
Abstract
This study aimed to compare the effects of synchronous (SYN) vs asynchronous (ASY) modes of wheelchair propulsion in field sprint tests on performance and biomechanical parameters. Seven elite wheelchair basketball players performed two separate (SYN and ASY) straight-line 20-m sprints. ASY increased sprint time and decreased push frequency compared to SYN (p < 0.05). Peak velocity and total force for the mean of the last three pushes were higher in SYN. Rate of rise was higher in SYN for the first, second and third pushes (p < 0.05). No significant difference was found for peak power and mean work. SYN mode induces better performance (13% difference in speed). However, the increase in rate of rise, thus the expansion of the total force when gripping the hand rim, push frequency and total force in SYN modes seems to expand the risk of developing musculoskeletal disorders during manual wheelchair propulsion for upper limb joints than ASY.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Manual wheelchair propulsion patterns were described in the literature as ineffective and were said to pose high risks for developing musculoskeletal disorders [1]. Manual wheelchair users are at greater risk of developing injuries of the upper limbs. This is due in part to repeated, significant loads on the upper limbs for wheelchair propulsion [2]. Push frequency (PF) is also an important factor associated with injury from repetitive movements [3]. Push frequency is defined as the number of pushes or total number of left and right arm movements performed per minute.
In the literature, Goosey-Tolfrey and Kirk described two main propulsion modes for manual wheelchairs [4], namely synchronous (SYN) and asynchronous (ASY). SYN is when the arms are working together, applying force simultaneously on both hand rims. Conversely, ASY propulsion is when the arms are pushing alternately; in other words, when force is being applied on the hand rim by only one arm at a time.
A few authors have studied the effectiveness of manual wheelchair propulsion modes [4,5,6,7]; however, the results are equivocal. Indeed, during submaximal push mode tasks (SYN vs ASY), Glaser et al. [5] reported significantly greater efficiencies in the ASY mode than in the SYN mode. In contrast, various studies have demonstrated that the SYN mode appears to be more economical and more efficient than the ASY mode [4, 6]. Finally, Lenton et al. [7] found no physiological differences between the SYN and ASY modes of propulsion.
More recently, Faupin et al. [8] found that the SYN mode leads to better performance than the ASY mode in terms of maximal propulsion velocity. However, ASY propulsion allowed greater continuity of the hand-rim force application, reducing fluctuations in the velocity profile. The average maximum speed, obtained by all the subjects on the four sprints carried out, was higher in SYN compared with ASY, irrespective of the camber angle. Moreover, a higher PF was found in SYN than in ASY. However, a limitation of this study concerns the use of only one standardized basketball wheelchair on a stationary ergometer. Faupin et al. [8] recommend further experiments in the field.
Lenton et al. [9] also studied the efficiency of manual wheelchair propulsion but in two submaximal exercises using both propulsion modes on a wheelchair roller ergometer. They described and compared the force application characteristics of ASY and SYN hand-rim propulsion under various frequency conditions in able-bodied participants. These authors examined the fraction of effective force (FEF: the ratio between the magnitude of the tangentially directed force and the total force applied to the hand rim), which they described as ineffective in wheelchair propulsion. Moreover, they described the rate of force development (or rate of rise, RoR), a risk criterion for developing musculoskeletal disorders [9]. They showed that ASY propulsion offers no kinetic or physiological advantage during hand-rim wheelchair propulsion.
In wheelchair basketball, the ability to start and sprint from standstill is considered an important component of performance [1]. This has rarely been investigated in the literature. Moreover, the main studies are performed on roller ergometers [5, 10]. Thus, this study focused on the sprinting component of experienced basketball players. In this study, field tests were performed so that the data for the manual wheelchair mimics athletes wheeling in a real game. As recommended by Vanlandewijck et al. [1], biomechanical studies in wheelchair sports aimed mainly at optimizing sport performance or preventing sport injuries.
Consequently, the aim of this study is to compare the two propulsion modes on the field and their effects on sprinting performance as well as on force production and PF. We hypothesize that the SYN mode is more effective than the ASY mode but that the ASY mode is less constraining (RoR and PF) for upper limb joints.
2 Methods
2.1 Participants
Seven participants, one female and six males, all members of the French wheelchair basketball team, participated in the study. When participating in international events, players are classified into eight levels (from 1 to 4.5), based on the International Wheelchair Basketball Federation [11]. Participants had equal experience with SYN propulsion and, whilst they did not specially train with ASY, all were using it during certain phases of the game.
The means and standard deviations (SDs) of the anthropometric data (gender, age, mass, height, disability) are given in Table 1.
All participants were fully informed of any risks before giving their written informed consent to participate in these experiments. The experimental procedures were approved by the local hospital ethics committee and complied with the ethical standards of the 1975 Helsinki Declaration.
2.2 Materials
All participants used their own manual sport wheelchair. For each wheel, the tire pressure was 700 kPa (7 bar or 101.5 psi). The manual sport wheelchair was instrumented with a SmartWheel (SW) on the dominant hand side. A standard SW weighs 4.9 kg [12]. In accordance with the Masson et al. [13] method, to offset the extra weight of the SW load cells and the greater moment of inertia that follows, a 2-kg weight was positioned around the hub on the non-dominant hand side.
The instrumented wheel used was a 24-inch-diameter SW [14], which has been used in number of studies [12, 15]. SmartWheel is an instrumented wheel that measures three dimensional forces and moments applied to the hand rim during propulsion [15, 16]. SmartWheel, which uses Bluetooth technology, is connected to a computer that visually displays the wheelchair propulsion. Its characteristics and properties have been described elsewhere [16, 17]. SmartWheel collects kinetic data via an infrared wireless transmitter at 240 Hz, using the research mode setting.
2.3 Testing procedure
Adapted from a field test designed by Brasile [18] and Vanlandewijck et al. [19], the “20-m Sprint Capacity Test” is a 20-m straight-line test for assessing the best sprint time and the maximum speed, which are important aspects of a basketball wheelchair player. Players were positioned behind the starting line and began as soon as they are ready. They were asked to cover the 20-m distance as quickly as possible (Fig. 1). Between each sprint, a complete 5-min rest period was imposed. Each test was performed on a parquet floor, according to two methods of execution (one SYN and one ASY) in random order. Sprinting times were recorded with photoelectric cells (TC timing system, Brower Timing System, Colorado, USA). All tests were preceded by a standardized warm-up including wheelchair basketball drills and accelerations.

Layout of the 20-m sprint test on a basketball court
2.4 Measurements
All kinetic data are filtered using the SW manufacturer’s 32-tap Finite Impulse Response low-pass digital filter with a cut-off frequency of 20 Hz. This process allows filtered forces and moments applied for each push to be determined. For each push phase of the propulsion cycle, the SW provides the unilateral forces (F) and moments (M) in the three wheel-based reference planes, Fx—horizontally forward; Fy—vertically downward; Fz—horizontally inwards; and Mz—referring to the moment produced around the hub in the plane of the wheel [15, 16]. For wheel reference planes, SW measures forces and moment in the local coordinate space.
The peak power per propulsion cycle, P peak, was found from
where ω is the angular velocity peak of the wheel and Mz peak is the peak of torque applied to the wheel axis [20].
The power variation, P, according to the propulsion mode during the sprint, was found from
P is used to represent the fluctuation of the power according to time and to compare this fluctuation according to the propulsion modes.
At the end of the sprint, when velocity is maximal and stable, the mean work per cycle [21], Work, is calculated from
The total force, F tot, applied to the hand rim was found from [16]
In addition, the rate of force development, RoR, was found from [3]
The first three pushes of the sprint (corresponding to the start phase) and the average of the last three pushes of the sprint (corresponding to the maximal speed phase) are retained. For each sprint, the following values are recorded: peak velocity per propulsion cycle (v p), PF, average FEF during the last three pushes of the sprint (FEFend), total force (F tot) applied to the hand rim, and RoR. Push frequency, expressed in pushes per minute (pushes min−1), is described as the total number of arm movements on one wheel per minute [7].
Veeger et al. [22] describe the effective fraction of the total force, FEF, expressed as a percentage, as the ratio of the tangential force, F TAN, contributing directly to the rotation of the wheels, and the F tot applied to the hand rim. The effective fraction of the total force, FEF, was found from [16]
This FEF is defined from a purely mechanical point of view by Boninger et al. [23] as the efficiency of the forces applied to the hand rims that contributes to the wheelchair propulsion. MATLAB was used (Version 8.5., MathWorks, Inc; Natick, Massachusetts, USA) to make graphics and calculate the kinematic and kinetic data required for analysis.
2.5 Statistical analysis
The data for all measured variables were presented as means and SD. Normality and homogeneity of the distribution were verified via Shapiro–Wilks and Levene tests, respectively. The distribution of each variable and homogeneity of variance were not satisfied. The Wilcoxon signed-rank test was applied to compare the difference of the propulsion mode (SYN vs ASY) on the variables. Z-score was calculated for all pairwise comparisons. The level of significance was set at p < 0.05. All statistical analyses were performed using Statistica software© (Statsoft, Inc; Tulsa, Oklahoma, USA, version 10.0).
3 Results
Table 2 shows means and SDs of PF, FEFend, time and work per cycle. These parameters were also calculated on the average of the relative values for each subject expressed as a percentage, as well as the SD.
SYN propulsion involves a significant increase of 16.5% PF (p = 0.018, Z = 2.37) and a significant decrease of 13% sprint time (p = 0.028, Z = 2.19) compared to ASY mode, but no significant difference is shown for FEFend (p = 0.49) and work per cycle (p = 0.86).
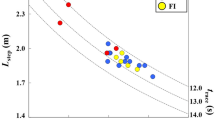
The main effects of the propulsion mode on velocity and force parameters are shown in Figs. 2, 3 and 4. Figure 2 shows fluctuations in the v p for the average of the last three pushes of the sprint, according to the propulsion mode.

Peak velocity (v p) fluctuation according to the propulsion mode during the first three pushes of the sprint (P1: first push, P2: second push, P3: third push) and the average of the last three pushes of the sprint (end). *Significantly different between SYN and ASY (p < 0.05)

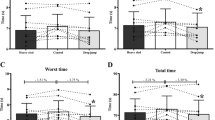
Rate of Rise (RoR) fluctuation according to the propulsion mode during the first three pushes of the sprint (P1: first push, P2: second push, P3: third push) and the average of the last three pushes of the sprint (end). *Significantly different between SYN and ASY (p < 0.05)

Total force (F tot) fluctuation according to the propulsion mode during the first three pushes of the sprint (P1: first push, P2: second push, P3: third push) and the average of the last three pushes of the sprint (end). *Significantly different between SYN and ASY (p < 0.05)
Peak velocity varies according to the sprint phase and the mode of propulsion, but this difference is only significant at the end of the sprint when the velocity is maximal, with a significant increase of 17% v p in SYN vs ASY (p = 0.017, Z = 2.37).
SYN mode involves an increase of 15% RoR compared to ASY mode (Fig. 3), and this difference is not significant for the average of the last three pushes of the sprint (p = 0.31, Z = 1.01).
Figure 4 shows that the trend in Ftot is higher with the SYN than with the ASY mode.
Total Force significantly increased in SYN compared to ASY during the first push (198.9 ± 41.3 vs 133.2 ± 67.8 N, p = 0.042, Z = 2.03) and the average of the last three pushes (142.9 ± 59.8 vs 107.3 ± 48.6 N, p = 0.042, Z = 2.03), but not over pushes 2 (p = 0.09, Z = 1.69) and 3 (p = 0.17, Z = 1.35).
Effects of the propulsion mode on P peak are shown in Fig. 5. The trend in average power for all subjects is higher with SYN propulsion than with ASY propulsion for the first three pushes of the sprint and the average of the last three pushes of the sprint (Fig. 5), but not significantly (all p > 0.09).

Peak of power (P) fluctuation according to the propulsion mode during the first three pushes of the sprint (P1: first push, P2: second push, P3: third push) and the average of the last three pushes of the sprint (end)
Conversely, during sprints of a single subject (Fig. 6), power variation profile difference between the two modes shows a higher peak for the first push in SYN than in ASY, then fluctuations for following pushes. Figure 6 shows the great variability of power for a subject.

Example data illustrating power fluctuation according to the propulsion mode during the sprint for participant 1
Filtered velocity variations during the sprint according to the propulsion mode can be observed in Fig. 7.

Example data illustrating filtered velocity fluctuation according to the propulsion mode during the sprint for participant 1
Due to the force application by a single upper extremity on a single wheel at a time mean force application is more continuous, velocity increases faster in ASY mode but is lower in comparison to the SYN propulsion, where velocity increases more progressively but reaches a much higher level at the end of sprint.
4 Discussion
The aim of the study was to compare SYN and ASY modes and their effects on performance in elite basketball players. To our knowledge, the present study is the first to assess the forces applied during SYN vs ASY hand-rim wheelchair propulsion in maximal sprinting with highly trained wheelchair basketball players in a field test. The results show that: (1) the SYN mode provides better performance than the ASY mode, in terms of v p and sprint time, (2) the SYN mode seems to be more constraining for upper limb joints than the ASY mode with respect to PF and RoR.
4.1 Effects of propulsion mode on performance
In maximal sprinting conditions with highly trained wheelchair basketball players, this study confirms that the SYN mode generates better performance compared with the ASY mode. Indeed, statistical analyses show a significantly shorter time required to complete the 20 m in SYN than in ASY mode of propulsion. This shorter time is associated with v p for the last three pushes of the sprint being higher in SYN mode (p < 0.05). Therefore, on average, over a five-second sprint, depending on the difference in speed, a player using SYN gains 2.2 meters on a player using ASY. This is in agreement with Faupin et al. [8], who found a higher v p in SYN vs ASY mode during eight-second sprints with a roller ergometer. However, the physiological responses reached during SYN versus ASY modes of propulsion are contradictory according to the literature [4,5,6,7]. These differences could be due to the fact that ASY propulsion should require various levels of active and passive work to stabilize the trunk and accelerate the arms, resulting in changes to energy cost, and hence improved or reduced efficiency of propulsion [7]. These studies differ in terms of their exercise and evaluation protocols. However, their common point is that the exercise proposed by these studies is not representative of repeated sprint activity characteristics of collective sports. Indeed, in wheelchair basketball, the ability to start and sprint from standstill is very important [1], as is the ability to handle the ball. The present results show no significant difference in terms of Ppeak, but reveal a higher average P peak in SYN than in ASY (Fig. 5). This lack of significant difference may be due to the major SD between the P peak developed by the subjects. Moreover, there is a high variability of P developed during each sprint depending on propulsion mode and subject (Fig. 6). This corresponds to the Vegter et al. study [24], which found a high variability between and within the push cycles, and can explain the lack of significant difference in our study.
For work per cycle, no statistically significant difference was found, but average work per cycle was higher in ASY than in SYN. This result is due to the fact that PF was significantly higher in SYN than in ASY. Those results are higher in the SYN mode of propulsion than those of Masson et al. study [13], where thirteen highly trained wheelchair basketball players (9 ± 5 years’ playing experience) performed the tests (24 ± 7 years; 66.6 ± 15.6 kg).
These differences in results can be explained by the conditions in which the tests were carried out; our study is based on sprint and field tests whereas Masson et al. [13] used a 4-min test at a fixed velocity and gradient, in SYN propulsion, on a motor-driven treadmill.
4.2 Effects of propulsion mode on risk of injury
In two different studies, Boninger et al. [3, 10] suggest that high risks of developing musculoskeletal disorders during manual wheelchair propulsion are due to increased cadence, force magnitudes and rate of force development. In our study, the results for the RoR, PF and total force were lower in ASY than in SYN mode (Figs. 3, 4; Table 2). Consequently, SYN mode is probably more constraining for upper limb joints than the ASY mode. Faupin et al. [8] showed that the fluctuation in the velocity profile is lower for ASY than for SYN. Therefore, ASY propulsion allows greater continuity of the hand-rim force application, thus reducing fluctuations in the velocity profile. Our results agree with these findings.
Total force is higher in SYN than in ASY mode (Fig. 4). Conversely, no significant difference was identified for FEFend. Many studies have examined the effectiveness of force application during wheelchair propulsion [25,26,27, 29]. The non-tangentially directed propulsion force is theoretically ineffective and must, therefore, be partially responsible for the low mechanical efficiency [29]. However, Veeger [28] showed that an effective force application was accompanied by an increase in shoulder muscle activity. To our knowledge, only Lenton et al. [9] have attempted to investigate force production in ASY hand-rim propulsion and to compare it with the traditional SYN propulsion. During submaximal propulsion, Lenton et al. [9] showed that the FEF and the F tot are significantly lower in the SYN than in the ASY mode of propulsion. However, these authors [9] suggested that FEF cannot be used as an indicator for efficient propulsion in the ASY mode. They showed that the most efficient propulsion technique from a kinetic viewpoint is not necessarily the most efficient from the physiological perspective. They further suggested FEF to be an invariant characteristic of the biological system that changes only with extreme geometric changes or with continued learning and training where detailed fine-tuning is critical.
4.3 Limitations and future recommendations
A limitation of this study concerns the use of a 24-inch SW, which led to a small sample size: only seven subjects participated and all of them are members of the French basketball wheelchair team. Therefore, participants had a classification of less than 2.5 points (average classification: 1.5 ± 0.8) and were termed “low-point players”, with low physical capacities, compared to “high-point players”, having a classification higher than 2.5 points, with more physical capacities, as explained by the IWBF classification. ASY mode could disadvantage wheelchair players with high-level lesions or a functional asymmetry with a dominant side and contralateral side deficit in strength, balance, sensibility and coordination. It would be interesting for future studies to be carried out with SWs of various sizes to reach a larger sample of wheelchair basketball players, which could strengthen our findings. Moreover, it would be interesting to conduct future studies using two SWs in order to fully understand the differences between the two different modes of propulsion. However, it must be considered that an additional mass on one side of the wheelchair has been added, equivalent to the overweight of the SW; the addition of this mass may have altered performance and propulsion (i.e., the force needed to accelerate the wheelchair). Future studies could assess both physiological and biomechanical parameters simultaneously so as to fully understand the differences between the two modes of wheelchair propulsion. In agreement with Scheer et al. [30], it would be interesting to confirm that, for wheelchair athletes, a 15-m overground wheelchair sprint test can be used to assess wheelchair-specific anaerobic work capacity.
5 Conclusion
During propulsion in maximal sprinting conditions of highly trained wheelchair basketball players, we showed that the SYN propulsion produces better sprint times and v p compared with the ASY mode. However, RoR, total force and PF are higher in SYN mode than in ASY mode, with ASY mode appearing to be less constraining for upper limb joints. Therefore, future studies should be conducted with a larger and more homogeneous sample, to further validate our findings. To do so, it is necessary to have access to various SW diameters. Moreover, it seems important to pursue this investigation by studying propulsion modes with a ball. Finally, future studies should assess the physiological and biomechanical parameters simultaneously to fully understand the differences between the two modes of wheelchair propulsion.
References
Vanlandewijck Y, Theisen D, Daly D (2001) Wheelchair propulsion biomechanics: implications for wheelchair sports. Sports Med 31:339–367
Bayley JC, Cochran TP, Sledge CB (1987) The weight-bearing shoulder. The impingement syndrome in paraplegics. J Bone Joint Surg Am 69:676–678
Boninger ML, Cooper RA, Baldwin MA, Shimada SD, Koontz A (1999) Wheelchair pushrim kinetics: body weight and median nerve function. Arch Phys Med Rehab 80:910–915
Goosey-Tolfrey VL, Kirk JH (2003) Effect of push frequency and strategy variations on economy and perceived exertion during wheelchair propulsion. Eur J Appl Physiol 90:153–158
Glaser RM, Sawka MN, Young RE, Suryaprasad AG (1980) Applied physiology for wheelchair design. J Physiol 48:41–44
Lenton JP, Fowler N, van der Woude L, Goosey-Tolfrey VL (2008) Efficiency of wheelchair propulsion and effects of strategy. Int J Sports Med 29:384–389
Lenton JP, Van der Woude L, Fowler N, Goosey-Tolfrey VL (2009) Effects of arm frequency during synchronous and asynchronous wheelchair propulsion on efficiency. Int J Sports Med 30(4):233–239
Faupin A, Borel B, Meyer C, Gorce P, Watelain E (2013) Effects of synchronous versus asynchronous mode of propulsion on wheelchair basketball sprinting. Disabil Rehabil Assist Technol 8:496–501
Lenton JP, Van der Woude L, Fowler N, Nicholson G, Goosey-Tolfrey V (2014) Hand-rim forces and gross mechanical efficiency in asynchronous and synchronous wheelchair propulsion: a comparison. Int J Sports Med 35:223–231
Boninger ML, Baldwin M, Cooper RA, Koontz A, Chan L (2000) Manual wheelchair pushrim biomechanics and axle position. Arch Phys Med Rehab 81:608–613
International Wheelchair Basketball Federation (2014) Functions of the classification commission. IOP publishing IWBF. http://www.iwbf.org/index.php/2014-08-31-08-38-47/2014-08-31-08-39-32/functions-of-the-classification-commission. Accessed 12 July 2016
Cowan RE, Boninger ML, Sawatzky BJ, Mazoyer BD, Cooper RA (2008) Preliminary outcomes of the smartwheel users’ group database: a proposed framework for clinicians to objectively evaluate manual wheelchair propulsion. Arch Phys Med Rehab 89:260–268
Mason BS, van der Woude LHV, Lenton JP, Goosey-Tolfrey VL (2012) Effects of wheel and hand-rim size on sub-maximal propulsion in wheelchair athletes. Med Sci Sports Exercise 44:126–134
Three Rivers Holdings LLC (2013) SmartWheel user’s guide 2014. Mesa, Arizona
Asato K, Cooper RA, Robertson RN, Ster JF (1993) SMARTWheel: development and testing of a system for measuring manual wheelchair propulsion dynamics. IEEE Trans Biomed Eng 40:1320–1324
Cooper RA, Robertson RN, Van Sickle DP, Boninger ML (1997) Methods for determining three-dimensional wheelchair pushrim forces and moments: a technical note. J Rehabil Res Dev 34:162–170
Robertson RN, Boninger ML, Cooper RA, Shimada SD (1996) Pushrim forces and joint kinetics during wheelchair propulsion. Arch Phys Med Rehab 77:856–864
Brasile FM (1986) Wheelchair basketball skills proficiencies versus disability classification. Adapt Phys Act Q 3:6–13
Vanlandewijck Y, Spaepen A, Lysens R (1995) Relationship between the level of physical impairment and sports performance in elite wheelchair basketball athletes. Adapt Phys Act Q 12:139–150
Niesing R, Eijskoot F, Kranse R, den Ouden AH, Storm J, Veeger HEJ, van der Woude LHV, Snijders CJ (1990) Computer-controlled wheelchair ergometer. Med Biol Eng Comput 28:329–338
Woude van der LHV, Groot de S, Hollander AP, Ingen Schenau van GJ, Rozendal RH (1986) Wheelchair ergonomics and physiological testing of prototypes. Ergonomics 29:1561–1573
Veeger HEJ, Van der Woude L, Rozendal RH (1989) Wheelchair propulsion technique at different speeds. Scand J Rehabil Med 21:197–203
Boninger ML, Cooper RA, Shimada SD, Rudy TE (1997) Shoulder and elbow motion during two speeds of wheelchair propulsion: a description using a local coordinate system. J Spinal Cord Med 35:135–144
Vegter RJ, Lamoth CJ, de Groot S, Veeger DH, van der Woude LH (2013) Variability in bimanual wheelchair propulsion: consistency of two instrumented wheels during handrim wheelchair propulsion on a motor driven treadmill. J Neuroeng Rehabil 10:9
Boninger ML, Cooper RA, Robertson RN, Shimada SD (1997) Three-dimensional pushrim forces during two speeds of wheelchair propulsion. Am J Phys Med Rehabil 76:420–426
Dallmeijer AJ, Van der Woude L, Veeger HE, Hollander AP (1998) Effectiveness of force application in manual wheelchair propulsion in persons with spinal cord injuries. Am J Phys Med Rehabil 77:213–221
Rozendaal RH, Veeger HEJ, Van der Woude L (2000) The push force pattern in manual wheelchair propulsion as a balance between cost and effect. J Biomech 36:239–247
Veeger HEJ (1999) Biomechanics of manual wheelchair propulsion. In: Van der Woude LH, Hopman MT, van Kemenade CH (eds) Biomedical aspects of manual wheelchair propulsion: The state of the art II. Amsterdam, pp 86–95
Veeger HEJ, Van der Woude L, Rozendaal RH (1992) Effect of handrim velocity on mechanical efficiency in wheelchair propulsion. Med Sci Sports Exerc 24:100–107
van der Scheer JW, de Groot S, Vegter RJ, Veeger DH, van der Woude LH (2014) Can a 15 m-overground wheelchair sprint be used to assess wheelchair-specific anaerobic work capacity? Med Eng Phys 36:432–438
Acknowledgments
The authors thank the athletes and their coaches for their participation in this study. Warm thanks as well to the “Fédération Française Handisport” (FFH) and the “Comité Régional Handisport Côte d’Azur” (CRH CA) for collaborating in this study. We also thank the “Institut National du Sport, de l’Expertise et de la Performance” (INSEP) and the region Provence-Alpes-Côte d’Azur for their financial contribution.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors report no conflicts of interest. The authors alone are responsible for the content and writing of this article.
Rights and permissions
About this article

Cite this article
Astier, M., Weissland, T., Vallier, J.M. et al. Effects of synchronous versus asynchronous push modes on performance and biomechanical parameters in elite wheelchair basketball. Sports Eng 21, 43–51 (2018). https://doi.org/10.1007/s12283-017-0245-y
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12283-017-0245-y