
Abstract
Computer VR technology has been widely used in landscape design. This paper analyzes the auxiliary use mode and detail optimization process of this technology in landscape design, and gives the comparative experiment of indoor and outdoor landscape design. Firstly, landscape design planning and design based on VR technology; secondly, the detailed optimization process of the combination of VR and VR-GIS is analyzed; finally, aiming at the problem of poor energy-saving effect of traditional methods, the energy-saving optimization design of data acquisition system is carried out. The data collector in the data acquisition system uses the method of contrast image of visual image to collect data, so it consumes a lot of power in the process of using. Therefore, the data collector and control power system are optimized, which can effectively reduce the energy consumption. In the process of virtual image establishment, edge correlation operator is used to calculate correlation, so as to achieve low power consumption. On this basis, the auxiliary use and detail optimization in landscape design are given by using Lumion virtual reality (VR) platform. The experimental results show that the visual modeling error of this method is stable between 1 and 3%, the error is small and the stability is good; the average rendering time of batch objects is about 8.9 s, which is an efficient auxiliary use and detail optimization method for VR landscape design.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Landscape planning and design based on virtual reality assistant technology
In order to promote the organic combination of virtual reality (VR) technology and planning and design, so as to enhance the intuitiveness and authenticity of designers in space vision, so as to better carry out computer-aided scene design, this paper proposes to realize the digital design application of planning through VR technology. CAD, or computer-aided design and drafting (CADD), is a design and technical documentation technology that automates manual drafting. The CAD is used in computers (or workstations) to help create, modify, analyze and optimize a concept. CAD software is used to enhance the designer’s efficiency, boost design consistency, improve interactions through documenting, and construct a production database. It is used in various patent applications to defend goods and technologies. CAD production is often printed, machined by other manufacturers in the form of electronic files. Firstly, the advantages of VR technology aided planning and design are briefly analyzed; secondly, the VR modeling language tool (VRML) (Li et al. 2018) used in VR technology aided design is introduced; finally, starting from the actual case, the overall structure of the project, the specific design process and the programming method are given by combining the drawing of CAD drawings and 3D character modeling. Finally, the VR scene is constructed by SKETCHUP and VR software, which enables users to observe and experience the virtual environment freely through human-computer interaction, which effectively promotes the innovative development of planning and design (Liu and Zhu 2020).
The VR technology is used to implement the digital design application of planning in landscape design. The VR technology is used in various kinds of applications such as education, sports, and medical training. Further, the combination of optimization process such as VR and VR-GIS is analyzed in order to tackle the poor energy saving effect in traditional methods. Also, the energy consumption is reduced with the help of optimized control power system and data collector. In addition to that, Lumion software is used to reduce visual modeling error between 1 and 3% with time of about 8.9 s.
Overall design of the system
In this paper, VRML is used to describe the 3D scene with text information. Transmission over the Internet, the VRML browser interprets and generates three-dimensional scenes on the local computer, and interprets the generated Standard Specification, namely VRML specification (Liu 2020). The virtual reality modeling language (VRML) is the type of programming language used to construct web-based models and 3-D models with illusion and texture. The access mode of VRML is based on C/S mode, in which the server provides VRML files. VRML provides 6 + 1 degrees of freedom, namely three directions of movement and rotation, as well as hyperlinks with other 3D spaces. The general framework of VRML application is shown in Fig. 1, in that the input data is inserted into the VRML editor to convert it into VRML to get a compatible view. Then, the VRML is processed in VRML file to define interactive 3D objects, also the WRL file is included in the VRML file to provide accurate details of 3D objects such as edges, vertices, mapped textures, and surface colors. Further, the purpose of a web server is to view website content to users by storing, processing, and distributing webpages.

General framework of VRML application
The overall system structure of “a city landscape planning and design” is shown in Fig. 2, which is mainly divided into CAD drawing, 3D model building, scene integration, and system interaction.

Overall structure of the system
A CAD drawing is a comprehensive 2D or 3D diagram of an engineering or architecture project’s components. Computer-aided design employs algorithms to generate sketches that are used in the design process, from creative design to installation or assembly. The CAD drawing is used to display the 2d or 3d components of architecture or engineering project. It also uses software to generate drawings of the whole project or design. Then, the 3D modeling is used to create a mathematical representation of 3-dimensional objects and systems. Further, the scene integration is used for scene importing and object importing in VRML. Finally, the roaming and the BGM are done by system interaction in the landscape planning and design project.
VRML node and class definition of 3D objects
In the process of VRML design, all the basic elements can be regarded as various types of nodes in the scene. The node hierarchy of VRML for the experimental design of “a city landscape planning and design” is shown in Fig. 3. After each node generates the corresponding objects in VRML, these various objects form a hierarchical structure, which is called scene construction. The ability to visualize and depict spatially cohesive scenes is referred to as scene construction. When visualizing and explaining imaginary scenes, memory-impaired patients made few comparisons to space in two experiments. The VRML design process of virtual 3D scene is the process of placing 3D objects in a virtual space. In this system, the definition of 3D object class is as follows:

Node hierarchy in VRML

Among them, it includes drawing function, initialization function, and basic message processing function, multi object event message processing slot and 3D object basic information.
VR scene optimization based on LOD level of detail algorithm
Complex terrain grid structure often appears in VR scene of. Therefore, in order to draw real-time terrain, LOD level detail algorithm (Ma and Xia 2017) is selected and Quad Tree grid structure is adopted. LOD means the “Level of Detail”. It is used to making minimal detailed version of models and reduces the computer’s workload, allowing it to draw more pixels at a faster frame rate.
The QuadTree grid structure is nothing but a data tree structure, with four children exactly. Quadtrees are two-dimensional analogs that are usually divided into four quadrants or regions to divide a two-dimensional space. The initial grid structure is an undivided square with an edge length of 2n and each side length of 2n + 1 pixel. In order to meet the optimization requirements of VR scene, it is necessary to estimate the roughness of mesh in order to balance the elimination of cracks and refresh rate. Let the roughness be DHmax if it satisfies the following conditions:
Then, the mesh will continue to split, otherwise it will not be divided, and C2 represents an adjustment threshold. In the principle of human vision, the light travels across the cornea and the crystalline focus lies only over its retina. Likewise, the pictures in front of the eyes are reversed (only at the focus plane above the eye), as in a film frame, around the retina. In addition, according to the principle of human vision, the distance L is defined as the distance from the eye to the center of the grid, and D is the edge length of the target grid. If the following conditions are met:
The mesh will continue to be divided. Otherwise, it is not necessary to continue to divide. C1 represents a threshold that can be adjusted according to the actual rendering situation. Combining formula (1) and formula (2), we can get the following results:
When two adjacent meshes are divided in different times, it is necessary to determine the conditions for eliminating triangular cracks
Where d2 is the nearest distance from the horizontal vertical intersection of the viewpoint to the secondary grid. In this way, the triangle crack will not appear on the right side. The distance between the viewpoint and the secondary grid is calculated as follows:
Detail optimization of VR and VR-GIS
VR technology and VR-GIS theory are the basic tools for building 3D visual model. In order to better establish the relationship between the two, and ensure the establishment of digital landscape model, this paper analyzes from the following aspects.
VR and VR-GIS for landscape reconstruction image rendering
In order to ensure the overall stability of VR environment, this paper implements it by image-based and model-based methods. Based on the image method, firstly, the panorama is used to scan the whole landscape in horizontal space and longitude and latitude space, and then seamless connection and texture mapping technology (Atwa et al. 2019) are applied to complete the line of sight arbitrary switching within the space range, and then realize the three-dimensional reconstruction of the landscape image. By using texture mapping technology, it is possible to produce simulation of real-time perspective of real world areas by any object surface. It is used to define high frequency details such as color information and surface texture of a 3D model. The model-based method is to establish the corresponding virtual environment according to the physical location of the landscape. After rendering by 3dstudio and other modeling tools, the unified data format is used to output the landscape reconstruction map (Li et al. 2020). VR-GIS theory emphasizes the combination of visual simulation ability and three-dimensional spatial data analysis. In order to ensure the smooth implementation of the theory, firstly, the landscape image is obtained through overlay remote sensing, and then the VR development of the reconstructed image is completed by using the toolkit of Silicon Graphics GL graphics library. Finally, the landscape reconstruction image is drawn through Microsoft DirectX tool. In virtual reality, the Microsoft DirectX tool is used to test the functionality of sound- or video-related hardware problems. The main function of DirectX tool is to diagnose hardware problems.
Complete the combination of VR and VR-GIS
The combination of VR and VR-GIS theory generally needs to go through three stages: data integration, function integration and function integration (Wang 2019). Firstly, VR⁃GIS, as the management platform of background data, provides the communication channel between VR and landscape information. The VR and Geographical information system (GIS) are incorporated and having some big data applications like VR mobile devices. Also, the applications involved in the VR and GIS has increased dramatically because of heavy rendering computation in VR and geometrical computation in GIS. Through the interactive ability of VR system, the overall landscape distribution is comprehensively analyzed, and different landscape positions are reflected in the VR environment to complete the landscape reconstruction image rendering.
Data integration
The data integration is the process, which is used to associate the data into single from different sources. Data aggregation is a collection of technological and business processes for combining data from various sources and turning it into useful information.
Function integration
The functional integration is nothing but the process of collection of results.
The detailed optimization diagram of the specific combination is shown in Fig. 4.

Detail optimization of VR and VR-GIS
Use VR⁃GIS to complete the digital modeling of landscape reconstruction
The generation of landscape reconstruction panorama, the reconstruction of landscape panorama, takes full range photography of the whole landscape from the normal effective angle of view or the residual light angle of both eyes. Generally, in order to ensure the authenticity of the reconstructed panorama, three forms of spherical surface, cylindrical surface and cubic surface are used to express different landscapes. In the comprehensive consideration of the digital model designed in this paper, the cylindrical panorama is used to represent the landscape in the following process (Pan and Hamilton 2018). This paper uses CAD to generate landscape reconstruction panorama, and the operation steps are shown in Fig. 5. In this process, the digital camera captures the interior landscape and the ordinary optimal camera is used to capture the interior views. Further, the image captured by digital camera is taken as an input image and the image captured by the ordinary camera is taken for photo scanning, then both images are processed in the software to open two fisheye images and the panorama adjustments are taken place. Finally, the images are split for preview in landscape reconstruction.

Process of landscape reconstruction panorama generated by CAD
Landscape 3D terrain modeling based on VR-GIS theory
The construction of landscape 3D terrain model can be summarized as information digitization and DEM generation (Southall et al. 2019). In the process of information digitization, VR⁃GIS is used to input data and edit the entered data (Menin et al. 2018). Digital elevation model (DEM) is a way to store data in numerical form. A DEM is used to represent elevation data of terrain in 3D computer graphics. Cell-based digital elevation models are the most often used digital data for determining the shape of the Earth’s surface (DEMs). In this, the information is used as input to calculate the properties of the ground surface. It is used to extract terrain parameters and to produce relief maps. The indoor area is divided into grids with the same shape and size by spatial coordinates (x, y, z). The column number of the fixed matrix is used to represent the geographical location of the indoor landscape. The different gray values of the matrix elements indicate the specific types of the corresponding landscape.
Realization of digital model of landscape reconstruction based on VR-GIS theory
Through the previous section, we can get the three-dimensional terrain model and the reconstruction panorama of the landscape. Let t and s represent these two variables, respectively
Where a0, a1, …, a8 can be solved by VR-GIS theory. That is, f(t, s) is the established digital model of landscape reconstruction.
Energy saving design of data acquisition system and virtual image system
Energy saving design of data acquisition system
Energy saving calculation of data collector
This section establishes the hardware equipment of data acquisition system of landscape VR technology, which is mainly composed of data acquisition sensor, digital controller, image scanner, data storage system, power control system, etc. The software part of landscape VR technology includes TPM image analysis and data conversion system. The Jacobean determinant is applied to this matrix when it is square, that is, when the function takes the same number of variables as the number of vector components in its output. The energy-saving calculation of connection conversion between modules is as follows:
Where,
- Fx(a, b, c):
-
are parallax pixel functions;
- Gy(a, b, c):
-
are matching filtering functions of image module.
According to the data collected by the data acquisition sensor, combined with the TPM image, after conversion, the joint data pre-processing can be obtained, as follows:
Where,
- Rc:
-
the edge contour is feature of target imaging;
- \( {a}_i^{-p} \):
-
is the smooth gray feature of landscape image;
- R:
-
is the local error loss.
The VR image of landscape is divided into n non-overlapping modules. Combined with TPM image (Rong 2018), the energy storage value of Ω in the 3D projection center area of the image is obtained by analyzing and scanning the image, and the energy error deviation of imaging target detection is defined. The energy-saving calculation formula of the data collector is as follows:
Where,
- na:
-
is the structural heat transfer coefficient of the data collector;
- \( {b}_x^2+{c}_y^2 \):
-
is the process vector of the target point using 3D imaging method.
Energy saving design of power system
Power system is the most important part of energy-saving optimization in the hardware equipment of landscape VR technology data acquisition system. As the energy supply of the whole system, when using the contrast image method, the energy consumption calculation of the power system is as follows (Berg and Vance 2017):
Where,
- i = 1, 2, …, T:
-
is the time series of system operation;
- (Zi)p:
-
is the power consumption of imaging system (Atwa et al. 2019).
In order to reduce the loss of energy consumption when electric energy is converted into unnecessary heat energy, it is necessary to optimize the accuracy of energy calculation
Where,
- xk and XPN:
-
represent the distribution coordinate system of VR Landscape respectively;
- IL:
-
represents the actual power consumption of power system.
Energy saving design of virtual image system
Energy saving calculation of imaging system
On the basis of optimizing the energy consumption of the data acquisition system, the energy-saving design of the virtual image system is carried out. According to the virtual imaging reconstruction, the image 3D database (Sleipness and George 2017) is constructed. The landscape image elevation and elevation diffusion weight coefficient of VR need to take absolute values, which are expressed as follows:
Where,
- w = (wx, wy):
-
the driving smooth is coordinate of imaging system;
- Hx and Hy:
-
are the virtual imaging energy loss compensation x and y energy weight.
The central moment of the edge correlation of the imaging system is optimized as follows
Where,
- ax, by and cz:
-
represent the energy consumption value of the three-dimensional coordinates in the energy loss compensation of imaging system through the calculation of energy weight.
Therefore, the final results of energy-saving calculation of 3D image system are as follows:
Where,
- U:
-
is a N × N matrix in the strong energy consumption area;
- jn0:
-
is the total energy consumption of the imaging system.
Through the aforementioned process, the energy saving process of imaging system is completed.
Energy saving design of image computing system
In the process of virtual image establishment, the edge association operator will be used for correlation calculation, and the whole process is very complicated (Lei et al. 2017). Therefore, it is necessary to simplify the calculation, so as to achieve the purpose of energy saving. Firstly, the control parameters of virtual imaging database should be set as follows:
where the four parameters of A1, B2, C3, D4 represent the upper limit value, lower limit value, uplink transmission value and forward value of the virtual imaging database, respectively. To simplify the calculation, it is necessary to reedit the image calculation system program. Lumion software is used for the image calculation system and the c language is used for editing process. The Lumion software is one of the fastest software to create 3D model or scene; it takes only a minute to create a scene. The editing process uses C language (Mengots 2016), and the editing program is as follows:

Auxiliary use and detail optimization of VR landscape design based on Lumion
Figure 6 describes the design process of VR Landscape Simulation Based on Lumion. It can be seen from Fig. 1 that CAD, Photoshop and other design software provide corresponding auxiliary design functions in the process of using Lumion software to design VR Landscape (George et al. 2017). Collection of landscape data to be modeled, import of 3D landscape model, detailed processing of VR scene simulation, and visualization rendering of VR landscape are the key steps of design. The key step of collecting landscape data to be modeled is field investigation and survey. The digital line drawing and linear map of landscape can be obtained by GIS remote sensing image technology and aerial orthophoto Image. The digital line drawing and line map of landscape are processed and optimized by CAD software. According to the results, 3DSMAX software is used to construct the 3D landscape model, which provides a reference for the design of realistic and vivid VR landscape Favorable conditions. The main body of material processing is the material library, which is mainly obtained by adjusting the texture of landscape by Photoshop design software, and the later landscape output rendering will also be applied to the texture processing results (Zhou et al. 2016). The data storage, rendering and display of landscape design can be completed with the help of relevant programs. The VR landscape designed by Lumion software has the advantages of high fidelity, comprehensive material types, easy to use and high post rendering efficiency. Based on these advantages, the VR landscape designed by Lumion software has strong expressive force and excellent visual impact effect. Lumion software is an architectural software. It is versatile, simple, fun-to-use, effective visualisation application that allows everyone to construct a 3D world, generate stunning pictures, videos and live walks. It is the quickest way for you to pick up your 3D model in just minutes and create a scene.

Design flow of VR landscape simulation based on Lumion
The design flow of VR landscape simulation based on Lumion is shown in Fig. 6. First, the landscape data collection on site is taken as an input and the data is processed in two different areas such as Digital line drawing and line drawing and also in landscape element after generating digital line drawing; it is processed in CAD software for further enhancement but the landscape element is processed in Photoshop software along with CAD software to generate 3D landscape modelling. Secondly, the virtual reality scene simulation details are processed in terms of material handling and to add background. Finally, the virtual rendering of virtual reality landscape is designed using Lumion.
According to the aforementioned process, the VR landscape design auxiliary use is carried out. Lumion software itself cannot build landscape model, so use 3DSMAX to complete the landscape model construction, and import the completed landscape model into Lumion software. Point, line, surface and body are the main elements to describe the structure of VR landscape. This principle can be obtained by judging the attributes of the landscape.
Irregular triangular network model is used to create visualization effect for the imported landscape model. The density of landscape terrain points can truly describe the details of the landscape. The model is good at building 3D visualization model with complicated structure (Gao et al. 2019). Therefore, irregular tin model is the first choice for Lumion to construct 3D visualization model. After the design of 3D visualization model of landscape is completed, the details of landscape design should be processed to show the rich, vivid and visual VR landscape simulation design effect
Material treatment
The material processing of VR landscape design can be completed through the Edit button in Lumion software. Click the material Edit button to get the dialog box, and execute the material processing operation according to the prompt steps. This process involves material object selection, color editing and so on. After selecting the appropriate material settings, click the assign button to take effect.
Add background
After the material processing of the landscape scene is completed, add the scenery for the scene. On the basis of the above scenes, from the perspective of color and spatial layout, add scenery for the landscape. The color matching follows the rule of light and deep, and the layout of space objects needs to start from the overall scene and reasonably match (Stone et al. 2018). Lumion software is rich in background design materials, integrating sound, nature, characters and other elements, in line with the users personalized design standards. In addition, special scenery can be obtained by importing SKETCHUP. Therefore, the background function of Lumion software can meet the needs of high standard users.
Visual rendering of VR landscape
The last step of landscape simulation design is rendering and output. Lumion software adopts script rendering. Script rendering can not only achieve individual rendering, but also achieve batch landscape rendering (Johnson-Glenberg 2019). The rendering of a single object in the scene can be achieved by clicking the render channel command, and the batch rendering can be completed by clicking the render all channel instructions. There are two ways to execute the instruction of rendering script: because the code of this script is not comprehensive, you need to move the rendering script to a toolbar first, and then click the parse button in the add script instruction, but note that you can't modify the script file. If the script is modified, the installation structure of Lumion software will be damaged (Büttner et al. 2017). To create a new script, select the Batch processing instructions can realize landscape rendering. Because the rendering script in the command menu does not have the ability to require interactivity, the objects to be rendered in the scene need to be described with specific parameters. After the VR landscape rendering is completed, the design files can be output. First, the finished design works are stored; secondly, the resolution, image quality, format and other options of landscape drawing are set in the storage interface; finally, the output instructions are selected.
Simulation experiment and result analysis
Experiment initialization
In the simulation experiment, the experimental hardware configuration is set as follows: using Windows 10 system, having independent graphics card, having 64-bit processor, CPU of 2.64 GHz, and system memory of 4GB. The content of the experiment is to design a VR landscape of the park by using this method. In order to ensure the effectiveness of the energy-saving design scheme designed in this paper, simulation experiments are carried out for indoor landscape design and outdoor forest park landscape design, and the parameters are set. The upper limit value, lower limit value, uplink transmission value and front row value of the virtual imaging database are set. The range of A1, B2, C3, D4 is within the range of [12.8, 66.7] value (Ervin 2020). The experiment designed in this paper has a certain set of operation control parameters to ensure that there is a certain angle between the image contour direction and the far-infrared image edge direction. The changes before and after setting are shown in Fig. 7. The angle between image counter direction and infrared image direction changes before and after setting is represented in Fig. 7. In that, the image counter direction angle is 50 and infrared image degree is 85 and the angle becomes 50 and 136° after setting changes.

The angle between the contour direction of the test image and the far-infrared image
In order to ensure the effectiveness of the energy-saving design scheme based on VR, the energy-saving data error needs to be optimized and adjusted, and the adjustment data need to refer to the conventional limited data table. The reference data are shown in Table 1.
Experimental results and analysis of interior landscape design
Under the condition of VR Assisted use and detail optimization, all indoor landscape positions are fixed and unchangeable, which is set in this paper. In order to facilitate the experiment, the following experiments are also carried out under the conditions of VR Assisted use and detail optimization. Taking an area of 100 m2 as the experimental object, five kinds of household equipment including refrigerator, bed, washing machine, television, and water heater were tested for landscape reconstruction. According to the rated power of the foregoing five kinds of household equipment, the parameters are set and the rated power of the bed is defined as 0. Extreme weather conditions (floods, droughts, heat waves, etc.) are becoming more common, raising the threats to critical infrastructure (C.I). FIWARE incorporates block chain based identity verification and access protection (Kumar et al. 2021) (Table 2).
In the table: Xidx, Yidx, and Zidx are the index components of X, Y, and Z directions of indoor landscape, which are calculated by formula (6); Tidx is the sum of the three index components, which is also the main reference index in the following experiments. The experiment is divided into two parts. The location of the above five indoor landscapes is found in the residence. The digital model and the ordinary model are used to detect the five landscapes respectively. According to the detection results, the reconstruction panorama is drawn and compared with the real location, as shown in Fig. 8. The collaborative control of identity and authorization policies by using block-chain technologies to maintain a global view of the system's authentication policies and incorporating it into the FIWARE network (Esposito et al. 2021). Through the comparison of Fig. 8, it can be clearly found that there is a large error between the detection results and the real results when the ordinary model is applied to the reconstruction and monitoring of the indoor landscape, and the error continues to increase with the increase of the Tidx index; while the error between the detection results and the real results is small when the digital model is used for the reconstruction and monitoring of the indoor landscape, and with the increase of the Tidx index, the error between the detection results and the real results is small, This error also did not appear to increase. The visual saliency guided complex image retrieval model is proposed to describe the image pattern and multi-feature fusion paradigm of images, then to complete the image recovery method the group sparse logistic regression model is implemented to compare the different state-of–art models (Wang et al. 2020). Therefore, it can be proved that the digital model designed in this paper can better construct dynamic virtual scene and complete 3D graphics reconstruction of complex real scene. The difference among the normal model and Lumion model is shown in Fig. 8. From the figure, it is clear that there is large error gap between real results and detection results. The error continuously increases when the normal model is applied in reconstruction while checking indoor landscape, but in digital model, the error is reduced consequently. The image segmentation plays a vital role in medical image processing. The image segmentation is process of extracting of region from the images also, Darwinian Particle Swarm Optimization (DPSO) and Particle Swarm Optimization (PSO) algorithms are evaluated on different threshold values and the higher PSNR value shows the expertise of the proposal. Data transmission in telemedicine was assessed for the efficiency of compression algorithms by means of metrics (Ahilan et al. 2019).

Comparison of test results and real results of different models. (a) Digital model based on Lumion, (b) Normal model
Experimental results and analysis of forest park landscape design
Under the conditions of VR Assisted use and detail optimization, we also carry out simulation experiments for forest park landscape design. The simulation results are shown in Fig. 9.

Simulation of park scene with VR aided use and detail optimization
It can be seen from Fig. 9 that the VR scene designed by this method is vivid and vivid. Among them, the details of clouds being blown away by the wind, the leaf layers of tall trees, and the shadows of ground plants can be well displayed; the lighting and object layout of the whole scene are better. The Geographic Information System (GIS) allows for easy calculation of land dimensions, as well as the use of Georeferential tags and the two-fold validation are used to improve the efficiency during detection. Also, the saturation, hue and the intensity of the sample features are improved by the performance of Bag of feature model (Rajmohan et al. 2020). To sum up, the VR landscape effect designed by this method is good, mainly because: after the construction of the landscape model, the script rendering method is used to render the landscape, which can not only realize the batch rendering of scene elements, but also achieve good rendering effect, and the overall design simulation effect is excellent. In order to highlight the advantages of this method in the design of VR landscape, 3DSMAX VR simulation design method and SKETCHUP VR simulation design method are used to carry out comparative test at the same time. This method is easy to use, rendering objects with high efficiency, good effect, has a strong plant library function; 3DSMAX VR simulation design method using process is more complex, difficult to understand, rendering effect is better, but the efficiency is low, and does not have the plant library function; SKETCHUP VR simulation design method is also easy to use, but the effect of rendering landscape is general and effective. In addition, only this method has the function of dynamic model and animation. To sum up, the performance of this method is better, and the experiment will further verify this viewpoint. 3DSMAX VR is combined with the VR technology to build dynamic and interactive architectural visualizations. It is also used to improve and optimize the scenes before converting them into entertaining environments but with Sketch Up for VR, the viewer involves in peers and clients in a powerful new way to test, organize, and interact in Mixed Reality. It is also used to Sketch Up Viewer to display and communicate with Sketch Up models on a variety of VR and Mixed Reality applications.
The accuracy of visual modeling is the key step to ensure the design of VR landscape effect. The smaller the modeling error, the better is the simulation design effect. Therefore, the error of visual modeling of the three methods is tested experimentally. Six plant landscapes A, B, C, D, E, and F are selected as the test objects. The visual modeling errors of the three methods are calculated according to the displacement and actual position of the modeling results, as shown in Fig. 10.

Visual modeling error curves of different VR simulation design methods
Comparing the modeling error curves of the three methods in Fig. 10, it can be seen that the modeling time of the method in this paper is only 10 s (the modeling time is taken as an integer here and ignored after the decimal point). The whole modeling error is between 1 and 3%, and the error curve fluctuation is small and uniform, and there is no significant peak value. It shows that the method in this paper has small error and good stability. The modeling time of 3dsmax VR simulation design method is about 20 s. During the whole modeling process, the error of this method is between 5 and 21%, and the error fluctuation is larger than that of the method in this paper. In the whole process, there are four fluctuations of low and peak. SKETCHUP VR simulation design method consumes 25 s for visual modeling, which is the longest among the three methods. Moreover, the modeling error of SKETCHUP VR simulation design method fluctuates from 5 to 25%. From the change trend of error curve, it can be seen that the error fluctuation of this method is large, and the stability performance is poor, so it cannot be used for high efficiency and high quality landscape visualization design. According to the performance data of the aforementioned three methods, the visual modeling time of this method is the shortest and the stability is the best. Although there is an error of about 2%, it will not cause great interference to the later landscape simulation design, so it has advantages over the similar methods.
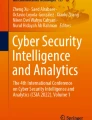
In order to highlight the efficiency advantage of this method in rendering VR landscape, three methods including this method are used to carry out comparative test. On the basis of the experimental setup in the “Experiment initialization” section, the time consumption of rendering 1 object and 20 objects by the three methods is recorded, and the efficiency of single rendering and batch rendering of the three methods is analyzed. In order to ensure the scientificity of the experimental results, each method is tested 5 times, and the experimental results are shown in Fig. 11.

Comparison of rendering time of three algorithms in different situations. (a) Rendering single object, (b) Rendering multiple objects
From the analysis of Fig. 11(a), it can be seen that this method only consumes about 0.5 s to render an object. Compared with 3dsmax VR simulation design method, this method saves 6.5 s compared with 3dsmax VR simulation design method, and 5.6S compared with SKETCHUP VR simulation design method. From the perspective of growth trend, with the increase of the number of experiments, the rendering time of this method is getting lower and lower. The last experiment only consumes 0.2 s to render a single object; 3dsmax VR simulation design method is contrary to the method in this paper, with the expansion of the experiment, the rendering time increases continuously, and the longest time in five tests is as high as 8 s; SKETCHUP VR simulation design method in the whole test process shows the trend of first increase and then decrease, and the third experiment takes the most rendering time. The length was about 6.6 s, and decreased to 5.6 s at the end of the experiment.
From the foregoing three groups of data, we can see that the rendering time of this method is short and efficient; in the later stage of the experiment, the rendering time gradually converges to the lowest. Due to the high application frequency of batch rendering object function in the process of VR simulation landscape design, the rendering time is also the key to affect the design efficiency. By analyzing Fig. 11(b), we can see the time consumption of rendering 20 objects by three methods, that is, the time consumption of batch rendering. The time curve of rendering batch objects in this paper is located at the bottom of the image, which is far lower than the other two methods, showing a trend of first increasing and then decreasing. In the third and fourth experiments, the longest time is 10.1 s, and it is reduced to 7.5 s at the end of the experiment. In general, the average rendering time of this method is about 8.9 s, and the average rendering time is only about 0.445 s. Therefore, the efficiency of rendering batch objects is higher than that of single objects. Experimental results show that this method has efficiency advantages in rendering single objects and batch objects.
Conclusion
Energy saving design of VR technology not only challenges the performance of equipment, but also challenges designers. An important aspect of energy-saving design of VR technology is to optimize the process of VR 3D imaging technology. In the early data acquisition process, because of the use of the contrast image of the visual image, so the power consumption is very large; moreover, the related calculation in the process of establishing the virtual image is very complicated, and the power consumption is also extremely huge. In view of this, this paper puts forward a kind of energy-saving design scheme of Forest Park Landscape Based on VR, and verifies the effectiveness of the design through the effective proof of the experiment. According to the designer’s personalized and high standard design requirements, this paper proposes a VR landscape simulation design and implementation method based on Lumion. According to the design process, 3dsmax software is used to build the landscape model and import it into Lumion software. Lumion uses Irregular Triangulation model to create visualization effect for the imported landscape model; adds material and landscape effects to the visual landscape model to improve the details of landscape simulation design; uses get Value and set Value program to render landscape elements in batch, and this method is batch rendering The efficiency of the object is higher than that of a single object, which saves a lot of time for the designer, and outputs the visual image of VR Landscape after storage. On this basis, through the indoor and outdoor landscape design process, we verify the effectiveness of the VR Landscape energy-saving design, design the simulation contrast experiment, and fully prove the effectiveness of the forest park landscape energy-saving design based on VR through the experimental data analysis.
References
Ahilan A, Manogaran G, Raja C, Kadry S, Kumar SN, Agees Kumar C, Jarin T, Sujatha K, Priyan MK, Gokulnath CB, Senthil Murugan N, Parthasarathy (2019) Segmentation by fractional order Darwinian particle swarm optimization based multilevel thresholding and improved lossless prediction based compression algorithm for medical images. IEEE Access 7:89570–89580
Atwa SMH, Ibrahim MG, Saleh AM, Murata R (2019) Development of sustainable landscape design guidelines for a green business park using virtual reality. Sustain Cities Soc 48:101543
Berg LP, Vance JM (2017) Industry use of virtual reality in product design and manufacturing: a survey. Virtual Reality 21(1):1–17
Büttner S, Mucha H, Funk M, Kosch T, Aehnelt M, Robert S, Röcker C (2017) The design space of augmented and virtual reality applications for assistive environments in manufacturing: a visual approach. In: Proceedings of the 10th International Conference on Pervasive Technologies Related to Assistive Environments. pp 433–440
Ervin SM (2020) A brief history and tentative taxonomy of digital landscape architecture. J Digit Landsc Archit 2–11
Esposito C, Ficco M, Gupta BB (2021) Block chain-based authentication and authorization for smart city applications. J Inf Process Manag 58(2):102468
Gao T, Liang H, Chen Y, Qiu L (2019) Comparisons of landscape preferences through three different perceptual approaches. Int J Environ Res Public Health 16(23):4754
George BH, Sleipness OR, Quebbeman A (2017) Using virtual reality as a design input: impacts on collaboration in a university design studio setting. J Digit Landsc Archit 2:252–259
Johnson-Glenberg MC (2019) The Necessary Nine: Design Principles for Embodied VR and Active Stem Education. In: Learning in a Digital World. Springer, Singapore, pp 83–112
Kumar N, Vikas P, Gupta BB, Goyal MK (2021) A novel framework for risk assessment and resilience of critical infrastructure towards climate change. J Technol Forecast Soc Chang 165–120532
Lei Z, Shimizu S, Ota N, Ito Y, Zhang Y (2017) Construction of Urban Design Support System using Cloud Computing Type Virtual Reality and Case Study. Int Rev Spat Plan Sustain Dev 5(1):15–28
Li Z, Cheng Y, Yuan Y (2018) Research on the Application of Virtual Reality Technology in Landscape Design Teaching. Educ Sci: Theory Pract 18(5). https://doi.org/10.12738/estp.2018.5.037
Li L, Chen F, Yu Y, Shen S (2020) Using 3D Virtual VR Technology to Build Rural Landscape Environment. In: International Conference on Applications and Techniques in Cyber Security and Intelligence. Springer, Cham, pp 313–319
Liu X (2020) Three-dimensional visualized urban landscape planning and design based on virtual reality technology. IEEE Access
Liu J, Zhu T (2020) Application of 5G+ VR Technology in Landscape Design Teaching. In: International Conference of Pioneering Computer Scientists, Engineers and Educators. Springer, Singapore, pp 601–619
Ma Z, Xia B (2017) Research on Dynamic Simulation of Virtual Reality Technology in Landscape Architecture Construction. Rev Fac Ing 32(5)
Mengots A (2016) Review of digital tools for landscape architecture. Sci J Latvia Univ Agric Landsc Archit Art 8(8):72–77
Menin A, Torchelsen R, Nedel L (2018) An analysis of VR technology used in immersive simulations with a serious game perspective. IEEE Comput Graph Appl 38(2):57–73
Pan X, Hamilton AFDC (2018) Why and how to use virtual reality to study human social interaction: the challenges of exploring a new research landscape. Br J Psychol 109(3):395–417
Rajmohan G, Chinnappan CV, William AD, Balakrishnan SC, Muthu BA, Manogaran G (2020) Revamping land coverage analysis using aerial satellite image mapping. Trans Emerg Telecommun Technol. https://doi.org/10.1002/ett.3927
Rong W (2018) Some thoughts on using VR technology to communicate culture. Open J Soc Sci 6(10):88–94
Sleipness OR, George BH (2017) Impacts of immersive virtual reality on three-dimensional design processes: opportunities and constraints for landscape architecture studio pedagogy. Landsc Res Rec 6:2–10
Southall H, Marmion M, Davies A (2019) Adapting Jake Knapp’s design sprint approach for AR/VR applications in digital heritage. In: Augmented reality and virtual reality. Springer, Cham, pp 59–70
Stone JA, Strafford BW, North JS, Toner C, Davids K (2018) Effectiveness and efficiency of virtual reality designs to enhance athlete development: an ecological dynamics perspective. Mov Sport Sci-Sci Mot 102:51–60
Wang H (2019) Landscape design of coastal area based on virtual reality technology and intelligent algorithm. J Intell Fuzzy Syst 37(5):5955–5963
Wang H, Li Z, Yang L, Gupta BB, Choi C (2020) Visual saliency guided complex image retrieval. J Recogn Lett 130:64–72
Zhou C, Zhao TY, Zhu ZL (2016) The Application of Digital Technology in the Design of Landscape Architecture and Education Reform. In: 2016 Eighth International Conference on Measuring Technology and Mechatronics Automation (ICMTMA). IEEE, pp 692–695
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author(s) declare that they have no competing interests.
Additional information
Responsible Editor: Syed Hassan Ahmed
This article is part of the Topical Collection on Data Science for Ocean Data Visualization and Modeling
Rights and permissions
About this article

Cite this article
Shan, P., Sun, W. Auxiliary use and detail optimization of computer VR technology in landscape design. Arab J Geosci 14, 798 (2021). https://doi.org/10.1007/s12517-021-07131-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12517-021-07131-1