
Abstract
Shallow water waves refer to the waves with the bottom boundary affecting the movement of water quality points when the ratio of water depth to wavelength is small. Under investigation in this paper is a (2+1)-dimensional generalized modified dispersive water-wave (GMDWW) system for the shallow water waves. We obtain the Lie point symmetry generators and Lie symmetry groups for the GMDWW system via the Lie group method. Optimal system of the one-dimensional subalgebras is derived. According to that optimal system, we obtain certain symmetry reductions. Hyperbolic-function, trigonometric-function and rational solutions for the GMDWW system are derived via the polynomial expansion, Riccati equation expansion and \(\left( \frac{G^{'}}{G}\right) \) expansion methods.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Nonlinear evolution equations (NLEEs) have been used to describe certain nonlinear phenomena in, e.g., fluid mechanics, condensed matter physics, plasma physics, elastic mechanics, particle physics and optical communication [1,2,3,4,5,6,7,8]. For instance, people have seen a Whitham-Broer-Kaup system describing the dispersive long wave in shallow water [9], a variable-coefficient generalized dispersive water-wave system describing the long weakly-nonlinear and weakly-dispersive surface waves of variable depth in the shallow water [10], a generalized (2+1)-dimensional dispersive long-wave system describing the nonlinear and dispersive long gravity waves in two horizontal directions on the shallow water of an open sea or a wide channel of finite depth [11], a modified dispersive water-wave system describing the nonlinear and dispersive long gravity waves traveling in two horizontal directions on the shallow waters of uniform depth [12], and a Boussinesq-Burgers system describing the propagation of the shallow water waves [13]. Other relevant systems in fluid mechanics have been reported, e.g., in Refs. [14,15,16,17,18,19,20,21,22,23,24,25,26,27,28,29]. Studies on the analytic solutions of the NLEEs have provided the insight into the physical aspects of the problems and further applications [30,31,32,33]. In order to obtain different solutions of the NLEEs, such as the solitons, periodic waves, breather waves, travelling waves and rogue waves [34,35,36,37,38,39,40,41,42], methods have been proposed, e.g., the Hirota bilinear method, Pfaffian technique, Bäcklund transformation, Hirota-Riemann method, Darboux transformation and Lie group method [43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58].
Lie symmetry method has been applied to the NLEEs to obtain certain symmetry groups, symmetry reductions, analytic solutions and optimal systems of the subalgebras [50, 52, 59, 60]. With a given subgroup, numbers of the independent variables in an NLEE have been reduced, based on which the group-invariant solutions are derived [60].
For the shallow water waves, Refs. [61,62,63,64] have presented a (2+1)-dimensional modified dispersive water-wave system:
where \(u=u(x,y,t)\) indicates the height of the water surface, \(v=v(x,y,t)\) indicates the horizontal velocity of the water wave, and the subscripts denote the partial derivatives with respect to the scaled space variables x, y and time variable t. System (1) has been used to describe the nonlinear and dispersive long gravity waves travelling in two horizontal directions on the shallow water of uniform depth [61,62,63,64]. Residual symmetry and soliton solutions of System (1) have been derived [61]. Non-travelling wave solutions of System (1) have been obtained via the generalized projective Riccati equation method [62]. Soliton-trigonometric waves, soliton-cosine periodic waves, and soliton-cnoidal waves solutions of System (1) have been derived via the consistent Riccati expansion method [63]. Hybrid solutions of System (1) which describe the interactions among the lump, kink soliton and stripe soliton have been derived [64].
Ref. [65] has considered a generalization of System (1) for the shallow water waves:
where \(\alpha \) and \(\beta \) are the nonzero constants, \(u=u(x,y,t)\) denotes the height of the water surface, \(v=v(x,y,t)\) is the horizontal velocity of the water wave, and the subscripts denote the partial derivatives with respect to the scaled space variables x, y and time variable t. Ref. [65] has constructed certain scaling transformations, hetero-Bäcklund transformations and similarity reductions for System (2). When \(\alpha =1\) and \(\beta =2\), System (2) reduces to System (1).
However, to our knowledge, Lie point symmetry generators, Lie symmetry groups and symmetry reductions for System (2) have not been discussed. Hyperbolic-function, trigonometric-function and rational solutions for System (2) have not been investigated via the polynomial expansion, Riccati equation expansion and \(\left( \frac{G^{'}}{G}\right) \) expansion methods. In Sect. 2, the Lie point symmetry generators and Lie symmetry groups for System (2) will be derived. In Sect. 3, symmetry reductions will be obtained through the Lie point symmetry generators. Hyperbolic-function, trigonometric-function and rational solutions for System (2) will be constructed via the polynomial expansion, Riccati equation expansion and \(\left( \frac{G^{'}}{G}\right) \) expansion methods. In Sect. 4, the conclusions will be given.
2 Lie Group Analysis for System (2)
2.1 Lie Point Symmetry Generators for System (2)
Based on the Lie group method [66,67,68,69,70], a one-parameter Lie group of the infinitesimal transformations acting on the independent and dependent variables can be defined as
where \({\tilde{x}}\), \({\tilde{y}}\), \({\tilde{t}}\), \({\tilde{u}}\), \({\tilde{v}}\), \(\xi \), \(\eta \), \(\tau \), \(\varphi \) and \(\phi \) are the real functions of x, y, t, u and v, \(\epsilon \) is a parameter of the infinitesimal transformation and \(O(\epsilon ^2)\) is the infinitesimal of the same order of \(\epsilon ^2\).
Lie point symmetry generators for System (2) are derived as
where \(\xi \), \(\eta \), \(\tau \), \(\phi \) and \(\varphi \) satisfy the following conditions
with
\(\text {pr}^{(3)}V(\cdot )\) and \(\text {pr}^{(2)}V(\cdot )\) denote the third and second prolongation of V, respectively, defined as [67],
where \(D_{x}\), \(D_{y}\) and \(D_{t}\) are the total derivative operators.
Expanding Expressions (5) and splitting on the derivatives of u and v, we have the following results:
Solving the system of equations given in (8), we obtain the following results
where \(c_1\), \(c_2\), \(c_3\), \(c_4\), \(c_{5}\) and \(c_6\) are the real constants. Lie point symmetry generators for System (2) are derived as:
Motivated by Ref. [68], we show commutation relations among Lie Symmetry Generators (10) in Table 1, where the entries in row I and column J are represented by the commutators \([V_{I}, V_{J}]\), commutators \([V_{I}, V_{J}]\) are defined as [70]
2.2 Lie Symmetry Group for System (2)
In order to obtain the group transformation for System (2), which is produced by the infinitesimal generators \(V_{I}\) \(,I=1,2,3,4,5,6\), we need to solve the initial problems:
Then, we can derive the Lie symmetry groups \(g_{I}\)’s generated by \(V_{I}\)
If \({\bar{f}}(x, y, t)\) and \({\bar{g}}(x, y, t)\) are certain solutions for System (2), the corresponding solutions for System (2) can be obtained
2.3 Optimal System for System (2)
According to the methods in Ref. [50, 70], we construct an optimal system of one-dimensional subalgebras for System (2) in this section.
Lie algebra for System (2) spanned via Lie Point Symmetry Generators (10) can be written as
where \(q_{1},q_{2},\ldots ,q_{6}\) are the real constants. Linear transformations of the vector \(q=(q_{1},q_{2},\ldots ,q_{6})\) are found from their generator
where \(c_{\imath \jmath }^{\lambda }\) are the structure constants of the commutation table.
According to Expressions (16) and Table 1, \(E_{1}, E_{2},~E_{3},~E_{4},~E_{5}\) and \(E_{6}\) can be written as
For \(E_{1}, E_{2},~E_{3},~E_{4},~E_{5}\) and \(E_{6}\), the Lie equations with parameters \(b_{\imath }\) and the initial condition \({\widetilde{q}}|_{b_{\imath }=0}=q\) can be written as
Solutions to Eqs. (18) give the transformation
Motivated by Ref. [71], we construct an optimal system of one-dimensional subalgebras for System (2) through the simplifications of the vector
with the transformations \(T_{1}-T_{6}\). As a result, we will find the simplest representatives of each class of similar Vector (20). Substituting these representatives in Expression (15), we will obtain the optimal system of one-dimensional subalgebras of System (2).
-
Case 1 \(q_{6}\ne 0\) Taking \(b_{1}=-\frac{q_{1}}{q_{6}}\) in \(T_{1}\), \(b_{2}=-\frac{q_{2}}{2q_{6}}\) in \(T_{2}\) and \(b_{5}=\frac{q_{5}}{q_{6}}\) in \(T_{5}\), we can obtain \(q_{1}=q_{2}=q_{5}=0\). Thus, Vector (20) is reduced to the form
$$\begin{aligned} (0,0,q_{3},q_{4},0,q_{6}),~q_{6}\ne 0. \end{aligned}$$(21)If we take \(q_{4}\ne 0\) from Vector (21) and subject it to the transformations \(T_{3}\) with \(b_{3}=\frac{q_{3}}{q_{4}+q_{6}}\), we obtain
$$\begin{aligned} (0,0,0,q_{4},0,q_{6}),~q_{6}\ne 0,~q_{4}\ne 0. \end{aligned}$$(22)Thus, the following representatives for the optimal system can be obtained,
$$\begin{aligned} V_{6}\pm V_{4}. \end{aligned}$$(23)We next take \(q_{4}=0\) which gives the reduced vector
$$\begin{aligned} (0,0,q_{3},0,0,q_{6}),~q_{6}\ne 0. \end{aligned}$$(24)Thus, taking all possible combinations, we obtain the representations
$$\begin{aligned} V_{6},~V_{6}\pm V_{3}. \end{aligned}$$(25) -
Case 2 \(q_{6}=0\) This will be divided into the following subcases. 2.1. \(q_{5}\ne 0\) Taking \(b_2=-\frac{q_{1}}{\beta q_{5}}\) in \(T_2\), we can obtain \(q_1=0\). Thus, Vector (20) is reduced to the form
$$\begin{aligned} (0,q_{2},q_{3},q_{4},q_{5},0),~q_{5}\ne 0. \end{aligned}$$(26)If we take \(q_{4}\ne 0\) from the reduced vector (26) and subject it to the transformations \(T_{3}\) with \(b_{3}=\frac{q_{3}}{q_{4}}\), we obtain
$$\begin{aligned} (0,q_{2},0,q_{4},q_{5},0),~q_{5}\ne 0,~q_{4}\ne 0. \end{aligned}$$(27)Thus, the following representatives for the optimal system can be obtained,
$$\begin{aligned} V_{5}\pm V_{4},~V_{5}\pm V_{4}\pm V_{2}. \end{aligned}$$(28)We next take \(q_{4}=0\) which gives the reduced vector
$$\begin{aligned} (0,q_{2},q_{3},0,q_{5},0),~q_{5}\ne 0. \end{aligned}$$(29)Thus, taking all possible combinations, we obtain
$$\begin{aligned} V_{5},~V_{5}\pm V_{2},~V_{5}\pm V_{3},~V_{5}\pm V_{3}\pm V_{2}. \end{aligned}$$(30)2.2. \(q_{5}=0\) Taking \(b_5=\frac{q_{1}}{\beta q_{2}}\) in \(T_5\), we can obtain \(q_1=0\). Thus, Vector (20) is reduced to the form
$$\begin{aligned} (0,q_{2},q_{3},q_{4},0,0),~q_{2}\ne 0. \end{aligned}$$(31)Similarly, we get
$$\begin{aligned} V_{2},~V_{2}\pm V_{4},~V_{2}\pm V_{3}. \end{aligned}$$(32)2.2.1. \(q_{2}=0\) Taking \(b_3=\frac{q_{3}}{\beta q_{4}}\) in \(T_3\), we can obtain \(q_3=0\). Thus, Vector (20) is reduced to the form
$$\begin{aligned} (q_{1},0,0,q_{4},0,0),~q_{4}\ne 0. \end{aligned}$$(33)Thus, taking all possible combinations, we obtain
$$\begin{aligned} V_{4},~V_{4}\pm V_{1}. \end{aligned}$$(34)2.2.1.1. \(q_{4}=0\) Vector (20) is reduced to the form
$$\begin{aligned} (q_{1},0,q_{3},0,0,0). \end{aligned}$$(35)Thus, taking all possible combinations, we obtain
$$\begin{aligned} V_{1},~V_{3},~V_{1}\pm V_{3}. \end{aligned}$$(36)Consequently, the optimal system of the one-dimensional subalgebras for System (2) given via Lie Point Symmetry Generators (10) is the following form:
$$\begin{aligned}{} & {} V_{1},~V_{2},~V_{3},~V_{4},~V_{5},~V_{6},~V_{1}\pm V_{3},~V_{4}\pm V_{1},~V_{2}\pm V_{3},~V_{2}\pm V_{4},~V_{5}\pm V_{2},\nonumber \\{} & {} V_{5}\pm V_{3},~V_{5}\pm V_{4},~V_{5}\pm V_{4}\pm V_{2},~V_{5}\pm V_{3}\pm V_{2},~V_{6}\pm V_{4},~V_{6}\pm V_{3}. \end{aligned}$$(37)
3 Symmetry Reductions and Analytic Solutions for System (2)
In this section, we get the reduction equations for System (2) via Optimal System (37). Certain solutions for System (2) can be constructed via the reduction equations.
-
Case 1 For the Lie point symmetry \(V_2=\partial _t\), the following group-invariant solutions can be obtained:
$$\begin{aligned} u=P(x_1,y_1),~v=Q(x_1,y_1), \end{aligned}$$(38)where \(x_1=x\), \(y_1=y\), P and Q denote the functions of \(x_1\) and \(y_1\). Substituting Expressions (38) into System (2), the reduced system can be obtained:
$$\begin{aligned} \begin{aligned}&\alpha P_{x_{1}x_{1}y_{1}}-2\alpha Q_{x_{1}x_{1}}-\beta P_{x_{1}}P_{y_{1}}-\beta P P_{x_{1}y_{1}}=0,\\&\alpha Q_{x_{1}x_{1}}+\beta P_{x_{1}}Q+\beta Q_{x_{1}}P=0. \end{aligned} \end{aligned}$$(39)
Using the Lie group method to System (39), we have
where \(s_1\), \(s_2\) and \(s_3\) are the real constants. Lie point symmetry generators for System (39) are derived as follows:
For the Lie point symmetry \(n_{1}\Gamma _1+\Gamma _2\), the symmetry produces the following group-invariant solutions:
where \(n_{1}\) is a real constant, H and K are the real functions of f. Substituting Expressions (42) into System (39) gives rise to the following reduced equations:
Based on the \(\left( \frac{G^{'}}{G}\right) \) expansion method [72], we suppose solutions for System (43) have the following forms:
where m and n are the positive integers, \(a_{j}\)’s and \(b_{j}\)’s are the real constants, and G is a function of f. G satisfies the following ordinary differential equation
where \(G^{'}=\frac{\text {d}G}{\text {d}f}\) and \(G^{''}=\frac{\text {d}^2G}{\text {d}f^2}\), A and B are the real constants. m and n can be determined via the homogeneous balance method between the highest order derivative term and the nonlinear term appearing in System (43). Thus, we derive \(m=1\) and \(n=2\). Substituting Expressions (44) and Constraint (45) into System (43) as well as setting the coefficients of the like powers \((\frac{G^{'}}{G})\) equal to vanish, we have
When \(B^2-4A>0\), hyperbolic-function solutions for System (2) can be derived
where \(C_1\) and \(C_2\) are the real constants.
When \(B^2-4A=0\), solutions for System (2) can be obtained
where \(C_3\) and \(C_4\) are the real constants.
When \(B^2-4A<0\), we get trigonometric-function solutions for System (2)
where \(C_5\) and \(C_6\) are the real constants.
-
Case 2 For the Lie point symmetry \(V^{(1)}=V_3+V_1\), we derive the following group-invariant solutions:
$$\begin{aligned} f_1=x-y~,h_1=t,~u=R(f_1,h_1),~v=S(f_{1},h_{1}), \end{aligned}$$(50)where R and S denote the functions of \(f_1\) and \(h_1\). Substituting Expressions (50) into System (2), the reduced system can be derived as
$$\begin{aligned} \begin{aligned}&-R_{h_{1}f_{1}}-\alpha R_{f_{1}f_{1}f_{1}}-2\alpha S_{f_{1}f_{1}} +\beta RR_{f_{1}f_{1}}+\beta R_{f_{1}}^{2}=0,\\&-S_{h_{1}}-\alpha S_{f_{1}f_{1}}-\beta RS_{f_{1}}-\beta R_{f_{1}}S=0. \end{aligned} \end{aligned}$$(51)
Applying the Lie group method on System (51), we have
where \(s_4\), \(s_5\) and \(s_6\) are the real constants. Thus, the Lie point symmetry generators for Eqs. (51) can be derived as follows:
For the Lie point symmetry \(k_1\Upsilon _1+\Upsilon _2\), the symmetry produces the following group-invariant solutions:
where \(k_1\) is a real constants, and \(\psi \) and \(\chi \) are the real functions of z. Substituting Expressions (54) into System (51), we get the following reduced equations:
Based on the polynomial expansion method [73], we suppose solutions for Eqs. (55) have the following forms:
where M and N are the positive integers, \(b_{\iota }\)’s and \(g_{\kappa }\)’s are the real constants. Here, W satisfies
where \(p_1\) is a real constant and \(p_2\) is a non-negative real constant. M and N can be determined via the homogeneous balance method. We derive \(M=1\) and \(N=2\). Substituting Expressions (56) and Constraint (57) into System (55) as well as setting the coefficients of W(z) equal to zero, we obtain the following results:
We derive trigonometric-function solutions of System (2) as
-
Case 3 For the Lie point symmetry \(V^{(2)}= V_2+V_3\), the following group-invariant solutions can be obtained:
$$\begin{aligned} f_2=x,~h_2=y-t,u=\mu (f_2,h_2),~v=\nu (f_{2},h_{2}), \end{aligned}$$(60)where \(\mu \) and \(\nu \) are the functions of \(f_2\) and \(h_2\).
Substituting Expressions (60) into System (2), we have the following reduced equations:
Using Lie group method to System (61), we obtain
where \(s_7\), \(s_{8}\) and \(s_{9}\) are the real constants. Thus, the Lie point symmetry generators for System (61) are derived as follows:
For the Lie point symmetry \(k_{2}\Theta _1 +\Theta _2\), the symmetry produces the following group-invariant solutions:

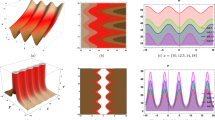
One soliton via Solutions (70) with the parameters as \(\alpha = 1\), \(\beta = 1\), \(k_{2} = 2\)
where \(k_{2}\) is a real constant, L and K are the real functions of \(z_1\). Substituting Expressions (64) into System (61), we have the following reduced equations:
Based on the Riccati equation expansion method [74], the solutions for System (65) have the following forms:
where \(\omega (z_{1})\) satisfy the Riccati equation
with
where \(\theta _{\gamma }\)’s and \(\rho _{\delta }\)’s are the real constants, e and q are the integers that can be determined via the homogeneous balance method. We derive \(e=1\) and \(q=2\). Substituting Expressions (66) into Eqs. (65) with Constraints (67) and (68), and setting the coefficients of \(\omega (z_{1})\) equal to vanish, we obtain the following results:
We derive the soliton solutions of System (2) as
Figures 1 exhibit the propagation of one soliton. One kink-soliton on the (x, y) planes propagate along the same direction in y-axis, as seen in Fig. 1\((a_{1})\)–\((a_{3})\); One bell-soliton on the (x, y) planes propagate along the same direction in y-axis, as shown in Fig. 1\((b_{1})\)–\((b_{3})\).
4 Conclusions
Shallow water waves have been referred to the waves with the bottom boundary affecting the movement of water quality points when the ratio of water depth to wavelength is small. In this paper, a (2+1)-dimensional generalized modified dispersive water-wave system in fluid mechanics, i.e., System (2), has been investigated. We have derived Lie Point Symmetry Generators (10) and Lie Symmetry Groups (13) for System (2) via the Lie group method. Optimal system of the one-dimensional subalgebras for System (2) has been given as Lie Symmetry Generators (10). Symmetry Reductions (43), (55) and (65) for System (2) have been derived from Cases 1–3. Hyperbolic Function Solutions (47), Rational Solutions (48), Trigonometric Function Solutions (49) and (59), and Soliton Solutions (70) for System (2) have been obtained via the polynomial expansion, Riccati equation expansion and \(\left( \frac{G^{'}}{G}\right) \) expansion methods. In addition, these hyperbolic function, rational and trigonometric function solutions will help to study the analytical solutions of other nonlinear evolution equations in fluid mechanics, plasma physics, nonlinear dynamics, nonlinear optics and mathematical physics. In the future, we will try to construct the soliton, breather, rouge-wave and hybrid solutions via the Darboux transformation and bilinear neural network method.
References
Cheng, C.D., Tian, B., Ma, Y.X., et al.: Pfaffian, breather and hybrid solutions for a (2+1)-dimensional generalized nonlinear system in fluid mechanics and plasma physics. Phys. Fluids 34, 115132 (2022)
Tamang, J., Saha, A.: Bifurcations of small-amplitude supernonlinear waves of the mKdV and modified Gardner equations in a three-component electron-ion plasma. Phys. Plasmas 27, 012105 (2020)
Moleleki, L.D., Simbanefayi, I., Khalique, C.M.: Symmetry solutions and conservation laws of a (3+1)-dimensional generalized KP-Boussinesq equation in fluid mechanics. Chin. J. Phys. 68, 940–949 (2020)
Liu, R.X., Tian, B., Liu, L.C., et al.: Bilinear forms, N-soliton solutions and soliton interactions for a fourth-order dispersive nonlinear Schrödinger equation in condensed-matter physics and biophysics. Phys. B 413, 120–125 (2013)
Kayum, M.A., Ara, S., Osman, M.S., et al.: Onset of the broad-ranging general stable soliton solutions of nonlinear equations in physics and gas dynamics. Results Phys. 20, 103762 (2021)
Yang, D.Y., Tian, B., Tian, H.Y., et al.: Darboux transformation, localized waves and conservation laws for an M-coupled variable-coefficient nonlinear Schrödinger system in an inhomogeneous optical fiber. Chaos Solitons Fract. 156, 111719 (2022)
Khalique, C.M., Adeyemo, O.D.: Langrangian formulation and solitary wave solutions of a generalized Zakharov-Kuznetsov equation with dual power-law nonlinearity in physical sciences and engineering. J. Ocean Eng. Sci. (2023). https://doi.org/10.1016/j.joes.2021.12.001
Adeyemo, O.D.: Applications of cnoidal and snoidal wave solutions via optimal system of subalgebras for a generalized extended (2+1)-D quantum Zakharov-Kuznetsov equation with power-law nonlinearity in oceanography and ocean engineering. J. Ocean Eng. Sci. (2023). https://doi.org/10.1016/j.joes.2022.04.012
Wang, L., Gao, Y.T., Gai, X.L., et al.: Inelastic interactions and double Wronskian solutions for the Whitham-Broer-Kaup model in shallow water. Phys. Scr. 80, 065017 (2009)
Meng, D.X., Gao, Y.T., Wang, L., et al.: Elastic and inelastic interactions of solitons for a variable coefficient generalized dispersive water-wave system. Nonlinear Dyn. 69, 391–398 (2012)
Gao, X.T., Tian, B., Shen, Y., et al.: Considering the shallow water of a wide channel or an open sea through a generalized (2+1)-dimensional dispersive long-wave system. Qual. Theory Dyn. Syst. 21, 104 (2022)
Lakestani, M., Manafian, J.: Application of the ITEM for the modified dispersive water-wave system. Opt. Quantum Electron. 49, 128 (2017)
Wang, P., Tian, B., Liu, W.J., et al.: Lax pair, Bäcklund transformation and multi-soliton solutions for the Boussinesq-Burgers equations from shallow water waves. Appl. Math. Comput. 218, 1726–1734 (2011)
Abloeitz, M.J.: Nonlinear Dispersive Waves: Asymptotic Analysis and Solitons. Cambridge Univ. Press, Cambridge (2011)
Zdyrski, T., Feddersen, F.: Wind-induced changes to surface gravity wave shape in shallow water. J. Fluid Mech. 913, A27 (2021)
Liu, F.Y., Gao, Y.T., Yu, X., et al.: Wronskian, Gramian, Pfaffian and periodic-wave solutions for a (3+1)-dimensional generalized nonlinear evolution equation arising in the shallow water waves. Nonlinear Dyn. 108, 1599–1616 (2022)
Gao, X.T., Tian, B.: Water-wave studies on a (2+1)-dimensional generalized variable-coefficient Boiti-Leon-Pempinelli system. Appl. Math. Lett. 128, 107858 (2022)
Cheng, C.D., Tian, B., Zhou, T.Y., et al.: Wronskian solutions and Pfaffianization for a (3+1)-dimensional generalized variable-coefficient Kadomtsev-Petviashvili equation in a fluid or plasma. Phys. Fluids 35, 037101 (2023)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Shallow-water investigations: Bilinear auto-Bäcklund transformations for a (3+1)-dimensional generalized nonlinear evolution system. Appl. Comput. Math. 22, 133–142 (2023)
Shen, Y., Tian, B., Cheng, C.D., et al.: Pfaffian solutions and nonlinear waves of a (3+1)-dimensional generalized Konopelchenko-Dubrovsky-Kaup-Kupershmidt system in fluid mechanics. Phys. Fluids 35, 025103 (2023)
Gao, X.T., Tian, B., Feng, C.H.: In oceanography, acoustics and hydrodynamics: investigations on an extended coupled (2+1)-dimensional Burgers system. Chin. J. Phys. 77, 2818–2824 (2022)
Liu, F.Y., Gao, Y.T., Yu, X.: Rogue-wave, rational and semi-rational solutions for a generalized (3+1)-dimensional Yu-Toda-Sasa-Fukuyama equation in a two-layer fluid. Nonlinear Dyn. 111, 3713–3723 (2023)
Chakraverty, S., Karunakar, P., Karunakar, P., et al.: Homotopy perturbation method for predicting tsunami wave propagation with crisp and uncertain parameters. Int. J. Numer. Methods Heat Fluid Flow 31, 92–105 (2020)
Shen, Y., Tian, B., Liu, S.H., et al.: Studies on certain bilinear form, N-soliton, higher-order breather, periodic-wave and hybrid solutions to a (3+1)-dimensional shallow water wave equation with time-dependent coefficients. Nonlinear Dyn. 108, 2447–2460 (2022)
Chakravarty, S., Kodama, Y.: Construction of KP solitons from wave patterns. J. Phys. A Math. Theor. 47, 025201 (2013)
Zabusky, N.J., Galvin, C.J.: Shallow-water waves, the Korteweg-deVries equation and solitons. J. Fluid Mech. 47, 811–824 (1971)
Wu, H.Y., Jiang, L.H.: Instruction on the construction of coherent structures based on variable separation solutions of (2+1)-dimensional nonlinear evolution equations in fluid mechanics. Nonlinear Dyn. 97, 403–412 (2019)
Dai, C.Q., Wang, Y.Y., Biswas, A.: Dynamics of dispersive long waves in fluids. Ocean Eng. 81, 77–88 (2014)
Tang, X.Y., Lou, S.Y., Zhang, Y.: Localized excitations in (2+1)-dimensional systems. Phys. Rev. E 66, 046601 (2002)
Wang, M., Tian, B., Zhou, T.Y.: Darboux transformation, generalized Darboux transformation and vector breathers for a matrix Lakshmanan-Porsezian-Daniel equation in a Heisenberg ferromagnetic spin chain. Chaos Solitons Fract. 152, 111411 (2021)
Feng, L.L., Tian, S.F., Wang, X.B., et al.: Rogue waves, homoclinic breather waves and soliton waves for the (2+1)-dimensional B-type Kadomtsev-Petviashvili equation. Appl. Math. Lett. 65, 90–97 (2017)
Zhou, T.Y., Tian, B., Chen, Y.Q., et al.: Painlevé analysis, auto-Bäcklund transformation and analytic solutions of a (2+1)-dimensional generalized Burgers system with the variable coefficients in a fluid. Nonlinear Dyn. 108, 2417–2428 (2022)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Reflecting upon some electromagnetic waves in a ferromagnetic film via a variable-coefficient modified Kadomtsev-Petviashvili system. Appl. Math. Lett. 132, 108189 (2022)
Ma, Y.L., Wazwaz, A.M., Li, B.Q.: New extended Kadomtsev-Petviashvili equation: multiple soliton solutions, breather, lump and interaction solutions. Nonlinear Dyn. 104, 1581–1594 (2021)
Wu, X.H., Gao, Y.T., Yu, X., et al.: Binary Darboux transformation, solitons, periodic waves and modulation instability for a nonlocal Lakshmanan-Porsezian-Daniel equation. Wave Motion 114, 103036 (2022)
Zhou, T.Y., Tian, B.: Auto-Bäcklund transformations, Lax pair, bilinear forms and bright solitons for an extended (3+1)-dimensional nonlinear Schrödinger equation in an optical fiber. Appl. Math. Lett. 133, 108280 (2022)
Shen, Y., Tian, B., Zhou, T.Y., et al.: N-fold Darboux transformation and solitonic interactions for the Kraenkel-Manna-Merle system in a saturated ferromagnetic material. Nonlinear Dyn. 111, 2641–2649 (2023)
Wu, X.H., Gao, Y.T., Yu, X., et al.: Vector breathers, rogue and breather-rogue waves for a coupled mixed derivative nonlinear Schrödinger system in an optical fiber. Nonlinear Dyn. 111, 5641–5653 (2023)
Zhou, T.Y., Tian, B., Zhang, C.R., et al.: Auto-Bäcklund transformations, bilinear forms, multiple-soliton, quasi-soliton and hybrid solutions of a (3+1)-dimensional modified Korteweg-de Vries-Zakharov-Kuznetsov equation in an electron-positron plasma. Eur. Phys. J. Plus 137, 912 (2022)
Yang, D.Y., Tian, B., Hu, C.C., et al.: The generalized Darboux transformation and higher-order rogue waves for a coupled nonlinear Schrödinger system with the four-wave mixing terms in a birefringent fiber. Eur. Phys. J. Plus 137, 1213 (2022)
Alam, M.N., Li, X.: Symbolic methods to construct a cusp, breathers, kink, rogue waves and some soliton waves solutions of nonlinear partial differential equations. Comput. Methods Differ. Equ. 8, 597–609 (2020)
Yue, C., Lu, D.C., Khater, M.M.A.: Abundant wave accurate analytical solutions of the fractional nonlinear Hirota-Satsuma-Shallow water wave equation. Fluids 6, 235 (2021)
Li, L.Q., Gao, Y.T., Yu, X., et al.: Gramian solutions and solitonic interactions of a (2+1)-dimensional Broer-Kaup-Kupershmidt system for the shallow water. Int. J. Numer. Methods Heat Fluid Flow 32, 2282–2295 (2022)
Abd-el-Malek, M.B., Amin, A.M.: Lie group method for solving generalized Hirota-Satsuma coupled Korteweg-de Vries (KdV) equations. Appl. Math. Comput. 224, 501–516 (2013)
Wu, X.H., Gao, Y.T., Yu, X., et al.: N-fold generalized Darboux transformation and soliton interactions for a three-wave resonant interaction system in a weakly nonlinear dispersive medium. Chaos Solitons Fract. 165, 112786 (2022)
Yang, D.Y., Tian, B., Hu, C.C., et al.: Conservation laws and breather-to-soliton transition for a variable-coefficient modified Hirota equation in an inhomogeneous optical fiber. Wave. Random Complex (2023). https://doi.org/10.1080/17455030.2021.1983237
Adeyemo, O.D., Zhang, L., Khalique, C.M.: Bifurcation theory, Lie group-invariant solutions of subalgebras and conservation laws of a generalized (2+1)-dimensional BK equation type II in plasma physics and fluid mechanics. Mathematics 10, 2391 (2022)
Adeyemo, O.D., Khalique, C.M., Gasimov, Y.S., et al.: Variational and nonvariational approaches with Lie algebra of a generalized (3+1)-dimensional nonlinear potential Yu-Toda-Sasa-Fukuyama equation in Engineering and Physics. Alex. Eng. J. 63, 17–43 (2023)
Adeyemo, O.D., Khalique, C.M.: Lie group classification of generalized variable coefficient Korteweg-de Vries equation with dual power-law nonlinearities with linear damping and dispersion in quantum field theory. Symmetry 14, 83 (2022)
Adeyemo, O.D., Khalique, C.M.: Dynamical soliton wave structures of one-dimensional Lie subalgebras via group-invariant solutions of a higher-dimensional soliton equation with various applications in ocean physics and mechatronics engineering. Commun. Appl. Math. Comput. 4, 1531–1582 (2022)
Adeyemo, O.D., Zhang, L., Khalique, C.M.: Optimal solutions of Lie subalgebra, dynamical system, travelling wave solutions and conserved currents of (3+1)-dimensional generalized Zakharov-Kuznetsov equation type I. Eur. Phys. J. Plus 137, 954 (2022)
Adeyemo, O.D., Khalique, C.M.: Dynamics of soliton waves of group-invariant solutions through optimal system of an extended KP-like equation in higher dimensions with applications in medical sciences and mathematical physics. J. Geom. Phys. 177, 104502 (2022)
Kumar, S., Rani, S.: Lie symmetry reductions and dynamics of soliton solutions of (2+1)-dimensional Pavlov equation. Pramana-J. Phys. 94, 116 (2020)
Kumar, S., Rani, S.: Symmetries of optimal system, various closed-form solutions, and propagation of different wave profiles for the Boussinesq-Burgers system in ocean waves. Phys. Fluids 34, 037109 (2022)
Kumar, S., Rani, S.: Study of exact analytical solutions and various wave profiles of a new extended (2+1)-dimensional Boussinesq equation using symmetry analysis. J. Ocean Eng. Sci. 7, 475–484 (2022)
Rani, S., Kumar, S., Kumar, R.: Invariance analysis for determining the closed-form solutions, optimal system, and various wave profiles for a (2+1)-dimensional weakly coupled B-Type Kadomtsev-Petviashvili equations. J. Ocean Eng. Sci. (2023). https://doi.org/10.1016/j.joes.2021.12.007
Kumar, S., Rani, S.: Invariance analysis, optimal system, closed-form solutions and dynamical wave structures of a (2+1)-dimensional dissipative long wave system. Phys. Scr. 96, 125202 (2021)
Kumar, S., Rani, S., Mann, N.: Diverse analytical wave solutions and dynamical behaviors of the new (2+1)-dimensional Sakovich equation emerging in fluid dynamics. Eur. Phys. J. Plus 137, 1226 (2022)
Sahoo, S., Ray, S.S.: Lie symmetry analysis and exact solutions of (3+1) dimensional Yu-Toda-Sasa-Fukuyama equation in mathematical physics. Comput. Math. Appl. 73, 253–260 (2017)
Hu, X., Li, Y., Chen, Y.: A direct algorithm of one-dimensional optimal system for the group invariant solutions. J. Math. Phys. 56, 053504 (2015)
Ma, Z.Y., Fei, J.X., Du, X.Y.: Symmetry reduction of the (2+1)-dimensional modified dispersive water-wave system. Commun. Theor. Phys. 64, 127–132 (2015)
Li, D.S., Zhang, H.Q.: New families of non-travelling wave solutions to the (2+1)-dimensional modified dispersive water-wave system. Chin. Phys. 13, 1377–1381 (2004)
Liang, J.F., Wang, X.: Consistent Riccati expansion for finding interaction solutions of (2+1)-dimensional modified dispersive water-wave system. Math. Meth. Appl. Sci. 42, 6131–6138 (2019)
Ren, B., Ma, W.X., Yu, J.: Rational solutions and their interaction solutions of the (2+1)-dimensional modified dispersive water wave equation. Comput. Math. Appl. 77, 2086–2095 (2019)
Gao, X.Y., Guo, Y.J., Shan, W.R.: Symbolically computing the shallow water via a (2+1)-dimensional generalized modified dispersive water-wave system: similarity reductions, scaling and hetero-Bäcklund transformations. Qual. Theory Dyn. Syst. 22, 17 (2023)
Bluman, G.W., Kumei, S.: Symmetries and Differential Equations. Springer, Berlin (1989)
Rui, W., Zhang, Y., Yang, F.: Group classification and conservation laws of a sixth-order thin film type equation. Nonlinear Anal. 43, 467–476 (2018)
Albares, P., Conde, J.M., Estévez, P.G.: Spectral problem for a two-component nonlinear Schrödinger equation in (2+1) dimensions: singular manifold method and Lie point symmetries. Appl. Math. Comput. 355, 585–594 (2019)
Liu, F.Y., Gao, Y.T.: Lie group analysis for a higher-order Boussinesq-Burgers system. Appl. Math. Lett. 132, 108094 (2022)
Olver, P.J.: Application of Lie Group to Differential Equations. Springer, New York (2000)
Abdulwahhab, M.A.: Optimal system and exact solutions for the generalized system of 2-dimensional Burgers equations with infinite Reynolds number. Commun. Nonlinear Sci. Numer. Simul. 20, 98–112 (2015)
Ayhan, B., Bekir, A.: The G’/G-expansion method for the nonlinear lattice equations. Commun. Nonlinear Sci. Numer. Simul. 17, 3490–3498 (2012)
Huang, W.H.: A polynomial expansion method and its application in the coupled Zakharov-Kuznetsov equations. Chaos Solitons Fract. 29, 365–371 (2006)
Kong, L.Q., Dai, C.Q.: Some discussions about variable separation of nonlinear models using Riccati equation expansion method. Nonlinear Dyn. 81, 1553–1561 (2015)
Acknowledgements
We express our sincere thanks to the Editors, Reviewers and members of our discussion group for their valuable suggestions. This work has been supported by the National Natural Science Foundation of China under Grant No. 11772017.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
No potential competing interest was reported by the authors.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Liu, FY., Gao, YT., Yu, X. et al. Lie Group Analysis for a (2+1)-dimensional Generalized Modified Dispersive Water-Wave System for the Shallow Water Waves. Qual. Theory Dyn. Syst. 22, 129 (2023). https://doi.org/10.1007/s12346-023-00792-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s12346-023-00792-1