
Abstract
Global Navigation Satellite Systems (GNSSs) have greatly developed over the last decade, so that, in addition to GPS and GLONASS, we have seen the emergence of the European Galileo and the Chinese BeiDou systems. There are presently a sufficient number of satellites in each GNSS constellation for single-system positioning purposes. Satellite visibility and single point positioning (SPP) are two basic evaluation tools in the field of GNSS data analysis. We have assessed the performance of the currently available GNSS constellations in terms of satellite visibility and SPP with the single-system approach. Visibility analysis results show that with 5- and 10-degree elevation mask angles, GPS-only, GLONASS-only, Galileo-only, and BeiDou-3-only medium earth orbit satellites in view have more limited availability in middle latitudes than in polar areas. Hybrid constellations including BeiDou-2 and combined BeiDou-2/3 exhibit a dominant longitudinal and latitudinal visibility pattern over the Asia-Pacific region. Ionosphere Free (IF) linear combination of code observations and precise orbits and clocks were used in SPP analysis. SPP results show that the horizontal and vertical RMSE values for Galileo-only case are more stable and are lower compared to the GPS-only, GLONASS-only, and BeiDou-only (BDS-2 and BDS-3) cases. Also, BeiDou performance has been significantly improved after middle of the 2020.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Global Navigation Satellite System (GNSS) is an infrastructure for positioning, navigation, and timing (PNT) applications. Presently, the GNSS family consists of four members, including US’s GPS, Russia’s GLONASS, Europe’s Galileo, and China’s BeiDou. As the first navigation satellite system, GPS has been studied extensively by researchers. The GLONASS was entirely restored on December 2011, and is in full operational capability (FOC) status with 24 satellites in orbits (Revnivykh et al. 2017). The Galileo development program was planned in three phases with first and second phases completed by launching two Galileo In-Orbit Validation Element (GIOVE) satellites in 2005 and 2008, and four In-Orbit Validation (IOV) satellites in 2011 and 2012 (Falcone et al. 2017). At present Galileo is completing its third phase (FOC) with 22 active satellites in orbits (excluding E14+E18). BeiDou navigation satellite system (BDS) has been initiated and developed by China. The BDS construction and development was planned in a three-step process. The BeiDou demonstration system (BDS-1) was established in 2000 and provided services to China mainland. By end of 2012, the BeiDou regional system (BDS-2) was complete covering the Asia-Pacific region (Yang et al. 2017). In the third step, the BeiDou global system (BDS-3) was built-up and completed on June 23, 2020 (https://www.igs.org/mgex).
Single Point Positioning (SPP) has been broadly used with the GPS constellation for positioning and navigation purposes since the advent of the GPS (Cai et al. 2016). Initially, pseudorange-based point positioning was limited to dozens of meters, but with the modernization of GPS and the appearance of new navigation systems positioning accuracy has improved, and a new concept called multi-GNSS SPP has emerged. The performance of multi-GNSS absolute positioning has been analyzed with different constellation combinations, including GPS + GLONASS (Angrisano et al. 2013), GPS + BeiDou (Cai et al. 2014), GPS + GLONASS + BeiDou (Abdi et al. 2017), GPS + GLONASS + Galileo + BeiDou (Pan et al. 2019). Although these investigations dealt with various combinations, they attempted to improve positioning accuracy and precision due to increased numbers of visible satellites in the sky. There has been little research about Galileo-only positioning because of the limited number of Galileo satellites (Hadas et al. 2019). Also, the regional structure of BeiDou-2 has restricted its positioning coverage over the Asia-Pacific region. The adequate number of Galileo satellites and recent deployment of BeiDou-3 satellites allow us to carry out single constellation point positioning with currently available GNSS constellations.
The main objective of this study is to evaluate the performance of pseudorange-based dual-frequency single point positioning using a single constellation approach, emphasizing the Galileo and BeiDou-3 satellite navigation systems. In addition, an analysis of satellite visibility was conducted on a global scale for each GNSS.
Galileo and BeiDou: a brief overview
The huge benefit of satellite based navigation systems for the public prompted the European Space Agency (ESA) to develop a European GNSS named Galileo. The space segment of Galileo, similar to GLONASS, consists of three orbital planes. Each orbital plane should nominally be filled up by eight active satellites in near circular orbits. On 21 October 2011, the first twin satellites of the present Galileo constellation were launched, and the second twin satellites were deployed a year later. With these satellites, the Galileo in-orbit validation (IOV) phase was implemented. The FOC phase was started by sending the first pair of its satellites (PRN: E14 and E18) on August 2014, while they were deployed in an incorrect orbit. During March 2015 and May 2016, eight more FOC satellites were launched, with two satellites were carried by a Soyuz launcher in each mission. The use of the Ariane 5 launch vehicle accelerated Galileo’s development process, in a way that each rocket carried four satellites during the next three lunch mission (https://www.gsc-europa.eu).
GSAT0104 and GSAT0204, i.e. E20 and E22, are out of service. The former only transmits a single frequency signal, and the latter has been removed from active service for constellation management purposes. Consequently, the existing Galileo constellation includes two testing satellites in an incorrect orbit, two unavailable satellites, and 22 properly operating satellites (Fig. 1).

Snapshot of Galileo (Enn) and BeiDou-3 (Cnn) constellations on April 20, 2020. Satellites with white color are out-of-service. Only MEO satellites of BDS-3 are shown for simplicity and comparison
Galileo satellites transmit several signals on four different frequency bands within the 1.2–1.6 GHz electromagnetic spectrum, namely: E1, E5a, E5b, and E6, centered at, 1575.42 MHz, 1176.45 MHz, 1207.14 MHz, and 1278.75 MHz respectively. The Galileo E1 and E5a signal frequencies match the GPS L1 and L5 frequencies respectively, and both constellations provide suitable conditions for interoperability (Hofmann-Wellenhof et al. 2007).
About eight years have passed since the initial service of BDS-2. During this period, the BDS-2 has been investigated in many aspects, including measurement quality (Montenbruck et al. 2013), positioning performance (Cai et al. 2014), and satellite visibility (Yang et al. 2014). In contrast, BDS-3 has been less considered due to its later emergence.
As of May 2021, the BDS space segment includes a total of 45 satellites, i.e., five GEO, seven IGSO, and three MEO for BDS-2, and three GEO, three IGSO, and 24 MEO for BDS-3 system. BDS-3 satellites were manufactured by the China Academy of Space Technology (CAST) and Shanghai Engineering Center for Microsatellites (SECM). Information of 30 spacecraft of BDS-3 is shown in Table 1; also, the snapshot of all of BDS-3 MEO satellites is illustrated in Fig. 1.
The BDS-3 satellites have not only a hybrid constellation configuration but also a distinctive communication feature named inter-satellite link (ISL). ISLs allow ranging measurement and data communication with other satellites and ground equipments. ISL observations are used for orbit determination purposes, and they are an essential part of broadcast ephemeris generation (Lv et al. 2020).
The BDS-2 satellites transmit three frequency bands consisting of B1I, B2b, and B3I, centered at 1561.098 MHz, 1207.140 MHz, and 1268.520 MHz respectively. The BDS-3 satellites provide not only BDS-2 frequencies but also three new frequencies. These new frequency bands are B1C, B2a, and B2a+b, centered at 1575.420 MHz, 1176.450 MHz, and 1191.795 MHz, and overlapped with L1/E1, L5/E5a, and E5a+b respectively. The BeiDou Open Service (OS) signals are B1I, B3I, B1C, and B2a at the present time (CSNO 2018).
Satellite visibility analysis
We investigated satellite visibility on a global scale. Satellite visibility analysis computation can be performed by real or simulated ephemeris (Wang et al. 2019). We used precise ephemeris for this purpose. According to the purpose of this research, six different constellation configurations were examined, including GPS-only, GLONASS-only, Galileo-only, BeiDou-2-only, BeiDou-3-only, and combined BeiDou-2 and BeiDou-3. The precise ephemeris which was provided by Wuhan university (WHU) analysis center was used, and every satellite position was extracted on an hourly basis during June 30, 2019. The surface of the earth was divided into 1°× 1° grid cells, and for center of each cell (φi,λj)
we calculated the elevation of satellites considering the following assumptions:
-
1.
There were no obstacles along the line of sight.
-
2.
The altitude of earth surface was assumed to be zero.
-
3.
Five and ten degree cutoff elevation angles were applied.
Therefore, for each epoch the number of visible satellites was computed. It allows us to obtain the global average of visible satellites during the experiment day.
Figure 2 shows the average number of visible satellites on a global scale with elevation mask of five degrees for different constellations. The average number of visible GPS satellites was in the range of 9–10 at middle latitudes while it increased to 11 over the equatorial region and the polar areas. For GLONASS, at least 8 satellites were visible around the polar regions and part of the equator. This number decreased to 7 for other areas. In the case of Galileo, for areas over 15 to 60° both in the Northern Hemisphere and in the Southern Hemisphere, at least 7 satellites were visible, while this number increased to 8 in other areas. With regard to BeiDou-3-only, 6 satellites could be tracked at the equator and over polar areas, whereas the equivalent number was 5 for other regions. Incorporating GEO and IGSO satellites with MEO satellites inside a GNSS constellation can clearly change visibility areas. The GEO satellites cover a broad area in the east-west direction, but IGSO satellites cover an extensive region in the north-south direction. During the test session, the GEO and IGSO satellites were not yet in BeiDou-3, and we did not see the effect of them over BeiDou-3 visibility, whereas this was clear in the BeiDou-2 system. The average number of visible BeiDou-2 satellites was in the range of 8 to 13 over areas spanning 60° S to 60° N and 40° E to 180° E, and this number was in the range of 1–7 in other areas. BeiDou-2 mostly covered areas over Southeast Asia and Northwest Australia. Combining BeiDou-2 and BeiDou-3 added about 5–6 to the satellites in view compared to BeiDou-2-only case.

Average number of visible satellites for GPS (GPS:32), GLONASS (GLO:24), Galileo (GAL:22), BeiDou-2 (BD2:15), BeiDou-3 (BD3:18), and combined BeiDou-2 and BeiDou-3 (BDS:33) with a 5° mask angle for June 30, 2019. The numbers in parentheses indicate the number of active satellites on the experiment day
Figure 3 shows the average number of visible satellites for elevation angles above 10 degrees. In the case of GPS, the average number of visible satellites was 8–9 over mid-latitudes and increased to 10 for the equatorial and polar areas. At least 6 and 8 GLONASS satellites were visible for 60° S–60° N and poles, respectively. As for Galileo, 6 satellites could be tracked in areas spanning of 15°–60° S and 15°–60° N, while 7 satellites were in view for other locations. For BeiDou-3, at least 6 satellites were visible in the poles, whereas this number decreased to 5 in other areas. As for BeiDou-2-only and combined BeiDou-2/3 the average number of visible satellites over the Asia-Pacific was 8–13 and 14–20, respectively.

Average number of visible satellites for GPS (GPS:32), GLONASS (GLO:24), Galileo (GAL:22), BeiDou-2 (BD2:15), BeiDou-3 (BD3:18), and combined BeiDou-2 and BeiDou-3 (BDS:33) with a 10° mask angle for June 30, 2019. The numbers in parentheses indicate the number of active satellites on the experiment day
In addition, the following results were obtained from visibility analysis:
-
1.
The number of visible satellites decreases when the elevation mask angle increases.
-
2.
For each GNSS fewer MEO satellites are visible over mid-latitudes than other locations.
-
3.
GEO and IGSO satellites increase latitudinal and longitudinal visibility over the service area.
Single point positioning analysis
In this section, we briefly introduce the positioning model, namely, the Single Point Positioning. We also provide details on the processing strategy and the accuracy evaluation with emphasis on single constellation approach. The undifferenced and uncombined functional model for pseudorange observations between the receiver and the satellite can be written as follows:
where the subscripts r and j indicate the receiver and frequency: the superscript s identifies a satellite; \(p_{r,j}^{s}\) is observed pseudorange in j th frequency in units of meters; \({\rho _{r}^{s}}\) is geometric range between position of satellite antenna phase center at time of signal transmission (xs,ys,zs) and position of receiver antenna phase center at time of signal reception (xr,yr,zr) in units of meters; dtr and dts are receiver and satellite clock biases in units of seconds, respectively; c demotes the speed of light in vacuum in units of meters/second; \({T_{r}^{s}}\) denotes the slant tropospheric delay in units of meters; \(I_{r,j}^{s}\) is the ionospheric delay on j th frequency in units of meters; dr,j and \({d_{j}^{s}}\) are receiver and satellite code biases in units of seconds, respectively; ep is pseudorange observation noise and other unmodelled errors.
First order ionospheric delay which has a large contribution in the total delay, can be eliminated by linear combination of observations at two different frequencies. The ionospheric-free (IF) linear combination for pseudorange observations on two frequencies, named, f1 and f2, can be expressed as follows:
Signal biases or instrumental delays in (2) are divided into receiver-dependent (dr,j) and satellite-dependent \(({d_{j}^{s}})\) components. These delays are caused by imperfect synchronization of different signals. With a simple assumption that signal bias of all signals tracked by the same receiver are equal then dr,j will be absorbed in receiver clock bias. However, the satellite-dependent component should be corrected when different signals (or combination of signals) from reference signals are used for positioning and timing applications. The reference signals (or combination of signals) are used to generate satellite clock corrections for broadcast and precise ephemeris (Guo et al. 2015). By using precise orbit and clock products in conjunction with IF combination of reference signal, 3 can be simplified as follows:
where \(c\tilde {dt}_{r} = cdt_{r} + cd_{r,IF}\).
The coordinate system of precise orbit and clock products provided by IGS is the same for all constellations, but one should consider the offsets among GNSS time scales. These biases are known as inter-system biases (ISBs) and it should be estimated as an unknown parameter in multi-constellation processing sessions (Dalla Torre and Caporali 2015). By selecting GPS Time (GPST) as the reference time-scale and applying precise orbit and clock corrections, the observation model in (4) can be written as follows for each GNSS:
where letters G, R, E, and C denote the GPS, GLONASS, Galileo, and BeiDou systems respectively.
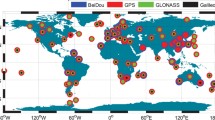
Table 2 shows details of our data processing strategy. We used multi-GNSS observations from 50 IGS-MGEX stations distributed worldwide (Montenbruck et al. 2017). Observations were recorded during March 14, 2020, and were mostly stored in RINEX version 3.04 file format (IGS 2018). These stations can track the GPS, GLONASS, Galileo BeiDou-2, and BeiDou-3 signals at least on two frequencies for each navigation system. The precise position of selected stations are provided by IGS Analysis Centers (ACs), which were used to evaluate the positioning performance. We selected GPS L1/L2, GLONASS L1/L2 (G1/G2), Galileo E1/E5a, and BeiDou B1/B3 signals, and we used IF linear combinations of them for positioning purposes. The sampling rate and elevation mask were set at 30 seconds and 7 degrees, respectively. The precise orbit and clock products generated by Wuhan university analysis center were used. These products include GPS, GLONASS, Galileo, and combined BeiDou 2 and 3 orbit and clock correction. During the test sessions, Wuhan university was the first analysis center to provide precise orbit and clock products for BDS-3 MEO spacecraft, and these products were released just for 18 BDS-3 MEO satellites, i.e., C19–C30 and C32–C37. The tropospheric delay was corrected by the Saastamoinen delay model, and the Niell Mapping Function (NMF) was used to apply delay in observation equations (Saastamoinen 1972; Niell 1996).
In the positioning analysis, unknown parameters were estimated by epoch-wise least squares adjustment. The position of satellites in precise orbit and clock products are referred to the satellite Center of Mass (CoM). Therefore, one should apply the satellite phase center offset (PCO) correction. The root-mean-square (RMS) as a statistical parameter was used to assess the performance of positioning.
Experimental results
The positioning performance of different constellations, i.e., GPS-only (G), GLONASS-only (R), Galileo-only (E), BeiDou-2-only (C2), BeiDou-3-only (C3), and combined BeiDou-2 + BeiDou-3 (C) were assessed with a 24-hour processing session. Considering the collection of 50 stations acquired from MGEX network, a total of 300 sets of results were obtained to analyze the positioning performance for each navigation system.
As an example, the multi-GNSS station YARR which is located in Australia was selected for detailed analysis because it is located inside the focal part of the BeiDou-2 service area. The data set of YARR were processed in six different cases from 00:00 to 23:59 on March 14, 2020 (GPS week number: 20966). Figure 4 illustrates the horizontal and the vertical positioning errors based on six processing configurations for YARR monument. From the graphs it can be observed that the Galileo-only case provides more stable and accurate solutions compared with other systems. The combination of BDS-2 and BDS-3 improve the precision of positioning compared to BDS-2 or BDS-3. Moreover, the performance of GLONASS-only solutions is more unstable than any other cases, especially for the vertical component. Table 3 provides RMS statistics for positioning errors in East, North, and Up components; as well as the three-dimension values of RMS are shown.

Horizontal positioning errors (scatter) and vertical positioning errors (time series) for YARR station. The letters G, R, E, C, C2, and C3 indicate GPS, GLONASS, Galileo, combined BDS-2 and BDS-3, BDS-2, and BDS-3, respectively
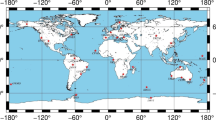
Figures 5 and 6 illustrate the horizontal and vertical RMS (HRMS and VRMS) error of 50 MGEX stations, respectively. These results were obtained from code based point positioning for each navigation system. The accuracy of Galileo-only SPP is at sub decimeter level for horizontal component, and its performance is superior to the other cases in both horizontal and vertical directions. HRMS and VRMS errors for GLONASS-only solutions are not as uniform as GPS or Galileo, and it can be due to low precision of GLONASS pseudoranges and poor geometry of GLONASS satellites over some spots. A similar conclusion can be extracted from the results of combined BDS-2/3 over outside the Asia-Pacific region. The BDS-2 and integrated BDS-2/3 positioning performance over the Asia-Pacific region are comparable with that of GPS-only due to presence of GEO and IGSO satellites in the BDS-2 constellation.

Horizontal RMS of selected MGEX stations for GPS-only, GLONASS-only (GLO), Galileo-only (GAL), and combined BeiDou-2/3 (BDS) constellations

Vertical RMS of selected MGEX stations for GPS-only, GLONASS-only (GLO), Galileo-only (GAL), and combined BeiDou-2/3 (BDS) constellations.
Figure 4 shows a clear bias both in horizontal and vertical components for BDS-2 solution. The bias in horizontal component shows a direction dependent behavior. Also, the similar characteristics were observed in the CEDU, POL2, and USUD stations (Fig. 7). As shown in Fig. 7, the best fitting line for each scatter plot extending to a focal zone, which is the central part of the BDS-2 service area. The direction dependent bias is possibly due to the latitudinal and the longitudinal distributions of GEO and IGSO satellites in BDS-2 constellation and needs more in-depth assessment.

Horizontal positioning errors for CEDU, POL2, and USUD stations for BDS-2 solution, and their location map
Table 4 shows minimum and maximum values of HRMS and VRMS errors which are obtained for different processing cases. The horizontal positioning RMSE are 0.71–2.03 m, 1.03–5.94 m, 0.32–1.33 m, and 0.91–4.30 m for GPS-only, GLONASS-only, Galileo-only, and BeiDou-only, respectively. Furthermore, the vertical positioning RMSE are 1.57–4.90 m, 1.65–8.73 m, 0.60–4.60 m, and 1.27–6.32 m for GPS-only, GLONASS-only, Galileo-only, and BeiDou-only, respectively. Large values of RMSE shown in this table are observed for GLONASS, Galileo, and BDS-3 on some stations like CEDU and NKLG. It can be caused by unmodelled error sources such as multipath effect and limited number of visible GLONASS/Galileo/BeiDou-3 satellites compared to GPS.
BeiDou constellation at the middle of the 2021
BeiDou passed a unique development procedure from a regional to a global constellation. Meanwhile, BeiDou-3 was completed with a remarkable speed at the middle of the 2020. The satellite visibility and SPP analyses in previous sections are for a time when the BeiDou-3 was in development status. In order to show the accelerated growth as well as the enhanced performance of the completed system, a new analysis (satellite visibility and SPP) was conducted for the BeiDou constellation on May 1, 2021.
Figure 8 shows the average number of visible satellites on a global scale with elevation mask of 10 degrees for the combined BeiDou-2 and BeiDou-3 constellations. Due to the GEO and IGSO satellites, 20 to 26 BDS satellites can be observed in the Asia-Pacific region. For other areas, the number of visible satellites is 10 to 20. But, in the Western mid-latitudes only 7 to 10 BDS satellites are visible at the same time. Comparing to Fig. 3, the minimum and maximum number of visible satellites are increased by 75% and 30%, respectively.

Average number of visible satellites for the combined BeiDou-2 and BeiDou-3 (BDS2:15+BDS3:29) with a 10° mask angle on May 01, 2021. The numbers in parentheses indicate the number of active satellites on the experiment day (Note: PRN C61 was in testing status)
Figure 9 shows horizontal and vertical RMS error of 50 MGEX stations for combined BeiDou-2/3 solution. The data processing strategy is summarized in Table 2. The minimum and maximum horizontal positioning RMSE obtained are 1.03 m and 2.95 m, respectively. Corresponding values for vertical positioning RMSE are 1.85 m and 3.90 m. Comparing to Figs. 5 and 6 and Table 4, the worst case HRMS and VRMS errors are decreased by 31.4% and 38.3%, respectively. This result indicates a significant improvement in positioning performance of BDS, which accurately reflects the growth of the system over time.

Horizontal and Vertical RMS of 50 MGEX stations for combined BeiDou-2/3 (BDS) solution on May 01, 2021
Conclusions
We assessed the satellite visibility and SPP performance of available GNSS constellations using actual data. In this study, the main objective was evaluation of positioning accuracy in single-system mode specially Galileo and BDS-3 systems. The main results and conclusions are summarized as follows:
-
1.
For any GNSS with MEO satellites, the number of visible satellites over polar regions is more than over mid-latitudes.
-
2.
Galileo-only and GPS-only SPP performance are better than those of GLONASS and BDS-3 single-system.
-
3.
Galileo with 22 active satellites in its constellation compared to GPS with 32 satellites shows similar or superior SPP performance.
-
4.
Integrating BDS-3 with BDS-2 improves positioning accuracy not only over the Asia-Pacific region but also outside the BDS-2 service area.
-
5.
Launching the 30th BDS-3 satellite was completed the whole BeiDou program on June 23, 2020; Afterward, positioning performance analysis show considerable improvement compared to previous times.
Finally, with the fully operational capability of Galileo constellation, there will be a large number of satellites in the GNSS family, which will improve PNT solutions not only with the single-GNSS formation but also with the multi-GNSS configuration.
References
Abdi N, Ardalan A A, Karimi R, Rezvani M H (2017) Performance assessment of multi-gnss real-time ppp over iran. Adv Space Res 59(12):2870–2879
Angrisano A, Gaglione S, Gioia C (2013) Performance assessment of gps/glonass single point positioning in an urban environment. Acta Geodaetica Geophys 48(2):149–161
Cai C, Gao Y, Pan L, Dai W (2014) An analysis on combined gps/compass data quality and its effect on single point positioning accuracy under different observing conditions. Adv Space Res 54(5):818–829
Cai C, He C, Santerre R, Pan L, Cui X, Zhu J (2016) A comparative analysis of measurement noise and multipath for four constellations: gps, beidou, glonass and galileo. Surv Rev 48(349):287–295
CSNO (2018) Beidou navigation satellite system open service performance standard (version 2.0)
Dalla Torre A, Caporali A (2015) An analysis of intersystem biases for multi-gnss positioning. GPS Solution 19(2):297–307
Falcone M, Hahn J, Burger T (2017) Galileo. In: Teunissen PJ, Montenbruck O (eds) Springer Handbook of Global Navigation Satellite Systems. Springer International Publishing, Cham
Guo F, Zhang X, Wang J (2015) Timing group delay and differential code bias corrections for beidou positioning. J Geodesy 89(5):427–445
Hadas T, Kazmierski K, Sośnica K (2019) Performance of galileo-only dual-frequency absolute positioning using the fully serviceable galileo constellation. GPS Solution 23(4):108
Hofmann-Wellenhof B, Lichtenegger H, Wasle E (2007) GNSS–Global navigation satellite systems: GPS. GLONASS, Galileo, and more. Springer Science & Business Media
IGS (2018) Rinex—the receiver independent exchange format, version 3.04
Lv Y, Geng T, Zhao Q, Xie X, Zhou R (2020) Initial assessment of bds-3 preliminary system signal-in-space range error. GPS Solution 24(1):16
Montenbruck O, Hauschild A, Steigenberger P, Hugentobler U, Teunissen P, Nakamura S (2013) Initial assessment of the compass/beidou-2 regional navigation satellite system. GPS Solution 17(2):211–222
Montenbruck O, Steigenberger P, Prange L, Deng Z, Zhao Q, Perosanz F, Romero I, Noll C, Stürze A, Weber G, Schmid R, MacLeod K, Schaer S (2017) The multi-gnss experiment (mgex) of the international gnss service (igs) – achievements, prospects and challenges. Adv Space Res 59(7):1671x–1697
Niell A E (1996) Global mapping functions for the atmosphere delay at radio wavelengths. J Geophys Res: Solid Earth 101(B2):3227–3246
Pan L, Zhang X, Li X, Li X, Lu C, Liu J, Wang Q (2019) Satellite availability and point positioning accuracy evaluation on a global scale for integration of gps, glonass, beidou and galileo. Adv Space Res 63(9):2696–2710
Revnivykh S, Bolkunov A, Serdyukov A, Montenbruck O (2017) Glonass. In: Teunissen PJ, Montenbruck O (eds) Springer Handbook of Global Navigation Satellite Systems. Springer International Publishing, Cham
Saastamoinen J (1972) Contributions to the theory of atmospheric refraction. Bullet Géodésiq 105(1):279–298
Wang M, Wang J, Dong D, Meng L, Chen J, Wang A, Cui H (2019) Performance of bds-3: satellite visibility and dilution of precision. GPS Solution 23(2):56
Yang Y, Li J, Wang A, Xu J, He H, Guo H, Shen J, Dai X (2014) Preliminary assessment of the navigation and positioning performance of beidou regional navigation satellite system. Sci China Earth Sci 57(1):144–152
Yang Y, Tang J, Montenbruck O (2017) Chinese navigation satellite systems. In: Teunissen PJ, Montenbruck O (eds) Springer Handbook of Global Navigation Satellite Systems. Springer International Publishing, Cham
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Data availability
The data used in this work, including stations observation and precise ephemeris are publicly available at CDDIS data center (https://cddis.nasa.gov/).
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Karimi, H. An analysis of satellite visibility and single point positioning with GPS, GLONASS, Galileo, and BeiDou-2/3. Appl Geomat 13, 781–791 (2021). https://doi.org/10.1007/s12518-021-00391-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12518-021-00391-2