
Abstract
This paper describes the Matlab based simulation of radio frequency interference monitoring and mitigation techniques using adaptive array antenna and null steering algorithm. The proposed research is described to show the design and implementation of the GPS transmitter and receiver system for real time navigation, location based services and last but not least tracking applications. Two interferences arriving at 35° and 55° with power greater than seven times of original GPS signals arriving at 45°. Least mean square (LMS) and recursive least square (RLS) algorithms. The proposed system has been evaluated by conducting experiments by using the simulation tool for AntiJammer. The proposed model is useful for developing the smart health care application. Results showed better performance of RLS over LMS to mitigate the effect of interference as well as noise with a higher signal to noise ratio. This system will be useful for enhancing the communication effectiveness of smarthealth care systems.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Global positioning system (GPS) is an arrangement of few orbiting Geo satellites which give information of their position with exact time in space, on the other hand GPS receiver on earth receives the signals and calculates the position, speed, time of the system at that instance. A GPS system can be explained in three parts; a constellation of between 24 and 32 Solar Powered S Satellites(SPS) revolving around the Earth’s orbit at an altitude of approximately 20,000 km, a major control station and four control and monitoring satellites and a GPS Receiver on a vehicle/device on earth (Sameer and Joel 2003). A correlation operation is performed by the receiver using Delay Lock Loops (DLLs) to correlate GPS signal in form of incoming codesor bits sequence with identical codes generated by the receiver locally. The bit sequences are Gold codes formed as a product of pseudorandom noise sequences (Spilker 1978). By analyzing the received and locally generated bit sequence, the receiver decides the pseudo range of each satellite (Getting 1993). When the analysis is being driven, the receiver clock time is compared to the satellite time of transmission to determine the pseudo range. The time of transmission from the satellite is encoded with bit sequence using the navigation data (Parthasarathy 2006).
The escalated dependency on GPS for navigation, tracking and guidance has created a necessity for commensurate protection against threats such as unintentional and intentional jamming. A number of methods have been explored and of-course are yet to be explored for strong mitigation of high power interference signals. One method to diminish the interference caused by jamming to the GPS signals is the utilization of adaptive array processing (Amin and Zhang 2002; Zhang 2006). In particular, adaptive array processing techniques allow profiteering of the spatial domain for improved jamming suppression and signal protection (Amin et al. 2004; Fante and Vaccaro 2000; Sun and Amin 2005; Zhang and Amin 2001). Blind antijamming array processing techniques, such as minimum variance (MV), achieve excellent jammer-suppression performance (e.g., Spilker 1978; Zhang et al. 2001). GPS coarse acquisition (C/A) codes uses direct sequence spread spectrum with 20 duplicates of 1023-chip pseudo-noise (PN) codes, in order to achieve a processing gain of 43.1 dB. The high processing gain of 43.1 dB enables GPS signals to assume very low power prior to dispreading and, as such, escape suppression or nulling. The adequately high signal level after dispreading gives appropriate identification of signal delays for accurate positioning of GPS receiver. Smart healthcare systems are necessary today for satisfying the patients who are remotely available and connected with the specific hospital around the city, state and country even universal.
The major contribution of the paper are the introduction of the radio frequency interference monitoring and the mitigation techniques using an adaptive array antenna and null steering algorithm for reducing the noise. The rest of this paper is organized as follows: Sect. 2 described the related works in this direction. Section 3 explains the proposed model including the GPS transmitter design. Section 4 demonstrated that the experimental results. Section 5 gives conclusion and future works.
2 Related work
There are a considerable number of papers which deals with anti jamming of GPS receivers (Mousavi et al. 2018). Some papers concentrate on time of reception should be fast and, some compare the RLS and LMS algorithm. A comparative analysis of GPS and GNSS satellite receivers is also one of the topics. Ying (2018) developed a new threshold algorithm which proposes a wavelet packet Transform (WPT) based adaptive predictor to cancel the jamming signals for global positioning system receivers. The adaptive threshold selection algorithm deals in both time and WPT domains. An anti-jamming Vector Tracking (VTR) Receiver also called Vector Lock Loop (VLL) which improves its anti-jamming performance of the tracking loop. The VLL takes the advantage of combining the navigation filter with a tracking loop in Kalman filters (Li et al 2016). Results show an improvement in ability of anti-jamming receiver. A strong model of anti-jamming (Alexander et al. 2018) has been described which generates distance measurement equipment (DME) signals as an interference source to airborne global satellite navigation system (GNSS). The satellite navigation system uses the lower L band (Galelio E5: 1165–1125 MHz, GPS L5: 1164–1189 MHz) for navigation services and are sharing the same frequency band with DME. Any GNSS receiver operating in the mentioned band will have to deal with them as interference. A hybrid antijamming approach is developed in Mohammad and Mohammad (2018). In this paper author has developed a new anti-jamming system which is proposed for kinematics global position system receives. Author employed a short time Fourier transform (STFT) based pre co-relation block to ensure that the receivers acquire at least four satellites.
In paper (Mosavi et al. 2018), another author has considered wavelet packet transform (WPT). The paper describes a fast and accurate antijamming system. It employs two WPT based interference mitigation block, the pre post correlation mitigation technique employs lower decomposition levels for the WPT based de-noising algorithm because it shares the responsibility of interference mitigation between two blocks. Recently an effective way to minimize GPS interferences utilizes a GPS antenna array capable of changing its gain pattern is developed (Park et al. 2018). In this work a dual polarized antenna array has been proposed instead of one having the capability to mitigate twice the number of interference signal in spatial domain. Long range navigation (LORAN) infrastructure is considered as a backup navigation capability in the next work (Son et al. 2018). Since intentional high power GPS is a significant threat to ships in South Korean water has occurred multiple times in recent years. A different type of arrival based additional secondary factor (ASF) correction method that is applicable to the existing LORAN signal in Northeast Asia has been developed. The objective of the next (Swathi et al. 2015) work is the estimation of the effect of multipath interference at the receiver antenna. As the position accuracy of the GPS is affected by several errors such as delay due to atmosphere, satellite receiver clock error and multipath error.
Dealing with adaptive noise cancellation (Arif et al. 2017) describes as how when a signal is attenuated by some interference adaptive filters are the best solutions of such filters. Here a variant of LMS called q-LMS is investigated for noise cancellation. Elmahay and Moey (2009) improves the performance of GPS signal using multi band limit white noise. First they have identified jamming design issues including fabrication error handling local and remote operations. The solution has been achieved using simulation in Matlab and use of fuzzy logic. Paper Chuku et al. (2018) deals with the enhanced RLS algorithm for beam forming. The result includes enhanced gain factor which in turn reduces a mean square error, A smart satellite navigation system based on multi objective optimization technique has been considered in paper (Lang et al. 2017). The proposed jamming method can reduce the wide nulls and wrong nulls which arises due to common adaptive nulling method. İsmail and Korkut (2017) introduced a simple solution for jamming mitigation of L1 band GPS by electronically switching the antenna beam for wide as well as narrow beamwidths. Sedighy (2018) designed a new anti jamming GPS antenna for effective wireless communications by using antenna array with five microstrip patch antenna in planar array geometry of the proposed system. These all techniques will be used for enhancing the communication efficiency in smart healthcare applications like (Kanimozhi et al. 2018). By reducing the noise in wireless communications, the performance of the smart healthcare systems will be improved greatly. A health care system has been developed for monitoring the patient health conditions and prevent the dead diseases (Sathyanarayana et al. 2018).
3 GPS transmitter design
Particularly two bands in UHF part of EM spectrum are used for GPS signal transmission i.e. L1, centered at 1575.42 MHz, and L2, centered at 1227.60 MHz (Tsui 2005). These frequencies are synchronized with a 10.23 MHz clock. The L1 and L2 signals utilize Code Division Multiple Access (CDMA) to spread spectrum modulation of low bitrate navigation data with high bitrate Pseudo Random Noise (PRN) sequence. There are essentially two kinds of signals: the coarse/acquisition (C/A) and the Precision (P) codes. The real P code isn’t straightforwardly transmitted by the satellite, however it is altered by a Y code, which is frequently alluded to as the P(Y) code. The P(Y) code isn’t accessible to citizen clients and is basically utilized by the military. The P(Y) code is quite similar in properties to P code. For acquisition of P(Y) code, classified codes should be available already (Brown and Gerein 2001; Sickle 2010). Basically, P(Y) codes are derived from the C/A codes i.e. one need to have C/A codes first before acquiring P(Y) code. However, in exceptional cases P(Y) codes can be acquired directly, known as direct Y acquisition. Since we are focusing on civil uses of GPS, therefore our experimental zone limits to the C/A code.
3.1 GPS transmitter
GPS signal was designed in Matlab Simulink version 2016a. Figure 1 shows the GPS transmitter block diagram.

GPS transmitter block diagram
Figure 2 represents the GPS transmitter simulated in Matlab. GPS transmitter having a satellite ID/PRN code, in which we have entered the satellite ID from 1 to 32. We have set a PRN code value (Tx PRN ID) is 3 inside the transmitter and variable symbol rate error both is taken as an input. This transmitter generates an output.

GPS simulation diagram in Matlab Simulink 2016a
Figure 3 shows the GPS data flow based on the amplitude value with time.

GPS data flow based on amplitute and time
Figure 4 shows the GPS signal in time and frequency domain consisting of 38,192 samples.

GPS signal in time and frequency domain consisting of 38,192 samples
Figure 5 shows the GPS L1 signal centered at 9.548 MHz.

GPS L1 signal centered at 9.548 MHz
Figure 3 shows the simulation in time domain and FFT plot, where as Fig. 4 shows the GPS signal frequency spectrum which is centered at 9.545 MHz (Saleem et al. 2017; Staff 2007).
3.2 GPS jammer design
Since the signal from the satellite is very weak typically in Pico watts of power, interference with received signal whether intentional or unintentional becomes easier (Hu and Wei 2009). Radio frequency (RF) signals from any undesired source that are affecting a GNSS receiver are considered interference (Kaplan and Hegarty 2005). Despite the fact that navigation signals have a direct-sequence spread spectrum (DSSS) signal structure, which gives them an intrinsic robustness against interference signals, they are received by receiver antenna at a very low power level. Hence, these signals are vulnerable to in band interference signals (Landry and Renard 1997). Jamming blocks the GPS signals such that it cannot be normally amplified and detected, which finally resulted in GPS receiver’s reduction or completely lost of ability to work (Simon et al. 1994). Moreover, it is used to reduce the noise in wireless communications by reducing the signal to noise ratio (SNR) at receiver sides via the transmission of interfering wireless signals. Figure 6 shows the jammer implemented in Matlab Simulink.

Jammer design in Matlab Simulink
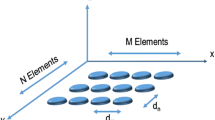
3.3 Antenna array design
The most important antenna array characteristics to focus upon are the number of antennas (N) in the array and the spacing (d) between each two antennas in it. We chose the number of elements from 4 to 10 and spacing in terms of wavelength (Milne 1985).
Figure 7 shows the obtained curve that clearly points out a maximum value for N = 5 and Fig. 8 shows a second highest value for N = 7. As a result, we’ll limit our choice on the number of antennas to these 2 values.

Antenna array characteristics

Adaptive array antenna response pattern for (7, λ/2)
3.4 GPS antijamming
In satellite navigation, interference can be combated in the time, space, or frequency domain, or in a discipline of joint variables of above variables e.g., space-frequency and space-time (Fante and Vacarro 1998) or time-frequency (Chang and Wu 2011). Multiple antenna receivers permit the implementations of spatial nulling and beam-steering based on adaptive beam-forming and high resolution direction finding methods. These approaches can be used as an efficient and effective tools for anti-jamming of GPS.
According to Shannon theory, in the spread spectrum communication, the bandwidth can be increased to reduce the signal-to-noise band in the same channel capacity. Even if the useful signals are covered by the noise, the system can work properly (Hu and Wei 2009). In spread spectrum communication, the spreading gain (Gp) is defined the signal-to-noise ratio of the de-spread devices’ output and the signal-to-noise ratio of receiver input, which represents the ability of suppressing the jamming signal which is input in receiver and enhancing the signal at the same time via spread-spectrum strongeranti processing (Ahamed 2011). The bigger Gp is the stronger anti jamming ability. So as for the ability of anti-jamming spread-spectrum systems, it is necessary to analyze the processing gain. GPS signal is modulated by a pseudo-code before sending out; and the rate of the pseudo-code is much higher than the initial data, which can extend the data bandwidth wider (Devi et al. 2016; Pöpper et al. 2009). The GPS signal of spread spectrum is sent out after being modulated by carrier again and power amplification. So GPS is virtually spread spectrum communications and Gp is a key indicator of anti-jamming ability to measure of GPS as a DSSS system:
In Eq. 1 where, A is the amplitude of the signal d(t) is the data signal, PN(t) is the pseudo-code and wo is the frequency of the carrier.
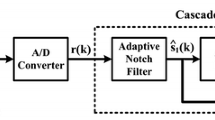
GPS uses two different Gold spreading codes, namely CIA code and P code with the rate of 1.023 × 106 bit/s and 10.23 × 106 bit/s respectively. P code is exclusive for military and does not open to the civil use. In addition, the navigation message data rate is 50 bit/s. According to the spreading gain formula, the CIA code and P code of spreading gain can be calculated. Interference caused by jamming to the GPS signals can be mitigated by using adaptive signal processing. In particular, adaptive array processing techniques allow exploitation of the spatial domain for improved jamming suppression and signal protection. Figure 9 shows the antijammer GPS tracker.

Antijammer GPS tracker
The input GPS signal consisting of 38,192 samples was collected at 450 azimuthal angles to adaptive antenna array. Noise and interference were modeled separately using random sequence and applied to antenna array to see the effect of these interference signals. Two interference at azimuthal angles of 350 and 550 were modelled using the Matlab code. Figures 10, 11, 12, 13, 14 and 15 shows the simulation results obtained in Matlab Simulink 2017.

Actual transmitted GPS signal

White Gaussian noise

Jammed signal (noisy signal)

Resultant signal after processed through LMS adaptive filter (recovered signal)

FFT plot of recovered signal

LMS algorithm block diagram
Figure 10 shows the time v/s amplitude plot of 38,192 samples of GPS signals. AWGN noise was generated with 38,192 samples, the noise power was kept five times greater than GPS signal, Fig. 11 shows the noise amplitude and time plot. Figure 12 is the jammed data or the interfered signal in which the noise and original GPS signal were added.
LMS adaptive filter characteristics is shown in Fig. 13, input to this filter was the jammed signal as shown in Fig. 12, and the FFT plot of output of the filter is shown in Fig. 8e. By comparison of from Fig. 14 and Fig. 3, it is clear that noise mitigation from GPS signal is possible using LMS Algorithm.
A number of algorithms have been developed in recent years which are often recursive in nature such that their weight vector is prone to adapt the continuously changing RF environment. In this paper LMS and RLS algorithms have been discussed, in LMS approach, gradients are estimated from the available data i.e. by making use of x(n)e(n) rather than ensemble averages for a chosen optimum step size. LMS algorithm is defined as follows:
where e(n) = d(n) − d^(n).
Above Eq. 2 does not require calculation of correlation functions and matrix inversion, therefore LMS becomes very simple approach for adaptive filters weight update. Figure illustrates how the LMS algorithm can be applied to anti- jamming of GPS signal for noise and interference mitigation (Feng and Bao 1998; Giovanis 2010; Gui and Adachi 2013).
3.5 RLS algorithm
RLS algorithm is another potential alternative to overcome slow convergence in colored environments, which uses the least square method to develop a recursive algorithm for the adaptive transversal filter. RLS tracks the time variation of the process to the optimal filter coefficient with relatively very fast convergence speed; though it has increased computational complexity and stability problems as compared to LMS based algorithm (Dixit and Nagaria 2017; Vahidi et al. 2005) (Fig. 16).

RLS algorithm block diagram
Output signal from the FIR filter
where, u(n) is the filter input vector and w(n) is the filter coefficient vector
An error signal depends on the filter coefficients
The next step is to update the filter coefficients using following equation
where \(\mu\) is the step size of the adaptive filter.
4 Results and discussion
The proposed model has been implemented by using the MatLab. Moreover, the various experiments have been conducted for evaluating the performance of the proposed model.
4.1 Performance in case of interference
See Fig. 17.

Performance in case of interference using LMS
4.2 Correlation results
It was seen that in case of only one interference arriving at 35° was easily combated and results were satisfactory in terms of carrier frequency and code phase shift but in case of two interfaces arriving at two different angles viz. 35° and 55° were combated in terms of frequency only instead the LMS could not correctly identify the correct code phase shift of 45 chips. Also the LMS algorithm failed to combat the interference having power more than five times of original GPS signal power. In a real case scenario noise is always present along with interference to the receiver therefor it is obvious that interference power that can be tackled with these algorithms will reduce (Fig. 18).

Correlation results
Same simulations were analyzed with other anti jamming algorithms (RLS) and the performance in case of noise only showed improvement in terms of noise power with respect to signal power:
In case of single interference the RLS antijamming algorithm was shown similar results with an increased interference power with respect to original GPS signal. The noticeable improvement of RLS over LMS algorithm was shown in the case of two interference arriving at two different angles to the adaptive array antenna with respect to the GPS signal arriving at 45°. This algorithm was able to combat the interference having power more than seven times relative to GPS signal in terms of frequency as well acquisition of correct code phase shift (Fig. 19).

Performance in case of interference using RLS
It’s obvious that the RLS antijamming system exceeds the LMS system in performance by many times, despite any errors that may occur with it. One of the principal reasons behind that is the variable step size of the RLS filter that is adapted by the filter itself to produce the best results, unlike the fixed pre-determined step size in the case of LMS. But on the other hand, we can clearly realize from simulation tests that LMS needs much less execution time than RLS.
5 Conclusion and future works
GPS system measures various satellite positions located in the space and showing the exact position of the satellite with the help of the scatter plot. Here, we have calculated the value of navigational parameters such as position of the satellite on the world latitude or longitude, velocity, altitude and error, etc. The proposed system has been used for collecting the information on for the satellites that are view in provisions the number of satellites are being tracked, the satellite ID/PRN (pseudo random noise) and parameters like SNR (signal to noise ratio) of the capture satellite signal. Moreover, the proposed model is used to collect the patients detail from different locations without any delay and also helps to store in database of smart health care service oriented applications for enhancing the smart health service.
References
Ahamed S (2011) Performance analysis and special issues of code division multiple-access techniques for wireless applications. J Theor Appl Inf Technol 2(6):244–248. https://doi.org/10.1007/978-3-642-22786-8_39
Alexander S, Thanawat T, Jaron S (2018) Modelling distance measurement equipment (DME) signals interfering an airborne GNSS receiver. J Inst Navig 65(2):221–230. https://doi.org/10.1002/navi.230
Amin MG, Zhang Y (2002) Interference suppression in spread-spectrum communication systems. Encycl Telecommun. https://doi.org/10.1109/ISSSTA.1996.563782
Amin MG, Zhao L, Lindsey AR (2004) Subspace array processing for the suppression of FM jamming in GPS receivers. IEEE Trans Aero Electron Syst 40:80–92. https://doi.org/10.1109/ACSSC.2000.910664
Arif M, Naseem I, Khan SS, Ammar MM (2017) Adaptive noise cancellation using q-LMS. In: International conference on innovations in electrical engineering and computational technology (ICIEECT). Indus University, Karachi, Pakistan, pp 1–4. https://doi.org/10.1109/ICIEECT.2017.7916527
Brown A, Gerein N (2001) Direct P(Y) code acquisition using an electro-optic correlator. In: The proceedings of ION national technical meeting, pp 1–8. https://pdfs.semanticscholar.org/5374/1347a211e00cf195934f3e2ab53c246e4a81.pdf
Chang CL, Wu BH (2011) Analysis of performance and implementation complexity of array processing in anti-jamming GNSS receivers. Electr Electron Eng 1:79–84. https://doi.org/10.5923/j.eee.20110102.13
Chuku P, Olwal T, Djouani K (2018) Adaptive array beamforming using an enhanced RLS algorithm. Int J Ad Hoc Netw Syst 8:13–18. https://doi.org/10.5121/ijans.2018.8101
Devi BS, Mary JJ, Aseer GMB (2016) Comparative analysis of direct sequence spread spectrum using rabbit stream cipher. Int J Adv Res Electron Commun Eng 5(10):2373–2379. http://ijarece.org/wp-content/uploads/2016/10/IJARECE-VOL-5-ISSUE-10-2373-2379.pdf
Dixit S, Nagaria D (2017) LMS adaptive filters for noise cancellation: a review. Int J Electr Comput Eng 7:2520. https://doi.org/10.11591/ijece.v7i5.pp2520-2529
Elmahay H, Moey M (2009) Improving the performance of anti GPS signal. In: Proceedings of the 8th WSEAS international conference on signal processing, pp 17–25. https://www.researchgate.net/publication/228896687_Improving_the_performance_of_anti-GPS_signal/stats
Fante RL, Vacarro JJ (1998) Cancellation of jammers and jammer multipath in a GPS receiver. IEEE Aerosp Electron Syst Mag 13:25–28. https://doi.org/10.1109/62.730617
Fante RL, Vaccaro JJ (2000) Wideband cancellation of interference in a GPS receive array. IEEE Trans Aerosp Electron Syst 36(2):549–564. https://doi.org/10.1109/7.845241
Feng DZ, Bao JLC (1998) Total least mean squares algorithm. IEEE Trans Signal Process 46:2122–2130. https://doi.org/10.1109/78.705421
Getting IA (1993) Perspective/navigation-the global positioning system. IEEE Spectr 30:36–38
Giovanis E (2010) Applications of least mean square (LMS) algorithm regression in time-series analysis. Technical Report, pp 1–24. https://doi.org/10.2139/ssrn.1667440
Gui G, Adachi F (2013) Improved least mean square algorithm with application to adaptive sparse channel estimation. EURASIP J Wirel Commun Netw 2013:204–216. https://doi.org/10.1186/1687-1499-2013-204
Hu H, Wei N (2009) A study of GPS jamming and anti-jamming. In: 2009 2nd international conference on power electronics and intelligent transportation system (PEITS), vol 1. Shenzhen, China, pp 388–391. https://doi.org/10.1109/PEITS.2009.5406988
İsmail Ş, Korkut Y (2017) Reconfigurable antenna for jamming mitigation of legacy GPS receivers. Int J Antennas Propag 2017:1–7. https://doi.org/10.1155/2017/4563571
Kanimozhi U, Ganapathy S, Manjula D, Kannan A (2018) An intelligent risk prediction system for breast cancer using fuzzy temporal rules. Natl Acad Sci Lett. https://doi.org/10.1007/s40009-018-0732-0(available in online)
Kaplan E, Hegarty C (2005) Understanding GPS: principles and applications: artech house. https://www.navtechgps.com/assets/1/7/10241.PDF
Landry JR, Renard A (1997) Analysis of potential interference sources and assessment of present solutions for GPS/GNSS receivers. https://lassena.etsmtl.ca/IMG/pdf/doc_25.pdf
Lang R, Xiao H, Li Z, Yu L (2017) An anti-jamming method satellite navigation system based on multi objective optimization technique. PLoS One 12(7):e0180893. https://doi.org/10.1371/journal.pone.0180893
Li F, Wu R, Wang W (2016) The anti-jamming performance analysis for vector tracking loop. In: Sun J, Liu J, Fan S (eds) China satellite navigation conference (CSNC) 2016 proceeding, vol 1. Springer, Singapore, pp 665–675. https://doi.org/10.1007/978-981-10-0934-1_57
Milne R (1985) A small adaptive array antenna for mobile communications. In: IEEE Antennas and propagation society international symposium, Digest. Held in conjunction with: USNC/CNC/URSI North American Radio Sci. Meeting (Cat. No.03CH37450), Columbus, OH, USA, pp 797–800. https://pdfs.semanticscholar.org/fc57/5778f9043cc58fea4b211c1b1bdb9b4a70e3.pdf
Mohammad JR, Mohammad RM (2018) Hybrid anti-jamming approach for kinematic global positioning system receivers. IET Signal Process 12(7):888–895. https://doi.org/10.1049/iet-spr.2017.0221
Mosavi MR, Pashain M, Rezeai J (2018) A fast and accurate anti jamming system based on wavelet packet transform for GPS receivers. GPS Solut 21(2):415–426. https://doi.org/10.1007/s10291-016-0535-z
Mousavi SM, Harwood A, Karunasekera S, Meghrebi M (2018) Enhancing the quality of geometries of interest (GOIS) extracted from GPS trajectory data using spatio-temporal data aggregation and outlier detection. J Ambient Intell Hum Comput 9(1):173–186. https://doi.org/10.1007/s12652-016-0426-8
Park K, Lee D, Seo J (2018) Dual polarized GPS antenna array algorithm to adaptively mitigate a large number of interference signals. Aerosp Sci Technol 78:387–396. https://doi.org/10.1016/j.ast.2018.04.029
Parthasarathy J (2006) Positioning and navigation system using GPS. Int Arch Photo Remote Sens Spat Inf Sci 36:208–212. http://www.isprs.org/proceedings/XXXVI/part6/208_XXXVI-part6.pdf
Pöpper C, Strasser M, Capkun (2009) Jamming-resistant broadcast communication without shared keys. In: USENIX security symposium, pp 231–248. https://dl.acm.org/citation.cfm?id=1855783
Saleem T, Usman ME et al (2017) Simulation and performance evaluations of the new GPS L5 and L1 signals. Wirel Commun Mob Comput 2017:1–4. https://doi.org/10.1155/2017/7492703
Sameer K, Joel S (2003) Evolution of GPS technology and its subsequent use in commercial markets. Int J Mob Commun 1(1–2):180–193. https://dl.acm.org/citation.cfm?id=1361300
Sathyanarayana S, Satzoda R, Sathyanarayana S, Thambipillai S (2018) Vision-based patient monitoring: a comprehensive review of algorithms and technologies. J Ambient Intell Hum Comput 9(2):225–251. https://doi.org/10.1007/s12652-015-0328-1
Sedighy H (2018) Null steering GPS array in the presence of mutual coupling. Iran J Electr Electron Eng 2:116–123. http://ijeee.iust.ac.ir/article-1-1130-en.pdf
Sickle JV (2010) The P and C/A codes. https://www.e-education.psu.edu/geog862/node/1741
Simon MK, Omura JK, Scholtz RA, Levitt BK (1994) Spread spectrum communications handbook. http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.457.7299&rep=rep1&type=pdf
Son PW, Rhee JH, Seo J (2018) Novel multichain based loran positioning algorithm for distant navigation. IEEE Trans Aerosp Electron Syst 54:666–679. https://doi.org/10.1109/TAES.2017.2762438
Spilker JJ (1978) GPS signal structure and performance characteristics. Navigation 25:121–146. https://doi.org/10.1002/j.2161-4296.1978.tb01325.x
Staff GW (2007) GPS transmitter frequencies. GPS world, 2018th edn. https://www.gpsworld.com/gps-transmitter-frequencies/
Sun W, Amin MG (2005) A self-coherence anti-jamming GPS receiver. IEEE Trans Signal Process 53:3910–3915. https://doi.org/10.1109/TSP.2005.855428
Swathi N, Indira Dutt VBSS, Rao SB (2015) An adaptive filter approach for GPS multipath error estimation and mitigation. In: Microelectronics electromagnetics and telecommunication proceeding of ICMEET, pp 539–546. https://doi.org/10.1007/978-81-322-2728-1_50
Tsui JBY (2005) Fundamentals of global positioning system receivers: a software approach, vol 173. Wiley, New York. http://twanclik.free.fr/electricity/electronic/pdfdone7/Fundamentals%20of%20Global%20Positioning%20System%20Receivers.pdf
Vahidi A, Stefanopoulou A, Peng H (2005) Recursive least squares with forgetting for online estimation of vehicle mass and road grade: theory and experiments. Veh Syst Dyn 43(1):31–55. https://doi.org/10.1080/00423110412331290446
Ying RC (2018) Wavelet packet transform based antijamming scheme with new threshold selection algorithm for GPS receivers. J Chin Inst Eng 41(3):181–185. https://doi.org/10.1080/02533839.2018.1454857
Zhang Y, Amin MG (2001) Array processing for nonstationary interference suppression in DS/SS communications using subspace projection techniques. IEEE Trans Signal Process 49:3005–3014. https://doi.org/10.1109/78.969509
Zhang Y, Amin MG, Lindsey AR (2001) Anti-jamming GPS receivers based on bilinear signal distributions. In: Military communications conference on communications for network-centric operations: creating the information force, pp 1070–1074. https://doi.org/10.1109/MILCOM.2001.986006
Zhang HP (2006) Study on GPS based China regional ionosphere monitoring and ionospheric delay correction. Ph.D. Dissertion, Shangai Astronomical Observatory, Chinese Academy of Sciences, Shanghai, China
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Kumari, R., Mukhopadhyay, M. Design of GPS antijamming algorithm using adaptive array antenna to mitigate the noise and interference. J Ambient Intell Human Comput 11, 4393–4403 (2020). https://doi.org/10.1007/s12652-019-01187-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12652-019-01187-4