
Abstract
In this paper, sufficient conditions for global asymptotic stability of a stochastic non-autonomous Lotka–Volterra competitive system with infinite delays are established. Some recent results are improved and generalized.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In this paper we consider the global asymptotic stability (or GAS for short) of the positive solution of the following stochastic competitive system with infinite delays
where \(r_i(t),~a_i(t)\ge 0,~b_{ij}(t)\ge 0\), \(\sigma _{ik}(t)\) and \(c_{ij}(t)\ge 0\) are bounded and continuous functions on \([0,+\infty )\), \(1\le i,j\le n,~1\le k\le m\); \((B_1(t),\ldots ,B_m(t))^T\) is an \(m\)-dimensional Wiener process defined on a complete probability space \((\Omega , \mathcal {F}, \{\mathcal {F}_t\}_{t\ge 0}, \mathcal {P})\); \(\tau _{ij}(t)\ge 0\) is a bounded and continuously differentiable function on \([0,+\infty )\) with \(\bar{\tau }:=\min _{1\le i,j\le n}\inf _{t\ge 0} (1-\dot{\tau }_{ij}(t))>0\), \(\dot{\tau }_{ij}(t)=d\tau _{ij}(t)/dt\); \(\nu _{ij}(\theta )\) is a probability measure on \((-\infty ,0]\), \(1\le i,j\le n\). \(c_{ij}(t)\int _{-\infty }^0 x_j(t+\theta ) d\nu _{ij}(\theta )\) means the effect of the infinite delay of species \(x_j\) on the species \(x_i\) (see e.g. [20]). Here we use an m-dimensional Wiener process not a standard Wiener process to describe the environmental perturbations because the noises on \(r_i\) (\(1\le i\le n\)) may or may not correlate to each other.
GAS of the positive solution of population models has long been and will continue to be a dominant theme in biomathematics. Since in the natural world, many environmental fluctuations (for example, variation in intensity of sunlight, temperature, water level, etc.) can affect the growth of species [1], several scholars have considered the GAS of stochastic population systems. Jiang et al. did pioneering work in [2], where the authors investigated the GAS of the following stochastic logistic model
where \(r(t), a(t)\) and \(\sigma (t)\) are continuous \(T\)-periodic functions, and \(a(t)>0\), \(r(t)>0\), \(B(t)\) is a standard Wiener process. The authors proved that if \(\min _{t\in [0,T]}r(t)>\max _{t\in [0,T]}\sigma ^2(t),\) then system (2) is GAS. Then these results were extended and improved by Li and Mao in [3], where the authors considered the following stochastic Lotka–Volterra competitive system
where \(b_{ij}(t)>0,~r_i(t),~\sigma _i(t)~(i,j=1,\ldots ,n)\) are continuous and bounded functions on \([0,+\infty )\), and \(B_{i}(t)~(i =1,\ldots ,n)\) are independent standard Wiener processes. Li and Mao [3] proved that if for every \(1\le i\le n\),
then model (3) is GAS. GAS of a stochastic competitive Lotka–Volterra system with Markovian switching was considered by Hu and Wang [4]. Bao et al. [5] established the sufficient conditions for GAS of a stochastic Lotka–Volterra competitive system with Lévy jumps. Liu and Wang [6, 7] investigated the GAS of stochastic predator-prey models and stochastic cooperative models respectively. Mandal [8] considered the GAS of a stochastic three-species competitor-competitor-cooperative model.
However, time delays should be incorporated into biological models to denote resource regeneration times, reaction times, feeding times, maturation periods, etc. [9]. At the same time, in the nature world it is a common phenomena that some species compete for limited resources. Therefore it is important to consider the GAS of stochastic competitive models with time delay. To the best of our knowledge, no result of this aspect has been reported. The aim of this paper is to investigate this problem. In Sect. 2, we establish our main results. Sufficient conditions for GAS of model (1) are established. Some recent results are extended and improved. In Sect. 3, a simulation figure is introduced to illustrate the main results. The conclusions are given in the last section.
2 Main results
For the sake of convenience, we let \(R^n_+=\{x\in R^n:x_i>0~\text{ for } \text{ all }~1\le i\le n\}\) and denote \(BC((-\infty ,0],R_+^n)\) the family of bounded and continuous functions from \((-\infty ,0]\) to \(R_+^n\) with the norm \(||\xi ||=\sup _{\theta \le 0}|\xi (\theta )|\). Define \(\hat{f}=\sup _{t\ge 0}f(t)\), \(\check{f}=\inf _{t\ge 0}f(t)\). For the following stochastic differential equation
define
where \(V\in C^{2,1}(R^n\times R_+;R_+)\).
Definition 1
Model (1) is said to be globally asymptotically stable (or globally attractive) if for any two solutions \(x(t)=(x_1(t),\ldots ,x_n(t))^T\) and \(y(t)=(y_1(t),\ldots ,y_n(t))^T\) of (1) with initial data \(x(\theta )\in BC((-\infty ,0],R_+^n)\) and \(y(\theta )\in BC\left( (-\infty ,0],R_+^n\right) \) respectively, \(\lim \limits _{t\rightarrow +\infty }\sum _{i=1}^n|x_i(t)-y_i(t)|=0\) a.s.
Lemma 2
For any initial value \(x(\theta )\in BC\left( (-\infty ,0],R_+^n\right) \), there is a unique global positive solution \(x(t)\) on \(t\in R\) to Eq. (1) almost surely (a.s.).
Proof
The proof is motivated by [10–12]. Note that the coefficients of Eq. (1) are locally Lipschitz continuous, then for any initial data \(x(\theta )\in BC\left( (-\infty ,0],R_+^n\right) \), Eq. (1) has a unique local solution \(x(t)\) on \(t\in (-\infty ,\tau _e)\), where \(\tau _e\) represents the explosion time [13]. To complete the proof, we only need to prove that \(\tau _e=+\infty \). Let \(k_0>0\) be sufficiently large such that each component of \(x(0)\) lying within \([1/k_0,k_0]\). For every integer \(k>k_0\), define
Set \(\tau _\infty =\lim \limits _{k\rightarrow +\infty }\tau _k\). Then \(\tau _\infty \le \tau _e~a.s.\) To complete the proof all we need to show is that \(\tau _\infty =\infty \). If this statement is not true, we can find positive constants \(T\) and \(\varepsilon \in (0,1)\) such that \(\mathcal {P}\{\tau _\infty <T\}>\varepsilon .\) Therefore we can find an integer \(k_1\ge k_0\) such that
Define
where
\(\phi _{ji}^{-1}(t)\) is the inverse function of \(\phi _{ji}(t)=t-\tau _{ji}(t).\) Then we have
where
where \(c_1=\displaystyle \max _{1\le i\le n}\widehat{|r_i|}+ \max _{1\le i\le n}\widehat{a_i}\), \(c_2= 0.5\displaystyle \sum _{i=1}^n\sum _{k=1}^m\widehat{\sigma ^2_{ik}} +\max _{1\le i\le n}\widehat{|r_i|}\). In the proof of the last inequality, we have used that
It then follows that
An application of the basic inequality \(u\le 2[u-1-\ln u]+2\) on \(u>0\), one can see that
where \(c_3=V_1(0)+2(n\hat{b}/\bar{\tau }+n\hat{c}+c_1)T+c_2T\). It then follows from Gronwall’s inequality that
The following proof is standard and hence is omitted. \(\square \)
Remark 3
There are three terms in \(V_1(t)\). The first two terms are introduced for eliminating the delay terms.
Lemma 4
For arbitrary \(p>1\), there exists a constant \(F=F(p)>0\) such that
Proof
Define \(V_2(x)=\sum _{i=1}^nx_i^{2p}\). Then
It then follows that
where
It then follows from Hölder’s inequality (see e.g. [14], page 5) that
Let \(z(t)=\sum _{i=1}^nE\left[ x_i^{2p}(t)\right] \), then one can see that
According to the standard comparison theorem, we obtain
This completes the proof. \(\square \)
Lemma 5
Suppose that \(x(t)=(x_1(t),\ldots ,x_n(t))^T\) is the solution of model (1) with initial data \(x(\theta )\in BC\left( (-\infty ,0],R_+^n\right) \), then for each \(1\le i\le n,\) almost every sample path of \(x_i(t)\) is uniformly continuous.
Proof
According to (7), we can find a \(T>0\) such that \(\sum _{i=1}^nE\left( x_i^{2p}(t)\right) \le 1.5F\) for all \(t\ge T.\) On the other hand, since \(\sum _{i=1}^nE\left( x_i^{2p}(t)\right) \) is continuous and \(x(\theta )\) is bounded, then we can find a \(\tilde{F}>0\) such that \(\sum _{i=1}^nE\left( x_i^{2p}(t)\right) \le \tilde{F}\) for \(t\le T.\) Let \(L=\max \{1.5F,\tilde{F}\}\), then one can see that
Note that Eq. (1) is equivalent to the following equation
For \(p>2\), compute that
On the other hand, an application of of the moment inequality for stochastic integrals (see e.g. [14], Page 69) and Hölder’s inequality, one can observe that for \(0\le t_1\le t_2\),
Consequently, for \(0<t_1<t_2<\infty ,~t_2-t_1\le 1,~1/p+1/q=1,~p>2\), we get
where \(L_2=\max \{L_1,m^{p-1}\sum _{k=1}^m[\widehat{\sigma _{i k}^2}]^pL^{0.5}\}\). According to the Kolmogorov continuity criterion (see e.g. [15]), we obtain that almost every sample path of \(x_i(t)\) is uniformly continuous.
Lemma 6
[16] If \(f\) is a non-negative, uniformly continuous and integrable function defined on \(t\ge 0\), then \(\lim \limits _{t\rightarrow +\infty }f(t)=0\).
Theorem 7
Suppose that there are positive constants \(\gamma _1,\ldots ,\gamma _n\) and \(\lambda \) such that for all \(1\le i\le n\) and \(t\ge 0\),
then Eq. (1) is GAS.
Proof
Define
Then we have
At the same time
Define \(V_6(t)=V_3(t)+V_4(t)+V_5(t).\) According to (9–11), one can get
That is to say
In other words,
Nota that \(V_6(t)\ge 0\), then \(|x_i(t)-y_i(t)|\) is integrable on \([0,+\infty )\). By Lemmas 5 and 6, we obtain the required assertion. \(\square \)
For Eq. (3), by Theorem 7, we obtain the following result.
Corollary 8
Suppose that there are positive constants \(\gamma _1,\ldots ,\gamma _n\) and \(\lambda >0\) such that for all \(1\le i\le n\) and \(t\ge 0\),
then model (3) is GAS.
Remark 1
Let us compare our Corollary 8 with the results in Li and Mao [3]. Clearly, (12) is weaker than (4). For example, consider the following model
Compute that \(\min _{t\ge 0}[b_{11}(t)-b_{21}(t)]=-0.03<0, ~b_{22}(t)-b_{12}(t)\equiv 0.1.\) It is easy to see that (4) does not hold. Then the results in [3] can not be used. However, choose \(\gamma _1=1.1,~\gamma _2=1,\) then
It then follows from our Corollary 8 that model (13) is GAS.
3 Numerical simulations
In this section, we introduce a numerical figure to validate the main results by using the Milstein method (see e.g., [17]). For the sake of simplicity, we choose \(n=m=2\), \(b_{12}(t)=b_{21}(t)=c_{11}(t)=c_{22}(t)=0\), \(\sigma _{21}(t)=0,\) \(\nu _{ij}(\theta )=e^{\theta }\), \(\theta \in (-\infty ,0],~1\le i,j\le 2.\) Hence, Eq. (1) becomes
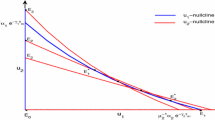
In Fig. 1, we choose \(r_1(t)=0.4+0.1\sin t\), \(r_2(t)=0.5+0.02\sin t\), \(a_1(t)\equiv 0.7\), \(a_2(t)\equiv 0.6\), \(b_{11}(t)\equiv 0.3\), \(b_{22}(t)\equiv 0.15\), \(c_{12}(t)\equiv 0.2\), \(c_{21}(t)\equiv 0.41\), \(\tau _{11}(t)=\tau _{22}(t)=0.2t\), \(\sigma _{11}(t)=\sigma _{12}(t) \equiv 0.2,~\sigma _{22}(t)\equiv 0.3\). Let \(\gamma _1=1\), \(\gamma _2=0.7\), then
Then by Theorem 7, model (14) is GAS. Figure 1 confirms this.

Solution of model (14) for \(r_1(t)=0.4+0.1\sin t\), \(r_2(t)=0.5+0.02\sin t\), \(a_1(t)\equiv 0.7\), \(a_2(t)\equiv 0.6\), \(b_{11}(t)\equiv 0.3\), \(b_{22}(t)\equiv 0.15\), \(c_{12}(t)\equiv 0.2\), \(c_{21}(t)\equiv 0.41\), \(\tau _{11}(t)=\tau _{22}(t)=0.2t\), \(\sigma _{11}(t)=\sigma _{12}(t)\equiv 0.2,~\sigma _{22}(t)\equiv 0.3\), step size \(\Delta t=0.001\), initial data \(x_1(\theta )=0.8e^\theta ,~x_2(\theta )=0.3e^\theta ,\) \(y_1(\theta )=0.6e^\theta ,~y_2(\theta )=0.1e^\theta , \theta \in (-\infty ,0]\)
4 Conclusions
This paper is concerned with a stochastic non-autonomous Lotka–Volterra competitive system with infinite delays. Sufficient conditions for GAS are obtained. Some recent results are extended and improved. In recent years, GAS of the Lotka–Volterra competitive model with time delays has been investigated extensively (see e.g. [18–33] and the references cited therein), but mainly in deterministic case. This paper is the first one, to the best of our knowledge, to consider the stochastic case.
Some interesting problems deserve further investigation. It is of interest to consider the permanence of model (1). Another problem of interest is to consider other environmental noises, for example, telephone noises (see e.g. [4]) and Lévy jump noises (see e.g. [5]).
References
May, R.M.: Stability and Complexity in Model Ecosystems. Princeton University Press, NJ (2001)
Jiang, D.Q., Shi, N.Z., Li, X.Y.: Global stability and stochastic permanence of a non-autonomous logistic equation with random perturbation. J. Math. Anal. Appl. 340, 588–597 (2008)
Li, X., Mao, X.: Population dynamical behavior of non-autonomous Lotka–Volterra competitive system with random perturbation. Discret. Contin. Dyn. Syst. 24, 523–545 (2009)
Hu, G., Wang, K.: Stability in distribution of competitive Lotka–Volterra system with Markovian switching. Appl. Math. Model. 35, 3189–3200 (2011)
Bao, J., Mao, X., Yin, G., Yuan, C.: Competitive Lotka–Volterra population dynamics with jumps. Nonlinear Anal. 74, 6601–6616 (2011)
Liu, M., Wang, K.: Dynamics of a two-prey one-predator system in random environments. J. Nonlinear Sci. 23, 751–775 (2013)
Liu, M., Wang, K.: Population dynamical behavior of Lotka–Volterra cooperative systems with random perturbations. Discret. Contin. Dyn. Syst. 33, 2495–2522 (2013)
Mandal, P.S.: Characterization of positive solution to stochastic competitor-competitor-cooperative model. Electron. J. Differ. Equ. 88, 1–13 (2013)
Ruan, S.: Delay differential equations in single species dynamics. In: Arino, O., et al. (eds.) Delay Differential Equations and Applications, pp. 477–517. Springer, New York (2006)
Wan, L., Zhou, Q.: Stochastic Lotka–Volterra model with infinite delay. Stat. Probab. Lett. 79, 698–706 (2009)
Vasilova, M., Jovanović, M.: Stochastic Gilpin–Ayala competition model with infinite delay. Appl. Math. Comput. 217, 4944–4959 (2011)
Xu, Y., Wu, F., Tan, Y.: Stochastic Lotka–Volterra system with infinite delay. J. Comput. Appl. Math. 232, 472–480 (2009)
Wei, F., Wang, K.: The existence and uniqueness of the solution for stochastic functional differential equations with infinite delay. J. Math. Anal. Appl. 331, 516–531 (2007)
Mao, X.: Stochastic Differential Equations and Applications. Horwood Publishing, Chichester (1997)
Karatzas, I., Shreve, S.E.: Brownian Motion and Stochastic Calculus. Springer, Berlin (1991)
Barbalat, I.: Systems dequations differentielles d’osci d’oscillations nonlineaires. Rev. Roum. Math. Pures Appl. 4, 267–270 (1959)
Higham, D.J.: An algorithmic introduction to numerical simulation of stochastic diffrential equations. SIAM Rev. 43, 525–546 (2001)
Gopalsamy, K.: Global asymptotic stability in Volterra’s population systems. J. Math. Biol. 19, 157–168 (1984)
Gopalsamy, K.: Stability and Oscillations in Delay Differential Equations of Population Dynamics. Kluwer Academic, Dordrecht (1992)
Kuang, Y.: Delay Differential Equations with Applications in Population Dynamics. Academic Press, Boston (1993)
Kuang, Y., Smith, H.L.: Global stability for infinite delay Lotka–Valterra type systems. J. Differ. Equ. 103, 221–246 (1993)
Lu, Z., Takeuchi, Y.: Permanence and global attractivity for Lotka–Volterra systems with delay. Nonlinear Anal. 22, 847–856 (1994)
Wang, L., Zhang, Y.: Global stability of Volterra–Lotka systems with delay. Differ. Equ. Dyn. Syst. 3, 205–216 (1995)
Bereketoglu, H., Gyori, I.: Global asymptotic stability in a nonautonomous Lotka–Volterra type system with infinite delay. J. Math. Anal. Appl. 210, 279–291 (1997)
He, X., Gopalsamy, K.: Persistence, attractivity, and delay in facultative mutualism. J. Math. Anal. Appl. 215, 154–173 (1997)
Ahmad, S., Lazer, A.C.: Average conditions for global asymptotic stability in a nonautonomous Lotka–Volterra system. Nonlinear Anal. 40, 37–49 (2000)
Teng, Z., Yu, Y.: Some new results of nonautonomous Lotka–Volterra competitive systems with delays. J. Math. Anal. Appl. 241, 254–275 (2000)
Saito, Y.: The necessary and sufficient condition for global stability of a Lotka–Volterra cooperative or competition system with delays. J. Math. Anal. Appl. 268, 109–124 (2002)
Teng, Z.: Nonautonomous Lotka–Volterra systems with delays. J. Differ. Equ. 179, 538–561 (2002)
Zhao, J., Jiang, J., Lazer, A.C.: The permanence and global attractivity in a nonautonomous Lotka–Volterra system. Nonlinear Anal. Real World Appl. 5, 265–276 (2004)
Faria, T.: Sharp conditions for global stability of Lotka–Volterra systems with distributed delays. J. Differ. Equ. 246, 4391–4404 (2009)
Hu, H., Wang, K., Wu, D.: Permanence and global stability for nonautonomous N-species Lotka–Valterra competitive system with impulses and infinite delays. J. Math. Anal. Appl. 377, 145–160 (2011)
Zhang, L., Teng, Z.: N-species non-autonomous Lotka–Volterra competitive systems with delays and impulsive perturbations. Nonlinear Anal. Real World Appl. 12, 3152–3169 (2011)
Acknowledgments
The authors thank the editor and reviewers for those valuable comments and suggestions. The authors also thank the National Natural Science Foundation of China (Nos. 11301207 and 11171081), Natural Science Foundation of Jiangsu Province (No. BK20130411), Natural Science Research Project of Ordinary Universities in Jiangsu Province (No. 13KJB110002), Qing Lan Project of Jiangsu Province (2014).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Yao, Q., Liu, M. Global asymptotic stability of stochastic competitive system with infinite delays. J. Appl. Math. Comput. 50, 93–107 (2016). https://doi.org/10.1007/s12190-014-0860-8
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12190-014-0860-8