
Abstract
Multimachine systems are complex power systems consisting of multiple generators, loads, and transmission lines. In these kinds of systems, maintaining stability is a difficult task. Different damping controllers, like the power system stabilizer and FACTS controllers, are used to maintain stability. The design of the control scheme ensures that the PSS and SSSC work together in a coordinated manner. The controller parameter is optimized by using metaheuristic methods. In this work, a salp swarm algorithm (SSA) is proposed to tune the controller parameters for the multi-machine system. The statistical analysis is carried out to assess the performances of the SSA method against some other promising methods. The objective of this work is considered as minimization of rotor speed deviation. The rotor speed deviation is suppressed by using SSA tuned damping controllers. The mean rotor speed deviation obtained using SSA is 0.000601 pu. Using MATLAB simulation, the performance of multi-machine system is examined in terms of speed deviation between inter-area and local-area, injected voltage, and tie-line power. The simulation result suggests the supremacy of SSA over other methods considered for comparative study.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Power system stability (Kundur 1994) refers to the ability of an electrical power system to maintain a steady and balanced state of operation under normal and abnormal conditions. In other words, it is the ability of the power system to maintain the voltage and frequency within acceptable limits despite disturbances such as sudden changes in demand or faults. PSS devices are installed in generators to improve stability by injecting damping signals into the system (Bhattacharya et al. 1997). The PSS device senses the generator’s rotor angle and adjusts the generator’s excitation system to damp out oscillations and improve stability. In addition to PSS, FACTS devices are used for stability analysis because they can control the voltage, phase angle, and impedance of power transmission lines, which helps to maintain stability. These devices improve stability by providing reactive power compensation (Kar et al. 2021b; Kumar et al. 2022), which helps to maintain voltage levels and reduce likelihood of voltage collapse. They can also provide damping of power oscillations, which can help to prevent system instability due to resonances or other disturbances. FACTS devices can be installed in power systems to regulate voltage and power flow. FACTS devices can help to improve stability in a multimachine systems by providing rapid and precise voltage regulation and damping control (Murali et al. 2010). FACTS devices are an important tool for ensuring the stability and reliability of power systems (Kar et al. 2022), and their use in stability analysis is an essential part of modern power system engineering.
In recent years, the coordinated control of PSS and FACTS devices are popularly used to enhance the stability of power systems. The basic idea behind coordinated control of PSS and FACTS is to use the PSS to damp out low-frequency oscillations, while using the FACTS device to mitigate high-frequency oscillations. Coordinated control involves the use of centralized control systems to regulate the power system’s behaviour by adjusting generator output, excitation, and load shedding response to system disturbances. Coordinated control can help maintain power system stability by ensuring that all generators operate within their limits and that there is a balanced load in the system. The coordinated control of PSS and SSSC can improve the stability of power system by providing damping to oscillations and controlling the power flow in the system (Cai & Erlich 2005; Du et al. 2021; Gholipour & Nosratabadi 2015; Alomoush 2017). In decentralized control scheme, the PSS and FACTS controllers operate independently, but their output signals are combined to achieve coordinated control. Sahu et al. (2021) suggested a novel cascaded fractional order PI-PD structure for power system stabilisers and FACTS based damping controllers to improve power system stability.
In recent years, the metaheuristic algorithms are popularly used for finding the optimal values of control parameters. These techniques are used to optimize the control variables of PSS and FACTS devices to enhance system stability. Some common optimization techniques used for power system stability analysis of multimachine power systems include, DE (Sidhartha Panda 2011);GA (Sidhartha Panda 2009; Do Bomfim et al. 2000), where the optimization process is modelled after the process of natural selection, where the fittest solutions are selected and used to generate new solutions; PSO (Panda et al. 2008) based on the behaviour of a flock of birds, where the particles represent the control parameters of the devices and move towards the optimal solution; Seeker Optimization Algorithm (Gholipour & Nosratabadi 2015), modified Whale Optimization Algorithm (Sahu et al. 2019), modified Sine Cosine Algorithm (Kar et al. 2021a). A time delay approach is presented by Sahu et al. (2022) to improve the power system stability.
In this work, SSA is proposed to tune the control parameters of a multi-machine power system. Four competitive algorithms, such as PSO, DE, ALO, and SCA, are used as comparative methods. The superiority of SSA is evaluated by considering a three machine, six bus test system. The simulation responses of different parameters justify the efficacy of SSA method over other methods.
The paper is organized as following. Section 2 describes the system under study. Section 3 provides a definition of a problem statement. Section 4 explains the proposed method. Section 5 provides an explanation of the results, and Sect. 6 concludes the findings.
2 System under study
The stability of power system is analysed by considering a multimachine power system (MMPS), which is described as follows:
2.1 Multimachine power system (MMPS)
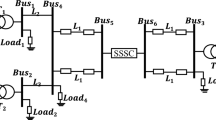
This system has six numbers of buses, four numbers of loads, and three numbers of generators. The generators form two sub-sections that are interlinked by a tie-line. Figure 1 shows the MMPS organizational structure. The swinging between two buses when disturbances occur causes system instability. To improve stability, a series FACTS device namely SSSC is connected. Each of the three generators has its own PSS, which provides stabilized voltage. The use of PSS and SSSC improves system stability by suppressing local and interarea oscillations.

Structure of MMPS
2.2 Power system stabilizer
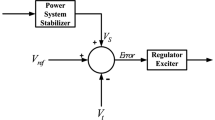
A power system stabilizer (PSS) is a device that is used to improve the stability of a power system, particularly during transient disturbances. The PSS receives speed deviations as input signals and provides the appropriate amount of excitation to apply to the generator. The PSS is designed using a lead-lag compensation strategy to provide damping to the low-frequency modes of the system. PSS is an essential component of modern power systems, as it helps to prevent the occurrence of large disturbance and blackouts. Without a PSS, a generator may experience unstable oscillations that can cause significant damage to the equipment and the power grid. The PSS is a critical component in ensuring the reliable and stable operation of power systems. The structure of PSS is shown in Fig. 2.

Structure of PSS
2.3 Static synchronous series compensator
A static synchronous series compensator (SSSC) is a device used in power systems to regulate and control power flow through a transmission line. The SSSC is a voltage source converter-based device that is connected in series with the transmission line. It has the ability to inject a controllable voltage into the line, helping to control the power flow by regulating the line’s impedance. The structure of SSSC is shown in Fig. 3.

Structure of SSSC
The SSSC uses high power electronics to convert AC power into DC power and then back into AC power with a variable voltage and phase angle. This allows the SSSC to provide capacitive or inductive reactive power to the transmission line, depending on the system requirements. The SSSC can also provide active power to the line, which can be used to improve power quality and voltage stability. SSSC can also provide active power compensation and voltage support, which can improve system stability and power quality. SSSC provides fast and effective control of the high-frequency modes.
The adjustable voltage (Vq) injection by SSSC, which is coupled in series with the power system's transmission lines, virtually compensates for the line impedance. Due to its ability to duplicate the reactance of an inductor or a capacitor, the quadrature component of line current influences power flow in transmission lines regardless of line current magnitude. As a DC voltage source, the capacitor is connected to the direct current side of the VSC. This DC voltage source is then used to generate AC voltage via forced commutated power electronics devices. The amount to which the transmission lines are compensated is determined by the dynamic regulation of the polarity and magnitude of Vq.
3 Problem statement
The ITAE of the speed deviations w.r.t. local and interarea modes is considered as the objective function and can be expressed as Eq. (1).
where \(\Delta {\omega }_{L}\) and \(\Delta {\omega }_{I}\) represents speed deviations of local area and interarea respectively.
The problem can be stated as
Subject to
where \(K\) is the gain and \(T\) is the Time constant. The subscript \(s\) is used for SSSC and \(p\) is used for PSS. The limits of \(K\) and \(T\) is given in Eq. (2).
4 Proposed method
In this work, salp swarm algorithm is proposed for stability analysis. The salp swarm algorithm (SSA) is a metaheuristic optimization algorithm that is inspired by the behaviour of salps, which are a type of planktonic marine organism. The several advantages of SSA algorithm such as simplicity, fast convergence, population diversity, efficient exploration and exploitation capability, scalability, versatility, fewer assumptions and high accuracy makes this algorithm more popular. SSA is used to solve optimization problems in various fields, including engineering, science, and economics.
The SSA algorithm mimics the natural behaviour of salps, which are known for their unique collective behaviour and self-organizing abilities. Salps move by contracting and expanding their bodies, and this behaviour is modelled in the SSA as a mechanism for exploration and exploitation of the search phase.
In the SSA algorithm, a population of virtual salps is randomly initialized in the search space, and their movement and behaviour are simulated based on mathematical equations that mimic the natural behaviour of real salps. The algorithm iteratively updated the position and velocity of the salps based on their individual fitness and the collective behaviour of the swarm. The best solution found by the swarm is retained as the optimal solution. The flowchart of SSA is shown in Fig. 4.

Flowchart of SSA
Steps
-
(i)
Initialize the position of search agent, and number of control variables.
-
(ii)
The target of the swarm is assumed as food source F.
-
(iii)
The position is updated by the leader salp w.r.t. food source using Eq. 3.
$${x}_{j}=\left\{\begin{array}{c}{F}_{j}+{c}_{1}(\left({U}_{j}-{L}_{j}\right){c}_{2}+{L}_{j}){c}_{3}\ge 0\\ {F}_{j}-{c}_{1}(\left({U}_{j}-{L}_{j}\right){c}_{2}+{L}_{j}){c}_{3}<0\end{array}\right.$$(3)where, \({U}_{j}\) and \({L}_{j}\) are the upper and the lower limits of control variables in the jth dimension. \({F}_{j}\) is the position of the food source, \({c}_{2}\) and \({c}_{3}\) are the random variable in range [0, 1].
-
(iv)
The trade between exploration and exploitation is maintained by \({c}_{1}\) using Eq. 4.
$${c}_{1}=2{e}^{-{\left(\frac{4t}{{T}_{max}}\right)}^{2}}$$(4) -
(v)
The updated position is determined by using Eq. 5.
$$ x_{j}^{i} = \frac{1}{2}\left( {x_{j}^{i} + x_{j}^{i - 1} } \right)\quad i \ge 2 $$(5)
SSA has been effectively used in various engineering applications due to its effectiveness in solving optimization problems. It is important to consider contemporary algorithms as well. Some engineering applications of SSA and their contemporary counterparts are as follows:
-
1.
Optimization of electrical power systems SSA has been applied to optimize the operation and planning of electrical power systems. It can help in determining the optimal power flow, unit commitment, economic dispatch, and reactive power planning. Other metaheuristic algorithms such as PSO and GA are commonly used in power system optimization.
-
2.
Image processing and pattern recognition SSA has been used for image enhancement, image segmentation, feature selection, and pattern recognition tasks. It can help in improving image quality, extracting meaningful features, and classifying objects. Convolutional Neural Networks (CNNs) are widely used in image processing and pattern recognition tasks due to their ability to learn complex features directly from raw data.
-
3.
Wireless sensor networks SSA can be utilized to optimize the deployment of wireless sensor networks (WSNs) by finding the optimal locations for sensor nodes. It helps in achieving better coverage, connectivity, and energy efficiency in WSNs. Other swarm intelligence-based algorithms like PSO and ACO are commonly used for WSN deployment optimization.
-
4.
Structural optimization SSA has been employed for optimizing the design of various structures, including trusses, beams, and frames. It can help in finding the optimal configuration of structural components to minimize weight, maximize strength, or satisfy specific constraints. Evolutionary algorithms such as GA and DE are widely used in structural optimization problems.
-
5.
Data clustering and classification SSA can be utilized for data clustering and classification tasks. It helps in grouping similar data points together or assigning data points to different classes based on their characteristics. K-means clustering, Support Vector Machines (SVM), and Random Forests are some of the popular contemporary methods used for data clustering and classification.
4.1 Performance evaluation of the proposed method
The statistical analysis is performed to evaluate the efficacy of the proposed method over other comparative methods. The analysis is shown in Table 1.
5 Results
For the performance analysis of damping controller, the developed MMPS model is simulated in a MATLAB environment. The model consists of three machines and tie lines, as shown in Fig. 5. The SSSC is incorporated between buses 5 and 6. A three phase, self-clearing fault is applied. This fault is considered for three cycles. The system is restored once the fault is cleared. The system performance such as speed deviation between machines 1 and 3, speed deviation between machines 1 and 2, speed deviation between machines 2 and 3, injected voltage, and tie-line power, is shown in Figs. 6, 7, 8, 9 and 10 respectively. The figures suggest that the oscillations are significantly improved when the damping controllers are used. The supremacy of SSA based damping controllers is observed. The fitness values using different metaheuristic methods are shown in Table 2. Table 3 shows the optimal values of controller parameters for the different optimization methods considered.

MATLAB Simulink model of MMPS incorporated with SSSC

Speed deviation between machine 1 and 3

Speed deviation between machine 1 and 2

Speed deviation between machine 2 and 3

Injected voltage by SSSC

Tie-line power response
6 Conclusion
The current work extensively investigates the improvement of power system stability in a multi-machine system through the coordinated use of various damping controllers. In order to solve the proposed controller design challenge, a time-domain objective function is used to damp the oscillations of the power system. The controller parameters are then properly tuned using an SSA technique. The mean rotor speed deviation obtained from SSA was 0.000601pu. Additionally, the statistical analysis for different unimodal and multimodal functions is performed to assess the effectiveness of the proposed method. The study measured the performance of SSA in terms of convergence speed and solution quality. The results presented in the study showed that SSA outperformed other optimization algorithms on a wide range of benchmark functions. The numerical evidence indicated that SSA had a faster convergence speed and obtained solutions that were closer to the global optima. The proposed damping controllers are found to be robust enough to handle fault sites and fluctuations in operating conditions. The results of simulation using the suggested method demonstrate that the SSA-optimized controller outperforms the well-known PSO, DE, ALO, and recently proposed SCA-optimized controllers. The simulation results demonstrate that the presence of FACTS device mitigate instability and improve the system response. Hence, such a controller can be easily adapted for use in the power system applications.
References
Alomoush M (2017) Concurrent optimal design of TCSC and PSS using symbiotic organisms search algorithm. Turk J Electr Eng Comput Sci 25(5):3904–3919. https://doi.org/10.3906/elk-1703-147
Bhattacharya K, Nanda J, Kothari ML (1997) Optimization and performance analysis of conventional power system stabilizers. Int J Electr Power Energy Syst 19(7):449–458. https://doi.org/10.1016/s0142-0615(97)00015-x
Cai LJ, Erlich I (2005) Simultaneous coordinated tuning of PSS and FACTS damping controllers in large power systems. IEEE Trans Power Syst 20(1):294–300. https://doi.org/10.1109/TPWRS.2004.841177
Do Bomfim ALB, Taranto GN, Falcâo DM (2000) Simultaneous tuning of power system damping controllers using genetic algorithms. IEEE Trans Power Syst 15(1):163–169. https://doi.org/10.1109/59.852116
Du W, Dong W, Wang Y, Wang H (2021) A method to design power system stabilizers in a multi-machine power system based on single-machine infinite-bus system model. IEEE Trans Power Syst 36(4):3475–3486. https://doi.org/10.1109/TPWRS.2020.3041037
Gholipour E, Nosratabadi SM (2015) A new coordination strategy of SSSC and PSS controllers in power system using SOA algorithm based on Pareto method. Int J Electr Power Energy Syst 67:462–471. https://doi.org/10.1016/j.ijepes.2014.12.020
Kar MK, Kumar S, Singh AK, Panigrahi S (2021a) A modified sine cosine algorithm with ensemble search agent updating schemes for small signal stability analysis. Int Trans Electr Energy Syst. https://doi.org/10.1002/2050-7038.13058
Kar MK, Kumar S, Singh AK, Panigrahi S (2021b) Reactive power management by using a modified differential evolution algorithm. Opt Control Appl Methods. https://doi.org/10.1002/oca.2815
Kar MK, Kumar S, Singh AK, Panigrahi S, Cherukuri M (2022) Design and analysis of FOPID-based damping controllers using a modified grey wolf optimization algorithm. Int Trans Electr Energy Syst 20:22. https://doi.org/10.1155/2022/5339630
Kumar L, Kar MK, Kumar S (2022) Reactive power management of transmission network using evolutionary techniques. J Electr Eng Technol. https://doi.org/10.1007/s42835-022-01185-1
Kundur P (1994). Power system stability and control by prabha Kundur.pdf. In: McGraw-Hill, Inc, p 1167
Murali D, Rajaram M, Reka N (2010) Comparison of FACTS devices for power system stability enhancement. Int J Comput Appl 8(4):30–35. https://doi.org/10.5120/1198-1701
Panda S (2009) Multi-objective evolutionary algorithm for SSSC-based controller design. Electric Power Syst Res 79(6):937–944. https://doi.org/10.1016/j.epsr.2008.12.004
Panda S (2011) Differential evolution algorithm for SSSC-based damping controller design considering time delay. J Franklin Inst 348(8):1903–1926. https://doi.org/10.1016/j.jfranklin.2011.05.011
Panda S, Padhy NP, Patel RN (2008) Power-system stability improvement by PSO optimized SSSC-based damping controller. Electric Power Compon Syst 36(5):468–490. https://doi.org/10.1080/15325000701735306
Sahu PR, Hota PK, Panda S (2019) Modified whale optimization algorithm for coordinated design of fuzzy lead-lag structure-based SSSC controller and power system stabilizer. Int Trans Electr Energy Syst 29(4):1–21. https://doi.org/10.1002/etep.2797
Sahu PR, Hota PK, Panda S, Lenka RK, Padmanaban S, Blaabjerg F (2021) Coordinated design of FACTS controller with PSS for stability enhancement using a novel hybrid whale optimization algorithm-nelder mead approach. Electric Power Compon Syst 49(16–17):1363–1378. https://doi.org/10.1080/15325008.2022.2129860
Sahu PR, Lenka RK, Khadanga RK, Hota PK, Panda S, Ustun TS (2022) Power system stability improvement of FACTS controller and PSS design: a time-delay approach. Sustainability 14(21):14649. https://doi.org/10.3390/su142114649
Funding
The author received no specific funding for this article.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Author doesn’t have any conflict of interest.
Human or animal rights
Research involving Human Participants and/or Animals: Human Participants and/or Animals are not involved in this research.
Informed consent
There was no informed consent in this research article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
-
1.
MMPS:
Generators: SB1=SB3= 2100 MVA, SB2= 4200 MVA, VB= 13.8 kV, f= 60 Hz
Loads: Load 1= Load 3= 250 MW, Load 2= 50 MW
Transformers: 13.8/500 kV, f =60 Hz, SBT1=SBT3= 2100 MVA, SBT2=1400 MVA
Injected voltage magnitude limit: Vq= \(\pm \) 0.2
Machine 1: Pe1= 1280 MW (0.6095 pu)
Machine 2: Pe2 =3480.6 MW (0.8287pu)
Machine 3: Pe3 =880 MW (0.419pu)
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Kar, M.K. Stability analysis of multi-machine system using FACTS devices. Int J Syst Assur Eng Manag 14, 2136–2145 (2023). https://doi.org/10.1007/s13198-023-02044-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-023-02044-6