
Abstract
The extensive implementation of smart utilities in household and business applications have enhanced the embedding of nonlinear electronic components in the majority of devices. The nonlinear load current–voltage (i–v) behaviour lead to the insertion of unproductive higher-order harmonics in the supply mains. This causes time-variant performance deviation of sensitive devices and overall depreciation in power quality factor. Therefore, the overall system performance is subjected to reliability issues and viable to fault occurrence. This paper proposes a stable transformerless hybrid shunt active power filter for mitigation of higher-order harmonics from the main power supply. The methodology consists of modelling, iteration and time-variant analysis of power system model at linear and non-linear load. The PI, PID and Fuzzy supervised shunt active power filter (SAPF) are designed, analysed and implemented into a nonlinear load system. The three controller performances are compared and validated with a trade-off between design complexities. Among the three proposed model fuzzy supervised and PID SAPF offers 0.49% of total harmonic distortion (THD) in supply mains. The two models are adequate to use as per the IEEE-519 standards permissible limit (less than 5%). Hence, the implementation of the proposed filter technique to commercial and non-commercial non-linear load devices reduces the harmonic distortion, enhances the power factor and improves the system reliability.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The use of electronic components is increasing very rapidly and this leads to the insertion of non-linear i–v characteristics in electrical power mains. This may cause poor power quality issues on both sides in the transmission and distribution of electrical power system. Linear loads draw purely sinusoidal current from power mains and the presence of higher-order harmonics is negligible (Kanjiya et al. 2013). Under similar constraints, nonlinear load generates higher-order harmonics in the supply mains and leads to severe distortion in the current waveform. The nonlinear i–v characteristic of electronic components is the responsible factor of depreciation in power quality. The presence of current harmonic affects the other sensitive appliances connected in the system network. This poor power quality issue causes the depreciation in the system reliability directly and parametric deviation. Therefore, it is necessary to reduce these harmonics from the line current and should be maintained below the permissible limit of IEEE standard 519. As per the standards, the permissible value of THD should be less than 5% for reliable system performance. Many researchers reported the power quality issue with the sheer emphasis on various affected parameters (Goswami and Goswami 2021a). Parametric disorder and time-variant analysis are crucial ones. The unequal distribution of alternating single-phase loads brings the problem of rising neutral current and unbalanced line current. Few major issues are shown in Table 1, which causes severe reliability distraction and probable fault occurrence (Goswami and Goswami 2021b).
The electronic components require a regulated dc power supply for smooth operations but due to their non-linear i–v characteristics, the ac ripples are often seen in circulating current. That may be due to voltage flickers or inadequate performance of any of the component of the regulated dc power supply. The throwback effect to supply mains causes the generation of higher-order harmonics. The affected supply current circulates through the complete system network. The sensitive components deviate from their adequate performance. The fault tolerance depends upon the device bandwidth and delicacy of the instrument (Nikum et al. 2016). Therefore, the sequential interference of higher-order harmonics in supply mains termed total harmonic distortion (THD). The mathematical analysis of THD helps to determine the parametric effect on power quality. Besides, such issues low power quality pays poorer efficiency and interferences in nearby communication distribution networks. Commercially, large industries exhibit various non-linear loads for variable frequency drives (VFD) and electrolytic refining in their massive productive applications. The generated harmonics are typically confined and required expert consultations for analysis and rectification. The parametric disorder, reliability issue and false measurement are the major domain of analysis. Initially Passive filters were used to rectify the harmonic distortions in the line current, as they were very simple, low cost, lightweight and easy to install, became more popular in the field of power quality control (Busarello et al. 2016). But, as time has changed the conventional method of filtration is no longer in use because these passive filters along with capacitor banks are tuned for some specified range of frequency also they are not able to perform well during the changes of load or system parameters. Once the passive filters are installed, it does not seem to be economic to change or replace the whole filtration system according to our requirements as they already had a lot of past investments. Alternatively, better solutions were proposed to implement control system design to reduce various issues of power quality in electrical power system, which is based on Y-D MFBT (star-delta multifunction balanced transformer), power quality improvement by THSeAF (Javadi et al. 2016) (a hybrid series active filter), power quality control by the installation of shunt compensators along with the initially installed passive filters and capacitor bank, power electronics converters, power quality control for synchronous reluctance generator fed non-linear load using distribution static compensator (DSTATCOM), active power filter with DG unit connected grid and digital current controller, SAPF based on proportional-integral, proportional-integral-derivative and FLC (Fuzzy Logic Controller) (Hu et al. 2015; Modesto et al. 2015; Varschavsky et al. 2009; Teke et al. 2011; Vijayakumar and Vijayan 2013; Zeng et al. 2014; Blair et al. 2017; Kumar and Kumar 2016; Arya et al. 2015). TS fuzzy controller seems to be relatively robust for versatile range of applications and can be implemented in controller design to reduce THD in supply mains (Lahlou et al. 2019). A SAPF based on proportional-integral, proportional-integral-derivative and FLC (Fuzzy Logic Controller) are the most recent economical approaches for conditioning supply mains under the nonlinear load applications. Effective THD minimization, parametric estimation and uncertainty in harmonic compensation are the major research gap areas (Bhende and Mishra 2006). Previously, the THD control obtained in the literature varies from 5 to 1.49% with due complexities on nonlinear load models. This manuscript analyses the issues of nonlinear loads and proposes the compensation models of PI, PID and fuzzy supervised shunt active power filters (SAPF). The harmonic compensation is proposed with respect nonlinear model and controller actions are analysed for nonlinear fixed model parameter deviation (He and Li 2014; Sinha et al. 2018a). On other hand fuzzy deals with the uncertainty of the environmental load issues. The harmonic current compensation under three supervised controllers is modelled using MatLab v.19 and then evaluated for THD control for similar load conditions. The analysis of total harmonic distortion reveals the parametric estimation of compensation of harmonically distorted current. The conception of the proposed strategy consists of compensation of distorted phase current and hence the overall current modulation for significant reduction of THD (Bonaldo et al. 2016). The proposed methodology shows a novel design of shunt active power filter with iterative control of sequential actions of PI, PID and fuzzy controllers. The successive control strategies help to analyse the tremendous improvement in power quality and system reliability. Therefore, the design and implementation of an adequate filter with an effective controller and stable parametric characteristics validate the novelty of the proposed technique (Goswami 2020; Sinha et al. 2018b; Balamurugan and Nithya 2015).
2 Current compensation model
Figure 1 presents a sytematic block diagram of the controller supervised shunt APF design strategy. The main objective of this scheme is to reduce the presence of harmonic distortions in the line current by evaluation of the present THD. This elimination helps in the generation of the pure in-phase sinusoidal waveform of a current and significant correction in power factor (Jayasankar and Vinatha 2018). An IGBT based bridge converter acts as SAPF and connected as auxiliary converter in shunt with the non-linear load main converter for the necessary rectification of dc regulation.

Block diagram of the proposed model
The SAPF is an auxiliary converter and frequently called as synchronous link converter (SLC). The non-linear component-based main converter is referred to as the main load of the system. This auxiliary converter consists of an IGBT (insulated-gate bipolar junction transistor) of estimated parameters. As a switch, IGBT restricts the power flow by adequate control of the gate terminal signal. This all explores the new control strategy for the generation of harmonic compensation by the feasible response of SAPF. This evolves the design theory of the control circuit to provide an appropriate gate pulse at a precise firing phase angle. The adequate functioning of the controller depends upon the error signal magnitude and frequency of deviation. Therefore, the action of PI, PID and fuzzy is recorded to minimize the error deviation. In response to this gentle action, the shunt APF generates a compensatory phase-synced shunt current to nullify the effect of disordered harmonic current. Additionally, transformerless SLC is used to supply an auxiliary converter for eliminating the need for bulky transformer and input power loss. Table 2 shows the values of configuration parameters that we consider as reference parameters for the proposed circuit model. This includes all the evaluated parameters of controller, load, SAPF, and load characteristics for the prescribed proposed model.
3 Principle of control strategy
The main control strategy covers harmonic compensation through the phase synchronization process. Conceptually, the generated harmonics need to be nullified through adequate inverted phase synched current compensation. At nonlinear load, the higher-order harmonics becomes an inclusive part of the main supply current. The active filters deal in the generation of current compensation but the adequate firing of gate triggered active converter is more challenging. Here, a mathematical model of linear and non-linear load model is formulated. The effect of generation of harmonics due to nonlinear i–v characteristics is illustrated and active action is incorporated through APF triggering.
Mathematical equations describe the phenomenal validation of the compensation strategy and control action. Equation (1) indicates instantaneous values of current and voltage
Is′(t) is the current distortion as shown in Eqs. (2) and (3)


In Eq. 4, we have
-
Active component (IA),
-
Reactive component (IR)
-
Harmonic component (IH)
$$ P_{L} (t) = I_{s} ^{\prime } (t)*V_{s} (t) $$(5)
Further on simplification, this leads to higher-order frequency components in Eq. 6 obtained from Eq. 5. Expending this results in Eqs. 7 and 8, that is the power components present in the system.
In Eq. 8,
-
Active power PF(t),
-
Reactive power PR(t) and
-
Harmonic power PH(t).
PF(t) can calculated as in Eq. 9
where IA (t) is the desired value of current Is′′ (t) drawn by the source so that the active power is given as in Eq. 10
On simplification, Eqs. 10–14 lead to the net resultant desired compensation current after the active filter triggering as shown by Eq. (15).
Finally, the output current of VSI is obtained from Eqs. 16 and 17, is called filter current IF (t), Lf and Cf and a PID controller.
Hence, from the above analysis the load current, IL(t) = \(I_{m} \sin \omega t\), the initial current offers distorted Is′(t) on non-linear load. The distortions of current components are generated as IR(t) and IH(t).
This is rectified compensation through injecting current component IF (t) supplied by SLC. Based on the above analysis the current compensation model is realized and simulated on MatLab for nonlinear load application with controller action. Additionally, the power factor measurement is another crucial attribute to validate the quality of power on nonlinear load application. Interestingly, the determination of THD is a major dependent parameter of power factor measurement. This can be determined with the help of Eq. 18 as distortion power factor (DPF)
Any significant increase in harmonic distortion results in distortion of power factor and therefore the depreciation in the quality factor of the supply power. The proposed model describes this relationship to improve power factor through reduction of THD on implementation controller supervised SAPF.
4 Results and discussions
The parametric modelling of real-time components gives an analytical and iterative approach to a performance measure. The equivalents undergo reliability test by evaluation of waveform conditioning, THD and PF. The analysis follows as.
4.1 Case-1: Linear load model
Figure 2 shows a basic building block of module conceptualization of linear load. A simple model is a circuit approach of most of the common electrical systems. In most cases, sinusoidal ac supply is fed to a linear RLC circuit and it exhibits undistorted line current. At this stage, the FFT analysis of the frequency spectrum shows 0.02% THD.

Linear load model
This analysis reveals the desirable protocols of an efficient electrical power system. Therefore, the deviations of the above standards lead to poor efficiency, performance degradation and severe fault generations. The MATLAB observations carry the study of input voltage, the mainline current and FFT analysis of THD. Figures 3 and 4 expresses the in-phase current–voltage relationship without any distortion and validates the high efficiency of the systems. Also, Fig. 5 shows the negligible presence of higher-order harmonics. The creative designs of the filter are required to optimize the essential parameters in synchronization to this linear model of the electrical power system.

At linear load line current

At linear load supply voltage

At linear load THD
4.2 Case 2: Nonlinear load model
In any electrical system, the non-linearity appears due to the presence of high-speed solid-state device switching. Here, the equivalent of SMPS is assumed as the nonlinear load to the main supply system. The converter is the core key circuit of such non-linear applications. The parameters of the converter are adjusted to about 50 Hz, 12 V, 1.2 A and 15 W adopter specifications.
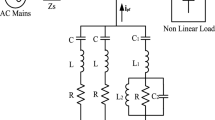
Figure 6 shows the power flow model and probable occurrence of harmonic distortions. Through parametric variation of the converter, analysis shows the severe rise of THD and particularly up to 92%. Figures 7 and 8 show distorted line current and feed voltage respectively. Time variant analysis discloses the severity of the issue. The waveform of the line current concerning supply voltage deviates using high-frequency current ripples and exhibits high THD. Figure 9 shows FFT analysis of the determination of harmonic distortion. All observations at this model created an optimization need and valid compensation model.

Non-linear load model

At nonlinear load line current

At nonlinear load supply voltage

At non linear load THD
4.3 Case 3: Nonlinear load model with shunt APF and PI controller
As an essential feature, the filter should eliminate the unwanted higher-order harmonic components from the supply mains. This section explains the design implementation of a transformerless APF in shunt connection with the main converter unit, as shown in Fig. 10. The PI control unit activates the triggering of the IGBT in APF at a certain firing angle. The compensatory current from the filter interferes with to non-linear load current. If any error signal sustains at comparator of two current nodes junction, it reverts to control unit to readjust firing angle and hence filter activation.

APF with PI at non-linear load model
Repetitive iterations produce the voltage and current relationship as shown in Figs. 11 and 12. The compensation helps in the improvement of the quality of power by reduction of THD. Figure 13 shows the significant contribution of shunt active power filter with PI control to obtain 11.73% THD from 92%.

APF with PI controller line current for nonlinear load

APF with PI controller supply voltage for nonlinear load

APF with PI controller THD for nonlinear load
4.4 Case 4: Non-linear load model with shunt APF and fuzzy controller
The previous control model contributed to the significant improvement in power quality but it still needs to manage the standards. Therefore, the Fuzzy controller replaces the PI control unit in the auxiliary APF converter as shown in Fig. 14.

APF with FLC non-linear load model
Here, fuzzy control seems much effective as compared to PI with membership function 1 > μA > 0. Figures 15 and 16 shows the refined v–i relationships and FFT analysis by Fig. 17. The three time-variant analysis proves the fuzzy control as a better option for power quality improvement and it reduces the THD to 2.13%. A trade-off is maintained between system complexities and virtues of quality parameters.

APF with FLC, line current for the model with nonlinear load

APF with FLC, line voltage for the model with nonlinear load

APF with FLC, THD for the model with nonlinear load
4.5 Case 5: Non-linear load model with hybrid shunt APF and PID controller
In the sequence of consecutive amendment in the filter design, the PID controller replaces the two previous controllers as shown in Fig. 18. By the virtue of effective transient response on stability and peak overshoots of PID control unit, the IGBT firing control becomes much commendable.

APF with PID, non-linear load model
Eventually, Figs. 19 and 20 shows stable in-phase current–voltage time-variant relationship. While Fig. 21 declares a remarkable reduction in total harmonic distortion to the level of 0.49%. The proposed design strategy stands unique in its class with minimum THD and maximum power factor. Thus, implementation of the proposed filter in electrical systems supports the elimination of a wide range of THD, waveform conditioning, power factor correction, system reliability improvement and fault tolerance.

APF with PID, line current for the model with nonlinear load

APF with PID, supply voltage for the model with nonlinear load

APF with PID, FFT analysis of line current with nonlinear load
Summary of different modules explains the generation of power-quality degradation issue on extensive use of solid-state components. Liner load model and non-linear load models are compared to analyse the severity of the issue. The control strategy is applied through transformer-less SAPF filter incorporation with PI, Fuzzy and PID controller. The successive iterations lead to implementations of PI, Fuzzy and PID controller for efficient and reliable design evolution. Table 3 shows the comparative analysis of alliteration of control actions on non-linear load for the design validation of the proposed models.
Based on Table 2, the analytical graph is drawn to the rise of harmonic distortion and depreciation in system reliability as shown in Fig. 22. The comparative study of three controllers reveals that the PI controller significantly reduces the THD from 92.3 to 11.73%. This justifies its utility for a less sensitive commercial load system with low complexities. But, in the case of highly sensitive instruments with load uncertainty, the FLC proved to be a better choice. As far as minimization of THD is a prime concern, then PID shows better applicability under fixed load parameters. In favour of the real-world application, the design validation is proposed in Table 4. The proposed system is compared with the existing active current compensation techniques and appeared more appropriate for implementation. As compared to various standard literature, the proposed transformerless shunt APF with PID controller is proved much effective and applicable to conversion units of non-linear load applications.

Performance and reliability measure
5 Conclusion
Power quality control is a key research interest for the majority of researchers. This is classified based on the category of acting devices and the application domain. The IEEE 519 standard allows devices with a maximum of 5% THD but many sensitive devices like IoT, smart power grid, and precise sensor-based may deviate from performance characteristics with this threshold. Therefore, effective THD minimization with nonlinear load application parameters was achieved in this proposed work. This work elicited the three controller action, their comparisons, and conclusive reduction of THD on the nonlinear load model. However, a comparative validation is presented to validate the proposed model. The proposed PID controlled scheme provides a minimum THD 0.49% on nonlinear load application and justifies novelty in its class of application. Additionally, for real-time load parameter variations, training data sets may be recorded and a machine learning (ML) based algorithm can be implemented to enhance system versatility. The effective utility of fuzzy control action seems more appropriate under uncertainty of load variation and this can lead to smart action through machine learning.
Abbreviations
- APF:
-
Active power filter
- ANN:
-
Artificial neural network
- DSTATCOM:
-
Distribution static compensator
- SLC:
-
Synchronous link converter
- IGBT:
-
Insulated gate bipolar junction transistor
- PWM:
-
Pulse width modulator
- PFC:
-
Power factor correction
- SMPS:
-
Switch mode power supply
- PCC:
-
Point of common coupling
- RES:
-
Renewable energy source
- THD:
-
Total harmonic distortion
- UPQC:
-
Unified power quality control
- VSI:
-
Voltage source inverter
- FLC:
-
Fuzzy logic controller
- RMS:
-
Root mean square
References
Arya SR, Niwas R, Bhalla KK, Singh B, Chandra A, Al-Haddad K (2015) Power quality improvement in isolated distributed power generating system using DSTATCOM. IEEE Trans Ind Appl 51(6):4766–4774
Balamurugan R, Nithya R (2015) FC/PV Fed SAF with fuzzy logic control for power quality enhancement. Int J Power Electron Drive Syst IJPEDS 5(4):470–476
Bhende CN, Mishra S (2006) TS-fuzzy controlled active power filter for load compensation. IEEE Trans Power Deliv 21(3):1459–1465
Blair SM, Booth CD, Williamson G, Poralis A, Turnham V (2017) Automatically detecting and correcting errors in power quality monitoring data. IEEE Trans Power Deliv 32(2):1005–1013
Bonaldo JP, Paredes HKM, Pomilio JA (2016) Control of single-phase power converters connected to low-voltage distorted power systems with variable compensation objectives. IEEE Trans Power Electron 31(3):2039–2052
Busarello TDC, Pomilio JA, Simões MG (2016) Passive filter aided by shunt compensators based on the conservative power theory. IEEE Trans Ind Appl 52(4):3340–3347
Goswami PK (2020) Power quality improvement at nonlinear loads using transformer-less shunt APF with ANFIS supervised PID controllers. Int Trans Electr Energy Syst. https://doi.org/10.1002/2050-7038
Goswami G, Goswami PK (2021a) Self-adaptive learning based controller to mitigate PQ issues in internet of things devices. Int Trans Electr Energy Syst 2021:e12888. https://doi.org/10.1002/2050-7038
Goswami G, Goswami PK (2021b) ANFIS supervised PID controlled SAPF for harmonic current compensation at nonlinear loads. IETE J Res. https://doi.org/10.1080/03772063.2020.1770134
He XJ, Li YW (2014) Active harmonic filtering using current-controlled power control. IEEE Trans Power Electron 29(2):642–653
Hu S, Li Y, Xie B, Chen M, Zhang Z, Luo L, Cao Y, Kubis A, Rehtanz C (2015) A Y-D multi-function balance transformer based power quality control system for single-phase power supply system. IEEE Trans Ind Appl 52(2):1270–1279
Javadi A, Hamadi A, Ndtoungou A, Al-Haddad K (2016) Power quality enhancement of smart households using a multilevel-THSeAF with a PR controller. IEEE Trans Smart Grid 8(99):465–474
Jayasankar VN, Vinatha U (2018) Advanced control approach for shunt active power filter interfacing wind-solar hybrid renewable system to distribution grid. J Electr Syst 14(2):88–102
Kanjiya P, Khadkikar V, Zeineldin HH (2013) A non-iterative optimized algorithm for shunt active power filter under distorted and unbalanced supply voltages. IEEE Trans Ind Electron 60(12):5376–5390
Karuppanan P, Mahapatra K (2011) PI, PID and fuzzy logic controlled cascaded voltage source inverter based active filter for power line conditioners. WSEAS Trans Power Syst 6(4):100–109
Kumar SVSPC, Kumar RD (2016) Power quality improvement of grid integrated type I wind turbine generation system operating as DSTATCOM by d-q control method. J Electr Syst 12–2(2016):278–290
Lahlou Z, Meziane KB, Boumhidi I (2019) Sliding mode controller based on type-2 fuzzy logic PID for a variable speed wind turbine. Int J Syst Assur Eng Manag. https://doi.org/10.1007/s13198-019-00767-z
Medouce HE, Benalla H (2017) Predictive model approach based direct power control for power quality conditioning. Int J Syst Assur Eng Manag. https://doi.org/10.1007/s13198-017-0679-4
Modesto R, da Silva S, de Oliveira A, Bacon V (2015) Versatile unified power quality conditioner applied to a three-phase four-wire distribution systems using a dual control strategy. IEEE Trans Power Electron 89:1–12
Nikum K, Saxena R, Wagh A (2016) Effect on power quality by large penetration of household non linear load. In: IEEE International conference on power electronics, intelligent control and energy systems
Prakash C, Suparna N (2012) Design and simulation of phase-locked loop controller based unified power quality conditioner using nonlinear loads. Int J Power Electron Drive Syst IJPEDS 2(4):417–423
Rao KR, Srikanth KS (2014) Improvement of power quality using fuzzy logic controller in grid-connected photovoltaic cell using UPQC. Int J Power Electron Drive Syst IJPEDS 5(1):101–111
Sinha G, Goswami PK, Sharma SK (2018) A comparative strategy using PI & fuzzy controller for optimization of power quality control. Indones J Electr Eng Inform 6(1):118–124, ISSN 2089-3272
Sinha G, Goswami PK, Sharma SK (2018b) Transformer less SLC for harmonic reduction in non-linear load applications. J Electr Syst 14(3):87–98
Suresh N, Babu RSR (2017) Reduction of total harmonic distortion in cascaded H-bridge inverter by pattern search technique. Int J Electr Comput Eng IJECE 7(6):3292–3298
Teke A, Saribulut L, Tümay M (2011) A novel reference signal generation method for power-quality improvement of unified power-quality conditioner. IEEE Trans Power Deliv 26(4):2205–2214
Varschavsky A, Dixon J, Rotella M, Moran L (2009) Cascaded nine-level inverter for hybrid series active power filter, using industrial controller. IEEE Trans Ind Electron 57(8):2761–2767
Vijayakumar M, Vijayan S (2013) A comparative study and implementation of controller for UPQC in single-phase to three-phase system. Int J Eng Technol 5(5):3846–3857
Zeng Z, Yang JQ, Chen SL, Huang J (2014) Fast-transient repetitive control strategy for a three-phase LCL filter-based shunt active power filter. J Power Electron 14(2):392–401
Funding
This work is not supported by any funding agency.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Goswami, G., Goswami, P.K. A design analysis and implementation of PI, PID and fuzzy supervised shunt APF at nonlinear load application to improve power quality and system reliability. Int J Syst Assur Eng Manag 12, 1247–1261 (2021). https://doi.org/10.1007/s13198-021-01179-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-021-01179-8