Electrolyte having different valance states is circulated in the positive and negative chambers. VO2+/VO2+ in positive chamber and V2+/V3+ in negative chamber are used as electrolytes. During the discharge mode, VO2+ is reduced to VO2+ at the positive electrode and V2+ oxidized to V3+ at the negative electrodes. The chemical equations are given as follows:
At Cathode:
At Anode:
Total equation:
Chamber-1 and chamber-2 are divided by an ion-exchange membrane. A pump is utilized to circulate the liquid bromine that is used in chambers I and II throughout the system. This storage unit's major demerit is the ion-exchange membrane's cost. Modeling of RFB results in a higher-order non-linear model. For the LFC study, linearized model of RFB is used, as shown in Fig. 9.

Block diagram representation of RFB [29]
3.4 Proposed EV Model
The proposed EV model for the primary control loop (PCL) consists of a charging and control block. In brief, an EV consists of a battery that is connected to the power system through a battery charger. The battery stores the required energy from the grid, and the battery charger controls the power exchange between the EV and the grid [30]. The dynamic model in the form of the transfer function for the closed-loop power control system is represented by a first-order transfer function with a small-time constant (35–100 ms), as shown in Fig. 10

Transfer function model of PEV [3]
The PCL consists of a dead-band function with fixed upper and lower limits. The regulation parameter of PCL depends upon the primary reserve, charging power, and participation factor. Figure 11 shows EVs' charging and idle mode in terms of participation factor and state of charge (SOC).

Droop ratio Vs SOC a Charging mode b Idle mode [4]
4 Controller Structures
The extension in area, complex operation, and variable disturbances badly affect the function and behavior of the modern interconnected power system. As a result, controller design becomes difficult to obtain LFC objectives and provide security to the power system [31]. In this paper, analysis has been done to determine the best controller of the studied interconnected system while considering the system information [29, 32, 33].
4.1 PID Controller
The prime objective of the PID controller is to provide the desired output as per requirement. Here, controlled variable is obtained by generating an appropriate actuating signal with the help of ACE. The conventional PID controller has three parts: the proportional part, the integral part, and the derivative part, respectively. Therefore, the mathematical expression of the controller considered is represented as:
The derivative part controls the stability and speed of the response in the PID controller. To ensure stability and speed, the input control signal also changes as well. The two major issues involved with PID controller are a requirement of considerable plant input and an increase in the magnitude of a control signal.
4.2 PIDF Controller
To overcome the above issues, a PIDF controller is proposed in the literature [34]. With a filter in the derivative part of the PIDF controller, chattering noise is prevented, and high-frequency disturbances are minimized. As a result, the derivative part cannot increase the high-frequency signals.
The ability to easily tune poles based on requirements is the PIDF controller's added benefit. The block diagram representation of the PIDF controller is shown in Fig. 12. The transfer function model of the PIDF controller is given as:

Block diagram of PIDF controller
For the controllers discussed above, i.e., PID and PIDF, the knowledge of process or plant is not considered while designing their parameters. It depends upon what is present value and what is desired value. Based on that, it will execute PID action without consideration for the actual relationship between input and output. As long as the gain is positive or negative, both the controllers work well.
4.3 Proposed IMC Controller for Diverse Energy Source
To overcome the above issues IMC controller is proposed, which uses the process information to design the control action. The output should be equal to set values in terms of the best controller. It is a reverse process, i.e., for the desired result, the input will be the same as the inverting mode. So, the control law depends upon the inverse of a model base control process. In contrast to PID and PIDF control, which are closed-loop control approaches, the open-loop control strategy utilized in IMC is the most simple and straightforward as shown in Fig. 13.

Block diagram representing the inverse of a process
The transfer function between input and output is given as:
So, if the transfer function value is 1, the output follows the desired result. It is instantaneous, but PID control requires a certain amount of time to reach the desired value. The representation of the IMC block is shown in Fig. 14.

Block diagram of the internal model controller
The two main steps involved in designing the IMC controller are:
-
(1)
The model of the plant is divided into two parts, namely invertible and non-invertible.
-
(2)
A filter is used for constructing the set-point tracking model of the IMC controller.
5 Problem Formulation
The optimization technique helps to get the desired solution in the feasible region. Based on desired specifications and restrictions, the objective function is first defined. Peak overshoot, rise time, settling time, and steady-state error are typical output specifications in the time domain. Objective function can be determined utilizing the following commonly used integral-based error criteria or performance indices (PIs): (i) Integral of time multiplied by absolute error (ITAE), (ii) integral of absolute error (IAE), (iii) integral of squared error (ISE), and (iv) integral of time multiplied by square error (ITSE). Systems tuned using ITAE settle substantially more quickly than those tuned using ISE, IAE, and ITSE. Mathematically PIs are represented as:
Therefore, the problem that needs an optimal solution is described as follows:
Minimize J
Subject to
Minimum and maximum value of controllers as reported in the literature is selected between − 10.0 and 10.0 [5]. Optimal solution is obtained by using PSO optimization algorithm. Various stages of this algorithm are:
-
(i)
Initialize random controller parameters and frequency deviation within the search space.
-
(ii)
Evaluate the objective function value.
-
(iii)
Assign pbest as P and fbest as f
-
(iv)
Identify the solution with the best fitness and assign that solution as gbest and fitness as fbest.
-
(v)
Perform iteration and determine the frequency deviation of the ith parameter using:
$$\begin{aligned} v_{i} \, &= \,w\,f_{d\,i,o} \, + \,c_{1} r_{1} (p_{{{\text{best}},i}} - x_{i} )\,\,\\ & + \,c_{2} r_{2} (g_{{{\text{best}}}} - x_{i} )\end{aligned}$$(20)$$x_{i} \, = \,\,x_{i,o} \, + \,f_{d\,i} \,$$(21) -
(vi)
Determine the new value of an ith parameter.
-
(vii)
Bound xi
-
(viii)
Evaluate the objective function value of the ith parameter.
-
(ix)
Update the controller parameter by including xi and fi.
-
(x)
Update pbest,I,and fpbest by using conditions:
$$\left. \begin{gathered} p_{{{\text{best}},i}} \,\,\, = \,\,x_{i} \hfill \\ f_{{{\text{pbest}},i}} \, = \,\,f_{i} \hfill \\ \end{gathered} \right\}\,\,if\,\,f_{i} \,\langle \,f_{{{\text{best}},i}}$$(22) -
(xi)
Update gbest and fgbest by using conditions:
$$\left. \begin{gathered} g_{{{\text{best}},i}} \,\, = \,p_{{{\text{best}},i}} \hfill \\ f_{{{\text{gbest}}}} \,\, = \,f_{{{\text{pbest}},i}} \hfill \\ \end{gathered} \right\}\,\,{\text{if}}\,\,f_{{{\text{pbest}},i}} \,\langle \,f_{{{\text{gbest}}}}$$(23) -
(xii)
Repeat the above procedure until the stopping criteria are met.
The above steps are represented in the form of a flowchart in Fig. 15.

Flowchart of PSO for tuning controller parameters
6 Simulation Results and Discussion
Under the normal operating condition, each unit in the power system maintains its load demand, and all the system parameter lies within the limit. However, the system's dynamic behavior shifts when disturbances result from an abrupt increase or decrease in load demand. To improve the dynamic performance, different controllers are used. Furthermore, adding energy storage units to the system can enhance its dynamic performance. LFC control loop consists of two parts, primary and secondary control loop. The PCL is relatively fast and regulates speed/frequency. In contrast, the secondary control loop, which is somewhat slower than the primary, is responsible for fine frequency adjustment. It also helps to maintain proper megawatt interchange between interconnected systems. The frequency deviation of each area with bias is used as input to the secondary controllers to generate the required control signal. This work is focused on an interconnected two-area system including different sources of energy and storage units with SSSC compensated tie-line. The model is simulated by considering 1% step load disturbance in area-1 and different controllers to determine the superiority of the proposed algorithm. The parameters and gain values of thermal, hydro, and gas units are optimized using differential evolution (DE), genetic algorithm (GA), and PSO techniques. Analysis of the proposed model is carried out for four different cases: (I) Simulation performed with different controllers, (II) simulation performed with energy storage units, (III) simulation performed for equal and unequal value of apf, and (IV) simulation performed for sensitivity analysis.
6.1 Case (I): Comparison of the Proposed Controller with Other Controllers
This section presents the simulation result by comparing the proposed controller with the PID [12] and PIDF [35] controller of the under-investigated power system, as shown in Fig. 16. For optimization of controller parameters, three different techniques have been used as given in Table 1. Parameters obtained with the PSO technique result in improved system response. In Fig. 16, the blue dotted line represents response with PID controller, the green color dotted line represents response with PIDF controller, and the red color dotted line represents response with proposed IMC controller. From Fig. 16, it is observed that the system equipped with an IMC controller results in fewer oscillations, improved settling time and minimal peak undershoot. Thus, it gives a better response compared to PID and PIDF controllers. The comparisons of settling time, peak undershoots, and PIs in terms of numerical values are shown in Table 2, along with a statistical chart comparison of peak undershoot in Fig. 17.

Comparison of the proposed controller with PID(12) and PIDF(31) controller: A, B, and C represents frequency variation in area-1, area-2, and tie-line power variation between area 1–2, respectively

Column chart comparison of peak undershoot
6.2 Case (II): Comparison of Proposed EV as an Energy Storage Unit with Other Energy Storage Devices
In this section, a comparison of the EV is made with different energy storage devices, SMES [11], CES [18], and RFB [35], as shown in Fig. 18. A significant amount of energy, in the range of 30–40 MJ, may be stored with the help of energy storage units. As a result, it can be utilized to stabilize the electrical system for a shorter period during peak load demand. Figure 18 shows that the system equipped with EVs as an energy storage device achieved the least damping oscillations, improved settling time, and minimal peak undershoot. Thus, it provides a superior dynamic performance response compared to SMES, CES, and RFB energy storage devices. If the energy requirement is gradual then RFB performs better but for LFC, energy requirement is sudden and the nature of the EV storage unit fulfills that criteria [36, 37]. In EVs, lithium-ion battery is used which has a higher power density than RFB which means that it releases its stored energy more quickly than RFB. Also, RFB have low charge and discharge rate [38]. The optimized parameters values using the PSO algorithm for CES, SMES, RFB, and EV units are given in Table 3. The comparisons of settling time, peak undershoots, and PIs in terms of numerical values are shown in Table 4, along with a statistical column chart for comparison of peak undershoot in Fig. 19.

Comparison of the dynamic response of the interconnected two-area system with proposed EV with different energy storage devices figures A, B, and C represents frequency deviation in area-1, frequency deviation in area-2, and tie-line power deviation between area 1–2, respectively

Column chart comparison of peak undershoot
6.3 Case (III): with Equal and Unequal Apf Value
In this section, simulation is performed by considering the proposed energy storage unit with different controller techniques for equal and unequal apf in the power system. In the first case, unequal apf is considered, which means that each generating unit in the control area participates in a different ratio to improve the dynamic performance under sudden load disturbance. In the second case, equal values of apf are considered.
6.4 Scenario (e) Sensitivity Analysis
Here, controller design is validated for a wide range of parameter variations of a diverse-source interconnected power system. For thermal unit hydraulic (TH) and turbine time (TT), the constant is varied in the range of ± 50% and ± 25% of the nominal value. Similarly, for the hydro unit, transient droop time (T1), main servo time (T2) and time taken for water to pass through a penstock (TW), and for the gas unit, valve positional time (T3), lag time (T4), fuel time (T5) and compressor discharge volume time (T6) are varied. For the analysis, focus is given to thermal units as their share of load is more than 60% in the power system. Therefore, a thermal unit with 80% of apf value, a hydro unit with 10% apf value, and a gas unit with 10% apf value are considered for analysis. For both cases, PID, PIDF, and proposed controllers' performance is analyzed in the presence of the EVs. Figure 20 shows that the system having equal apf performs better in terms of least damping oscillations, improved settling time and minimal peak undershoot. The comparisons of settling time, peak undershoots, and PIs in terms of numerical values are given in Table 5.

Dynamic response of interconnected two-area system with different apf values figures A, B, and C represents response with unequal apf, and D, E, and F represents response with equal apf
6.5 Case (IV): Sensitivity Analysis
This section validates controller design for various parameter variations of a diverse-source interconnected power system. For the thermal unit, the hydraulic time constant and turbine time constant are varied in the range of ± 50% and ± 25% of the nominal value. Similarly, for the hydro unit, transient droop time, main servo time, and time taken for water to pass through a penstock are varied in the range of ± 50% and ± 25% of nominal value. Finally, for the gas unit, positional valve time, lag time, fuel time, and compressor discharge volume time are varied in the range of ± 50% and ± 25% of the nominal value. Figure 21 shows the response of thermal, hydro, and gas units at nominal ± 50% and ± 25% simultaneous changes of parameters. Critical inspection of Fig. 21 reveals that the system dynamic behavior is more or less stable and similar; hence, proposed controller works robustly under various operating conditions. It can also be observed from the response that settling time and peak undershoot values change within acceptable ranges and are nearly equal to the respective values obtained with the nominal system parameter.

Dynamic response of thermal, hydro, and gas unit figures A, B, and C represents response with parameters variation ± 50% and ± 25% of nominal value, and figure D represents the response of thermal unit including EVs for parameter variations ± 50% and ± 25% of nominal value
7 General Discussions
This analysis shows that EVs are superior to SMES, CES, and RFB units as storage units in interconnected, diverse-source power systems. Here, the battery control and charging process of the proposed EV are modeled with the help of the transfer function. The type of controller employed in areas 1 and 2 is the same, and the performance of the proposed controller is compared to that of the PID and PIDF controllers. Compared to PID and PIDF controllers, which are designed based on input–output relations, the proposed IMC controller for this system is designed based on system information. Also, equal and unequal apf values were used in the system analysis, showing that the equal apf offered very good dynamic responses. The performance of the proposed IMC controller and energy storage unit is also tested by varying the hydraulics and governor time constants of the individual thermal, hydro, and gas units. It is important to note that the study only considers a limited range of load variation in area-1 (1% of step load disturbance of rated capacity) to make inferences and shows the results. However, disturbances can happen in both areas, and step load disturbance can be considered in the range of 1–10% of rated area capacity. Furthermore, the studies can be extended to any number of interconnected power systems. However, the inferences drawn and presented approach about the energy storage unit and the controller may remain the same for all cases.
8 Conclusion
The load frequency control of a diverse-source interconnected power system has been proposed in this paper using a particle swarm optimization (PSO)-optimized internal model control (IMC) controller. The optimal gains of the IMC controller are first derived using the PSO technique on a two-area, six-unit power system without any energy storage unit. For the same interconnected power system, it has been found that the proposed controller performs more effectively than several recently published techniques, such as the DE-optimized PID controller (12) and the GA-optimized PIDF controller (31). Then, energy storage units such as SMES, CES, and RFB were connected, and the superiority of the proposed storage unit, i.e., EVs over SMES, CES, and RFB, has been demonstrated. FACTS devices were added to the tie-line to enhance system performance further. It has been found that the dynamic performance has improved when the tie-line is compensated with SSSC. Furthermore, the effects of both equal and unequal area participation factors have been analyzed. The simulation results showed that the application of EV and SSSC together effectively improves dynamic responses. Finally, sensitivity analysis has been carried out by varying the system parameters between + 50% and − 50% from their nominal values to show the robustness of the controller. Since the parameters of the proposed PSO-optimized IMC controllers do not need to be reset even when the parameters are significantly changed, it has been found that the proposed control approach provides robust and stable control.
Abbreviations
- ∆E di :
-
Voltage variation across capacitor
- ∆f 1 & ∆f 2 :
-
Frequency deviation in area-1 and area-2
- ∆f ll :
-
Dead band lower limit
- ∆f lu :
-
Dead band upper limit
- ∆I d :
-
Change in current
- ∆I d0 :
-
Change in current before disturbance
- ∆P imax :
-
Primary reserve upper limit of EV
- ∆P imin :
-
Primary reserve lower limit of EV
- ∆P PCL :
-
Power of primary control loop
- ∆P ref :
-
Reference power
- ∆P tie :
-
Tie-line power deviation
- apf:
-
Area participation factor
- B i :
-
Frequency bias parameter of ith unit
- c 1 & c 2 :
-
Acceleration coefficients
- e(t):
-
Error signal
- E d0 :
-
Capacitor voltage before disturbance
- f best :
-
Best fitness function
- G p(s):
-
System to be control
- H p(s):
-
Model of the system to be control
- I :
-
DC current flowing in the SMES coil
- i = 1, 2, 3..:
-
Represents number of area
- I 2 R :
-
Power loss across SMES coil
- I d0 :
-
Capacitor current before disturbance
- K :
-
Degree of compensation
- K CES :
-
Gain of CES unit
- K d :
-
Derivative gain of controller
- K EV :
-
Gain of EV
- K i :
-
Participation factor of ith unit
- K i :
-
Integral gain of controller
- K p :
-
Proportional gain of controller
- K pmax, K imax & K dmax :
-
Maximum values of proportional, integral and derivative controller gain parameters
- K pmin, K imin & K dmin :
-
Minimum values of proportional, integral and derivative controller gain parameters
- K r :
-
Reset gain of RFB
- K RFB :
-
Gain of RFB
- K SMES :
-
Gain of SMES unit
- K SSSC :
-
Gain of SSSC
- L :
-
Inductance of SMES coil
- N :
-
Derivative filter coefficient
- P d0 :
-
Capacitor power before disturbance
- P R :
-
Rated area capacity
- Q(s):
-
Model-based controller
- r 1 & r 2 :
-
Random numbers
- R i :
-
Regulation parameter of ith unit
- T o :
-
Synchronizing coefficient of tie-line
- T 1 :
-
Droop time constant
- T 2 :
-
Main servo time constant
- T 3 :
-
Valve positioned constant
- T 4 :
-
Speed governor lag time
- T 5 :
-
Fuel time constant
- T 6 :
-
Discharge volume time constant
- T d :
-
Time delay constant of RFB
- T H :
-
Hydraulic time constant
- T P :
-
Power system time constant
- T Q :
-
Combustion reaction time delay
- T r :
-
Reset time constant of RFB
- T R :
-
Speed governor rest time
- t sim :
-
Simulation time
- T SSSC :
-
Time constant of SSSC
- T T :
-
Turbine time constant
- T W :
-
Water time constant
- U :
-
Input
- V :
-
Voltage across SMES coil
- V 1 :
-
Area-1 voltage
- V 2 :
-
Area-2 voltage
- V C :
-
Voltage across compensating capacitor
- V L :
-
Voltage across tie-line inductor
- X eff :
-
Net impedance of SSSC
- Y :
-
Output
- Y set :
-
Desired output
References
Rizwan, M.; Hong, L.; Muhammad, W.; Waqar Azeem, S.; Li, Y.: Hybrid Harris Hawks optimizer for integration of renewable energy sources considering stochastic behavior of energy sources. Int. Trans. Electr. Energy Syst. (2021). https://doi.org/10.1002/2050-7038.12694
Sandgani, M.R.; Sirouspour, S.: Coordinated optimal dispatch of energy storage in a network of grid-connected microgrids. IEEE Trans. Sustain. Energy 8, 1166–1176 (2017). https://doi.org/10.1109/TSTE.2017.2664666
Shinde, P.; Hesamzadeh, M.R.; Date, P.; Bunn, D.W.: Optimal dispatch in a balancing market with intermittent renewable generation. IEEE Trans. Power Syst. 36, 865–878 (2021). https://doi.org/10.1109/TPWRS.2020.3014515
Rocabert, J.; Capó-Misut, R.; Muñoz-Aguilar, R.S.; Candela, J.I.; Rodriguez, P.: Control of energy storage system integrating electrochemical batteries and supercapacitors for grid-connected applications. IEEE Trans. Ind. Appl. 55, 1853–1862 (2019). https://doi.org/10.1109/TIA.2018.2873534
Abouzeid, S.; Guo, Y.; Zhang, H.-C.: Coordinated control of the conventional units, wind power, and battery energy storage system for effective support in the frequency regulation service. Int. Trans. Electr. Energy. Syst. (2019). https://doi.org/10.1002/2050-7038.2845
Doenges, K.; Egido, I.; Sigrist, L.; Lobato Miguélez, E.; Rouco, L.: Improving AGC performance in power systems with regulation response accuracy margins using battery energy storage system (BESS). IEEE Trans. Power Syst. 35, 2816–2825 (2020). https://doi.org/10.1109/TPWRS.2019.2960450
Iliadis, P.; Ntomalis, S.; Atsonios, K.; Nesiadis, A.; Nikolopoulos, N.; Grammelis, P.: Energy management and techno-economic assessment of a predictive battery storage system applying a load levelling operational strategy in island systems. Int. J. Energy Res. 45, 2709–2727 (2021). https://doi.org/10.1002/er.5963
Abraham, R.J.; Das, D.; Patra, A.: AGC study of a hydrothermal system with SMES and TCPS. Eur. Trans. Electr. Power 19, 487–498 (2009). https://doi.org/10.1002/etep.235
Nanda, J.; Mangla, A.; Suri, S.: Some new findings on automatic generation control of an interconnected hydrothermal system with conventional controllers. IEEE Trans. Energy Convers. 21, 187–194 (2006). https://doi.org/10.1109/TEC.2005.853757
Bhatt, P.; Ghoshal, S.P.; Roy, R.: Optimized automatic generation control by SSSC and TCPS in coordination with SMES for two-area hydro-hydro power system. In: 2009 Int. Conf. Adv. Comput. Control. Telecommun. Technol., 2009, pp. 474–80. https://doi.org/10.1109/ACT.2009.123
Chatterjee, K.; Sankar, R.; Chatterjee, T.K.: SMES coordinated with SSSC of an interconnected thermal system for load frequency control. In: 2012 Asia-Pacific Power Energy Eng. Conf., 2012, pp. 1–4. https://doi.org/10.1109/APPEEC.2012.6307061
Padhan, S.; Sahu, R.K.; Panda, S.: Automatic generation control with thyristor controlled series compensator including superconducting magnetic energy storage units. Ain Shams Eng. J. 5, 759–774 (2014). https://doi.org/10.1016/j.asej.2014.03.011
Subbaramaiah, K.; Jagan Mohan, V.; Reddy, V.C.V.: Improvement of dynamic performance of SSSC and TCPS based hydrothermal system under deregulated scenario employing PSO based dual mode controller. Eur. J. Sci. Res. 57, 230–243 (2011)
Abraham, R.J.; Das, D.; Patra, A.: Effect of capacitive energy storage on automatic generation control. In: 2005 Int. Power Eng. Conf., 2005, pp. 1070–1074 Vol. 2. https://doi.org/10.1109/IPEC.2005.207066
Lee, J.; Kim, J.-H.; Joo, S.-K.: Stochastic method for the operation of a power system with wind generators and superconducting magnetic energy storages (SMESs). IEEE Trans. Appl. Supercond. 21, 2144–2148 (2011). https://doi.org/10.1109/TASC.2010.2096491
Sharma, M.; Dhundhara, S.; Arya, Y.; Prakash, S.: Frequency stabilization in deregulated energy system using coordinated operation of fuzzy controller and redox flow battery. Int. J. Energy Res. 45, 7457–7475 (2021). https://doi.org/10.1002/er.6328
Oshnoei, S.; Oshnoei, A.; Mosallanejad, A.; Haghjoo, F.: Novel load frequency control scheme for an interconnected two-area power system including wind turbine generation and redox flow battery. Int. J. Electr. Power Energy Syst. 130, 107033 (2021). https://doi.org/10.1016/j.ijepes.2021.107033
Shankar, R.; Bhushan, R.; Chatterjee, K.: Small-signal stability analysis for two-area interconnected power system with load frequency controller in coordination with FACTS and energy storage device. Ain Shams Eng. J. 7, 603–612 (2016). https://doi.org/10.1016/j.asej.2015.06.009
Tayal, V.K.; Lather, J.S.: Reduced order H∞ TCSC controller & PSO optimized fuzzy PSS design in mitigating small signal oscillations in a wide range. Int. J. Electr. Power Energy Syst. 68, 123–131 (2015). https://doi.org/10.1016/j.ijepes.2014.12.033
Panda, S.; Padhy, N.P.: Comparison of particle swarm optimization and genetic algorithm for FACTS-based controller design. Appl. Soft Comput. 8, 1418–1427 (2008). https://doi.org/10.1016/j.asoc.2007.10.009
Gaber Magdy, G.; Shabib, A.A.; Elbaset, Y.M.: Optimized coordinated control of LFC and SMES to enhance frequency stability of a real multi-source power system considering high renewable energy penetration. Prot. Control Mod. Power Syst. (2018). https://doi.org/10.1186/s41601-018-0112-2
Sahin, E.: Design of an optimized fractional high order differential feedback controller for load frequency control of a multi-area multi-source power system with nonlinearity. IEEE Access 8, 12327–12342 (2020). https://doi.org/10.1109/ACCESS.2020.2966261
Abaeifar, A.; Barati, H.; Tavakoli, A.R.: Inertia-weight local-search-based TLBO algorithm for energy management in isolated micro-grids with renewable resources. Int. J. Electr. Power Energy Syst. 137, 107877 (2022). https://doi.org/10.1016/j.ijepes.2021.107877
Yilmaz, M.; Krein, P.T.: Review of the Impact of vehicle-to-grid technologies on distribution systems and utility interfaces. IEEE Trans. Power Electron. 28, 5673–5689 (2013). https://doi.org/10.1109/TPEL.2012.2227500
Debbarma, S.; Dutta, A.: Utilizing electric vehicles for LFC in restructured power systems using fractional order controller. IEEE Trans. Smart Grid 8, 2554–2564 (2017). https://doi.org/10.1109/TSG.2016.2527821
Tan, W.: Unified tuning of PID load frequency controller for power systems via IMC. Power Syst. IEEE Trans. 25, 341–350 (2010). https://doi.org/10.1109/TPWRS.2009.2036463
Hemmati, R.; Faraji, H.; Beigvand, N.Y.: Multi objective control scheme on DFIG wind turbine integrated with energy storage system and FACTS devices: steady-state and transient operation improvement. Int. J. Electr. Power Energy Syst. 135, 107519 (2022). https://doi.org/10.1016/j.ijepes.2021.107519
Gayathri, N.S.; Senroy, N.; Kar, I.N.: Smoothing of wind power using flywheel energy storage system. IET Renew. Power Gener. 11, 289–298 (2017). https://doi.org/10.1049/iet-rpg.2016.0076
Singh, K.; Amir, M.; Ahmad, F.; Khan, M.A.: An integral tilt derivative control strategy for frequency control in multimicrogrid system. IEEE Syst. J. 15, 1477–1488 (2021). https://doi.org/10.1109/JSYST.2020.2991634
Dutta, A.; Debbarma, S.: Frequency regulation in deregulated market using vehicle-to-grid services in residential distribution network. IEEE Syst. J. 12, 2812–2820 (2018). https://doi.org/10.1109/JSYST.2017.2743779
Ahmed, M.; Magdy, G.; Khamies, M.; Kamel, S.: Modified TID controller for load frequency control of a two-area interconnected diverse-unit power system. Int. J. Electr. Power Energy Syst. 135, 107528 (2022). https://doi.org/10.1016/j.ijepes.2021.107528
Rerkpreedapong, D.; Hasanovic, A.; Feliachi, A.: Robust load frequency control using genetic algorithms and linear matrix inequalities. IEEE Trans. Power Syst. 18, 855–861 (2003). https://doi.org/10.1109/TPWRS.2003.811005
Behera, A.; Panigrahi, T.K.; Ray, P.K.; Sahoo, A.K.: A novel cascaded PID controller for automatic generation control analysis with renewable sources. IEEE/CAA J. Autom. Sin. 6, 1438–1451 (2019). https://doi.org/10.1109/JAS.2019.1911666
Mohanty, P.K.; Sahu, B.K.; Pati, T.K.; Panda, S.; Kar, S.K.: Design and analysis of fuzzy PID controller with derivative filter for AGC in multi-area interconnected power system. IET Gener. Transm. Distrib. 10, 3764–3776 (2016). https://doi.org/10.1049/iet-gtd.2016.0106
Izadkhast, S.; Garcia-Gonzalez, P.; Frías, P.: An aggregate model of plug-in electric vehicles for primary frequency control. IEEE Trans. Power Syst. 30, 1475–1482 (2015). https://doi.org/10.1109/TPWRS.2014.2337373
Izadkhast, S.; Garcia-Gonzalez, P.; Frias, P.; Bauer, P.: Design of plug-in electric vehicle’s frequency-droop controller for primary frequency control and performance assessment. IEEE Trans. Power Syst. 32, 4241–4254 (2017). https://doi.org/10.1109/TPWRS.2017.2661241
Gorripotu, T.S.; Sahu, R.K.; Panda, S.: AGC of a multi-area power system under deregulated environment using redox flow batteries and interline power flow controller. Eng. Sci. Technol. Int. J. 18, 555–578 (2015). https://doi.org/10.1016/j.jestch.2015.04.002
Center for Sustainable Systems, University of Michigan. 2022. “U.S. Grid Energy Storage Factsheet.” Pub. No. CSS15–17
Author information
Authors and Affiliations
Corresponding author
Appendix 1
Appendix 1
Power system data | T5 | T51 = T52 = 0.23 s | |
PR | PR1 = PR2 = 2000 MW | T6 | T61 = T62 = 0.2 s |
fo | 60 Hz | TQ | TQ1 = TQ2 = 0.3 s |
R | R1 = R2 = 2.4 Hz/puMW | CES data | |
B | B1 = B2 = 0.425 | C | 1.0 F |
KP | KP1 = KP2 = 120 | R | 100 Ω |
TP | TP1 = TP2 = 20 s | TDC | 0.05 s |
Thermal unit data | KACE | 70kA/unit MW | |
TH | TH1 = TH2 = 0.08 s | Kvd | 0.1kA/kV |
TT | TT1 = TT2 = 0.3 s | SMES data | |
Hydro unit data | L | 2.65H | |
T1 | T11 = T12 = 28.75 s | TDC | 0.03 s |
T2 | T21 = T22 = 0.2 s | KSMES | 100 kV/unit MW |
TR | TR1 = TR2 = 5 s | Kid | 0.2 kV/kA |
TW | TW1 = TW2 = 1 s | RFB data | |
Gas unit data | TR | 0 s | |
T3 | T31 = T32 = 0.05 s | Td | 0 s |
T4 | T41 = T42 = 1.1 s | KR | 0 |
Tp | Tp1 = Tp2 = 0.6 s | KRFB | 1.8 |
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Shukla, R.R., Panda, A.K., Garg, M.M. et al. Performance Analysis of Diverse-Source Interconnected Power System with Internal Model Controller in the Presence of EVs. Arab J Sci Eng 48, 14295–14312 (2023). https://doi.org/10.1007/s13369-022-07527-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13369-022-07527-5