
Abstract
The fast-growing traffic loads may become a safety hazard for existing bridges especially in developing countries. One of the problems induced by heavy traffic loads is the fatigue damage accumulation of the welded joints in steel bridge decks. This study utilized a stochastic traffic flow model and a novel computational framework for estimating fatigue reliability of orthotropic steel bridge decks using site-specific traffic data. The stochastic traffic flow is demonstrated as an effective approach for converting the probabilistic characteristics of the site-specific traffic data into the fatigue stress spectrum modeling of steel bridge decks. In addition, the traffic growth and control measures can be considered in the stochastic traffic flow for lifetime fatigue reliability estimation of the bridge deck. The proposed computational framework involves a meta-model approximated by neural networks that can greatly reduce the computational effort. Orthotropic steel bridge decks in a long-span suspension bridge is chosen as prototype to illustrate the effective of the stochastic traffic flow model and the computational framework. Numerical results show the following conclusions: firstly, the efficiency and accuracy of the framework is associated with the number of training samples, where approximately 180 training samples is essential for training the 6-types of meta-models; secondly, a annual growth rate of the vehicle weight of 0.5% leads to the fatigue reliability index of the bridge in the 100th year decrease from 5.94 to 0.92. The numerical result may provide a theoretical basis for how to control overloaded trucks for ensuring the bridge safety.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Orthotropic steel decks are widely used in long-span bridges due to the advantages in light weight, high strength, and short construction period (Dung et al. 2015; Fu et al. 2018). However, recent field investigations on several collapsed steel bridges (Lalthlamuana and Talukdar 2013; Han et al. 2015; Cheng et al. 2017a, b; Han et al. 2018b) indicated that the fatigue damage induced by accidental overloaded trucks contributed to the bridge failures. Thus, the fast-growing traffic loads may become a safety hazard for the fatigue safety of steel bridges especially in developing countries. Uncertainties in traffic flows affect the accuracy of evaluating the fatigue damage accumulation, where the probability model of fatigue damage accumulation mostly depends on the site-specific traffic loading (Lu et al. 2017). Therefore, integrating the actual traffic information into the fatigue reliability evaluation of existing steel bridges is of great importance, which can provide a more actual evaluation result and a theoretical basis for transportation management.
Numerous research efforts have been concentrated to implementing structural health monitoring (SHM) data to evaluate fatigue damage accumulation in fatigue-critical component joints of steel bridges (Frangopol et al. 2008; Ye et al. 2012, 2018; Han et al. 2018a). However, the most fatigue-critical position in the bridge deck are difficult to place sensors (Sim and Uang 2012; Gokanakonda et al. 2016). On this regard, the numerical approach can be utilized to simulate the fatigue stress of a bridge considering actual traffic loads. Meanwhile, the fast developing computer technology and traffic weigh-in-motion (WIM) technology contribute to the efficiency and accuracy of the fatigue damage simulation.
Site-specific weigh-in-motion(WIM) measurements provide big data for statistical analysis of traffic loading (OBrien and Enright 2013; Deng et al. 2018). Numerous traffic models have been developed based on site-specific WIM data. For instance, Zhao and Tabatabai (2012) developed a 5-axle single-unit truck model based on the WIM records in Wisconsin to supplement the permit vehicle model. OBrien et al. (2010) estimated the characteristic maximum dynamic load effects of short to medium span bridges with extensive WIM measurements collected at 5 European sites. Marques et al. (2016) implemented WIM measurements of an old railway bridge in Portugal to simulate the axle load, axle spacing and the velocity of the train. Cui et al. (2017) evaluated the fatigue life of orthotropic steel bridge decks considering stochastic traffic load and residual stress. Zhu and Zhang (2018) evaluated the fatigue damage of coastal slender bridges considering vehicle-bridge interaction effects. In addition to the traffic load modeling, the WIM measurements in connection with the finite element technology have also been used for fatigue reliability evaluation of steel bridges. Guo et al. (2012) evaluated the fatigue reliability of an orthotropic deck using a probabilistic finite element approach. In the Guo’s truck load model, the axle weights were fitted by lognormal distribution functions, while the bimodal or trimodal characters of the truck load were ignored. Subsequently, Guo and Chen (2013) demonstrated the effectiveness of integrating of the specific data and the finite element model for fatigue reliability assessment. Ye et al. (2015) presented a mesh-insensitive structural stress method to investigate the influence of element size and element type in computing structural stresses. An advanced probabilistic fatigue stress analysis approach is proposed by Zhang and Au (2016) using WIM measurements.
As elaborated above, implementation of WIM measurements is an effective way to simulate the stochastic traffic loading, which can be subsequently utilized for fatigue damage evaluation of existing steel bridges. However, the balance of computational efficiency and accuracy is still bottleneck that limiting the developing of existing fatigue reliability assessment approaches. In Zhang’s computational framework, the calculation of thousands of stress histories with respect to the daily truck volume is obviously a time-consuming problem. On the other side, since the actual traffic loads are random in nature, the design fatigue truck load model cannot be utilized for probability analysis. The relative research effort on the stochastic traffic load model is the dynamic coupled vibration analysis (Zhou and Chen 2015). However, implementing of stochastic traffic model for estimating fatigue safety of steel bridge decks seems insufficient.
This study aims to develop an efficient computational framework for implementing traffic WM measurements for fatigue reliability evaluation of steel bridge decks. Initially, long-term monitored traffic data of a highway is utilized to simulate stochastic traffic load model, and the traffic growth ratio is also included to consider the future traffic. Subsequently, a meta-model approximated by neural networks is utilized to substitute the traditional finite-element simulation. The proposed computational framework is subsequently utilized to evaluate fatigue reliability of the welded joints in a steel bridge deck. Parametric studies are conducted to provide suggestions to the traffic management based on the fatigue reliability analysis.
2 Implementing WIM Measurements for Stochastic Truck Load Modeling
A probabilistic traffic load model is a basis for fatigue reliability evaluation. Since the traditional truck load models contain deterministic configurations and axle weights, they are inappropriate for probabilistic analysis. Therefore, this study utilizes a stochastic truck load model to consider the probabilistic characteristics in the site-specific WIM data.
2.1 WIM Measurements
In general, a WIM equipment has number of scales and pressure sensors that is embedded in the road pavement. When a moving vehicle crosses the WIM equipment, the sensors records the axle weight, the driving speed, the vehicle type and the time. These data can be used for a range of tasks, such as transportation management and overloaded truck monitoring. In the present study, those WIM measurements will be used as a statistical database for stochastic traffic flow simulation.
This study chooses a WIM system of a highway bridge in China as a prototype, which has been working since 2012, and information of the WIM system can be found in Liu et al. (2015). For the purpose of simulating stochastic fatigue truck load models, these data were filtered to remove invalid data, such as the cars with GVW less than 30 kN. The information of the filtered data is listed in Table 1. According to the transportation control in china (MOCAT 2004), the maximum GVW for 6-axle trucks is 550 kN. However, the maximum truck overloading rate more than 200% as observed form Table 1.
The entire monitored vehicles were classified into 6 categories as so-called vehicle types. Figure 1 shows vehicle type proportions, driving lane proportions and the average daily truck traffic (ADTT), where V1 is light trucks, V2 to V6 are the 2-axle to 6-axle trucks, respectively, and AWij is the jth axle weight of the ith vehicle type. It is observed that about 60% of the vehicles are light cars, and heavy trucks have a large probability of driving in the slow lane. These phenomena of the traffic information will contribute to the accurate fatigue damage evaluation of a steel bridge.

Probability densities: a vehicle type; b traffic lane; c ADTT
As highlighted in opening literatures, the vehicle axle weight is the most sensitive parameter leading to the fatigue damage accumulation in steel bridges. Therefore, each axle weight of each type of vehicles was investigated. Taking V6 as an example, the axle weight of the 6th axle indicated as AW64, are collected, and the histogram and probability density functions (PDFs) are shown in Fig. 2.

Histograms and PDFs of the 6-axle: a GVW; and b axle weight
In Fig. 2, the Gaussian mixture model (GMM) is superposition of a several normal distributions. The GMM has the capability of capturing the overload behaviors of trucks, where the first and the second peaks in the PDF denotes the normal and overloaded trucks. The mathematical expression of the GMM can be written as (Xia et al. 2012)
where \(f(y,a,\theta )\) is a predictive mixture density, \(f(y|\theta_{i} )\) is a normal distributed PDF with respect to θi, and ai, μi and σi are the weight, the mean value and the standard deviation of the ith normal distributed functions, respectively.
The relationship between the GVW and each axle weights were also investigated. Linear functions were approximated as shown Fig. 3 to represent the axle weight proportion. In Fig. 3, x is the GVW of a vehicle, and y is an axle weight. It is assumed that the individual axle weight in the tandem and tridem axles is equal. The goodness of fit for AW61, AW62, and AW66 in Fig. 3 are 0.72, 0.83, and 0.91, respectively.

Fitted functions between axle weights and GVWs of the 6-axle truck
2.2 Stochastic Truck Load Modeling
In a stochastic traffic flow, there are number of the random variables, including vehicle types, vehicle weights, driving speeds and vehicle spacings. This study considers the vehicle parameters with significant influence on the fatigue stress of the bridge deck. For a general load influence line of a welded joint in a steel bridge deck (Ji et al. 2013), the effective load length is very short, usually between two diaphragms. Therefore, the vehicle spacing, which is quite larger than the effective load length, can be ignored in the stochastic traffic model. On the contrary, the axle weight and vehicle configuration are chosen for modeling the stochastic truck load.
Based on the above illustration, a stochastic truck load model with was built considering the parameters of vehicle types, vehicle weights, and driving lanes. The vehicle samples were generated using the Monte Carlo simulation method. In order to consider the traffic growth in the bridge service period, a linear growth factor of the average daily truck traffic (ADTT) is assumed as 0.5%. A linear growth factor of average daily traffic volume (ADTT) is assumed with a upper threshold value of 0.5%. On this basis, the current traffic and further traffic in the 100th year are shown in Fig. 4, where x-axis is the arrival time of induvial truck, and the y-axis is the vehicle weight.

Simulated stochastic truck load models: a present; and b the 100th year
It is observed from Fig. 4 that the vehicles are random both in time domain and spatial domain. Under the condition of a large number of vehicles, these samples can reflect the probabilistic information of the actual traffic. Therefore, the stochastic traffic load model provides a foundation for utilizing actual traffic data for the probabilistic analysis of traffic load effects on a bridge.
3 Limit State Function of Fatigue Damage Accumulation
Before utilizing the stochastic traffic load model for fatigue safety evaluation, a reasonable limit state function of the fatigue damage is essential to include the traffic growth impact. This study utilized the S-N curve theory and the linear fatigue damage accumulation principle to compute the fatigue damage, and the traffic growth is considered with growth rates of the traffic volume and the vehicle weight.
3.1 Fatigue Damage Accumulation Formulations
Each truck passage will induce obvious stress history for certain places in the bridge deck. Since the truck weights are random in nature, the fatigue stresses have time-varying amplitudes. In addition, the truck-induced fatigue stresses are low in stress amplitudes and high in number of stress cycles. Therefore, before evaluating the truck-induced fatigue damage using the S-N curve theory, special attention should be payed on the following requirements: firstly, categories of the fatigue-critical places should be contained in the S-N curves; secondly, the parameters in the S-N curves should include the low-stress cycles induced by the high-occupancy light trucks. After a comprehensive comparison analysis of the current S-N curves in various national design codes, this study chose the Eurocode3 specification (ECS 2005) due to its perfect satisfaction of the above requirements. In Eurocode3 specification, an S-N curve is written as
where ΔσR is the stress range of a stress block, NR is the number of stress cycles with a constant stress range of ΔσR, ΔσD is a threshold stress range for variant-amplitude stress blocks, ΔσL a threshold stress blocks, and KC and KD are the strength coefficients. Based on the classification of the joint details specified in the Eurocode3 code, the fatigue-critical joints in the orthotropic steel bridge deck are the rib-to-deck (detail category 50) and the butt-joint of U-ribs (detail category 71). Table 2 summarizes the S-N curve parameters of the two welded joints in Eurocode3 specification.
The major premise of directly utilizing S-N curves for fatigue damage evaluation should be constant-amplitude stress blocks. Since the traffic loads are random in nature, the stress blocks in the bridge deck have variant amplitudes. Therefore, this study utilized an equivalent fatigue stress formula to deal with the traffic-induced variant-amplitude stress cycles. Based on Miner’s damage criterion (Miner 1945), the fatigue damage accumulation can be written as
where Δσi and Δσj are stress cycles greater or less than ΔσD, respectively; ni and nj are the corresponding number of stress cycles; Δσre is the equivalent stress range; and Neq is the equivalent number of stress cycles. The advantage of Eq. (3) is that the traffic load induced stress cycles were all included without cut off the high-cycle and low-amplitude stress cycles. Therefore, the equivalent stress range induced by a truck load is
where the variant-amplitude stress blocks have been transformed as constant-amplitude stress blocks.
3.2 Limit State Function
Based on the fatigue damage accumulation formulations illustrated above, the limit state function can be formulated considering traffic characters. In the present study, the considered traffic load parameters are the transverse distribution factor of wheels on bridge decks, and the growth rate of traffic volume and vehicle weights. Thus, the comprehensive limit state function is
where X is random variables, DΔ is the critical fatigue damage that can be determined as 1, Dt is the fatigue damage accumulation, w is the transverse distribution coefficient of a truck, n is the bridge lifetime, Nd is the number of daily stress cycles, P(i) is the proportion of the ith type of vehicles, NADTT is the number of ADTT, and RADTT and RGVW are linear annual growth rates of the ADTT and GVW, respectively.
4 Proposed Computational Framework
In general, the traditional approach for calculating the truck-induced fatigue damage accumulation includes three steps (Chen et al. 2011; Zhang and Cai 2011; Wang et al. 2013). Initially, an individual truck-induced stress history of the bridge member is evaluated in a finite element model. Subsequently, a number of stress blocks are converted from the stress history based on a rain-flow method. Finally, the fatigue damage accumulation is evaluated based on the Miner’s formulation illustrated above. For the study of stochastic traffic load effect, the conventional approaches are time consuming due to the long time computer runs under a larger number of truck samples. Due to this reason, this study presents an efficient framework to improve the computational efficiency.
It is observed that the large number of random truck samples leads to the repeating computing problem. Thus, a meta-model can be utilized to replace the finite element model analysis. This study utilizes artificial neural networks as a meta-model due to the learning efficiency and nonlinear properties of neural networks. Figure 5 summarizes the main framework of evaluating fatigue stress spectrum utilizing neural networks.

Flowchart of the proposed computational framework
The procedures in Fig. 5 are descripted as follows: Initially, conduct the stochastic truck load simulation, where the example can be found in the above illustration. Subsequently, several meta-models, description the relationship between the truck loads and corresponding fatigue stress ranges are approximated using neural networks. This step is the kernel procedure in the computational framework, and detailed explanations of the procedure are shown below.
Generally, the idea of neural networks approach comes from the combination of the uniform design (UD) and radial basis function neural networks (shown in Fig. 6) that was conventionally used for structural reliability analysis with implicit performance functions (Cheng 2010; Liu et al. 2016). However, this study utilizes the neural network as a meta-model to approximate the relationship between truck axle weights and structural stress blocks. Correspondingly, the input parameters in Fig. 6 are the axle weights for a vehicle type. A total number of 6 meta-models are essential corresponding to 6 types of vehicles. Based on the theoretical basis, it is easy to implement the neural networks for fatigue stress estimation. Firstly, generate a small number of uniformly distributed truck samples between the upper and lower bound of the GVWs of each type of vehicles. Secondly, input the truck samples to the bridge finite element model to analysis the stress histories for each truck passing on the bridge deck, which will be subsequently proceed via the ran-flow counting approach. In addition, the equivalent stress blocks are generated based on Eq. (4), which are out parameters related to truck axle weights. Finally, as the input and output parameters are obtained, neural networks which are used to approximate the response function between the input parameters (axle weights) and the output parameters (stress ranges). The kernel functions and the number of training samples are the important factor impacting the efficiency and accuracy of the neural network training. These influences are investigated in the case study.

Diagram of a RBF neural network
With the meta-model, the large number of truck samples can be converted into fatigue stress cycles efficiently, and then the probabilistic modeling of the fatigue stress can be subsequently conducted. In order to capture the truck overloading induced multi-peaks characters of the stress spectrum, the GMM is utilized to approximate the histograms of stress ranges. As discussed in the vehicle load modeling, the GMM can capture the bimodal and trimodal distribution behavior. Herein, the GMM includes this information in the stress spectrum. Therefore, the GMM has accurately captured the probabilistic characteristics of both the truck overloading and the stress spectrum.
5 Case Study
An orthotropic steel deck in a long-span suspension bridge is chosen to apply the computational framework. Influence of the number of training sample computational accuracy is investigated. Fatigue reliability assessment is conducted considering traffic growth and control measures.
5.1 Bridge Details
The prototype bridge is a long-span suspension bridge with orthotropic steel decks in Sichuan, China (Liu et al. 2015). Sine a large number of heavy trucks pass on the bridge as observed from the WIM data, the fatigue safety of the steel bridge deck is a noticeable problem. It is necessary to evaluate the fatigue reliability of the orthotropic steel deck using site-specific traffic data.
Dimensions of the bridge and welded details are shown in Fig. 7. Since an orthotropic streel deck has lots of welded joints that are fatigue-critical locations, a refine finite model is essential for capture the fatigue behavior of welded details. This study utilized a multi-scale ANSYS model as shown in Fig. 8 to consider the large-scale and small-scale effects due to traffic flows and wheel loads. In the large-scale model, the bridge girders and pylons were modeled by Beam188 elements, and the cables were modeled by Link8 elements. In the small-scale model, all of the steel elements were modeled by Shell 63 elements. The bridge deck elements in the traffic lane were meshed with 15 cm × 15 cm square grids, and the other deck elements were meshed with 30 cm × 15 cm square grids. The U-ribs and diaphragm plates elements were meshed with free triangle grids.

Dimensions of Nanxi suspension bridge: a overall view; b a half cross-section; and c U-rib

Finite element models of a segmental steel box-girder in a suspension bridge: a global model; b local model
5.2 Finite-Element Simulation
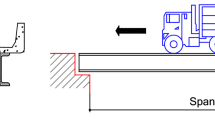
The local model is in the mid-span point of the global model. The influence lines of fatigue-critical joints were analyzed to find the worst case of truck loading on the bridge deck as shown in Fig. 9. The following conclusions can be inferred from Fig. 9: firstly, the effective loading area on the bridge deck of for the stress is within two diaphragm plates with a length of 3 m; secondly, traffic loads in different driving lanes have slight influence on each other. On this basis, it is feasible to consider the traffic parameters that the vehicle configuration, the vehicle axle weight have significant influence on the fatigue stress. On the contrary, the vehicle spacing can be ignored since the actual vehicle spacings are usually much larger than the effective loading length.

Stress influence lines of welded joints: a longitudinal; b transverse
In order to accurately simulate the wheel load on the bridge deck, each wheel load was considered by a uniformly distributed load, and the pavement effect was also included according to the approach provided by Guo et al. (2008). Considering two V6 vehicles with the lowest and highest GVWs passing on the bridge deck, separately, the corresponding stress histories of the U-rib detail were analyzed in the finite element model. Figure 10 plots the stress-time curves induced by a standard 6-axle truck with GVW of 550 kN.

Stress-time histories of the rib-to-deck joint under the 6-axle truck load
As observed from Fig. 10, there are 6 peaks corresponding to the 6 axles of the truck for each joint. Each variant-amplitude stress cycle is posed by an axle load. For a 2-axle truck, 20 training data were designed as uniformly distributed samples. With 20 times of computer runs each equivalent stress ranges were obtained. The axle weight and the equivalent stress range are input and output data for of the response function. The “newrbe” function in MATLAB was used to train the RBF neural network, where the number of neurons equaled to the number of input samples, and the kernel function is the Gaussian function. The response function of the approximated neural network for two-axle trucks is shown in Fig. 11.

Response surface of the stress range under the 2-axle truck load
It can be seen from Fig. 11 that the training samples have filled the space uniformly, and the nonlinear response surface fits the samples well. It is acknowledged that the accurate of the meta-model is affected by the number of training samples, which will also determine the computational effort. Therefore, influence of the number of training samples on the accuracy of the meta-model was analyzed. The accuracy of the meta-model was reflected by the roots mean square error (RMSE) of 100 random samples following uniform distribution. The roots-mean-square-error of the approximated neural network of the 2-axle truck (V2) and the 6-axle truck (V6) is shown in Fig. 12.

Influence of the number of training samples on the RMSE of stress ranges
As observed from Fig. 12, the 6-axle truck needs more training samples to ensure the accuracy of the meta-model. The 6-axle truck model includes 3 independent axle loads variables: the front axle load, the tandem axle and the tridem axle. Under the accuracy criterion of 0.1 MPa, the 2-axle and 6-axle truck model needs 20 and 40 samples respectively. Therefore, the 6 types of truck load model need 180 training samples. The entire finite-element computational effort for a core-7 computer is roughly 2 h. However, without the meta-model, one-day traffic including averagely 2 thousands trucks needs 22 h. The computational effort for a 100-day traffic analysis is unimaginable without the meta-model. With 6 types of trained neural networks, the 100-day stochastic traffic loads were translated into stress ranges.
5.3 Fatigue Reliability Evaluation
The 100-day stress blocks were plotted as histograms, and the stress ranges and the number of daily cycles were fitted with a GMM and a Gaussian function, respectively. Figure 13 shows the fitted curves and the corresponding parameters. It is clear that the GMM rather than the Gaussian model fits the histogram accurately. It is the advantage of the GMM that it can capture the overloading characters, and then captures multi-peak feature the stress spectrum due to actual traffic load.

Histograms and PDFs of the rib-to-deck joint under the stochastic truck load: a stress range, and b number of daily cycles
The statistics of the variables in the LSF are shown in Table 3. In order to consider the traffic growth on the bridge in the lifetime, suppose the average growth rates of traffic volume and vehicle weights is 0.5%. Influence of the traffic growth rate on the fatigue reliability is shown in Fig. 14. It is thus observed that the fatigue reliability index decreases with the increase of the traffic volume and the vehicle weight. For the case that the growth rate for traffic volume and vehicle weight are both 0.5%, the lifetime fatigue reliability of the welded joint in the bridge deck decrease from 5.94 to 2.87 m and 0.92, respectively.

Fatigue reliability index of the rib-to-deck joint under traffic growth: a ADTT; b GVW
In practice, the traffic growth effect can be explained by the limit state function, where the vehicle weight has a 5-power impact on the fatigue damage. On the contrary, if the overload trucks were controlled to pass on the bridge, the fatigue reliability of the bridge deck should has a remarkable increase. In order to verify this supposition, a overloading threshold is added to investigate the overloading control measure on the fatigue reliability. According to the national truck overloading control specification (MOCAT 2004), the maximum vehicle weight for 6-axle trucks are 550 kN. Herein, consider the threshold overloading rate as 0.25, 0.5, 0.75 and 1, and then remove the controlled trucks from the stochastic traffic flow. The fatigue reliability index of the bridge was reevaluated as shown in Fig. 15.

Influence of the threshold overload rate on the fatigue reliably index
It is observed from Fig. 15 that the truck overloading control has a prominent positive effect on the fatigue reliability index. Under the actual fact that the traffic volume growth rapidly in developing countries, the truck overloading control has a remarkable effect on ensuring the fatigue reliability of the bridge deck. However, a much more strict control measure seems less effective.
6 Conclusions
This study utilized stochastic truck loads simulated to estimate the fatigue safety of steel bridge decks based on site-specific traffic data. In order to overcome the computational demanding problem, a meta-model approximated by neural networks was utilized to solve the time-consuming problem in the finite element simulation runs. In the probabilistic modeling, the GMM was utilized for accurately capturing the probabilistic characteristics of truck overloading and the corresponding stress spectrum. The following conclusions are drawn:
-
1.
The stochastic traffic flow is demonstrated as an effective approach for converting the probabilistic characteristics of the site-specific traffic data into the fatigue stress spectrum modeling of steel bridge decks. The probabilistic characteristics was has accurately captured by the GMM. In addition, the traffic growth and control measures can be considered in the stochastic traffic flow for lifetime fatigue reliability estimation of the bridge deck.
-
2.
With the meta-model approximated by neural networks, the computational effort for fatigue stress spectrum analysis is greatly reduced. However, the computational accuracy and efficiency are associated with the number of training sample. With considering a uniform design scheme, a total number of 20–40 samples are recommended for a type of trucks, where 180 samples are essential for the entire truck types.
-
3.
The decrease of the fatigue reliability is highly depended on the growth rate of vehicle weights, where an average annual growth rate of 0.5% leads to the fatigue reliability index decrease from 5.94 to 0.92. On the contrary, the traffic volume growth has a relative slight influence on the fatigue reliability index. Thus, the truck overloading is a dominant factor impacting the fatigue safety of steel bridges. Under the actual case that the traffic volume grows rapidly in developing counties, the truck overloading control has a remarkable effect on ensuring bridge fatigue safety. This numerical result may provide a theoretical basis for future traffic management.
An advanced approximating approach instead of the neural networks can be investigated for more efficient modeling of the fatigue stress spectrum. The sensitivity of finite element sizes and types on the fatigue stress range deserves further investigation. In addition, the road roughness can amplify the vehicle-induced stress ranges, and thus a vehicle-bridge interaction model seems necessary to study the dynamic effect of truck loads. Finally, more WIM data will be utilized to calibrate the conventional fatigue truck-load in national design specification, where the stochastic traffic flow is also effective.
References
Chen, Z. W., Xu, Y. L., Xia, Y., Li, Q., & Wong, K. Y. (2011). Fatigue analysis of long-span suspension bridges under multiple loading: case study. Engineering Structures, 33(12), 3246–3256.
Cheng, B., Cao, X., Ye, X., & Cao, Y. (2017a). “Fatigue tests of welded connections between longitudinal stringer and deck plate in railway bridge orthotropic steel decks. Engineering Structures, 153, 32–42.
Cheng, B., Ye, X., Cao, X., Mbako, D. D., & Cao, Y. (2017b). Experimental study on fatigue failure of rib-to-deck welded connections in orthotropic steel bridge decks. International Journal of Fatigue, 103, 157–167.
Cheng, J. (2010). An artificial neural network based genetic algorithm for estimating the reliability of long span suspension bridges. Finite Elements in Analysis and Design, 46(8), 658–667.
Cui, C., Bu, Y., Bao, Y., Zhang, Q., & Ye, Z. (2017). Strain energy-based fatigue life evaluation of deck-to-rib welded joints in OSD considering combined effects of stochastic traffic load and welded residual stress. Journal of Bridge Engineering, 23(2), 04017127.
Deng, L., He, W., Yu, Y., & Cai, C. S. (2018). Equivalent shear force method for detecting the speed and axles of moving vehicles on bridges. Journal of Bridge Engineering, 23(8), 04018057.
Dung, C. V., Sasaki, E., Tajima, K., & Suzuki, T. (2015). Investigations on the effect of weld penetration on fatigue strength of rib-to-deck welded joints in orthotropic steel decks. International Journal of Steel Structures, 15(2), 299–310.
European Committee for Standardization (ECS). (2005). Eurocode 3: Design of steel structures—Part 1-9: Fatigue EN1993-1-9. Brussels: Belgium.
Frangopol, D. M., Strauss, A., & Kim, S. (2008). Bridge reliability assessment based on monitoring. Journal of Bridge Engineering, 13(3), 258–270.
Fu, Z., Ji, B., Zhang, C., & Li, D. (2018). Experimental study on the fatigue performance of roof and U-rib welds of orthotropic steel bridge decks. KSCE Journal of Civil Engineering, 22(1), 270–278.
Gokanakonda, S., Ghantasala, M. K., & Kujawski, D. (2016). Fatigue sensor for structural health monitoring: Design, fabrication and experimental testing of a prototype sensor. Structural Control and Health Monitoring, 23(2), 237–251.
Guo, T., & Chen, Y. W. (2013). Fatigue reliability analysis of steel bridge details based on field-monitored data and linear elastic fracture mechanics. Structure and Infrastructure Engineering, 9(5), 496–505.
Guo, T., Frangopol, D. M., & Chen, Y. (2012). Fatigue reliability assessment of steel bridge details integrating weigh-in-motion data and probabilistic finite element analysis. Computers & Structures, 112, 245–257.
Guo, T., Li, A., & Wang, H. (2008). Influence of ambient temperature on the fatigue damage of welded bridge decks. International Journal of Fatigue, 30(6), 1092–1102.
Han, Y., Li, K., He, X., et al. (2018a). Stress analysis of a long-span steel-truss suspension bridge under combined action of random traffic and wind loads. Journal of Aerospace Engineering, 31(3), 04018021.
Han, Y., Shen, L., Xu, G., Cai, C. S., Hu, P., & Zhang, J. (2018b). Multiscale simulation of wind field on a long-span bridge site in mountainous area. Journal of Wind Engineering and Industrial Aerodynamics, 177, 260–274.
Han, Y., Liu, S., Cai, C. S., et al. (2015). The influence of vehicles on the flutter stability of a long-span suspension bridge. Wind & Structures An International Journal, 20(2), 275–292.
Ji, B., Liu, R., Chen, C., Maeno, H., & Chen, X. (2013). Evaluation on root-deck fatigue of orthotropic steel bridge deck. Journal of Constructional Steel Research, 90, 174–183.
Lalthlamuana, R., & Talukdar, S. (2013). Rating of steel bridges considering fatigue and corrosion. Structural Engineering and Mechanics, 47(5), 643–660.
Liu, Y., Deng, Y., & Cai, C. S. (2015). Deflection monitoring and assessment for a suspension bridge using a connected pipe system: A case study in China. Structural Control and Health Monitoring, 22(12), 1408–1425.
Liu, Y., Lu, N., & Yin, X. (2016). A hybrid method for structural system reliability-based design optimization and its application to trusses. Quality and Reliability Engineering International, 32(2), 595–608.
Lu, N., Noori, M., & Liu, Y. (2017). Fatigue reliability assessment of welded steel bridge decks under stochastic truck loads via machine learning. Journal of Bridge Engineering, 22(1), 04016105.
Marques, F., Moutinho, C., Hu, W. H., Cunha, Á., & Caetano, E. (2016). Weigh-in-motion implementation in an old metallic railway bridge. Engineering Structures, 123, 15–29.
Miner, M. (1945). Cumulative damage in fatigue. Journal of Applied Mechanics, 12(3), 159–164.
Ministry of Communications and Transportation (MOCAT). (2004). Limits of dimensions, axle load and masses for road vehicles GB 1589-2004. Beijing: China Communications Press.
OBrien, E. J., Cantero, D., Enright, B., & González, A. (2010). Characteristic dynamic increment for extreme traffic loading events on short and medium span highway bridges. Engineering Structures, 32(12), 3827–3835.
OBrien, E. J., & Enright, B. (2013). Using weigh-in-motion data to determine aggressiveness of traffic for bridge loading. Journal of Bridge Engineering, 18(3), 232–239.
Sim, H. B., & Uang, C. M. (2012). Stress analyses and parametric study on full-scale fatigue tests of rib-to-deck welded joints in steel orthotropic decks. Journal of Bridge Engineering, 17(5), 765–773.
Wang, D., Zhang, D., Wang, S., & Ge, S. (2013). Finite element analysis of hoisting rope and fretting wear evolution and fatigue life estimation of steel wires. Engineering Failure Analysis, 27, 173–193.
Xia, H. W., Ni, Y. Q., Wong, K. Y., & Ko, J. M. (2012). Reliability-based condition assessment of in-service bridges using mixture distribution models. Computers & Structures, 106, 204–213.
Ye, X. W., Ni, Y. Q., Wong, K. Y., & Ko, J. M. (2012). Statistical analysis of stress spectra for fatigue life assessment of steel bridges with structural health monitoring data. Engineering Structures, 45, 166–176.
Ye, X. W., Su, Y. H., & Xi, P. S. (2018). Statistical analysis of stress signals from bridge monitoring by FBG system. Sensors, 18(2), 1–14.
Ye, X. W., Yi, T. H., Wen, C., & Su, Y. H. (2015). Reliability-based assessment of steel bridge deck using a mesh-insensitive structural stress method. Smart Structures and Systems, 16(2), 367–382.
Zhang, J., & Au, F. (2016). Fatigue reliability assessment considering traffic flow variation based on weigh-in-motion data. Advances in Structural Engineering. https://doi.org/10.1177/1369433216646011.
Zhang, W., & Cai, C. S. (2011). Fatigue reliability assessment for existing bridges considering vehicle speed and road surface conditions. Journal of Bridge Engineering, 17(3), 443–453.
Zhao, J., & Tabatabai, H. (2012). Evaluation of a permit vehicle model using weigh-in-motion truck records. Journal of Bridge Engineering, 17(2), 389–392.
Zhou, Y., & Chen, S. (2015). Dynamic Simulation of a long-span bridge-traffic system subjected to combined service and extreme loads. Journal of Structural Engineering. https://doi.org/10.1061/(ASCE)ST.1943-541X.0001188.
Zhu, J., & Zhang, W. (2018). Probabilistic fatigue damage assessment of coastal slender bridges under coupled dynamic loads. Engineering Structures, 166, 274–285.
Acknowledgements
The support from the National Basic Research Program of China (Grant No. 2015CB057705), and the Hunan Science Foundation (2018JJ3540) are highly acknowledged. The opinions and conclusions expressed in the paper are those of the authors and do not necessarily represent the views of the sponsors.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Lu, N., Liu, Y. & Deng, Y. Fatigue Reliability Evaluation of Orthotropic Steel Bridge Decks Based on Site-Specific Weigh-in-Motion Measurements. Int J Steel Struct 19, 181–192 (2019). https://doi.org/10.1007/s13296-018-0109-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13296-018-0109-8