
Abstract
The Goal-Oriented (GO) methodology is a success-oriented method for system reliability analysis. However, it is not suitable to evaluate the reliability of uncertain system caused by the insufficient or fluctuated data, model uncertainty, new components, and other external factors. In our study, with the combination of fuzzy set theory and the GO model, the triangular fuzzy number and the extended principle are introduced to quantify the fuzzy uncertainties of input and output state probability respectively. Hence, a new reliability analysis method of fuzzy GO methodology for the uncertain system is proposed. It serves to obtain the membership function of the intuitionistic fuzzy state probability and the fuzzy confidence interval by using the parameter programming for system reliability analysis. As a typical small sample complex electromechanical system, the reliability analysis of electro-hydrostatic actuator (EHA) has the characteristic of fuzzy uncertainty. Using EHA as the research object, the reliability analysis is conducted by the GO methodology, the fuzzy FTA method, and the fuzzy GO methodology respectively. The comparison results of the three methodologies show that the fuzzy GO methodology is an effective and a promising method, which is a reasonable and meaningful extension of the GO methodology. It can be used as a new reliability analysis method for the complex uncertain multi-state systems.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The modern engineering systems develop rapidly and become more complicate. It is necessary and significant to provide accurate reliability analysis for the modern engineering systems. The reliability analysis for the complex systems inevitably involves many uncertainties which are a fundamental attribute of complex systems and caused by the following reasons:
-
1.
Due to the various uncertain factors such as environment temperature, humidity, and so on, the reliability behaviour of components and systems becomes ambiguous and uncertain. For example, the fault mechanism and the failure mode are complex and changeable in a changing environment, and the impact of components and subsystems on system reliability is uncertain.
-
2.
Sometimes, obtaining accurate reliability data and information is very time-consuming, costly and even impossible, especially for complex systems. The reliability evaluation of component or system can only be expressed in words like “the longevity of the system is estimated to 10 years”, which is imprecise and imperfect. Therefore, the crisp values are not ideal to represent an event probability and performance rates of components.
-
3.
The performances and states of components and systems deteriorate with continuous use and natural attrition (Liu and Huang 2011). Therefore, event probability will change or fluctuate over time.
From the above discussion, the reliability analysis for the modern engineering systems inevitably involves many uncertainties which have a great influence on providing an accurate reliability analysis. Furthermore, the quantification of uncertainties in reliable analysis is crucial for accurate and effective decision-making. The conventional assessment methods of reliability assume event probabilities as crisp values and do not take the uncertainty of the system into account, which fails to accurately analyse the reliability of components and systems and reduces the credibility of the system reliability analysis.
Fuzzy set theory is one of the most active uncertain system theories, which is a new methodology and useful tool to deal with the ambiguity or uncertainty in the reliability assessment (Cheng and Mon 1993). Many research results have been achieved by introducing the fuzzy set theory into the reliability analysis methods. Combining the fuzzy set theory with fault tree analysis (FTA), a fuzzy FTA methodology was proposed by Mentes and Helvacioglu (2011), and applied in the spread mooring system under fuzzy environment. Kabir et al. (2016) proposed a method which used the trapezoidal fuzzy number to represent fuzzy failure probabilities of components, and performed quantitative analysis of reliability for ambiguous and uncertain systems. In order to quantify and rank contributions of basic event in criticality analysis, Purba et al. (2017) proposed a-cut method based importance measure to enhance the ability of the fuzzy probability–based fault tree analysis. Applying trapezoidal fuzzy numbers, α-cut set, fault-tree, and the weakest-t-norm, a new FTA method was proposed by Komal (2015) and served to analyse the faults in the healthcare system in which the available data are insufficient and imprecise. Abdelgawad and Fayek (2011) used the fuzzy arithmetic operations to perform quantitative fault-tree analysis, which yielded a more realistic and practical approach to avoid the uncertainty in reliability analysis. A method of intuitionistic fuzzy fault-tree analysis was introduced by Kumar and Yadav (2012) and obtained fault interval and reliability interval of the system. Integrating fuzzy set theory with Bayesian network, a novel reliability analysis method for multi-state system, considering the fuzziness, variety, and uncertainty of component failure probability, was proposed by He et al. (2017). And its effectiveness and feasibility were demonstrated by the flexible lifting system of a high-speed elevator. Using the interval value triangular fuzzy number in the fuzzy theory to describe the component probability, and using the β factor parameter to quantify the common cause failure, reliability analysis method for complex multi-state systems based on Bayesian networks was proposed (Mi et al. 2018). And the resulting method was used on the transmission system of two-axis positioning mechanism of satellite antenna with common cause failure. Reliability modelling and analytical method based on continuous time Bayesian Networks under fuzzy data is presented in Wang et al. (2015) by introduced the fuzzy set theory to Bayesian networks. The resulting method considered the fuzzy uncertainty of failure behaviour and failure data of systems and components, and was applied on rectifier feedback system to verify its feasibility. With the trapezoidal fuzzy numbers to represent the fuzzy failure rates and fuzzy repair rates, fuzzy Markov model was built by Kumar and Lata (2012) based on Markov models. And the fuzzy Markov model was applied on condensate system. Mechri et al. (2013) proposed fuzzy multiphase Markov chains to handle imprecise and uncertain problems in analyzing performance of safety instrumented systems by using fuzzy numbers to describe the uncertainty on the probability of components failure. From the research findings above, it is concluded that fuzzy set theory is a new mathematical tool for analysing the uncertainty and imprecise problems. It can deal with the uncertain fuzzy information effectively and make the reliability evaluation of complex system more realistic and credible.
GO (Goal-Oriented) methodology is a success-oriented method for system reliability analysis (Shen et al. 2001, 2003; Yi et al. 2014). It is particularly propitious to analyse the reliability analysis of complex systems with actual logistics such as current, airflow, flow and so on (Du et al. 2011; Yi et al.2016; Zhou et al. 2015). Furthermore, compared with traditional reliability analysis methods such as FTA, Bayesian network, Markov model, GO methodology has several clear advantages as follows:
-
1.
The GO chart is established on the basis of the systems principle chart or engineering chart so that it can better reflect the actual operation of the system given several unique features such as low human factors, higher consistency and so on.
-
2.
The GO methodology not only qualitatively analyses the reliability of complex systems, but also quantifies the reliability of complex systems accurately.
-
3.
The GO chart not only has many types of operators that can simulate the state of components, but also has many signals that represent connection among the components, which makes GO chart more compact for system simulation and easy to check, transform and modify. Besides, GO operator and signal flows can represent multistate states of the component, which makes the GO methodology have the ability to analyze the reliability of multistate systems.
So far, the GO methodology has been widely applied in the reliability and safety analysis, and achieved good results. Zhang et al. (2018) performed the qualitative and quantitative analysis of the aero-engine main fuel system reliability by using the GO methodology. Guo et al. (2016) established GO chart of continuous electrodeionization water treatment systems, and analyzed the system reliability and component importance. Combining the state combination algorithm and state cumulative probability algorithm, a novel evaluation method for system reliability analysis was proposed by Jiang and Duan (2014) based on the GO methodology, and its feasibility and effectiveness were verified by the two examples. Based on GO methodology, a new reliability analysis method for repairable systems with multifunction modes was presented in Yi et al. (2017). Its feasibility, advantage, and reasonableness were verified by the control system of heavy vehicles. As for uncertain system, based on triangle fuzzy number and traditional GO operator, the fuzzy GO operation was deduced in Yin and Mu (2008)and applied on a simplified monitoring circuit of some avionic device to demonstrate its precision and effectiveness. The uncertainties of failure rate were considered as fuzzy possibilities and expressed as fuzzy numbers, and reliability analysis of GO method multi-temporal based on fuzzy theory was proposed in Zhang et al. (2010), and the resulting method was applied on the tool changing system. Jiang et al. (2015) used the triangular fuzzy number to describe the normal state probability of each component and made the reliability analysis of CNC machine hydraulic system. To sum up, although certain research results have been achieved based on GO methodology, such as using the precision value for reasoning analysis, the introduction of fuzzy technology for uncertainty analysis, there are still shortcomings in the existing reliability analysis methods by using GO methodology for complex uncertain multi-state systems. The main problems are as follows:
-
1.
The GO operators are not make full use of, and the resulting models are not suitable for evaluating the reliability of multi-state components and systems, such as Yin and Mu (2008), Zhang et al. (2010), Jiang et al. (2015) and so on.
-
2.
It only expresses success probability (i.e. Jiang et al. 2015) or failure probability (i.e. Yin and Mu 2008, Zhang et al. 2010) of the event as a fuzzy number and do not express the success probability, the failure rate, the early probability thoroughly as fuzzy numbers, which makes the resulting model ill-considered and reduces the accuracy and credibility of reliability assessment results.
In order to solve the above problems and provide accurate reliability assessment results for complex uncertain system when the state probability of an event is uncertain due to the lack of insufficient or fluctuated data, model uncertainty, new components, and other external factors, with the combination of fuzzy set theory and the GO model, a new reliability analysis method-fuzzy GO methodology for the uncertain system is proposed. And the highlights of contributions of the study are as follows: (1) Triangular fuzzy number is used to represent and quantify the uncertainty of the state probability (i.e. the premature state probability, the success state probability, and the failure state probability) of components, which can effectively represent the state probability of uncertainty caused by the lack of sufficient data, model uncertainty, new components, and other external factors; (2) Based on the extended principle, the output state probability of the system is defined as a new fuzzy number, and using the GO model, the intuitionistic fuzzy state probability membership function of the system is obtained by using the parameter programming, which makes the reliability of the system analysed accurately and enhances the credibility of the system reliability analysis. (3) The confidence fuzzy intervals of the system reliability analysis at different cut set levels can be obtained, which makes the reliability analysis and evaluation of the system more intuitive and clear.
This paper is organized as follows: in Sect. 2, the fuzzy algorithm of data is introduced, which includes triangular fuzzy number and α-cuts, triangular fuzzy number transformation method of data, and extension principle. Reliability analysis principle of the fuzzy GO methodology is introduced in Sect. 3 in which the flow chart and its specific processes interpretation are given. In Sect. 4, reliability evaluation of electro-hydrostatic actuator (EHA) is carried out to demonstrate the effectiveness and feasibility of the fuzzy GO methodology. In Sect. 5, conclusions are drawn.
2 The fuzzy algorithm of data
2.1 Triangular fuzzy number and α-cuts
Let U be a universal set, with each element denoted by x. A fuzzy set \( \tilde{X} \) of U is defined by a membership function: \( \mu_{{\tilde{X}}} (x) \): U→[0,1]. The function value of \( \mu_{{\tilde{X}}} (x) \) is a real number in interval [0,1] and represents the grade of membership of x belonging to X. And the larger value of \( \mu_{{\tilde{X}}} (x) \), the higher the grade of membership of x belonging to \( \tilde{X} \).
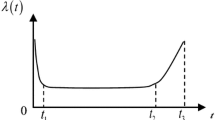
A fuzzy set \( \tilde{X} \) is defined as a fuzzy number which is a normal and convex set. Triangular fuzzy number is one of the most common fuzzy numbers and has the advantages of straightforward calculation and intuitive expression in mathematical calculation. It is widely used to solve the fuzzy uncertainty problem in the reliability engineering (Ding et al. 2008; Liu and Huang 2010; Li et al 2012). A triangular fuzzy number, defined by the triplet (l, m, h), is formulated as:
and its graphic figure is shown in Fig. 1.

Membership function of triangular fuzzy number
The parameters l, m, h in Fig. 1 are lower bound, median value, and upper bound in triangular fuzzy number respectively, which represent the minimum possible value, the most possible value, and the maximum possible value when using a fuzzy variable x to describe a fuzzy state probability. According to Fig. 1, when x < l and h > l, \( \mu_{{\tilde{X}}} (x) = 0 \); when l ≤ x ≤ h, \( \mu_{{\tilde{X}}} (x) \) ∈[0,1].
α-cuts is one vital and widely applied concept and plays a significant role in the field of reliability. If an element x belonging to a fuzzy set \( \tilde{X} \) is showed, it may be required that its membership value should be larger than some threshold α ∈[0,1]. The α-cuts \( \tilde{X}_{\alpha } \) of \( \tilde{X} \) can be denoted by \( \tilde{X}_{\alpha } = \left\{ {x \in \tilde{X}|\mu_{{\tilde{X}}} (x) \ge \alpha } \right\} \). The interval of this set can be written as \( \tilde{X}_{\alpha } = \left[ {\tilde{X}^{L}_{\alpha } ,\tilde{X}^{U}_{\alpha } } \right] \). \( \tilde{X}^{L}_{\alpha } \) and \( \tilde{X}^{U}_{\alpha } \) are lower and upper bound of the fuzzy sets \( \tilde{X}_{\alpha } \).
2.2 Triangular fuzzy number transformation method of data
The state probability of component in the GO methodology is generally obtained from the historical statistics data which are the crisp value. In order to describe the fuzzy uncertainty of component, the crisp value of the state probability of component is transformed into a triangular fuzzy number which is constructed as (l, m, h):
In above formula, p is the crisp value of the state probability, and Ef is the error factor which can be selected according to the actual working condition of the system, experts’ knowledge and experience.
2.3 Extension principle
The extension principle, introduced by Zadeh (1978), is an important tool for fuzzy mathematical analysis and provides a theoretical basis for solving fuzzy uncertainties (Li et al. 2012). In our study, the analytic operation of fuzzy number is carried out with triangular fuzzy numbers. Given xi (i = 1,2,…,n) is an input variable corresponding to the input fuzzy numbers \( \tilde{X}_{i} \)(i = 1, 2, …n), the membership function of xi (i = 1,2,…,n) and \( \tilde{X}_{i} \)(i = 1, 2, …n) is \( \mu_{{\tilde{X}_{i} }} (x_{i} ) \). Ri (i = 1, 2, …, n) represents the universal sets of real numbers. f(x1,…,xn) as a function maps the inputs variable xi∈Ri (i = 1, 2, …, n) to an output variable y. Thus, a fuzzy number \( \tilde{Y}\) is generated from fuzzy numbers \( \tilde{X}_{i} \)(i = 1, 2, …n) with function f(x1, …, xn). With the extension principle, the membership function of the fuzzy number \( \tilde{Y}\) can be defined as:
By using the extension principle, the interval of α-cut of the fuzzy number \( \tilde{Y}\) can be obtained by:
Therefore, a pair of parametric programming can be applied to obtain the interval of the fuzzy number \( \tilde{\hbox{Y}}\) at the α-cut level:
With the commercial optimization software such as Matlab, Isight, and so on, the parametric programming can be solved, and it can easily obtain a couple of the intervals subjected to different α-cut levels.
3 Reliability analysis principle of the fuzzy GO methodology
GO methodology is a success-oriented graphical technology for system reliability analysis. With the combination of fuzzy set theory and the GO model, the triangular fuzzy number and the extended principle are introduced to quantify the fuzzy uncertainties of input and output state probability respectively. A new reliability analysis method of fuzzy GO methodology for the uncertain system is proposed. Reliability analysis principle of the fuzzy GO methodology is shown in Fig. 2, and the specific steps are as follows:

Reliability analysis principle of the fuzzy GO methodology
Step 1 The basic principles of the system are analysed, meanwhile, the logical structure of the components and subsystems should be made clear.
Step 2 The operator types of the corresponding components are determined on the basis of the components function and the logical relationship between the input and output signals of components.
Step 3 According to the logical process of the system logistics, the GO chart is generated through the connection of the operators where the signal flows is used.
Step 4 Starting from the input operator, following the operation rules of each operator and the signal flows, the output state probability expressions of the system are obtained.
Step 5 Using the processing method of formula (2), the crisp values of the state probability of the components are transformed into triangular fuzzy number (l, m, h), and the fuzzy state probability of each state (i.e.premature state, success state, and failure state) of the components is obtained.
Step 6 (1) The output state probability of the system is denoted as a new fuzzy number by using the extended principle; (2) the triangular fuzzy number obtained by step 5 is the input variable of the extension principle; (3) and the state probability expression generated by step 4 is used as the mapping function of the extended principle. Thus, the intuitionistic fuzzy state probability membership function of the system is obtained by using the parameter programming that can be solved with the commercial optimization software (such as Matlab, Isight, and so on). It can be accurate, intuitive and clear for decision-marker to make the reliability analysis and evaluation of the system.
4 Case study: reliability evaluation of EHA
Electro-hydrostatic actuator (EHA) is a key subsystem of aircraft handling and control system. Its safety and reliability are of great significance to ensure flight safety. Many serious accidents of the aircrafts have occurred caused by EHA failure at home and abroad. Meantime, the great demand for the reliability of EHA in the new generation of aircraft is increasing. The reliability study of EHA is of great significance for reducing aircraft accidents and improving the performance and safety of the aircraft.
4.1 System principle and uncertainty analysis
Compared with other types of actuators, EHA has the complex structure and mainly includes the following components: (1) DC motor; (2) EHA digital controller; (3) bidirectional pump; (4) pressure, position and speed sensors; (5) accumulator; (6) bidirectional pump; (7) actuation cylinder and so on. The structural schematic diagram of EHA is shown in Fig. 3.

The structural schematic diagram of EHA
When EHA system works, its digital controller and power driver accept the command of host computer to drive the DC motor. In order to control the actuation cylinder accurately, the DC motor drives bidirectional pump with high-speed rotary motion, and then controls the flow of high pressure oil from the output of pump to actuation cylinder through the way of volume speed-modulating. The accumulator is pressurized by the one-way valve for the system to maintain the minimum pressure and prevent cavitation from occurring in the hydraulic oil. The filter is used to filter the impurities in the hydraulic oil to ensure normal operation of the hydraulic pipeline and other equipments. The speed sensor, the pressure sensor, and the position sensor feed back the relevant parameters to the EHA digital controller to form a closed loop for real-time control and monitor of the system.
EHA, belonging to the typical small sample complex electromechanical system, has characteristic of uncertainty. Figure 4 describes the sources of uncertainty in the EHA design and its use process. They mainly contain input uncertainty and model uncertainty.

The resource of uncertainty in EHA system
Input uncertainty is caused by changes in external conditions and physical systems, and mainly includes input data uncertainty, internal parameter uncertainty and environmental uncertainty. Limited test samples and insufficient reliability data will lead to the input data uncertainty. Internal parameter uncertainty is mainly caused by the changes in the internal working environment of the system. Environmental uncertainty is caused by the real-time changes in environmental and external working conditions, such as changes in temperature, humidity and so on.
Model uncertainty is mainly caused by the lack of information, the means of cognition, the approximate processing, the model simplification and so on. They mainly exist in the process of modeling and simulation of the system.
In this paper, input uncertainty and model uncertainty are seen as the uncertainty of the EHA components, which is caused by the insufficient or fluctuated data, model uncertainty, new components, and other external factors.
4.2 Reliability evaluation of EHA based on the fuzzy GO methodology
4.2.1 GO chart establishment
According to the characteristics of the component and the logical relationship among the components, the operators can be selected. The GO chart is established as shown in Fig. 5, in the light of selected operators and work principle of EHA. The input of the EHA consists of the power source, pressure sensor, position sensor, speed sensor, and command, which can be simulated by Type 5 operators in Fig. 5. The EHA digital controller, power driver, one-way valves, bidirectional pump, accumulator, filters, safety valves, hydraulic pipeline, and actuation cylinder are assumed as two states. They can be represented by Type 1 operators. Due to thermal shock, electromagnetic radiation and other inappropriate actions or unexpected external stimuli, the DC motor may produce early output. Therefore, Type 3 operator is chosen. Besides, if the power source, pressure sensor, command, position sensor, and speed sensor are in the successful operation state, they can send an effective signal to the digital controller. This logical relationship can be simulated by Type 10 operator (AND gate). Similarly, Type 10 operator can simulate the output logical relationship of filter 1, safety valve 1, filter 2, and safety valve 2. In Fig. 5, the former number in the operator represents the type of the operator, and the latter number in the operator represents the number of the operator, and the number on the signal flows represents the number of the signal flows. There are 21 operators and 21 signal flows in the GO chart. The 19 signal flow is the signal flow of the system, and its reliability characteristic quantity represents the reliability characteristics of the EHA.

GO chart of EHA
According to the Zhao et al. (2014) and formula (2), fuzzy state probability of each component is obtained. The operator types and fuzzy state probability of each component are shown in Table 1. The state probability of component is denoted as pcj(i) (i = 0, 1, 2) satisfying \( \sum\nolimits_{i = 0}^{2} {p_{cj} (i)} = 1 \), where 0, 1, and 2 denote the premature state, the state success, the failure state respectively.
4.2.2 Fuzzy GO operation
If a signal connecting to two or more operators is regarded as the input signal, it will be defined as a shared signal. Obviously, the signal 11 belongs to the shared signal in Fig. 5. Since the shared signal is not completely independent, the state probability of output needs to be modified. When the probability formula is used to calculate the state probability expression including shared signal, the higher-order term of the shared signal will need to be modified as the first-order term in the GO methodology. The modified expression of state probability represents the correct state probability. By analyzing the GO chart, signal flow 20, signal flow 8, signal flow 10, signal flow 21 and signal flow 19 are key output signal flows. Among them, signal flow 19 is output signal flows of the entire EHA system and represents the reliability characteristics of the EHA system. The modified expressions of state probability of key output signal flows are as follows:
-
1.
Signal flow 20
$$ \begin{aligned} A_{r20} (0) & = \prod\limits_{j = 1}^{5} {A_{s20} (0) = 0} \\ A_{r20} (1) & = \prod\limits_{j = 1}^{5} {A_{s20} (1)} = \prod\limits_{j = 1}^{5} {p_{cj} (1)} \\ p_{r20} (0) & = A_{r20} (0) = 0 \\ p_{r20} (1) & = A_{r20} (1) - A_{r20} (0) = \prod\limits_{j = 1}^{5} {p_{cj} (1)} \\ \end{aligned} $$(6) -
2.
Signal flow 8
$$ \begin{aligned} p_{r8} (0) & = p_{c8} (0) + p_{s8} (0) \cdot p_{c8} (1) = p_{c8} (0) \\ p_{r8} (1) & = p_{s8} (1) \cdot p_{c8} (1) = \prod\limits_{j = 1}^{8} {p_{cj} (1)} \\ A_{r8} (0) & = p_{c8} (0) + A_{s8} (0) \cdot p_{c8} (1) = p_{c8} (0) \\ A_{r8} (0) & = p_{c8} (0) + A_{s8} (1) \cdot p_{c8} (1) \\ & = p_{c8} (0) + \prod\limits_{j = 1}^{8} {p_{cj} (1)} \\ \end{aligned} $$(7) -
3.
Signal flow 10
$$ \begin{aligned} p_{r10} (0) & = p_{s10} (0) \cdot p_{c10} (1) = p_{c8} (0) \cdot \prod\limits_{j = 9}^{10} {p_{cj} (1)} \\ p_{r10} (1) & = p_{s10} (1) \cdot p_{c10} (1) = \prod\limits_{j = 1}^{10} {p_{cj} (1)} \\ A_{r10} (0) & = A_{s10} (0) \cdot p_{c10} (1) = p_{c8} (0) \cdot \prod\limits_{j = 9}^{10} {p_{cj} (1)} \\ A_{r10} (1) & = A_{s10} (1) \cdot p_{c10} (1) \\ & = p_{c8} (0) \cdot \prod\limits_{j = 9}^{10} {p_{cj} (1)} + \prod\limits_{j = 1}^{10} {p_{cj} (1)} \\ \end{aligned} $$(8) -
4.
Signal flow 21
$$ \begin{aligned} A_{r21} (0) & = A_{s10} (0) \cdot \prod\limits_{j = 13}^{14} {A_{sj} (0)} \cdot \prod\limits_{j = 16}^{17} {A_{sj} (0)} = 0 \\ A_{r21} (1) & = A_{s10} (1) \cdot \prod\limits_{j = 13}^{14} {A_{sj} (1)} \cdot \prod\limits_{j = 16}^{17} {{{A_{sj} (1)} \mathord{\left/ {\vphantom {{A_{sj} (1)} {A^{3}_{s11} }}} \right. \kern-0pt} {A^{3}_{s11} }}(1)} \\ & = p_{C8} (0) \cdot \prod\limits_{j = 9}^{17} {p_{cj} (1)} + \prod\limits_{j = 1}^{17} {p_{cj} (1)} \\ p_{r21} (0) & = A_{r21} (0) = 0 \\ p_{r21} (1) & = A_{r21} (1) - A_{r21} (0) \\ & = p_{C8} (0) \cdot \prod\limits_{j = 9}^{17} {p_{cj} (1)} + \prod\limits_{j = 1}^{17} {p_{cj} (1)} \\ \end{aligned} $$(9) -
5.
Signal flow 19
$$ \begin{aligned} p_{r19} (0) & = p_{s19} (0) \cdot p_{c19} (1) = 0 \\ p_{r19} (1) & = p_{s19} (1) \cdot p_{c19} (1) \\ & = \left( {p_{c8} (0) + \prod\limits_{j = 1}^{8} {p_{cj} (1)} } \right) \cdot \prod\limits_{j = 9}^{19} {p_{cj} } (1) \\ p_{r19} (2) & = 1 - p_{r19} (0) - p_{r19} (1) \\ A_{r19} (0) & = A_{s19} (0) \cdot p_{c19} (1) = 0 \\ A_{r19} (1) & = A_{s19} (1) \cdot p_{c19} (1) \\ & = \left( {p_{c8} (0) + \prod\limits_{j = 1}^{8} {p_{cj} (1)} } \right) \cdot \prod\limits_{j = 9}^{19} {p_{cj} } (1) \\ \end{aligned} $$(10)
In the above formulas: psj(i) represents the probability of the jth signal in the input state i. prj(i) represents the probability of the jth signal in the output state i. Asj(i) represents the cumulative state probability of the jth input signal states from 0 to i. Arj(i) represents the cumulative state probability of the jth output signal states from 0 to i.
4.2.3 System reliability evaluation
By analysing the GO chart, it can be seen that signal 19 is output signal of the EHA and represents the reliability characteristics of the EHA. In formula (10), pr19(0) is the expression of the fuzzy state 0 of system output and represents the reliability characteristics of the system in premature state. Obviously, pr19(0) = 0. pr19(1) is the expression of the fuzzy state 1 of the system output and represents the reliability characteristics of the system in success state. pr19(2) is the expression of fuzzy state 2 of the system output and represents the reliability characteristics of the system in failure state. According to the data in Table 1, the probability expressions of the output fuzzy state of the system, and the specific steps of the fuzzy GO methodology in Fig. 2, the intuitionistic fuzzy state probability membership function of the EHA is obtained, as shown in Fig. 6.

Membership function of the fuzzy probability
In order to demonstrate the effectiveness and feasibility of the fuzzy GO methodology, the reliability analysis of EHA is conducted by the GO methodology (Shen et al. 2001) and the fuzzy FTA method (Wang et al. 2013). Due to the limited space, the processes of the GO methodology and the fuzzy FTA method are not elaborated in detail in our paper, and the reliability analysis results are also shown in Fig. 6.
It can be seen from Fig. 6a that all possible values of the output fuzzy success probability of the EHA by the fuzzy GO methodology are in the interval [0.99976044, 0.99979482, 0.99982919] when α = 0.0; in other words, 0.99976044, 0.99979482, and 0.99982919 are the minimum possible value, the most possible value, and the maximum possible value of the fuzzy success probability of the EHA calculated by the fuzzy GO methodology. And according to Fig. 6b, all possible values of the output fuzzy failure probability of the EHA by the fuzzy GO methodology are in the interval [1.7441E−4, 2.0518E−4, 2.3596E−4] when α = 0.0; this means that 1.7441E−4, 2.0518E−4, and 2.3596E−4 are the minimum possible value, the most possible value, and the maximum possible value of the fuzzy failure probability of the EHA calculated by the fuzzy GO methodology.
If the α is considered as confidence level of system reliability, from the knowledge of the cut set theory, the smaller the value of the α will be, the larger the fuzzy interval of the system reliability will be, the larger uncertainty divergence of data in the fuzzy interval will be, the lower credibility of the reliability analysis results will be; the larger value of the α will be, the smaller the fuzzy interval of the system reliability will be, the smaller uncertainty divergence of data in the fuzzy interval will be, the higher credibility of the reliability analysis results will be. In our study, from the point of view of decision-maker preferences, α = 0.5 is chosen to indicate that the system is neutral attitude credible, and the system reliability confidence interval [0.99977763, 0.99979482, 0.99981200] is obtained.
According to Fig. 6, confidence fuzzy intervals of the system reliability index at different cut set levels for three analysis methods are shown in Table 2. The second list in Table 2 gives that the success probability of EHA is 0.99979482. It is obtained by the GO methodology and the same as the result calculated by the fuzzy GO methodology when α = 1.0. It is because when α = 1.0, the success probability of EHA calculated by the fuzzy GO methodology is equal to its results regarding the state probability of all components as crisp probability. The third list in Table 2 shows the fuzzy confidence intervals of the success probability of EHA, calculated by the fuzzy FTA method. The last list in Table 2 shows the fuzzy confidence intervals of the success probability of EHA, calculated by the fuzzy GO methodology.
According to Fig. 6 and Table 2, it can be concluded that:
-
1.
The results calculated by the GO methodology are in the fuzzy confidence interval calculated by the fuzzy GO methodology, which verifies the validity of the proposed method.
-
2.
The results at different cut set levels obtained by the fuzzy FTA method and the fuzzy GO methodology are very close but slightly different, which also verifies the validity of the proposed method. That is becase the basic events in the FTA method only consider two states, namely, success and failure, but the GO methodology also takes the premature state into account. Therefore, compared with the fuzzy FTA method, the proposed method can evaluate the reliability of multi-state system that has premature state, success state, and failure state, which analyses the reliability of the system more accurately.
-
3.
Compared with the GO methodology and the fuzzy FTA method, the fuzzy GO methodology adopts the parametric programming to obtain the membership function of the intuitionistic fuzzy state probability, which is convenient and intuitive for calculation processed by the commercial optimization software (such as Matlab, Isight, and so on) in the computer.
-
4.
In terms of statistics, the fuzzy interval belonging to the membership function has incomparable advantages than the single value or interval, which reflects the authenticity of the results more accurately.
5 Conclusions
A new system reliability analysis method, the fuzzy GO methodology, is proposed. The proposed method integrates the fuzzy set theory and the GO methodology. In this study, the triangular fuzzy numbers are used to describe the state probability of the components, which can effectively represent the state probability of uncertainty caused by the lack of sufficient data, model uncertainty, new components, and other external factors. Based on the extended principle, the output state probability of the system is defined as a new fuzzy number, and using the GO model, the intuitionistic fuzzy state probability membership function of the system is obtained by using the parameter programming, which makes the reliability of the system analysed accurately and enhances the credibility of the system reliability analysis. Furthermore, the confidence fuzzy intervals of the system reliability analysis at different cut set levels also can be obtained, which makes the reliability analysis and evaluation of the system more intuitive and clear.
The feasibility and effectiveness of the proposed method are verified by a case study on the electro-hydrostatic actuator. It is shown that the fuzzy GO methodology is an effective method for reliability analysis of complex uncertain multi-state systems, which hence illustrates its advantages over conventional GO methodology.
In the process of the reliability analysis, there may be some problems need to be solved, such as multiple failure modes, chain failure, common cause failure, and so on. Future work will be focused on extending the proposed method to analyse the reliability of complex uncertainty multi-state system with these problems.
References
Abdelgawad M, Fayek AR (2011) Fuzzy reliability analyzer: quantitative assessment of risk events in the construction industry using fuzzy fault-tree analysis. J Constr Eng Manag 137(4):294–302
Cheng CH, Mon DL (1993) Fuzzy system reliability analysis by interval of confidence. Fuzzy Sets Syst 56(1):29–35
Ding Y, Zuo MJ, Lisnianski A et al (2008) Fuzzy multi-state systems: general definitions, and performance assessment. IEEE Trans Reliab 57(4):589–594
Du HB, Hu JP, Du YL et al (2011) Stated analysis technique of GO methodology for reliability of fire protection systems. Adv Mater Res 183–185:1383–1388
Guo X, Zhao N, Jing CY et al. (2016) Reliability analysis on CEDI water treatment system based on GO methodology. In: 6th international conference on information engineering for mechanics and materials (ICIMM 2016), pp 434–438
He Q, Zha Y, Zhang R et al (2017) Reliability analysis for multi-state system based on triangular fuzzy variety subset Bayesian networks. Eksploatacja i Niezawodnos-Maint Reliab 19(2):152–165
Jiang X, Duan FH (2014) A new quantification algorithm with probability matrix in the GO methodology. J Inf Comput Sci 11(14):5035–5042
Jiang M, Yan J, Li H et al (2015) Reliability analysis of heavy-duty CNC machine hydraulic system based on fuzzy Goal Oriented method. J Donghua Univ ((Eng Ed)) 32(6):901–905
Kabir S, Walker M, Papadopoulos Y et al (2016) Fuzzy temporal fault tree analysis of dynamic systems. Int J Approx Reason 77:20–37
Komal (2015) Fuzzy fault tree analysis for patient safety risk modeling in healthcare under uncertainty. Appl Soft Comput 37:942–951
Kumar A, Lata S (2012) Reliability evaluation of condensate system using fuzzy Markov model. Ann Fuzzy Math Inform 4(2):281–291
Kumar M, Yadav SP (2012) The weakest-norm based intuitionistic fuzzy fault-tree analysis to evaluate system reliability. ISA Trans 51(4):531–538
Li YF, Huang HZ, Liu Y et al (2012) A new fault tree analysis method: fuzzy dynamic fault tree analysis. Eksploatacja i Niezawodnosc-Maint Reliab 14(3):208–214
Liu Y, Huang HZ (2010) Reliability assessment for fuzzy multi-state systems. Int J Syst Sci 41(4):365–379
Liu Y, Huang HZ (2011) Optimal replacement policy for fuzzy multi-state element. J Mult-valued Logic Soft Comput 17(1):69–92
Mechri W, Simon C, Bicking Frédérique et al (2013) Fuzzy multiphase Markov chains to handle uncertainties in safety systems performance assessment. J Loss Prev Process Ind 26(4):594–604
Mentes A, Helvacioglu IH (2011) An application of fuzzy fault tree analysis for spread mooring systems. Ocean Eng 38(2–3):285–294
Mi JH, Li YF, Peng WW et al (2018) Reliability modeling and analysis of complex multi-state system based on interval-valued fuzzy Bayesian network. Sci Sin Phys Mech Astron 48(1):01460401–01460413
Purba JH, Tjahyani DTS, Widodo S et al (2017) α-Cut method based importance measure for criticality analysis in fuzzy probability-based fault tree analysis. Ann Nucl Energy 110:234–243
Shen ZP, Guo J, Huang XR (2001) An exact algorithm dealing with shared signals in the GO methodology. Reliab Eng Syst Saf 73(2):177–181
Shen ZP, Wang Y, Huang XR (2003) A quantification algorithm for a repairable system in the GO methodology. Reliab Eng Syst Saf 80(3):293–298
Wang D, Zhang P, Chen L (2013) Fuzzy fault tree analysis for fire and explosion of crude oil tanks. J Loss Prev Process Ind 26(6):1390–1398
Wang XM, Li YF, Li AF et al (2015) Reliability modeling and evaluation for rectifier feedback system based on continuous time Bayesian Networks under fuzzy numbers. J Mech Eng 51(14):167–174
Yi XJ, Dong HP, Jiang JP et al (2014) Reliability analysis of hydraulic transmission oil supply system of power-shift steering transmission based on GO methodology. J Donghua Uni Engl Ed 31(6):785–788
Yi XJ, Dhillon BS, Shi J et al (2016) Reliability analysis method on repairable system with standby structure based on Goal Oriented methodology. Qual Reliab Eng Int 32(7):2505–2517
Yi XJ, Shi J, Dhillon BS et al (2017) A new reliability analysis method for repairable systems with multifunction modes based on goal-oriented methodology. Qual Reliab Eng Int 33:2215–2237
Yin ZR, Mu XD (2008) Reliability assessment of avionic device based on fuzzy theory and GO methodology. In: IEEE proceedings of intelligent information technology application Shanghai, China, pp 566–570
Zadeh LA (1978) Fuzzy sets as a basis for a theory of possibility. Fuzzy Sets Syst 1(1):3–28
Zhang GB, Xu Z, Wang GQ et al (2010) Reliability analysis of GO method multi-temporal based on fuzzy theory. J Mech Des 27(11):15–18
Zhang S, Ren C, Wan L et al (2018) Reliability analysis of aero-engine main fuel system based on GO methodology. Shanghai Jiao Tong Univ (Science) 23(6):770–775
Zhao JJ, Duan FH, Jin X et al (2014) GO analysis and design method for the reliability of electro -hydrostatic actuator. Mech Sci Technol Aerosp Eng 33(9):1428–1433
Zhou LG, Dong HP, Yi XJ et al (2015) Reliability analysis of retracting actuator with multi-state based on Goal Oriented methodology. J Shanghai Jiaotong Univ (Science) 20(3):307–311
Acknowledgements
The authors express their sincere appreciation to the editor and reviewers for helping to improve this paper. This study is funded by the Aeronautical Science Foundation of China under Grant number 20150863003.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Wang, H., Duan, F. Reliability analysis method of the uncertain system based on fuzzy GO methodology and its application in electro-hydrostatic actuator. Int J Syst Assur Eng Manag 10, 1265–1275 (2019). https://doi.org/10.1007/s13198-019-00874-x
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s13198-019-00874-x