
Abstract
Recent technologies have allowed researchers to observe animal behaviour and monitor their surrounding environments by deploying electronic sensors onto the animals. So-called ‘bio-logging’ (also known as animal telemetry, biotelemetry, or animal-borne sensors) has been widely used to study marine animals that are difficult for humans to observe. In this study, we (1) review the types of sensors used, the animal taxa studied, and the study areas in marine bio-logging publications from 1974 to 2019; (2) introduce the main topics in behavioural and environmental marine bio-logging studies; and (3) discuss suggestions for future marine bio-logging studies. We expect that technological advances in new sensors will enhance the ability of both behavioural ecologists and oceanographers to explore animal movements, physiology and marine environments. In addition, we discuss future perspectives of bio-loggers to improve data acquisition and accuracy with longer battery life for applying bio-logging techniques to broader species.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Modern technologies have allowed us to use small electronic devices attached to animals to log data. The attachment of biological sensors onto animal bodies has enabled researchers to collect behavioural data from free-ranging animals in wild conditions. The technique has been widely used to study animals that are difficult to observe, such as marine species, measuring both movement information and physiological characteristics, such as heart rate and brain waves (Ropert-Coudert and Rory 2005; Wilmers et al. 2015; Heylen and Nachtsheim 2018). It can also be applied to gather environmental information about the animal’s surroundings, such as the temperatures and conductivity of marine water mass (Boehme et al. 2009; March et al. 2020). With these advantages, bio-logging techniques have been a popular and useful tool to study environmental science, ecology, oceanography, and zoology (Hussey et al. 2015; Harcourt et al. 2019).
There are multiple terms used to describe these remote observation systems for logging data about an animal’s behaviour, physiology, or environment (see Table 1). ‘Biotelemetry’ was originally used to describe the remote observation of marine life in situ (Amlaner and MacDonald 1980) and then, a new word, ‘bio-logging’ was suggested (Naito 2004) and defined as “the use of miniaturised animal-attached tags for logging and relaying animal movement for behaviour ecology, and physiology” (Rutz and Hays 2009). In addition, the terms ‘animal telemetry’ (Block et al. 2016) and ‘animal-borne instrument/device/sensor’ (McMahon et al. 2005; Jones et al. 2013) are often used. Hereafter, we will primarily use the term ‘bio-logging’ for these remote observation systems throughout the text.
Modern types of bio-logging were initiated after Kooyman (1965), when time-depth recording devices were used on Weddell seals (Leptonychotes weddelli) (Wilmers et al. 2015). Bio-logging was further applied to study emperor penguins (Kooyman et al. 1971) and fur seals (Kooyman et al. 1976). Subsequently, logging duration capacity was improved to record data for more than 3 months (Naito et al. 1990). After that, heart rate and swim speed recorders were deployed alongside time-depth recorders to study emperor penguin diving activity (Castellini et al. 1992). In the 1990s, satellite positioning technology called ‘Platform Transmitter Terminals (PTTs)’ were developed and used to record the location of marine animals, including crabeater seals (Lobodon carcinophaga) (Bengtson et al. 1993). In addition to collecting location data, video-cameras were attached to sea turtles to film their movement (Marshall 1998). Most recently, satellite relayed data loggers were combined with a multiple sensor (a conductivity, temperature and depth sensor, referred to as a ‘CTD’) (Boehme et al. 2009) and used to measure physical oceanographic conditions, including salinity and temperature in deep water sending the data back via satellites.
Here, we review the types of sensors in marine bio-logging studies, outline recent studies, and discuss future directions. To investigate the research trends in marine bio-logging, we searched for publications through Web of Science (www.webofknowledge.com) (Fig. 1). For the analysis of articles about bio-logging from 1960 to 2019, we searched articles containing the keywords “((“biologging”) OR (“bio-logging”) OR (“biotelemetry”) OR (“biologger”) OR (“bio-logger”) OR (“animal telemetry”) OR (“animal-borne telemetry”)) AND (“marine”)”. This search yielded 19,641 publications. The annual number of publications involving bio-logging studies has increased sharply since 1990. In 2019, more than 300 papers are being produced per year. When we included the “marine animal” keyword, the publication rate has greatly increased since 2000 and reached 600 publications from 1974 to 2019, across various taxa that are globally distributed along coasts and islands. Recently, over 50 papers are being annually produced annually.

The number of publications related to bio-logging studies (1960–2019)
2 Data Collecting Methods of Bio-loggers
Bio-loggers obtain various types of data using different methods. We categorised the bio-logging methods into two categories, according to the purposes of the sensors: ‘behavioural bio-logging’ and ‘environmental bio-logging’. Behavioural bio-logging includes location, dive depth, audio, video, cardiograph, and brain wave data, which could contribute to constructing animal behaviour studies. In environmental bio-logging, the purpose of animal attachment is to collect physical oceanographic variables. The animal-derived hydrographic data involves recording parameters including temperature, conductivity, fluorescence for chlorophyll concentration and dissolved oxygen in the water. We summarised the characteristics of each type of sensor commonly used for marine research (Table 2).
3 Behavioural Bio-logging Technologies
3.1 Global Positioning System (GPS)
A Global Positioning System (GPS) determines the animal positions from satellite signals, which are acquired from the three-dimensional positioning system of the United States Department of Defense, which achieved 24-h world coverage in 1973. GPS receivers deduce location information from distances calculated from measured time, using at least four satellites (Tomkiewicz et al. 2010). A GPS consists of three segments: a space segment, a control segment, and a user segment (Rodgers et al. 1996). The space segment consists of 24 satellites and several backup satellites circling around the earth twice a day. The control segment is run by five ground monitoring stations located around the world and a master control station at the Consolidated Space Operational Center in the United States. This segment maintains the standard system time and calculates exact orbital information. The user segment is a GPS receiver which measures the time of signal arrivals. With the combination of these three segments, GPS can obtain the accurate location (< 10 m) of the GPS receiver. Furthermore, when GPS was launched, the United States precluded civilian users from receiving high-resolution location data; however, the United States eventually decided to stop degrading public GPS accuracy, leading to massive increases in the field of animal tracking since 2000 (Kays et al. 2015).
GPS trackers are often applied to light vertebrates, like small marine birds (Delord et al. 2020), as well as large whales (Mate 2012). GPS receivers consume more power than other types of sensors, so power management is a critical element, along with the weight of the bio-logger and the operational period. Even new, low-power GPS receivers require solar panels to recharge them for extended-period logging (Tomkiewicz et al. 2010). GPSs do not have any internal data transmitting systems so bio-loggers using GPS often use Very High Frequency (VHF), Global System for Mobile Communications (GSM) or Advanced Research and Global Observation Satellite (Argos) systems to send the data obtained from the GPS receiver (del Villar-Guerra et al. 2012; Cox et al. 2018).
3.2 Argos Data Collection and Locating System
Argos Data Collection and Locating Systems (also called Collection and Location via Satellites (CLS) systems) use Argos satellites to determine the position of the tags. The satellites were launched in 1978 by the French Space Agency (Centre National D'Etudes Spatiales), the National Aeronautics and Space Administration (NASA) and the National Oceanic and Atmospheric Administration (NOAA). The CLS system obtains the location of transmitters by signals emitted from the local transmitters, not from the satellites. If a ground-based transmitter sends radio waves at a certain frequency and NOAA satellites receive the signals, the satellites calculate back the doppler shifts of the radio waves, which can be exchanged to estimate the location of transmitters by comparing it with their own location. The satellite data are sent to tracking stations and transferred to processing centres in Maryland and France (Fancy et al. 1988). Obtained locations are classified into one of seven location classes (3, 2, 1, 0, A, B, Z in descending order of accuracy). Most of the location information of marine animals are in 0, A, B, or Z (Costa et al. 2010b; Irvine et al. 2020).
The CLS system is a part of the Argos System, which is a worldwide data collecting system. Because it uses the Argos system, the CLS system has the advantage of not needing to retrieve the tag to obtain the information—unlike GPS. Because of this advantage, bio-loggers that collect data from various sensors and transmit the data via the Argos system are widely developed and used.
Although the CLS system provides less accurate (< 150 m: LC3) location information than GPS, the acquired location information is directly transmitted online. In the CLS system, the local transmitters just send radio waves to the satellites and do not calculate the position or save it, so bio-loggers using the CLS system are lighter than those using satellite GPS (Bridge et al. 2011). Recently, many other types of information also can be transferred via Argos system within bandwidth limits and recent bio-loggers have been produced for transmitting information obtained from various sensors via the Argos system.
3.3 Geolocation Systems (Global Location Sensing or GLS)
Geolocation is a positioning system which employs a light sensor and an accurate real-time clock to check the time of sunrise and sunset. Then, longitude and latitude data are calculated by the time of solar noon and the length of the day, respectively (Bridge et al. 2011). Geolocators obtain location only based on data from the light sensor, not from satellites. Therefore, it is the smallest and lightest sensor (< 0.5 g) among location-determining sensors, so they can be attached even to small flying birds. The light sensors consume very little energy, so they can be attached to log long periodic movements like migrations. However, geolocators can yield large errors with regard to positioning (approximately under 200 km) (Phillips et al. 2004; Bridge et al. 2011). In addition, they can only generate up to one location per day and are affected by weather conditions (Lisovski et al. 2012). To improve spatial accuracy, temperature sensors can be used with GLS for marine bio-logging (Teo et al. 2004).
Because of these characteristics, geolocators can be used to study long-term behaviours, even in small animals. In marine animal studies, geolocators have been particularly useful when attached to migratory marine birds because they usually move for long distances between the breeding and non-breeding seasons. Many marine animals have been instrumented with geolocators (Hindell et al. 2020), including penguins (Barrionuevo et al. 2020), seabirds (Croxall et al. 2005; Shaffer et al. 2006), and seals (Staniland et al. 2018).
3.4 Video-Recorders
Video-recorders are filming devices that capture videos from the animals. Researchers can obtain detailed visual and sound information from the perspective of the animals by collecting continuous environmental images and audio (Marshall 1998; Marshall et al. 2007; Davis et al. 1999). Video-recording devices are relatively large and heavy compared to other sensors with high storage and power consumptions. Thus, researchers use these loggers solely for filming under specific conditions (Hernandez et al. 2018) and often use them for a short period of time (Semmens et al. 2019). This approach has been applied to seabirds (Tremblay et al. 2014), seals (Davis et al. 1999), whales (Goldbogen et al. 2012), turtles (Heaslip et al. 2012) and sharks (Jewell et al. 2019) to reveal foraging patterns and environments.
Although we categorised video-recorders into behavioural bio-loggers, they can be also applied to collect environmental data about prey availability and oceanic conditions, to provide information regarding conservation efforts with respect to endangered species (Parrish et al. 2000; Moll et al. 2007).
3.5 Accelerometers and Gyroscopes
Accelerometers and gyroscopes are used to measure acceleration and body posture. Accelerometers can measure the acceleration vectors of animal movements and gravity, while gyroscopes can measure the rate of rotation of animals (Ware et al. 2016). Therefore, only with accelerometers can the posture of animals be estimated by extracting the gravitation vector (Yoda et al. 2001). However, only with gyroscopes can acceleration signals caused by rotation be added. Thus, gyroscopes are commonly used to provide information to remove the confounding factor of rotations, allowing the posture of the animal to be obtained more accurately (Ware et al. 2016). Acceleration information also allows the estimation of energy expenditure. Furthermore, with accelerometers attached to various parts of the body, the movement of different parts of the body, like limbs or heads, can be assessed. Consequentially data about specific behaviours, such as limb or jaw movements, can be acquired (Shepard et al. 2008).
Investigating the underwater movements of marine animals has been problematic as GPS and CLS systems do not work underwater. Accelerometers can be used to deduce detailed underwater movement (this process called ‘dead reckoning’) (Shepard et al. 2008; Shiomi et al. 2008; Fourati et al. 2013; Cianchetti-Benedetti et al. 2017). The performance of the accelerometer can reach intervals of 300 Hz, but to overcome limitations of battery life and storage, it is necessary to measure acceleration at a reasonable frequency (Fourati et al. 2011; Cooke et al. 2016).
Accelerometers to the head and jaw of sea mammals were applied to record their prey capture rates (Viviant et al. 2010) and the head and body movements of diving birds were used to distinguish the prey items and examine the feeding frequency (Watanabe and Takahashi 2013). Thus, it can be applied to reconstruct the detailed diving trajectory with the prey capture movements of marine predators.
3.6 Time-Depth Recorders (TDR)
Time-Depth Recorders (TDRs) measure water pressures and use this information to interpret dive depth at specific time intervals. Since Kooyman deployed them on seals in Antarctica in 1964 (Kooyman 1965), they have been used as a fundamental bio-logger to collect information about the vertical movement of marine animals in the water column. TDRs consume relatively little energy so they have been applied for long-term observations. As early as 1987, they were used to cover the post moulting period of seals, which lasts up to three months (Naito et al. 1989). However, as they are limited to measuring only one-dimensional depth information, they are often used in conjunction with other sensors, like a GPS or video-camera (Casey et al. 2014; Choi et al. 2017; Mallett et al. 2018).
3.7 Electrocardiograms and Electroencephalograms
Electrocardiogram (ECG) sensors are used to monitor the electric activity of the heart. Using two electrodes in different body parts, ECGs record the voltages representing the depolarisation and repolarisation patterns associated with a heartbeat. Heart rate enables the estimation of energy expenditure and oxygen consumption (Kooyman et al. 1992) because many marine mammals and birds store oxygen and minimise oxygen depletion during diving (Kooyman and Ponganis 1998). This makes ECGs important in marine ecological studies because marine animals, especially air-breathing animals like whales, dolphins, and turtles, have adopted their own specific strategies to optimise diving behaviour. In a recent report on blue whales (Balaenoptera musculus), the ECG sensors revealed their heart rate changes during and after dives (Goldbogen et al. 2019).
Electroencephalogram (EEG) sensors also operate with electrodes, like ECGs. The electrodes receive brain waves while fixed inside the skull, penetrating the medulla (Whitford and Klimley 2019). The logger directly recognises brain waves, tracking sleep and rest activities, and measuring how actual behaviour relates to brain activity (Mascetti 2016). Despite the technical difficulties involved in inserting the electrodes into the brain, EEG signals are very important for studying animal sleep behaviours, such as unilateral sleep (Rattenborg et al. 1999) or sleep during the flight (Rattenborg et al. 2016). Marine mammals and birds usually have unique sleep behaviour compared to their terrestrial counterparts and EEGs can help to uncover these sleep patterns. Using EEG sleep loggers, it was discovered that northern fur seals have the ability to maintain asymmetrical sleep by opening one eye for vigilance as an adaption to avoid predation (Lyamin et al. 2017).
3.8 Acoustic Positioning System
Acoustic positioning systems provide position information for marine animals in the water. An acoustic positioning system consists of three components: a transmitter, more than three stationary hydrophones, and a base station. The transmitters are attached to target animals and send ultrasonic signals to the stationary hydrophones, which are usually attached to buoys. Each hydrophone receives the ultrasonic signals at different times, according to the position of the transmitter. The signals are sent to the base station and the information converted into the location of the transmitter (Klimley et al. 2001). Acoustic positioning systems can help to determine three-dimensional position coordinates underwater, so they are very useful in marine ecological studies. They are often applied to examine the movement patterns or habitat use of benthic fish, including white sharks (Carcharodon carcharias) (Voegeli et al. 2001).
4 Environmental Bio-logging Technologies
4.1 Conductivity-Temperature-Depth (CTD) System
Conductivity-Temperature-Depth (CTD) instruments measure physical oceanographic conditions, such as conductivity and temperature with dive depth. Conductivity is used for the calculation of salinity according to pressure and temperature. The sensors have an inherent resolution or error scales and differ in their technological levels.
CTD tagging surveys have been conducted mainly on pinniped species, since capturing and tagging them is also easier than, for example, cetacean species, as they haul-out on land to rest and lactate their pups, making it easier to attach CTD tags. Elephant seals (Genus Mirounga) are one of the most widely used marine species in bio-logging studies, and this is related to their dive capacity. Maximum dive depths of 2388 m by a southern elephant seal (M. leonina) (Costa et al. 2010a) and 1735 m by a northern elephant seal (M. angustirostris) (Robinson et al. 2012) have been recorded. Similar to the ocean glider system, in addition, seal-borne CTDs enable researchers to evaluate a broad range of marine habitats, from Arctic to Antarctic regions, including polar oceans, which are covered by thick sea ice areas and are inaccessible to research vessels during the winter (Treasure et al. 2017). Compared to physical oceanographic surveys by research vessels, seal-borne CTD can be highly cost-effective as efforts to break sea ice and the inputs of large CTD devices (Hussey et al. 2015) are not required. Seal-borne CTD surveys contribute to international observation networks for studying recent oceanographic changes, such as the Southern Ocean Observing System (SOOS) (Roquet et al. 2013; Newman et al. 2019). Seal-borne CTD data sets with satellite data sets, shipboard measurement and mooring systems uncovered weaknesses of Sabrina Coast in East Antarctica and the Amundsen Sea in West Antarctica by detecting the reduction of formation Dense Shelf Water (DSW) in Cape Darnley polynya (Ohshima et al. 2013; Silvano et al. 2018). In Antarctica, seal-borne CTD data exhibited frontal structure exhibited by seal-borne CTD, sea ice formation and sea ice model along the Antarctic Circumpolar Current (ACC) region and Polar Front (PF) (Biuw et al. 2007; Charrassin et al. 2008; Siegelman et al. 2019; Biddle and Swart 2020) and physical processes of nutrients turnover and biological aggregation (McGillicuddy and Robinson, 1997; Lévy et al. 2018).
4.2 Fluorometer and Oxygen Sensor
In the context of biogeochemical circulation, chlorophyll-a concentration indicates primary production in the ocean as a key component of global carbon cycling. Because primary production is a crucial part of marine species food webs and is influenced by the stratification of oceanic water, including circumpolar deep water from Antarctica, the device is most effective when attached to deep-diving marine mammals. For instance, tagged southern elephant seals distributed along polar fronts may provide primary production values through archival TDR tags and fluorometers which are not easily acquired using in-situ measurement techniques (Lander et al. 2015).
The development of combination CTD-SRDLs and fluorometer devices (CTDF) occurred earlier than those combined with dissolved oxygen sensors (Roquet et al. 2011). The device records fluorescence data at a frequency of 1 Hz while it is upward-casting (Boehme et al. 2009). Keates et al. (2020) recently deployed CTDFs on nothern elephant seals and successfully obtained raw fluorescence data in the northeastern Pacific. These brand-new CTDF devices (SMRU, St. Andrews, Scotland) detect chlorophyll with a minimum level of 0.03 μgL−1 at an excitation wavelength of 465 nm and an emission wavelength of 696 nm for detection. Fluorometer calibration procedures were also introduced to conduct chlorophyll extraction procedures following a traditional standard method (Holm-Hansen et al. 1965; Welschmeyer 1994). For more detailed calculations, the devices can be calibrated region-specifically using satellite ocean surface data and may provide researchers with cost-effective measurements of primary production near animal habitats.
The combination of CTD-SRDLs and dissolved oxygen sensors also provides the possibility of monitoring oceanographic conditions surrounding marine animals. Atlantic salmons (Salmo salar) were utilized to monitor incoming hypoxic seawater conditions by tagging them with acoustic telemetered sensors which nearly simultaneously record pressure (0–102 m), temperature (0–25 °C) and dissolved oxygen (0–140%) (Stehfest et al. 2017). The continuous investigation of oceanic biogeochemical conditions in terms of global ocean circulation is crucial to understanding unseen marine ecosystems and collecting more detailed information about bottom water formation. A technical revolution leading to the miniaturisation of multi-sensor loggers, including the battery, transmitter, and either environmental or biological data measuring sensors, would provide oceanic information facilitating our understanding of animal surroundings of unknown regions and their variability (Hussey et al. 2015).
4.3 Hydrophone and Echosounder
Underwater ambient noise mainly consists of biophony (by marine animal activities), geophony (by physical processes of waves or current), and anthrophony sounds (by shipping or oil surveys) (Knudsen et al. 1948; Wenz 1962). To collect the marine soundscape, hydrophones at the bottom or fixed at certain depths had been used. However, recent animal-borne acoustic recording allowed researchers to acquire data from freely moving diving animals (Cazau et al. 2017). These methods contribute to observing marine environments to better understand regional backgrounds and risks from ecosystems, topography, climate and human impact.
Animal-borne echosounders were proposed to detect prey distribution using a micro echosounder on marine species (Miyamoto et al. 2004). Deployment of echosounders was applied to northern elephant seals to identify behaviour of echolocation marine mammals and prey distribution by acoustic backscattering (Lawson et al. 2015). Although sonar tag systems were relatively heavy (4.34 kg in air and 1.7 kg in water) and had a short battery life (up to 8–10 days), researchers could quantify prey information (Lawson et al. 2015). Animal-borne echosounders can be also used with other sensors, such as accelerometers and GPS (Goulet et al. 2019). Such combined multisensory systems would provide data about fine-scale predator–prey interactions.
5 Global Distribution of Marine Animal Bio-logging Studies
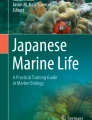
Among the 600 publications on marine animal bio-logging studies, which were searched from Web of Science (Fig. 1 and Table 3), we excluded 64 publications on reviews and methodologies. Then, from the 536 studies, we marked the coordinates of the tagging sites published and categorised them by animal taxa (Fig. 2). The distribution is represented by the total numbers of papers (n = 536, published from 1974 to 2019) and shown by taxon (indicated by different colours). The pie chart shows the proportion of publications in order of numbers of publications about each taxon. Marine mammals were the most studied taxa (32.4%). Fish (29.4%), seabirds (21.9%) and reptiles (12.95) were the next most studied taxa. Studies on Crustacea (spring Green), Cephalopods (magenta), Bivalve (violet), Gastropods (orange) and Scyphozoa (dark Green) comprise 3.4% of the total number of publications. The marine bio-logging studies were globally distributed from Antarctica to the Arctic, mainly along coastal regions and islands. Marine mammals, fish, birds and reptiles dominantly featured in the publications. Bio-logging of marine mammals and avian species represented nearly 32% and 22% of the studies, respectively. To understand marine ecosystems, it is important to study the foraging behaviour of marine predators. Fine-scale behavioural and oceanographic studies are increasing with revolutionary developments in sensor technologies. In Antarctic ecosystems, the foraging strategies of seals and penguins have been examined for mesoscale variance related to ocean frontal structures (Bost et al. 2009). As well as behavioural movement, data about physical oceanographic conditions are collected using the top predators because of their deep-diving capacity (Lowther et al. 2016).

Global distribution of marine animal bio-logging studies
Among marine mammals, the pinnipeds (seals, sea lions and walruses) are one of the most extensively studied taxa (121 cases in 174 marine mammal studies). These species can be easily captured because of their breeding cycle, during which they haul-out to breed out of the water. Among marine reptiles, the testudinids (sea turtles) are best-studied (64 cases in 71 marine reptile studies). Because many sea turtle species are endangered, conservation and management are the main purpose of bio-logging in this taxa (Hamann et al. 2010; Jang et al. 2018).
Bio-logging of marine invertebrates, such as cephalopods, crustaceans and cnidarians, was found to be scarce (so far 17 publications, which represented only about 3.4% of all studies) (Fig. 2). Soft-bodied eco-sensor tags had been applied for trial attachments to jellyfish (Aurelia aurita), squid (Loligo forbesi), veined squids (Loligo forbesii), and Pacific sea nettles (Chrysaora fuscescens) and these studies presented good examples of estimating swimming movements of invertebrates with vertical and horizontal movement (Mooney et al. 2015; Fannjiang et al. 2019; Flaspohler et al. 2019). Although there has been remarkable progress in bio-logging, bio-logging on invertebrates are relatively poorly represented even though invertebrates are widely and diversely distributed living organisms in the ocean. This could be due to technical difficulties involved in deployment and retrieval. However, if bio-logging becomes applicable to these taxa, we anticipate that it will a tremendous positive impact on both the fishery and conservation sectors.
6 Recent Challenges in Bio-logging Studies
6.1 Satellite Communication Bandwidth
To retrieve the bio-logger after deployment is difficult because one should predict where animals are and catch them. Therefore, many information transmission systems including GSM, Argos and Iridium Satellite Communications are being used in connection with bio-loggers. However, each data transmission system has its own bandwidth and coverage ranges that may restrict the amount of data obtained from bio-loggers. For example, accelerometers can record detailed acceleration signals (300 Hz), but the transmitted data is constrained by the Argos satellite system message size (258 bits, 40 s intervals) (Fedak 2002; Boehme et al. 2009; Nielsen et al. 2018). To resolve such limitations in data transmission, the capacity of networks (Kalra and Chauhan 2014) and the data compression (Fedak 2002; Nuijten et al. 2020) should be enhanced.
7 Location Accuracy
In processing the bio-logging data, it is important for researchers to refer to the precise locations where the data were acquired. Thus, it is important to use high-accuracy devices to locate the animal positions. However, even GPS has errors because the number of satellites for GPS is limited at high latitudes (Januszewski 2016). The Argos CLS system is also reported to present higher error estimates than the expected values (68th percentile) with regard to free-living animals (Nicholls et al. 2007; McKeown et al. 2012). Thus, it is recommended for researchers to be aware of device specifications for research purposes and to consider satellite communication technology in study areas to estimate locations more accurately.
8 Battery Life
Battery life is determined based on a compromise between weight and operation time. Larger and heavier battery sizes may often provide longer battery life expectancy for long-term monitoring use. However, battery size may pose problems with regard to the application to small marine species and it may interfere with the movement of animals. Recent advances in electric battery cells have been applied to bio-logging charging systems to utilise long life span batteries, such as lithium polymer and manganese–silicon lithium batteries (Rutz and Troscianko 2013; Virens and Cree 2018). In addition to battery improvement, a new controlling system with machine learning has been suggested to minimise power costs to extend runtime for video-recording (Korpela et al. 2020).
9 Fluid Dynamical Modelling
When researchers deploy bio-loggers on animals, it is important to reduce fluid resistance, not only for ethical and animal welfare reasons but also for behavioural data reliability and retrieval. Fluid resistance may increase swimming costs and the behaviour patterns of marine mammals can be altered (Cornick et al. 2006; van der Hoop et al. 2014). Previous reports indicate that bio-loggers may negatively affect natural animal behaviour (Hazekamp et al. 2010; Portugal et al. 2018). To decrease the interference that may result from deployment, it is suggested to consider fluid dynamics in the design and to reduce the weight of the devices as much as possible. If researchers use effective hydrodynamic designs, the drag force can be greatly decreased (Wilson and McMahon 2006; Kay et al. 2019). Currently, commercial software, such as ANSYS Fluent® v15.0, is available to perform computer simulations (an example of a curved shaped bio-logger that is designed for marine animals is shown in Fig. 3, and the drag forces were 2.89 MPa*mm2 on the X axis and 17.61 MPa*mm2 on the Z axis when the flow speed was set at 0.05 m/s in water, at 0 °C temperature and 20 MPa pressure). Figure 3 shows the fluid dynamic model of the curved shaped logger (length = 118 mm, width = 75 mm, height = 47 mm, weight = 350 g). In future studies, it is recommended for researchers to take the hydrodynamic design of their loggers into consideration and check the shapes of their loggers, to reduce the negative effects of deployment. In addition to the drag forces exerted by fluids, it would also be a good idea to consider how the loggers stick to the body while the animal is actively moving.

Fluid dynamic model of a curved shape bio-logger that is designed for marine animals
10 Underwater Positioning
GPS is regarded as one the most accurate ways to record location, but it is dependent on radio signals from satellites. Because radio waves reflect off the surface of the water, GPS devices cannot be used to track animals that are underwater, so they are often used in combination with other sensors measuring acceleration or depth for diving birds and mammals that frequently approach the surface. Between the surface GPS points acquired from the satellites, depth records are linearly interpolated to estimate the underwater movement and acceleration data can be used for dead reckoning. However, if the underwater tracking position is available, the underwater animal's movements can be tracked more accurately. Acoustic positioning systems directly track three-dimensional underwater positions but they require buoys, so they are limited to short-range movement studies. Furthermore, acoustic positioning uses ultrasound, which can affect whales that are known to communicate using ultrasound. A recent study developed a new technique to record underwater location using polarised cameras, demonstrating the possibility of underwater tracking (Powell et al. 2018). The mean error is still around 61 km, and the location precision drops significantly when the sun is below 40 degrees. Nevertheless, if further developed for long-range diving with high accuracy, it would be possible to more fully investigate the migration behaviour of marine mammals and fish.
11 Stretchable Skin-like System
Most bio-loggers have limitations when applied to invertebrates due to the weight and shape of the devices, but a stretchable skin-like system (called “Marine skin”) has been recently proposed. This is a net-like film structure including multi-sensors recording temperature, pressure and conductivity, which was developed to improve data logging platforms in terms of flexible design and ultralight weight (< 6 g in dry conditions, < 2.4 g in wet conditions) compared with conventional bio-loggers (Nassar et al. 2018). Because traditional satellites relayed CTD loggers used to track large marine animals, such as cetaceans and pinnipeds, featured large batteries they were not suitable for tagging young specimens or invertebrates and the shape was not animal friendly in terms of the design of the fluid dynamics. In contrast, marine skin has been used to tag a crustacean, the swimming crab (Portunus pelagicus), and has a light weight and bendable shape. Due to the limited film size, however, the temperature sensor in marine skin provides data at a resolution of 0.5 °C (Nassar et al. 2018), which is much lower than that of portable CTD loggers (0.001 °C, an Argos CTD-Satellite Relayed Data Logger at SMRU, http://www.smru.st-andrews.ac.uk/research-technology). In addition, the battery life is limited because the power consumption for high resolution forces increases in the size and weight of the battery (Shaikh et al. 2019). Despite the current technical limitations, it could be effective in collecting information about marine invertebrates as a non-invasive approach.
12 Conclusion and Suggestion for Future Studies
As bio-logging techniques developed, they became an increasingly useful tool to study marine ecology and oceanography. Bio-logging grants us insights into marine animals which are difficult access. However, current bio-logging devices are still under development, with new sensors being added and improvements required for broader satellite communication bandwidth, higher location accuracy, longer battery life, and smaller logger size. Although current studies mainly focus on large mammals and birds, in future studies, soft invertebrates, such as squid and jellyfish, are expected to be amenable to bio-logging with the rapid growth of tagging technology. Marine skin also has strong potential for use in marine species, with its flexible and thin logger shape. Assessing the hydrodynamics of devices using computational fluid dynamics would help device developers to reduce water resistance and improve the welfare of animals.
At present, animal-borne CTD datasets have relatively low precision and high error rates, compared to ship-borne CTD datasets, because of their miniaturised size and residual noise (Roquet et al. 2017). Calibration algorithms to minimise error rates and the lag time between the temperature sensor and salinity sensor data would be necessary to increase their accuracy for evaluating physical ocean environments. Although the issue of precision in animal-borne CTD cannot be easily solved, we expect resolution and accuracy to improve with the progress of technology, and that this will extend access to extreme habitats, including polar oceans, allowing researchers to explore the hidden ocean under the thick ice. This will provide more information to study global issues, such as climate change and sea-level rise, by measuring physical oceanographic conditions.
References
Amlaner CJ, Macdonald DW (1980) A handbook on biotelemetry and radio tracking. Pergamon Press, Oxford, 824 p
Barrionuevo M, Ciancio J, Steinfurth A, Frere E (2020) Geolocation and stable isotopes indicate habitat segregation between sexes in Magellanic penguins during the winter dispersion. J Avian Biol 51(2):e02325. https://doi.org/10.1111/jav.02325
Bengtson JL, Hill R, Hill S (1993) Using satellite telemetry to study the ecology and behavior of Antarctic seals. Kor J Polar Res 4(2):109–115
Biddle L, Swart S (2020) The observed seasonal cycle of submesoscale processes in the Antarctic marginal ice zone. J Geophys Res-Oceans 125:e2019JC015587. https://doi.org/10.1029/2019JC015587
Biuw M, Boehme L, Guinet C, Hindell M, Costa D, Charrassin JB, Roquet F, Bailleul F, Meredith M, Thorpe S, Tremblay Y, Mcdonald B, Park YH, Rintoul SR, Bindoff N, Goebel M, Crocker D, Lovell P, Nicholson J, Monks F, Fedak MA (2007) Variations in behavior and condition of a Southern Ocean top predator in relation to in situ oceanographic conditions. P Natl Acad Sci USA 104:13705–13710. https://doi.org/10.1073/pnas.0701121104
Block BA, Holbrook CM, Simmons SE, Holland KN, Ault JS, Costa DP, Mate BR, Seitz AC, Arendt MD, Payne JC (2016) Toward a national animal telemetry network for aquatic observations in the United States. Anim Biotelemetry 4(1):1–8. https://doi.org/10.1186/s40317-015-0092-1
Boehme L, Lovell P, Biuw M, Roquet F, Nicholson J, Thorpe SE, Meredith MP, Fedak M (2009) Technical Note: Animal-borne CTD-Satellite Relay Data Loggers for real-time oceanographic data collection. Ocean Sci 5(4):685–695. https://doi.org/10.5194/os-5-685-2009
Bost CA, Cotté C, Bailleul F, Cherel Y, Charrassin JB, Guinet C, Ainley DG, Weimerskirch H (2009) The importance of oceanographic fronts to marine birds and mammals of the southern oceans. J Mar Syst 78(3):363–376. https://doi.org/10.1016/j.jmarsys.2008.11.022
Boyd IL, Kato A, Ropert-Coudert Y (2004) Bio-logging science: sensing beyond the boundaries. Mem Natl Inst Polar Res 58:1–14
Bridge ES, Thorup K, Bowlin MS, Chilson PB, Diehl RH, Fleron RW, Hartl P, Kays R, Kelly JF, Robinson WD, Wikelski M (2011) Technology on the move: recent and forthcoming innovations for tracking migratory birds. Bioscience 61(9):689–698. https://doi.org/10.1525/bio.2011.61.9.7
Casey JP, James MC, Williard AS (2014) Behavioral and metabolic contributions to thermoregulation in freely swimming leatherback turtles at high latitudes. J Exp Biol 217(13):2331–2337. https://doi.org/10.1242/jeb.100347
Castellini MA, Kooyman GL, Ponganis PJ (1992) Metabolic rates of freely diving Weddell seals: correlations with oxygen stores, swim velocity and diving duration. J Exp Biol 165(1):181–194
Cazau D, Bonnel J, Jouma’a J, Le Bras Y, Guinet C (2017) Measuring the marine soundscape of the Indian Ocean with southern elephant seals used as acoustic gliders of opportunity. J Atmos Ocean Tech 34(1):207–223. https://doi.org/10.1175/JTECH-D-16-0124.1
Charrassin JB, Hindell M, Rintoul SR, Roquet F, Sokolov S, Biuw M, Costa D, Boehme L, Lovell P, Coleman R, Timmermann R, Meijers A, Meredith M, Park YH, Bailleul F, Goebel M, Tremblay Y, Bost CA, Mcmahon CR, Field IC, Fedak MA, Guinet C (2008) Southern Ocean frontal structure and sea-ice formation rates revealed by elephant seals. P Natl Acad Sci USA 105:11634–11639. https://doi.org/10.1073/pnas.0800790105
Choi N, Kim JH, Kokubun N, Park S, Chung H, Lee WY (2017) Group association and vocal behaviour during foraging trips in Gentoo penguins. Sci Rep 7(1):1–9. https://doi.org/10.1038/s41598-017-07900-7
Cianchetti-Benedetti M, Catoni C, Kato A, Massa B, Quillfeldt P (2017) A new algorithm for the identification of dives reveals the foraging ecology of a shallow-diving seabird using accelerometer data. Mar Biol 164(4):77–87. https://doi.org/10.1007/s00227-017-3106-0
Cooke SJ, Brownscombe JW, Raby GD, Broell F, Hinch SG, Clark TD, Semmens JM (2016) Remote bioenergetics measurements in wild fish: opportunities and challenges. Comp Biochem Phys A 202:23–37. https://doi.org/10.1016/j.cbpa.2016.03.022
Cornick LA, Inglis SD, Willis K, Horning M (2006) Effects of increased swimming costs on foraging behavior and efficiency of captive Steller sea lions: evidence for behavioral plasticity in the recovery phase of dives. J Exp Mar Biol Ecol 333(2):306–314. https://doi.org/10.1016/j.jembe.2006.01.010
Costa DP, Huckstadt LA, Crocker DE, McDonald BI, Goebel ME, Fedak MA (2010a) Approaches to studying climatic change and its role on the habitat selection of Antarctic pinnipeds. Integr Comp Biol 50(6):1018–1030. https://doi.org/10.1093/icb/icq054
Costa DP, Robinson PW, Arnould JPY, Harrison AL, Simmons SE, Hassrick JL, Hoskins AJ, Kirkman SP, Oosthuizen H, Villegas-Amtmann S, Crocker DE (2010b) Accuracy of ARGOS locations of Pinnipeds at-sea estimated using fastloc GPS. PLoS ONE 5(1):e8677. https://doi.org/10.1371/journal.pone.0008677
Cox SL, Orgeret F, Gesta M, Rodde C, Heizer I, Weimerskirch H, Guinet C (2018) Processing of acceleration and dive data on-board satellite relay tags to investigate diving and foraging behaviour in free-ranging marine predators. Method Ecol Evol 9(1):64–77. https://doi.org/10.1111/2041-210X.12845
Croxall JP, Silk JRD, Phillips RA, Afanasyev V, Briggs DR (2005) Global circumnavigations: tracking year-round ranges of nonbreeding albatrosses. Science 307(5707):249–250. https://doi.org/10.1126/science.1106042h
Davis RW, Fuiman LA, Williams TM, Collier SO, Hagey WP, Kanatous SB, Kohin S, Horning M (1999) Hunting behavior of a marine mammal beneath the Antarctic fast ice. Science 283(5404):993–996. https://doi.org/10.1126/science.283.5404.993
del Villar-Guerra D, Cronin M, Dabrowski T, Bartlett D (2012) Seals as collectors of oceanographic data in the coastal zone. Estuar Coast Shelf S 115:272–281. https://doi.org/10.1016/j.ecss.2012.09.010
Delord K, Barbraud C, Pinaud D, Letournel B, Jaugeon B, Goraguer H, Lazure P, Lormee H (2020) Movements of three alcid species breeding sympatrically in Saint Pierre and Miquelon, northwestern Atlantic Ocean. J Ornithol 161(2):359–371. https://doi.org/10.1007/s10336-019-01725-z
Fancy SG, Pank LF, Douglas DC, Curby CH, Garner GW (1988) Satellite telemetry: a new tool for wildlife research and management. Fish and Wildlife Service, Washington, p 172
Fannjiang C, Mooney TA, Cones S, Mann D, Shorter KA, Katija K (2019) Augmenting biologging with supervised machine learning to study in situ behavior of the medusa Chrysaora fuscescens. J Exp Biol 222(16):jeb207654. https://doi.org/10.1242/jeb.207654
Fedak M (2002) Overcoming the constraints of long range radio telemetry from animals: getting more useful data from smaller packages. Integr Comp Biol 42(1):3–10. https://doi.org/10.1093/icb/42.1.3
Flaspohler GE, Caruso F, Mooney TA, Katija K, Fontes J, Afonso P, Shorter KA (2019) Quantifying the swimming gaits of veined squid (Loligo forbesii) using bio-logging tags. J Exp Biol 222(24):jeb198226
Fourati H, Manamanni N, Afilal L, Handrich Y (2011) Posture and body acceleration tracking by inertial and magnetic sensing: application in behavioral analysis of free-ranging animals. Biomed Signal Proces 6(1):94–104. https://doi.org/10.1016/j.bspc.2010.06.004
Fourati H, Manamanni N, Afilal L, Handrich Y (2013) Rigid body motions capturing by means of wearable inertial and magnetic MEMS sensors assembly: from the reconstitution of the posture toward the dead reckoning: an application in Bio-logging. In: Choudhary V, Iniewski K (eds) MEMS: fundamental technology and applications (devices, circuits, and systems), 1st edn. CRC Press, Boca Raton, pp 313–330
Goldbogen JA, Calambokidis J, Friedlaender AS, Francis J, DeRuiter SL, Stimpert AK, Falcone E, Southall BL (2012) Underwater acrobatics by the world’s largest predator: 360° rolling manoeuvres by lunge-feeding blue whales. Biol Lett 9(1):20120986–20120986. https://doi.org/10.1098/rsbl.2012.0986
Goldbogen JA, Cade DE, Calambokidis J, Czapanskiy MF, Fahlbusch J, Friedlaender AS, Gough WT, Kahane-Rapport SR, Savoca MS, Ponganis KV, Ponganis PJ (2019) Extreme bradycardia and tachycardia in the world’s largest animal. Proc Natl Acad Sci USA 116(50):25329–25332. https://doi.org/10.1073/pnas.1914273116
Goulet P, Guinet C, Swift R, Madsen PT, Johnson M (2019) A miniature biomimetic sonar and movement tag to study the biotic environment and predator-prey interactions in aquatic animals. Deep-Sea Res PT I 148:1–11. https://doi.org/10.1016/j.dsr.2019.04.007
Hamann M, Godfrey MH, Seminoff JA, Arthur K, Barata PCR, Bjorndal KA, Bolten AB, Broderick AC, Campbell LM, Carreras C, Casale P, Chaloupka M, Chan SKF, Coyne MS, Crowder LB, Diez CE, Dutton PH, Epperly SP, FitzSimmons NN, Formia A, Girondot M, Hays GC, Cheng IS, Kaska Y, Lewison R, Mortimer JA, Nichols WJ, Reina RD, Shanker K, Spotila JR, Tomás J, Wallace BP, Work TM, Zbinden J, Godley BJ (2010) Global research priorities for sea turtles: informing management and conservation in the 21st century. Endanger Species Res 11(3):245–269. https://doi.org/10.3354/esr00279
Harcourt R, Sequeira AMM, Zhang X, Roquet F, Komatsu K, Heupel M, McMahon C, Whoriskey F, Meekan M, Carroll G, Brodie S, Simpfendorfer C, Hindell M, Jonsen I, Costa DP, Block B, Muelbert M, Woodward B, Weise M, Aarestrup K, Biuw M, Boehme L, Bograd SJ, Cazau D, Charrassin JB, Cooke SJ, Cowley P, de Bruyn PJN, Jeanniard du Dot T, Duarte C, Eguíluz VM, Ferreira LC, Fernández-Gracia J, Goetz K, Goto Y, Guinet C, Hammill M, Hays GC, Hazen EL, Hückstädt LA, Huveneers C, Iverson S, Jaaman SA, Kittiwattanawong K, Kovacs KM, Lydersen C, Moltmann T, Naruoka M, Phillips L, Picard B, Queiroz N, Reverdin G, Sato K, Sims DW, Thorstad EB, Thums M, Treasure AM, Trites AW, Williams GD, Yonehara Y, Fedak MA (2019) Animal-borne telemetry: an integral component of the ocean observing toolkit. Front Mar Sci 6:326. https://doi.org/10.3389/fmars.2019.00326
Hazekamp AAH, Mayer R, Osinga N (2010) Flow simulation along a seal: the impact of an external device. Eur J Wildlife Res 56(2):131–140. https://doi.org/10.1007/s10344-009-0293-0
Heaslip SG, Iverson SJ, Bowen WD, James MC (2012) Jellyfish support high energy intake of Leatherback sea turtles (Dermochelys coriacea): video evidence from animal-borne cameras. PLoS ONE 7(3):e33259. https://doi.org/10.1371/journal.pone.0033259
Hernandez SM, Loyd KAT, Newton AN, Carswell BL, Abernathy KJ (2018) The use of point-of-view cameras (Kittycams) to quantify predation by colony cats (Felis catus) on wildlife. Wildlife Res 45(4):357–365. https://doi.org/10.1071/Wr17155
Heylen BC, Nachtsheim DA (2018) Bio-telemetry as an essential tool in movement ecology and marine conservation. In: Jungblut S, Liebich V, Bode M (eds) YOUMARES 8-oceans across boundaries learning from each other. Springer International Publishing, Cham, pp 83–107. https://doi.org/10.1007/978-3-319-93284-2_7
Hindell MA, Reisinger RR, Ropert-Coudert Y, Hückstädt LA, Trathan PN, Bornemann H, Charrassin JB, Chown SL, Costa DP, Danis B, Lea MA, Thompson D, Torres LG, van de Putte AP, Alderman R, Andrews-Goff V, Arthur B, Ballard G, Bengtson J, Bester MN, Blix AS, Boehme L, Bost CA, Boveng P, Cleeland J, Constantine R, Corney S, Crawford RJM, Dalla Rosa L, de Bruyn PJN, Delord K, Descamps S, Double M, Emmerson L, Fedak M, Friedlaender A, Gales N, Goebel ME, Goetz KT, Guinet C, Goldsworthy SD, Harcourt R, Hinke JT, Jerosch K, Kato A, Kerry KR, Kirkwood R, Kooyman GL, Kovacs KM, Lawton K, Lowther AD, Lydersen C, Lyver POB, Makhado AB, Márquez MEI, McDonald BI, McMahon CR, Muelbert M, Nachtsheim D, Nicholls KW, Nordøy ES, Olmastroni S, Phillips RA, Pistorius P, Plötz J, Pütz K, Ratcliffe N, Ryan PG, Santos M, Southwell C, Staniland I, Takahashi A, Tarroux A, Trivelpiece W, Wakefield E, Weimerskirch H, Wienecke B, Xavier JC, Wotherspoon S, Jonsen ID, Raymond B (2020) Tracking of marine predators to protect Southern Ocean ecosystems. Nature 580(7801):87–92. https://doi.org/10.1038/s41586-020-2126-y
Holm-Hansen O, Lorenzen CJ, Holmes RW, Strickland JD (1965) Fluorometric determination of chlorophyll. ICES J Mar Sci 30(1):3–15
Hussey NE, Kessel ST, Aarestrup K, Cooke SJ, Cowley PD, Fisk AT, Harcourt RG, Holland KN, Iverson SJ, Kocik JF (2015) Aquatic animal telemetry: a panoramic window into the underwater world. Science 348(6240):1255642. https://doi.org/10.1126/science.1255642
Irvine LM, Winsor MH, Follett TM, Mate BR, Palacios DM (2020) An at-sea assessment of Argos location accuracy for three species of large whales, and the effect of deep-diving behavior on location error. Anim Biotelemetry 8(1):20. https://doi.org/10.1186/s40317-020-00207-x
Jang S, Balazs GH, Parker DM, Kim BY, Kim MY, Ng CKY, Kim TW (2018) Movements of green turtles (Chelonia mydas) rescued from pound nets near Jeju Island, Republic of Korea. Chelonian Conserv BI 17(2):236. https://doi.org/10.2744/CCB-1279.1
Januszewski J (2016) Global satellite navigation systems at high latitudes, visibility and geometry. Annu Navig 23(1):89–102. https://doi.org/10.1515/aon-2016-0006
Jewell OJD, Gleiss AC, Jorgensen SJ, Andrzejaczek S, Moxley JH, Beatty SJ, Wikelski M, Block BA, Chapple TK (2019) Cryptic habitat use of white sharks in kelp forest revealed by animal-borne video. Biol Lett 15(4):20190085. https://doi.org/10.1098/rsbl.2019.0085
Jones TT, Van Houtan KS, Bostrom BL, Ostafichuk P, Mikkelsen J, Tezcan E, Carey M, Imlach B, Seminoff JA (2013) Calculating the ecological impacts of animal-borne instruments on aquatic organisms. Method Ecol Evol 4(12):1178. https://doi.org/10.1111/2041-210X.12109
Kalra B, Chauhan D (2014) A comparative study of mobile wireless communication network: 1G to 5G. Int J Comput Sci Inf Tech Res 2(3):430–433
Kay WP, Naumann DS, Bowen HJ, Withers SJ, Evans BJ, Wilson RP, Stringell TB, Bull JC, Hopkins PW, Börger L (2019) Minimizing the impact of biologging devices: using computational fluid dynamics for optimizing tag design and positioning. Method Ecol Evol 10(8):1222–1233. https://doi.org/10.1111/2041-210X.13216
Kays R, Crofoot MC, Jetz W, Wikelski M (2015) Terrestrial animal tracking as an eye on life and planet. Science 348(6240):aaa2478. https://doi.org/10.1126/science.aaa2478
Keates TR, Kudela RM, Holser RR, Hückstädt LA, Simmons SE, Costa DP (2020) Chlorophyll fluorescence as measured in situ by animal-borne instruments in the northeastern Pacific Ocean. J Mar Syst 203:103265. https://doi.org/10.1016/j.jmarsys.2019.103265
Klimley AP, Le Boeuf BJ, Cantara KM, Richert JE, Davis SF, Van Sommeran S (2001) Radio acoustic positioning as a tool for studying site-specific behavior of the white shark and other large marine species. Mar Biol 138(2):429–446. https://doi.org/10.1007/s002270000394
Knudsen VO, Wilson JV, Anderson NS (1948) The attenuation of audible sound in fog and smoke. J Acoust Soc Am 20(6):849–857
Kooyman GL (1965) Techniques used in measuring diving capacities of Weddell seals. Polar Rec 12(79):391–394
Kooyman GL, Ponganis PJ (1998) The physiological basis of diving to depth: birds and mammals. Annu Rev Physiol 60(1):19–32. https://doi.org/10.1146/annurev.physiol.60.1.19
Kooyman GL, Drabek C, Elsner R, Campbell W (1971) Diving behavior of the emperor penguin, Aptenodytes forsteri. Auk 88(4):775–795. https://doi.org/10.2307/4083837
Kooyman GL, Gentry RL, Urguhart DL (1976) Northern fur seal diving behavior: a new approach to its study. Science 193(4251):411–412. https://doi.org/10.1126/science.935876
Kooyman GL, Ponganis PJ, Castellini M, Ponganis E, Ponganis K, Thorson P, Eckert S, LeMaho Y (1992) Heart rates and swim speeds of emperor penguins diving under sea ice. J Exp Biol 165(1):161–180
Korpela J, Suzuki H, Matsumoto S, Mizutani Y, Samejima M, Maekawa T, Nakai J, Yoda K (2020) Machine learning enables improved runtime and precision for bio-loggers on seabirds. Commun Biolog 3(1):633. https://doi.org/10.1038/s42003-020-01356-8
Lander ME, Lindstrom T, Rutishauser M, Franzheim A, Holland M (2015) Development and field testing a satellite-linked fluorometer for marine vertebrates. Anim Biotelemetry 3(1):1–11. https://doi.org/10.1186/s40317-015-0070-7
Lawson G, Hückstädt L, Lavery A, Jaffre F, Wiebe P, Fincke J, Crocker D, Costa D (2015) Development of an animal-borne “sonar tag” for quantifying prey availability: test deployments on northern elephant seals. Anim Biotelemetry 3:22. https://doi.org/10.1186/s40317-015-0054-7
Lévy M, Franks PJS, Smith KS (2018) The role of submesoscale currents in structuring marine ecosystems. Nat Commun 9(1):4758. https://doi.org/10.1038/s41467-018-07059-3
Lisovski S, Hewson CM, Klaassen RHG, Korner-Nievergelt F, Kristensen MW, Hahn S (2012) Geolocation by light: accuracy and precision affected by environmental factors. Method Ecol Evol 3(3):603–612. https://doi.org/10.1111/j.2041-210X.2012.00185.x
Lowther AD, Lydersen C, Kovacs KM (2016) The seasonal evolution of shelf water masses around Bouvetøya, a sub-Antarctic island in the mid-Atlantic sector of the Southern Ocean, determined from an instrumented southern elephant seal. Polar Res 35(1):28278. https://doi.org/10.3402/polar.v35.28278
Lyamin OI, Mukhametov LM, Siegel JM (2017) Sleep in the northern fur seal. Curr Opin Neurol 44:144–151. https://doi.org/10.1016/j.conb.2017.04.009
Mallett HKW, Boehme L, Fedak M, Heywood KJ, Stevens DP, Roquet F (2018) Variation in the distribution and properties of circumpolar deep water in the Eastern Amundsen Sea, on seasonal timescales, using Seal-Borne tags. Geophys Res Lett 45(10):4982–4990. https://doi.org/10.1029/2018gl077430
March D, Boehme L, Tintoré J, Vélez-Belchi PJ, Godley BJ (2020) Towards the integration of animal-borne instruments into global ocean observing systems. Global Change Biol 26(2):586–596. https://doi.org/10.1111/gcb.14902
Marshall GJ (1998) CRITTERCAM: An animal-borne imaging and data logging system. Mar Technol Soc J 32(1):11–17
Marshall GJ, Bakhtiari M, Shepard M, Tweedy I, Rasch D, Abernathy K, Joliff B, Carrier JC, Heithaus MR (2007) An advanced solid-state animal-borne video and environmental data-logging device (“Crittercam”) for marine research. Mar Technol Soc J 41(2):31–38. https://doi.org/10.4031/002533207787442240
Mascetti GG (2016) Unihemispheric sleep and asymmetrical sleep: behavioral, neurophysiological, and functional perspectives. Nat Sci Sleep 8:221–238. https://doi.org/10.2147/NSS.S71970
Mate BR (2012) Implementation of acoustic dosimeters with recoverable month-long GPS/TDR tags to interpret controlled-exposure experiments for large whales. In: Popper AN, Hawkins A (eds) The effects of noise on aquatic life. Springer, New York. https://doi.org/10.1007/978-1-4419-7311-5_45
McGillicuddy DJ, Robinson AR (1997) Eddy-induced nutrient supply and new production in the Sargasso Sea. Deep-Sea Res PT I 44(8):1427–1450. https://doi.org/10.1016/S0967-0637(97)00024-1
McKeown A, Westcott DA (2012) Assessing the accuracy of small satellite transmitters on free-living flying-foxes. Austral Ecol 37(3):295–301
McMahon CR, Autret E, Houghton JDR, Lovell P, Myers AE, Hays GC (2005) Animal-borne sensors successfully capture the real-time thermal properties of ocean basins. Limnol Oceanogr-Meth 3(9):392–398. https://doi.org/10.4319/lom.2005.3.392
Miyamoto Y, Sakai T, Furusawa M, Naito Y (2004) Development of high-frequency micro echo sounder. Fish Sci 70(3):381–388. https://doi.org/10.1111/j.1444-2906.2004.00817.x
Moll RJ, Millspaugh JJ, Beringer J, Sartwell J, He Z (2007) A new ‘view’of ecology and conservation through animal-borne video systems. Trends Ecol Evol 22(12):660–668. https://doi.org/10.1016/j.tree.2007.09.007
Mooney TA, Katija K, Shorter KA, Hurst T, Fontes J, Afonso P (2015) ITAG: an eco-sensor for fine-scale behavioral measurements of soft-bodied marine invertebrates. Anim Biotelemetry 3(1):31. https://doi.org/10.1186/s40317-015-0076-1
Naito Y (2004) New steps in bio-logging science. Mem Natl Inst Polar Res 58:50–57
Naito Y, Le Boeuf BJ, Asaga T, Huntley AC (1989) Long-term records of an adult female northern elephant seal. Antarct Rec 33:1–9
Naito Y, Sakamoto W, Uchida I, Kureha K, Ebisawa T (1990) Estimation of migration route of the loggerhead turtle caretta-caretta around the nesting ground. Nippon Suisan Gakk 56(2):255–262
Nassar JM, Khan SM, Velling SJ, Diaz-Gaxiola A, Shaikh SF, Geraldi NR, Sevilla GAT, Duarte CM, Hussain MM (2018) Compliant lightweight non-invasive standalone “Marine Skin” tagging system. NPJ Flex Electron 2(1):1–9. https://doi.org/10.1038/s41528-018-0025-1
Newman L, Heil P, Trebilco R, Katsumata K, Constable A, van Wijk E, Assmann K, Beja J, Bricher P, Coleman R, Costa D, Diggs S, Farneti R, Fawcett S, Gille ST, Hendry KR, Henley S, Hofmann E, Maksym T, Mazloff M, Meijers A, Meredith MM, Moreau S, Ozsoy B, Robertson R, Schloss I, Schofield O, Shi J, Sikes E, Smith IJ, Swart S, Wahlin A, Williams G, Williams MJM, Herraiz-Borreguero L, Kern S, Lieser J, Massom RA, Melbourne-Thomas J, Miloslavich P, Spreen G (2019) Delivering sustained, coordinated, and integrated observations of the southern ocean for global impact. Front Mar Sci 6:433. https://doi.org/10.3389/fmars.2019.00433
Nicholls DG, Robertson CJR, Murray MD (2007) Measuring accuracy and precision for CLS: Argos satellite telemetry locations. Notornis 54(3):137–157
Nielsen JK, Rose CS, Loher T, Drobny P, Seitz AC, Courtney MB, Gauvin J (2018) Characterizing activity and assessing bycatch survival of Pacific halibut with accelerometer Pop-up Satellite Archival Tags. Anim Biotelemetry 6(1):10. https://doi.org/10.1186/s40317-018-0154-2
Nuijten RJM, Gerrits T, Shamoun-Baranes J, Nolet BA (2020) Less is more: on-board lossy compression of accelerometer data increases biologging capacity. J Anim Ecol 89(1):237–247. https://doi.org/10.1111/1365-2656.13164
Ohshima KI, Fukamachi Y, Williams GD, Nihashi S, Roquet F, Kitade Y, Tamura T, Hirano D, Herraiz-Borreguero L, Field I, Hindell M, Aoki S, Wakatsuchi M (2013) Antarctic Bottom Water production by intense sea-ice formation in the Cape Darnley polynya. Nat Geosci 6:235–240. https://doi.org/10.1038/ngeo1738
Parrish FA, Craig MP, Ragen TJ, Marshall GJ, Buhleier BM (2000) Identifying diurnal foraging habitat of endangered Hawaiian monk seals using a seal-mounted video camera. Mar Mammal Sci 16(2):392–412. https://doi.org/10.1111/j.1748-7692.2000.tb00932.x
Phillips RA, Silk JRD, Croxall JP, Afanasyev V, Briggs DR (2004) Accuracy of geolocation estimates for flying seabirds. Mar Ecol-Prog Ser 266:265–272. https://doi.org/10.3354/meps266265
Portugal SJ, White CR, Börger L (2018) Miniaturization of biologgers is not alleviating the 5% rule. Method Ecol Evol 9(7):1662–1666. https://doi.org/10.1111/2041-210x.13013
Powell SB, Garnett R, Marshall J, Rizk C, Gruev V (2018) Bioinspired polarization vision enables underwater geolocalization. Sci Adv 4(4):eaao6841. https://doi.org/10.1126/sciadv.aao6841
Rattenborg NC, Lima SL, Amlaner CJ (1999) Facultative control of avian unihemispheric sleep under the risk of predation. Behav Brain Res 105(2):163–172. https://doi.org/10.1016/s0166-4328(99)00070-4
Rattenborg NC, Voirin B, Cruz SM, Tisdale R, Dell’Omo G, Lipp HP, Wikelski M, Vyssotski AL (2016) Evidence that birds sleep in mid-flight. Nat Commun 7:12468. https://doi.org/10.1038/ncomms12468
Robinson PW, Costa DP, Crocker DE, Gallo-Reynoso JP, Champagne CD, Fowler MA, Goetsch C, Goetz KT, Hassrick JL, Hückstädt LA (2012) Foraging behavior and success of a mesopelagic predator in the northeast Pacific Ocean: insights from a data-rich species, the northern elephant seal. PLoS ONE 7(5):e36728. https://doi.org/10.1371/journal.pone.0036728
Rodgers AR, Rempel RS, Abraham KF (1996) A GPS-based telemetry system. Wildl Soc Bull 24(3):559–566
Ropert-Coudert Y, Rory PW (2005) Trends and perspectives in animal-attached remote sensing. Front Ecol Environ 3(8):437–444. https://doi.org/10.1890/1540-9295(2005)003[0437:TAPIAR]2.0.CO;2
Roquet F, Charrassin JB, Marchand S, Boehme L, Fedak M, Reverdin G, Guinet C (2011) Delayed-mode calibration of hydrographic data obtained from animal-borne satellite relay data loggers. J Atmos Ocean Tech 28(6):787–801. https://doi.org/10.1175/2010jtecho801.1
Roquet F, Wunsch C, Forget G, Heimbach P, Guinet C, Reverdin G, Charrassin JB, Bailleul F, Costa DP, Huckstadt LA, Goetz KT, Kovacs KM, Lydersen C, Biuw M, Nøst OA, Bornemann H, Ploetz J, Bester MN, McIntyre T, Muelbert MC, Hindell MA, McMahon CR, Williams G, Harcourt R, Field IC, Chafik L, Nicholls KW, Boehme L, Fedak MA (2013) Estimates of the Southern Ocean general circulation improved by animal-borne instruments: seals sample the Southern Ocean. Geophys Res Lett 40(23):6176–6180. https://doi.org/10.1002/2013GL058304
Roquet F, Boehme L, Block B, Charrassin JB, Costa D, Guinet C, Harcourt RG, Hindell MA, Hückstädt LA, McMahon CR, Woodward B, Fedak MA (2017) Ocean observations using tagged animals. Oceanography 30(2):139
Rutz C, Hays GC (2009) New frontiers in biologging science. Biol Lett 5:289–292. https://doi.org/10.1098/rsbl.2009.0089
Rutz C, Troscianko J (2013) Programmable, miniature video-loggers for deployment on wild birds and other wildlife. Method Ecol Evol 4(2):114–122. https://doi.org/10.1111/2041-210x.12003
Semmens JM, Kock AA, Watanabe YY, Shepard CM, Berkenpas E, Stehfest KM, Barnett A, Payne NL (2019) Preparing to launch: biologging reveals the dynamics of white shark breaching behaviour. Mar Biol 166(7):95. https://doi.org/10.1007/s00227-019-3542-0
Shaffer SA, Tremblay Y, Weimerskirch H, Scott D, Thompson DR, Sagar PM, Moller H, Taylor GA, Foley DG, Block BA, Costa DP (2006) Migratory shearwaters integrate oceanic resources across the Pacific Ocean in an endless summer. P Natl Acad Sci USA 103(34):12799–12802. https://doi.org/10.1073/pnas.0603715103
Shaikh SF, Mazo-Mantilla HF, Qaiser N, Khan SM, Nassar JM, Geraldi NR, Duarte CM, Hussain MM (2019) Noninvasive featherlight wearable compliant “marine skin”: standalone multisensory system for deep-sea environmental monitoring. Small 15(10):1804385. https://doi.org/10.1002/smll.201804385
Shepard ELC, Wilson RP, Quintana F, Gómez Laich A, Liebsch N, Albareda DA, Halsey LG, Gleiss A, Morgan DT, Myers AE, Newman C, Macdonald DW (2008) Identification of animal movement patterns using tri-axial accelerometry. Endanger Species Res 10:47–60. https://doi.org/10.3354/esr00084
Shiomi K, Sato K, Mitamura H, Arai N, Naito Y, Ponganis PJ (2008) Effect of ocean current on the dead-reckoning estimation of 3-D dive paths of emperor penguins. Aquat Biol 3:265–270. https://doi.org/10.3354/ab00087
Siegelman L, O’toole M, Flexas M, Rivière P, Klein P (2019) Submesoscale ocean fronts act as biological hotspot for southern elephant seal. Sci Rep 9:1–13. https://doi.org/10.1038/s41598-019-42117-w
Silvano A, Rintoul SR, Peña-Molino B, Hobbs WR, van Wijk E, Aoki S, Tamura T, Williams GD (2018) Freshening by glacial meltwater enhances melting of ice shelves and reduces formation of Antarctic Bottom Water. Sci Adv 4:eaap9467. https://doi.org/10.1126/sciadv.aap9467
Staniland IJ, Ratcliffe N, Trathan PN, Forcada J (2018) Long term movements and activity patterns of an Antarctic marine apex predator: the leopard seal. PLoS ONE 13:e0197767. https://doi.org/10.1371/journal.pone.0197767
Stehfest KM, Carter CG, McAllister JD, Ross JD, Semmens JM (2017) Response of Atlantic salmon Salmo salar to temperature and dissolved oxygen extremes established using animal-borne environmental sensors. Sci Rep 7(1):1–10. https://doi.org/10.1038/s41598-017-04806-2
Teo SLH, Boustany A, Blackwell S, Walli A, Weng KC, Block BA (2004) Validation of geolocation estimates based on light level and sea surface temperature from electronic tags. Mar Ecol-Prog Ser 283:81–98. https://doi.org/10.3354/meps283081
Tomkiewicz SM, Fuller MR, Kie JG, Bates KK (2010) Global positioning system and associated technologies in animal behaviour and ecological research. Philos T R Soc B 365(1550):2163–2176. https://doi.org/10.1098/rstb.2010.0090
Treasure AM, Roquet F, Ansorge IJ, Bester MN, Boehme L, Bornemann H, Charrassin JB, Chevallier D, Costa DP, Fedak MA, Guinet C, Hammill MO, Harcourt RG, Hindell MA, Kovacs KM, Lea MA, Lovell P, Lowther AD, Lydersen C, McIntyre T, McMahon CR, Muelbert MMC, Nicholls K, Picard B, Reverdin G, Trites AW, Williams GD, Nico De Bruyn PJ (2017) Marine mammals exploring the oceans pole to pole: a review of the MEOP Consortium. Oceanography 30(2):132–138. https://doi.org/10.5670/oceanog.2017.234
Tremblay Y, Thiebault A, Mullers R, Pistorius P (2014) Bird-borne video-cameras show that seabird movement patterns relate to previously unrevealed proximate environment, not prey. PLoS ONE 9(2):e88424. https://doi.org/10.1371/journal.pone.0088424
Van der Hoop JM, Fahlman A, Hurst T, Rocho-Levine J, Shorter KA, Petrov V, Moore MJ (2014) Bottlenose dolphins modify behavior to reduce metabolic effect of tag attachment. J Exp Biol 217(23):4229–4236. https://doi.org/10.1242/jeb.108225
Virens J, Cree A (2018) Further miniaturisation of the Thermochron iButton to create a thermal bio-logger weighing 0.3 g. J Exp Biol 221(11):jeb176354. https://doi.org/10.1242/jeb.176354
Viviant M, Trites AW, Rosen DAS, Monestiez P, Guinet C (2010) Prey capture attempts can be detected in Steller sea lions and other marine predators using accelerometers. Polar Biol 33(5):713–719. https://doi.org/10.1007/s00300-009-0750-y
Voegeli FA, Smale MJ, Webber DM, Andrade Y, O’Dor RK (2001) Ultrasonic telemetry, tracking and automated monitoring technologyfor sharks. Environ Biol Fish 60(1/3):267–282. https://doi.org/10.1023/a:1007682304720
Ware C, Trites AW, Rosen DA, Potvin J (2016) Averaged propulsive body acceleration (APBA) can be calculated from biologging tags that incorporate gyroscopes and accelerometers to estimate swimming speed, hydrodynamic drag and energy expenditure for Steller sea lions. PLoS ONE 11(6):e0157326. https://doi.org/10.1371/journal.pone.0157326
Watanabe Y, Takahashi A (2013) Linking animal-borne video to accelerometers reveals prey capture variability. Proc Natl Acad Sci USA 110(6):2199–2204. https://doi.org/10.1073/pnas.1216244110
Welschmeyer NA (1994) Fluorometric analysis of chlorophyll a in the presence of chlorophyll b and pheopigments. Limnol Oceanogr 39(8):1985–1992
Wenz GM (1962) Acoustic ambient noise in the ocean: spectra and sources. J Acoust Soc Am 34(12):1936–1956
Whitford M, Klimley AP (2019) An overview of behavioral, physiological, and environmental sensors used in animal biotelemetry and biologging studies. Anim Biotelemetry 7(1):1–24. https://doi.org/10.1186/s40317-019-0189-z
Wilmers CC, Nickel B, Bryce CM, Smith JA, Wheat RE, Yovovich V (2015) The golden age of bio-logging: how animal-borne sensors are advancing the frontiers of ecology. Ecol Lett 96(7):1741–1753. https://doi.org/10.1890/14-1401.1
Wilson RP, McMahon CR (2006) Measuring devices on wild animals: what constitutes acceptable practice? Front Ecol Environ 4(3):147–154. https://doi.org/10.1890/1540-9295(2006)004[0147:MDOWAW]2.0.CO;2
Yoda K, Naito Y, Sato K, Takahashi A, Nishikawa J, Ropert-Coudert Y, Kurita M, Le Maho Y (2001) A new technique for monitoring the behaviour of free-ranging Adélie penguins. J Exp Biol 204(4):685–690
Acknowledgements
This work was supported by the Korea Polar Research institute under Grant PE20110 and PN19130; and the National Research Foundation of Korea (NRF) grant funded by the Korea government (MSIT) under Grant 2019M1A5A1102275.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Chung, H., Lee, J. & Lee, W.Y. A Review: Marine Bio-logging of Animal Behaviour and Ocean Environments. Ocean Sci. J. 56, 117–131 (2021). https://doi.org/10.1007/s12601-021-00015-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12601-021-00015-1