
Abstract
The human body sweats to release heat, and the presence of sweat may cause the sticking of fabric against skin, leading to a strong discomfort clingy perception or skin injuries. This paper describes a novel testing method designed to measure the wet cling frictional force between clothing fabrics and a wetted skin simulant. The developed methodology shows that sweating rate, sweating time, and ambient air movement influence the build-up of frictional resistance to the movement of fabrics along the surface of a sweating skin simulant. The test method enables observation of the relationships between the measured wet cling force and the construction of a selected set of polyester and cotton knit fabrics having different moisture absorption, wicking, and drying properties. This analysis reveals that thin polyester jersey knits with excellent wicking, evaporative, and drying properties exhibit low levels of wet cling. On the other hand, thicker double-knit polyester construction can exhibit lower wet cling force when its inherently greater absorption capacity minimizes moisture build-up in the skin-fabric interface. Cotton knits generally have higher wet cling resistance than polyester knits of similar thickness because of their greater capacity to retain moisture. The wet cling tester shows that moisture-related friction force is not present in knit fabrics that incorporate a durable water repellent finish, demonstrating an alternative method to reduce wet cling. It also reveals that one-way wicking fabrics reduce wet cling frictional force by transporting moisture away from the fabric–skin interface. These studies find no statistically significant correlations between standard measures of fabric moisture properties and wet cling force in this group of knit materials. This finding underscores the complex nature of the factors influencing wet cling performance. It demonstrates the utility of the developed test methodology for measuring wet cling in different conditions.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The human body sweats to release heat by evaporation, especially when working in hot conditions or performing strenuous sports or work activities [1, 2]. The build-up of liquid moisture in the clothing–skin interface can produce frictional forces between fabrics and skin. These forces excite mechanoreceptors in the skin, causing undesired sticky and clingy sensations, often called wet cling [3, 4]. The clingy sensation can be a major source of discomfort or even lead to skin injuries [5, 6].
Because wet cling sensations are associated with the presence of liquid water in the interface between fabric and skin, factors that influence the build-up of liquid moisture on the skin surface can affect the perception of stickiness. Liquid moisture accumulation on the skin surface is associated with hot and humid ambient conditions, high sweating rates, and fabrics with high evaporative resistance and little capacity to absorb moisture. Wet cling force can be expected to initially increase with the amount of water accumulation on skin, and decrease when the liquid moisture reaches a level sufficient to act as lubricant, ultimately reducing the friction force between the fabric and sweat-wetted skin [7]. Besides the amount of liquid water on the skin surface, surface energy can affect the wet cling perception. Researchers have found that hydrophobic fabrics tend to produce less perception of wet cling sensation [8, 9].
Studies of fabric wet cling properties have mainly relied on full-scale human evaluator wear trials to qualify perceived clothing discomfort [10, 11]. Raccuglia et al. found that stickiness sensation was a major source of discomfort for evaluators wearing knit garments in warm conditions [11]. They found that the intensity of the sticky sensation depended on the level of moisture saturation of the garment fabrics, instead of the fabric area contact with the skin. Their study showed that moisture-related stickiness perception was a time-dependent phenomenon; it increased with the duration of the sweat-generating activity. Studies of human sensory response to fabric wet cling sensations have more commonly used protocols that assess wet cling sensations produced by wetted fabrics brought in contact with an evaluator’s forearm [3, 12,13,14]. An example is a recent study on how stickiness perception was related to two modes of contact stimuli: friction and adhesion/separation [12]. It was reported that, although stickiness sensation was associated with both frictional and adhesion/separation contact stimuli, the moisture-related fabric friction was the primary trigger of stickiness perceptions. The study also revealed that the water absorption capacity of the fabrics was the most important factor determining stickiness perception, while fabric surface roughness did not influence these sensations [12].
Although human wear trials and forearm tests are useful methods for evaluating the wet cling properties of fabrics, they can be time-consuming and costly. Therefore, instrumented measures for characterizing fabric wet cling properties can be essential tools for wet cling measurement, especially during the initial stage of product development. Fan et al. developed an apparatus that featured a motorized test stand, force gauge, simulated skin, and test platform [7]. The testing protocol called for spraying a certain amount of water onto synthetic leather to simulate wetted skin. This procedure measured the frictional force generated by a fabric sample dragged by a force gauge over the wet simulated skin. Their study showed that the water absorbed by the sample increased gradually with dragging distance, or until the water absorbed by the test fabric reached the water absorbent capacity. They found that the measured drag force correlated well with the perceived feeling of stickiness from human studies [7].
Other bench-scale testing methods have been developed to measure wet cling forces of fabrics, including the Hohenstein Institute wet cling index tester. This device uses a wetted sintered glass plate to simulate sweating skin. It calculates a wet cling index based on the force required to draw a fabric sample mounted on a cylinder over the glass plate [15]. Ji et al. also developed a device designed to measure the adhesion force required to separate water-saturated fabric and simulated skin. They found that thin and light fabrics show a small adhesion force [16].
In summary, previous attempts that have used instrumented methods to measure the frictional forces producing wet cling sensations have only partially addressed the need for an objective method for measuring fabric wet cling performance. This is because they rely on unrealistic presentation of moisture to test fabrics. They load fabrics with predetermined amounts of water in a manner unrelated to the way fabrics actually absorb and wick moisture from sweat-wetted skin. In reality, the amount of liquid moisture present on human skin depends on the ability of the fabric to absorb, spread, and evaporate liquid sweat. Therefore, there is an ongoing need for a better method for measuring fabric wet cling properties. The enhanced method should provide a more realistic means for measuring wet cling in clothing materials worn in sweat generating activities. The ideal method should be capable of measuring the effects of different sweating rates and the duration of sweating on the build-up of wet cling forces between fabric and skin. This research seeks to develop and demonstrate a unique wet cling test method capable of evaluating how sweating and environmental conditions affect the friction force between fabric and a simulated human skin. It aims to incorporate a sweating system that more realistically simulates liquid water transmission from sweat-wetted skin to clothing fabrics.
2 Experimental Apparatus and Procedures
2.1 The Wet Cling Test Apparatus
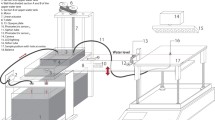
Figure 1 shows the set-up of the wet cling testing apparatus. It consists of a height-adjustable test platform onto which a synthetic leather skin simulant is mounted (Lorica Soft, Ehrlich Lederhandels GmbH, Germany). Lycra Soft synthetic leather has friction properties similar to human skin, and it has been widely used as simulated skin material [7, 9, 17]. Water, supplied by a precision syringe pump (BS-9006, Braintree Scientific, Inc., USA), is delivered to the skin simulant surface through a hole in the center of the skin simulant. This delivery strategy enables the intrinsic moisture management properties of the fabric test samples themselves to determine the absorption, spreading, and evaporation of the water delivered to the skin simulant. The testing system utilizes a motorized test stand (Torbal FTH100, Scientific Industries Inc., USA) to drive a rigid sample holder at a rate of 10 cm/min across the surface of the skin simulant. This causes a 12 cm × 12 cm fabric attached to the sample holder to move horizontally, without applied contact pressure, over the surface of a synthetic leather skin simulant. A precision force gauge (20 N × 0.005 N, Torbal FC20, Scientific Industries Inc., USA) measures the frictional force generated between the test fabric and skin simulant.

Schematic of the wet cling testing apparatus. Note: 1: syringe; 2: rigid sample holder frame; 3: fabric sample; 4: simulated skin; 5: test platform; 6: force gauge; 7: motorized test stand
The testing protocol proceeded as follows: a 12 cm × 12 cm fabric test sample is attached to the rigid sample holder with double-sided tape. The test commences with the initiation of water delivery to the skin simulant, marking the onset of sweating. The force gauge measures the frictional force generated as it pulls the sample holder with attached fabric a distance of 2 cm across the surface of the skin simulant. The dragging distance of 2 cm was chosen to represent the small movements between clothing and human body, such as flexing arms [18]. The force gauge then pushes the sample holder back to its original position on the skin simulant. The frictional force is measured only in the pulling direction. In the protocol, this cycle is repeated at ten-minute intervals over the course of a 60-min period during which the sweating system is kept on. The attachment of a flexible fabric sample onto a rigid sample holder allows the cyclic pulling and pushing. This procedure enables the measurement of changes in the wet cling frictional force with sweating time in a simple testing protocol. A fan placed above the fabric sample delivers a controlled airflow over the sample at an angle about 60 degrees during the test. All tests were conducted at 21.5 ± 1 °C, 65 ± 5% RH.
2.2 Test Materials
Seven polyester and cotton knit fabric constructions were studied using the wet cling tester (Table 1). P1, P2, P3, and P4 are 100% polyester knits. P1 and P2 are lightweight jersey constructions; however, P2 has a durable water repellent finish (DWR) to enable the effect of hydrophobicity on wet cling frictional force to be explored. P3 is a polyester interlock construction. P4 is a thicker polyester double knit. This sample enabled the effect of knit thickness and weight on wet cling friction force to be investigated. C1 and C2 are 100% cotton knit fabrics having different thickness and weight. Sample OW is a special proprietary fabric, a double-knit construction with hydrophilic fibers on the surface and less hydrophilic fibers on the skin side of the fabric. It is an example of a “one-way” wicking fabric, claimed to be capable of transferring liquid sweat from the skin side to the fabric’s outer surface. Because this sample is a commercially available proprietary product, and specific details of the fiber content or finish are not available. All fabric samples were preconditioned in a standard environmental condition (21.5 ± 1 °C, 65 ± 5% RH) for at least 12 h before testing.
2.3 Statistical Analysis
The statistical analysis was performed using JMP Pro 15 (SAS, Cary, NC, USA). The frication force of different samples was compared using one-way analysis of variance (ANOVA). If there were significant differences among the samples from ANOVA analysis, Tukey's honestly significant difference (HSD) would be conducted to perform a pairwise comparison to determine which two samples had significant difference. A p value of less than 0.05 was selected to indicate a significant difference.
3 Results and Discussion
3.1 Optimizing the Test Procedure
To optimize the wet cling testing protocol, a series of experiments was conducted to quantify the effects of the rate of water delivery to the skin simulant. Another series investigated the effects of air movement above the fabric test sample.
3.1.1 Influence of Sweating Rate on Wet Cling Force
To understand the influence of sweating rate on wet cling performance, water was delivered at 25 g/min and 15 g/min continuously for 60 min, respectively, for fabric sample P3 and C1. A water delivery rate of 25 g/min (1.5 L/h) for a human with a surface area of 1.8 m2 simulates sweat generation by a person performing an intensive workout; 15 g/min (0.9 L/h) is used to simulate sweat production in light activities [19].
Figure 2 shows the change in wet cling force measured over the 60-min sweating protocol at the two different water delivery rates to the skin simulant. The difference in friction force between sweating rate of 25 g/min and 15 g/min reached 0.92 N for P3 and 1.36 N for C1 after 60 min of sweating (p < 0.05). The response of the polyester and cotton knit materials chosen for this comparison is typical of fabrics capable of absorbing and wicking liquid moisture. These data show that only the sweating rate simulating profuse sweating associated with heavy exercise produces wet cling frictional forces in these fabrics. The inflection in the wet cling force observed after about 30–40 min (at the higher water delivery rate) indicates that profuse sweating is required to cause the onset of wet cling frictional force in these example materials. This finding suggests that wet cling may become a decisive factor in perceived comfort sensations only in conditions and materials that result in water saturation and build-up in the fabric skin interface. It confirms that wet cling frictional forces are absent in light or moderate work levels.

Friction force between fabrics and simulated skin with sweating time at different sweating rates (25 g/min vs. 15 g/min): a polyester fabrics and b cotton fabrics. Note: wind speed: 2 m/s; asterisks: significant difference (p < 0.05)
3.1.2 Influence of Wind Speed on Wet Cling Force
Figure 3 shows that the measured wet cling force is higher in still air testing conditions than when air is blown over the surface of the fabric test sample at 2.0 m/s. This finding applies to both the polyester and cotton knit materials. Further, the difference between the friction force with and without air movement at 50 min is significant, 0.51 N for P3 and 0.63 N for C1 (p < 0.05). We attribute this finding to the contribution of airflow to evaporation through the fabric, reducing the amount of liquid accumulation in the fabric/skin interface. It is interesting to note that the wet cling force increases throughout the 60-min sweating simulation when the test is conducted in the presence of air movement. On the other hand, the wet cling frictional force markedly decreases after 50 min when testing in still air. After 60 min of sweating in still air, P3 and C1 exhibit 0.74 N less friction force compared to the results measured in the windy condition (p < 0.05). This finding is consistent with research that found significant water accumulated in the fabric and skin interface can act as a lubricant, leading to a decrease in the friction force between saturated fabric and sweat-wetted skin [7]. However, it is important to consider that, even though the wet cling frictional force is smaller because of the lubricating effect of water accumulation in the skin-fabric system, the sweat-saturated fabric may nevertheless produce a strong negative sensation of wetness.

Friction force between fabrics and simulated skin over sweating time under different wind speeds (2 m/s vs. no wind): a polyester fabrics and b cotton fabrics. Sweating rate: 25 g/min; asterisks: significant difference (p < 0.05)
Based on these investigations of the effects of water deliver rates and air movement on wet cling force, our comparative studies of different fabrics were conducted to simulate sweat production in vigorous work (25 g/min). The wet cling force was measured in ten-minute intervals over the duration of a one-hour simulated sweating period. The environmental conditions were maintained at 21.5 ± 1 °C, 65 ± 5% RH, with a wind speed of 2 m/s. All the wet cling tests were performed in triple replicates.
3.2 Influence of Material Properties on Wet Cling Force
3.2.1 Basic Material Properties
Table 2 summarizes the moisture management properties of the study materials as measured by standard methods of moisture absorption rate and capacity, wicking, drying, and one-way moisture transport. These data show that the thin jersey knit polyester (P1) has a high moisture absorption rate, low moisture absorption capacity, fast drying and excellent wicking properties. The polyester sample treated to repel water (P2) has the same structure with P1, but with the expected inability to absorb or wick moisture. The interlock and double-knit polyester samples (P3 and P4) have a higher absorbent capacity than P1 due to their larger thickness and weight. Both cotton fabrics, C1 and C2, have good wicking properties; however, because C2 is a thick and heavy cotton fabric, this material exhibits a higher absorbent capacity than C1, the thin cotton fabric.
The proprietary one-way wicking fabric (OW) is a double-sided knit material. Vertical wicking data show that the fabric face side has better wicking properties than the skin side. It has excellent one-way transport property demonstrated by its high one-way transport index, and wetted radius on the skin side and face side of the fabric. Reversing the skin and face side of the fabric (OW-down) produces a 30 mm wetted radius on the top surface (skin side) and 0 mm wetting radius on the face side, resulting in a negative one-way transport index. This shows that liquid sweat will remain close to the skin if the skin and face side of OW fabric are reversed.
3.2.2 Influence of Fabric Thickness
Figure 4 shows the change of friction force of polyester knit fabrics (Fig. 4a) and cotton fabrics (Fig. 4b) against simulated skin over time. For thick fabrics P4 and C2, the friction force is relatively constant. This is because fabrics with high absorbent capacity absorb most of the liquid supplied, leaving little water on the skin surface. As a result, a consistently low friction force is observed. For medium thickness materials (C1 and P3), the friction force initially increases slowly with sweating time before rising dramatically after about 40-min of sweating. This is because after 40 min of sweating, the fabrics become partially saturated, and liquid water begins to emerge on the skin surface, as demonstrated by the dark wetted area in Fig. 5.

Friction force between fabric samples and simulated skin over sweating time: a polyester fabrics and b cotton fabrics. Sweating rate: 25 g/min; wind speed: 2 m/s; asterisks: significant difference (p < 0.05)

Local saturation observed on fabric P3 and C1 after sweating 40 min at 25 g/min with a wind speed of 2 m/s
By comparing cotton and polyester fabrics with a similar thickness (P3 vs. C1 and P4 vs. C2), it is apparent that cotton fabrics tend to show a higher wet cling force after prolonged sweating. At 60 min of sweating, C1 exhibits 0.56 N higher friction force than P3, and C2 is 0.18 N higher than P4 (p < 0.05). In this regard, it is significant that cotton fabrics have a lower one-way transport index than polyester fabrics (Table 2). As a result, more water may accumulate closer to skin interface, increasing the potential wet cling force.
3.2.3 One-Way Wicking Fabrics and Wet Cling
One-way wicking fabrics transfer water from the skin to the fabric outer surface as a result of the designed gradient of hydrophobicity, pore size, and other fabric features [20]. The OW sample in this study possesses excellent one-way transport property as indicated by the wetted radius data that shows the skin side has a wetted radius of 0 mm while the face side has 30 mm (Table 2). When putting fabric skin side onto the simulated skin (OW-up), the interface between fabric and skin remains dry, because liquid water emitted is transferred to the fabric’s outer surface. Even after 60-min intense sweating, the skin side is still relatively dry, as shown in Fig. 6. As a result, the friction force is very low during the 60-min sweating (Fig. 6).

Friction force between one-way wicking fabric (OW) and simulated skin over sweating time. OW-up: fabric face side is outwards; OW-down: fabric face side is downwards; sweating rate: 25 g/min; wind speed: 2 m/s; asterisks: significant difference (p < 0.05)
In comparison, if the fabric face side is placed against the simulated skin (OW-down), the friction force increases dramatically after 20 min into sweating and reaches a steady state at 40 min. The friction force difference reaches 1.76 N at 40 min (p < 0.05). This is because the inner fabric layer, as indicated by the wetted radius data in Table 2, absorbs liquid supplied. No wicking is observed on the outer side of the OW fabric if the fabric face side is against the skin. As a result, the friction force increases with sweating time because of the accumulation of liquid water on skin surface.
3.2.4 Influence of Durable Water Repellent Finishing
P1 and P2 have the same structure, except that P2 has water repellent finishing. Figure 7 shows the friction force between the fabrics and simulated skin with sweating time. For the thin fabric P1, the friction force reaches the maximum point around 40 min and then becomes stable. It is likely an equilibrium state is reached between evaporation and sweating. In contrast, P2 fabric has negligible friction force during the 1-h-long heavy sweating. This is consistent with another study that found hydrophobic fabrics possessed smaller adhesion forces, indicative of less wet cling [8]. Due to the inability of P2 to absorb or spread liquid moisture, large amounts of water were accumulated on the skin surface during testing (Fig. 7). When pulling or the fabric over the skin simulant during testing, no interaction between fabric and water was observed. This indicates that the fabric’s surface energy can affect the friction force on wetted skin. It is worth noting that P2 with minimal friction force could help reduce wet cling perception. This does not mean this fabric is comfortable. The large amount of water accumulated on the skin will likely cause unfavorable wetness perception.

Influence of durable water repellent finishing on the friction force between fabric samples and simulated skin over sweating time. Sweating rate: 25 g/min; wind speed: 2 m/s; asterisks: significant difference (p < 0.05)
3.3 Correlation Between Fabric Properties with Friction Force
Correlation analysis between fabric properties and friction force (average and maximum) was conducted to understand how fabric properties affect friction force (Table 3). The data set includes all fabrics except P2 and OW, tested with a sweating rate of 25 g/min at a wind speed of 2 m/s. No significant correlations were observed (p < 0.05). This analysis provides two important insights: it shows the complexity of wet cling phenomena. This is because many fabric properties can collectively affect the amount of water accumulated on the skin, such as drying time, wicking ability, one-way transport index, absorbent capacity, etc., which would affect wet cling perception. In addition, the wet cling force also depends on fabric surface hydrophobicity. This demonstrates the value of the developed wet cling tester as no current moisture management testing methods could predict the wet cling perception.
4 Conclusion
We have developed and demonstrated a test method that efficiently measures the wet cling properties of fabrics. This device’s most significant advantage is that it can evaluate the change of wet cling performance with sweating time through a simple test. In addition, it can assess the effect of different textile materials, environmental conditions, and sweating rate on the friction force between simulated skin and fabric. It shows water absorbent capacity, one-way transport property, water repellent finishing, sweating time, wind speed, and sweating rate can affect wet cling performance. The findings provide new avenues for researchers to develop advanced fabrics with good wet cling performance by manipulating one-way wicking transfer property, drying rate, absorbent capacity, surface energy, etc. For the first time, the influence of sweating time on wet cling performance could be precisely evaluated. This promising device has great potential as a tool to assist the development of intimate clothing, active wear, hygiene products, and protective clothing.
In the future, we plan to improve the device by creating more sweating holes. In addition, the magnitude of human body and clothing movements is dependent on fabric properties, activity level, clothing design, body locations, etc. The influence of friction distance on wet cling force would be investigated by changing dragging distances. The quantitative relationship between friction force and scale of wet cling perception is unknown. This critical information will be collected during our future forearm wear trial. The wet cling tester can only capture one aspect of the comfort properties associated with wet fabrics. A device that could provide a comprehensive comfort index on wet fabrics would be desired, including cooling perception, wet cling, wetness, etc.
References
H. Gao, A.S. Deaton, X. Fang, K. Watson, E.A. DenHartog, R. Barker, Text. Res. J. 92, 219 (2022)
H. Gao, A.S. Deaton, R. Barker, X. Fang, K. Watson, Int. J. Occup. Saf. Ergon. (2022). https://doi.org/10.1080/10803548.2022.2058746
M. Raccuglia, K. Pistak, C. Heyde, J. Qu, N. Mao, S. Hodder, G. Havenith, Text. Res. J. 88, 2155 (2018)
P. Kenins, Text. Res. J. 64, 722 (1994)
B.A. McGregor, J. Stanton, J. Beilby, J. Speijers, D. Tester, Text. Res. J. 85, 912 (2015)
L. Vilhena, A. Ramalho, Lubricants 4, 6 (2016)
K.-P.M. Tang, K.-H. Chau, C.-W. Kan, J.-T. Fan, IEEE Access 6, 24777 (2018)
L. Lou, Y. Qiu, F. Ji, X. Zhu, Text. Res. J. 88, 108 (2018)
E. Bertaux, E. Le Marec, D. Crespy, R. Rossi, D. Hegemann, Surf. Coat. Technol. 204, 165 (2009)
A. Wong, Y. Li, P. Yeung, P. Lee, Text. Res. J. 73, 31 (2003)
M. Raccuglia, B. Sales, C. Heyde, G. Havenith, S. Hodder, Appl. Ergon. 73, 33 (2018)
R. Jiang, Y. Wang, Perception 49, 1311 (2020)
K.-P.M. Tang, K.-H. Chau, C.-W. Kan, J.-T. Fan, R. Soc, Open Sci. 5, 180860 (2018)
K.-P. Maggie, K.-H. Chau, C.-W. Kan, J.-T. Fan, Fibers Polym. 19, 2418 (2018)
E. Classen, in Advanced characterization and testing of textiles. ed. by P. Dolez, O. Vermeersch, V. Izquierdo (Woodhead Publishing, Cambridge, 2018), p.59
F. Ji, Y.P. Qiu, J.F. Xie, S.Y. Sun, Adv. Mat. Res. 627, 476 (2013)
D.J. Cottenden, A.M. Cottenden, J. Mech. Behav. Biomed. Mater 28, 410 (2013)
R. Ketola, V. Mishra, A. Kiourti, Sensors 20, 3735 (2020)
K.A. Barnes, M.L. Anderson, J.R. Stofan, K.J. Dalrymple, A.J. Reimel, T.J. Roberts, R.K. Randell, C.T. Ungaro, L.B. Baker, J. Sports Sci. 37, 2356 (2019)
Y.-Q. Xiao, C.-W. Kan, Coatings 12, 301 (2022)
AATCC-TM 197 (2018) "Vertical wicking of textiles", American Association of Textile Chemists and Colorists
AATCC-TM 201 (2012) "Drying rate of fabrics: heated plate method", American Association of Textile Chemists and Colorists
S. Yoo, R.L. Barker, Text. Res. J. 74, 995 (2004)
AATCC-TM 195 (2012) "Liquid moisture management properties of textile fabrics", American Association of Textile Chemists and Colorists
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no conflict of interest.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Gao, H., Deaton, A.S. & Barker, R.L. A Novel Method for Measuring the Wet Cling Properties of Textiles. Fibers Polym 24, 187–194 (2023). https://doi.org/10.1007/s12221-023-00074-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12221-023-00074-2