
Abstract
Generalist consumers commonly coexist in many ecosystems. Yet, eco-evolutionary theory poses a problem with this observation: generalist consumers (usually) cannot coexist stably. To provide a solution to this theory-observation dissonance, we analyzed a simple eco-evolutionary consumer resource model. We modeled consumption of two nutritionally interactive resources by species which evolve their resource encounter rates subject to a tradeoff. As shown previously, consumers can ecologically coexist through tradeoffs in resource encounter rates; however, this coexistence is evolutionary unstable. Here, we find that nutritional interactions between resources and the shape of acquisition tradeoffs produce very similar evolutionary outcomes in isolation. Specifically, they produce evolutionarily stable communities composed either of two specialists (concave acquisition tradeoff or antagonistic nutrition) or a single generalist (convex acquisition tradeoff or complementary nutrition). Thus, the generalist-coexistence problem remains. However, the combination of nonlinear resource acquisition tradeoffs with nonlinear resource nutritional relationships creates selection forces that can push and pull against each other. Ultimately, this push-pull dynamic can stabilize the coexistence of two competing generalist consumers—but only when we coupled a convex acquisition tradeoff with antagonistic nutrition. Thus, our model here offers some resolution to the generalist-coexistence problem in eco-evolutionary, consumer-resource theory.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
How do so many generalists coexist in communities (Beaver 1979; Freeland 1991; Polis 1991; Reagan and Waide 1996; Novotny and Basset 2005)? This fundamental question highlights a discrepancy between evolutionary theory and nature. Mathematically, species coexistence readily arises through niche specialization (MacArthur 1970, 1972; Huston 1994). For instance, species can certainly coexist if they completely diverge in their resource use. Essentially, specialist species do not interact—hence, they can coexist—if their resource niches do not overlap. Evolutionarily, resource competition can drive character displacement, providing a mechanism underlying specialization (Brown and Wilson 1956; Lawlor and Maynard Smith 1976). Yet, this specialization mechanism does not resolve the problem: in nature, coexisting generalist competitors abound. Ecological theory does provide a roadmap to understand competitive coexistence of generalists (Tilman 1980, 1982; Chesson 2000). From a resource consumption perspective, tradeoffs in minimal resource requirements (R*) and stipulations about the strength of intraspecific vs. interspecific competition (via consumption/impact vectors) create opportunities for coexistence of generalists. Thus, through purely ecological mechanisms, tradeoffs in resource use (etc.) can at least partially explain coexistence of generalists.
However, natural selection creates an important problem for this resource-based, ecological explanation for coexistence of generalists. Except in the unlikely case of perfect resource substitution, evolution by natural selection produces either character convergence (nutritionally complementary resources, Abrams 1987) or divergence (nutritionally antagonistic resources). Complementary or essential resources should promote complete character convergence because the optimal generalist consumer, enjoying synergistic nutritional benefits, can deplete resources to lower levels than required for specialists. Since evolution forces consumers into a single, optimal resource consumption strategy, character convergence for these resources degrades diversity. On the other hand, antagonistic resources can lead to character divergence. Due to the nutritional penalty for consuming both resources, a generalist consumer leaves behind enough resources for more specialized strategies to invade and outcompete it. Therefore, antagonistic resources can produce divergent selection, likely creating resource specialization again. Depending on the nutritional interaction of the resources, then, evolutionarily stable communities become either composed of a single generalist or two-specialist consumers but not two coexisting generalists. Thus, natural selection undermines fitness-stabilizing mechanisms of ecological coexistence of generalists via resource competition.
A possible solution appears in several models of this problem, but it requires some assumptions that limit its scope (Fox and Vasseur 2008; Vasseur and Fox 2011). Competition for two essential resources can support ecological and evolutionary coexistence of two consumers (Fox and Vasseur 2008). For example, fixed differences in nutritional requirement ratios can enable evolutionarily stable coexistence of generalists with differing resource uptake. This coexistence scenario is somewhat restrictive, however, since it requires fixed differences in traits that govern fitness of the competitors. This assumption may hold in some instances. For example, genetic diversity in some traits may be non-existent or reduced relative to other traits (i.e., an organism’s behavior may evolve more easily than its physiology). However, in this article, we assume that all differences in fitness-governing traits among species reflect evolution by natural selection. In other words, differences between species arise as an emergent property of the evolutionary process. Once we assume that all trait differences between competitors are adaptive, the original problem re-emerges. Evolutionarily stable communities only become composed of either one generalist or two specialists: the generalist-coexistence problem remains.
Here, we pursue another explanation for evolutionary coexistence of competing generalists. Specifically, we focus on tradeoffs in acquisition of two resources. These tradeoffs can also determine the structure of evolutionarily stable communities (Zu and Wang 2013; Rueffler et al. 2006; Abrams 2006). Phenotypically, a tradeoff in resource acquisition means that elevation of acquisition rate of one resource necessarily decreases acquisition of the other. However, the shape of the resource acquisition matters greatly. In general, tradeoffs come in three shapes—concave, linear, and convex. Given equal amounts of two resources, a concave tradeoff means that a generalist consumes less resources (combined) than a specialist on either resource. With a linear tradeoff, generalists and specialists consume equal amounts. Finally, with a convex tradeoff, generalists consume more resources in aggregate than specialists. These different tradeoff functions could arise for various reasons. For example, temporal or spatial covariation of resources could influence foraging efficiency of specialists or generalists. Additionally, a nonlinear tradeoff could arise when different resources require different foraging strategies.
Tradeoff shape matters because it influences the outcome of selection (Levins 1968; de Mazancourt and Dieckmann 2004; Rueffler et al. 2004; Kisdi 2006; Zu and Wang 2013). Most verbal arguments along with some previous theoretical research assume a linear tradeoff between foraging rates on two resources (Fox and Vasseur 2008; Vasseur and Fox 2011). This assumption likely limits insights into evolutionary coexistence of competitors. Consider substitutable resources (i.e., those with no nutritional interaction). With such resources, the outcome of selection depends upon the shape of the resource acquisition tradeoff (Abrams 2006; Rueffler et al. 2006). For example, a concave tradeoff allows specialists to deplete resources such that generalists cannot invade. Likewise, with a convex tradeoff, a generalist reduces resources to a level where specialists cannot invade. Therefore, the effect of nutritional interaction (complementary, substitutable, antagonistic) upon evolutionary outcomes depends upon the shape of an acquisition tradeoff (convex, linear, or concave). Yet, theory that combines resource nutritional interaction and resource acquisition tradeoffs remains surprisingly underdeveloped. Here, we focus on this gap by integrating these two facets of consumer fitness.
In the current article, we demonstrate that an interaction between resource nutritional interaction and resource acquisition tradeoff shape can allow for the evolutionarily stable coexistence of generalists. We analyze a simple consumer-resource model with a flexible tradeoff function and flexible resource nutritional interaction function. The consumers in our model only differ in resource acquisition ability, which is the trait subject to selection. This model structure allows us to consider a broad spectrum of eco-evolutionary possibilities: we can combine antagonistic, substitutable, or complementary resource nutritional interactions along with concave, linear, or convex resource acquisition tradeoff shapes. We demonstrate how both the ecological (resource nutritional interaction) and evolutionary (tradeoff shape) components alone produce evolutionarily stable communities composed of either a single generalist or two-specialist species. Thus, neither nonlinearities in resource nutritional interaction nor those in acquisition tradeoff shape explain the evolutionarily stable coexistence of two generalists. However, the interaction between resource nutritional interaction and evolutionary tradeoff shape produces novel emergent properties that neither predicts alone. Importantly, the evolutionarily stable coexistence of two generalist species becomes possible (as shown by Zu and Wang 2013 but using a more complicated, nonlinear, and phenomenological tradeoff function). However, this outcome requires that competitors consume nutritionally antagonistic resources and evolve under a convexly shaped tradeoff in resource acquisition. With this arrangement, there is a push and pull between the divergent selective effects of antagonistic resources and the convergent selective effects of a convex acquisition tradeoff. These conflicting evolutionary pressures ultimately stabilize the coexistence of two generalists. Thus, under somewhat restrictive conditions, we show how generalist competitors can coexist on both ecological and evolutionary time scales.
Model description
Our eco-evolutionary model inserts a basic consumer-resource model (describing the ecology) into an evolutionary game theoretic model. We first describe the underlying ecology and then layer in the evolutionary framework. The evolutionary model allows ecological characteristics (traits) of the population to evolve. Furthermore, both ecological and evolutionary constraints become important in the subsequent evolutionary dynamics. Therefore, we highlight the important ecological constraints (resource relationships) and evolutionary constraints (evolutionary tradeoff shape) along the way (Fig. 1).

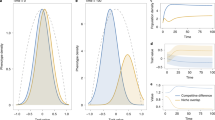
Key building blocks of the model. a Different types of nutritional interactions (β) of resources 1 (R 1) and 2 (R 2), as shown with Zero Net Growth Isoclines (ZNGIs) for a consumer. The ZNGI shows the densities of the two resources required for population subsistence. Resources can be antagonistic (β < 0), substitutable (β = 0), or complementary (β > 0). If resources are strongly antagonistic (β < −b/m), the ZNGI can take on a positive slope (not shown). b Different shapes of a resource acquisition tradeoff (α) between encounter rates on the two resources. The tradeoff shape is convex (α > 1), linear (α = 1), or concave (α < 1)
Ecological model
We describe the ecological dynamics with a basic consumer resource model (parameter definitions in Table 1). Consumer j’s growth rate is given by:
The expression in brackets (Eq. 1) is the per capita growth rate of the consumer. The per capita growth rate is birth rate (first term) minus per capita death rate (m j ); it equates to fitness and thus fundamentally links ecological and evolutionary dynamics. The levels of resources and the consumer’s ability to harvest and convert (b j ) the resources into new individuals influence per capita birth rate. Consumer feeding follows a linear functional response, where a 1j and a 2j are the encounter rates of consumers on resources 1 and 2, respectively. Furthermore, the rate at which consumers feed on two resources (R 1 and R 2) influences consumer birth rate in both additive (first two terms in parentheses) and interactive (last term) ways. The β parameter controls the strength and type of nutritional interaction between resources via the shape of the consumer’s Zero Net Growth Isocline (ZNGI) (Fig. 1). A ZNGI delineates combinations of resources 1 and 2 yielding zero growth rate of the consumer (i.e., dN i /dt = 0; Tilman 1982). If β is zero, resources are nutritionally substitutable (i.e., the nullcline is linear). When β > 0, resources are nutritionally complementary, i.e., consumers require less resources when resources are consumed together. If β < 0, resources are nutritionally antagonistic, meaning that consumer’s require more resources when resources are consumed together.
The dynamics of resources 1 and 2, respectively, are given by:
Following Tilman (1980), we model resource growth in the absence of consumption with a chemostat dynamic. S 1 and S 2 are the supply points of resources 1 and 2, respectively, in the absence of consumption, and d 1 and d 2 are the chemostat flow rates. For mathematical tractability, we assume that d 1 = d 2 and S 1 = S 2. These assumptions mean that both resources have identical growth dynamics apart from depletion due to consumption (note that this assumption does not affect the qualitative results we present). Resource depletion (second term on the right hand side of Eqs. 2 and 3) sums total consumption by each species.
In this ecological model, at most two consumers can coexist at equilibrium. Consumers can only coexist via tradeoffs in their encounter (consumption) rate for each resource, a j’s (e.g., Vincent et al. 1996). Tradeoffs in a j’s produce differential consumption of the two resources. Differential feeding on the two resources, in turn, can allow the strength of intraspecific competition to exceed that of interspecific competition (thereby enabling stable coexistence). Therefore, in order to explore the effects of evolution on community structure, in the next section, we model the a j’s as a heritable phenotype/strategy. Importantly, differences in a j’s among consumers cause differences in minimal resource requirements. Thus, these differences in encounter rate drive selection for resource specialists or generalists, thereby providing a mechanism behind the evolutionary dynamics.
Evolutionary model
To study the evolution of consumer communities, we model an evolutionary game (e.g., Brown and Vincent 1987; Vincent and Brown 2005). The players in the game inherit their encounter rate strategies on resources 1 and 2. We assume that the ecological dynamics occur much quicker than the evolutionary dynamics. Therefore, a population using a particular mean strategy of resource encounter depletes resources to an equilibrium level. This separation of ecological and evolutionary time scales creates a consumer resource game, since the fitness and hence invasion success of any rare mutant strategy depends on equilibrial resource densities as determined by the strategies of others (Lawlor and Maynard Smith 1976). For example, a pure generalist strategy that invests in harvesting both resources equally may sufficiently deplete resources to prevent invasion by a specialist on either resource. However, in a community with only a specialist on resource 1, a specialist on resource 2 can likely invade, since resource 2 remains unexploited. Thus, a player’s fitness in this evolutionary game depends on the strategies of others, but indirectly, through leftover resources.
We model resource encounter rates as a heritable strategy (Fig. 1b). Furthermore, we assume that a (potentially nonlinear) tradeoff exists between encounter rates on resource 1 (a 1) and resource 2 (a 2). We designate v as the strategy/phenotype of a focal individual or rare mutant. The phenotypic tradeoff is defined by:
where the strategy variable v ranges between 0 and 1 as an arbitrary scaling. A consumer using strategy v = 0 specializes on resource 2 (i.e., a 2 = 1, a 1 = 0), while one with v = 1 specializes on resource 1 (i.e., a 1 = 1, a 2 = 0). A consumer using a strategy of v = (1/2)1/α is a perfect generalist, in the sense that this consumer has equal encounter rates on both resources. A single parameter α determines the shape of the phenotypic tradeoff (Fig. 1b). A convex tradeoff (α > 1) enables consumers to benefit from generalizing: given equal amounts of both resources, they can consume more total resources (R 1 and R 2) as a generalist. In contrast, with a concave tradeoff (α < 1), consumers suffer a penalty for generalizing: here, given equal amounts of both resources, a generalist will consume less than a specialist. When the tradeoff is linear (α = 1), generalists and specialists consume the same amount of resources, given equal amounts of both resources.
With the phenotypic tradeoff function (Eq. 4), we now define the G-function (Vincent and Brown 2005). “G-function” stands for “fitness generating function” and describes fitness of any phenotypic strategy for any ecological circumstance. Fitness is defined as per capita growth rate of the consumer from the ecological model (i.e., term in brackets in Eq. 1). The G-function is:
The model differentiates between the strategy of a focal individual/rare mutant (v) and the resident strategy (u). At such low density, the focal individual does not impact the resource environment. The resident population/s (N) impact resource levels differentially depending upon their current strategy/s (u). The resource levels set by the resident population/s, then, influence the fitness of any focal individual using strategy v. Thus, the consumer-resource game is played indirectly through resource levels. The strategies of current resident populations are modeled with the variable u, which is vector valued to include any number of residents (u = [u 1, u j, …u n]). Likewise, the population densities of the residents are modeled with the vector valued variable N = [N 1, N j, …N n ].
Recapitulating the ecological dynamics, given the resident populations (N) and strategies (u), we have the following system of equations:
This system (Eqs. 6–8) matches its purely ecological counterpart (Eqs. 1–3) but now includes the evolutionary variables. This system shows how resource density depends both on the population sizes (N) of extant resident consumers and their resource acquisition strategies (u).
We analyze the G-function model analytically and numerically to get a mechanistic understanding of selection and community assembly. Our analytical analysis of a G-function proceeds as follows (Table 2). First, we find an evolutionary equilibrium point. Evolutionary equilibrium points occur where the fitness gradient (∂G/∂v), with respect to the evolutionary variable v (evaluated at v = u), equals 0. After finding an evolutionary equilibrium point, we then evaluate its stability. Stability requires that the point is uninvadable (Maynard Smith 1976, 1982) and that the evolutionary dynamics converge to it (Eshel 1983; Nowak 1990). We use adaptive landscapes to demonstrate these stability properties. An adaptive landscape plots v versus G (v, R 1 *(u), R 2 *(u)) with a fixed u and the associated equilibrium resource densities (denoted by asterix). This relationship provides snapshots of selection pressures and can reveal whether or not a particular strategy is an evolutionarily stable strategy (ESS). A global ESS is a resident strategy, which is uninvadable by any alternative evolutionary strategies. It is represented by a global maximum on the adaptive landscape. Mathematically, these stability conditions come from second derivatives of the G-function. Thus, a concave-down adaptive landscape (∂2 G/∂v 2 < 0) indicates an ESS. However, the adaptive landscapes alone cannot reveal whether the evolutionary dynamics will converge on the equilibrium. Thus, we use the convergence stability concept to evaluate convergence to an evolutionary equilibrium point (Apaloo et al. 2009). We portray convergence stability using adaptive landscapes as well, demonstrating convergence when deviations from the current resident strategy (on either side in strategy space) cause the adaptive landscape to slope back toward the equilibrium point. Mathematically, ∂2 G/∂v∂u + ∂2 G/∂v 2 < 0 indicates that the equilibrium point in question is convergence stable (Table 2).
Results
We aim to determine the influence of resource relationships (Fig. 1a) and evolutionary tradeoff shape (Fig. 1b) on ecological communities in evolutionary time. In our incremental analysis, we first study eco-evolutionary dynamics of different nutritional interactions (substitutable, complementary, antagonistic) assuming a linear acquisition tradeoff (α = 1). Then, we focus on acquisition tradeoff shape (linear, convex, and concave) with nutritionally substitutable resources (β = 0, yielding linear ZNGIs). Finally, we combine nutritional interactions (nonlinear ZNGIs) with nonlinear acquisition tradeoff shapes simultaneously to characterize their interactive effects.
The effect of resource nutritional interactions (β) on evolutionary dynamics
By first assuming a linear acquisition tradeoff (α = 1), we focus on dynamics produced by different nutritional interactions (complementary, substitutable, and antagonistic, all driven by parameter β). As shown below, a single species could evolve to become a specialist on a single resource, or it could evolve to become a generalist that consumes both resources. A single species strategy can be evolutionarily stable or invadable (unstable). When a single species is not ESS, the ultimate ESS community is composed of two-specialist species.
Potential evolution of a perfect generalist
The evolution of a single species generally results in the evolution of a single generalist species (Fig. 2). However, if the nutritional interaction is antagonistic enough, a population evolves to a specialist species. The generic generalist strategy that evolves is the perfect generalist (u = 0.5). The perfect generalist consumes both resources with equal intensity (v = u = a 1 = a 2 = 0.5), and since we assume symmetrical supply, both resources have the same equilibrium abundances (R 1 * = R 2 *). The perfect generalist is an evolutionary equilibrium point independent of nutritional interaction (Appendix).

Evolution to a perfect generalist strategy (u = 0.5) is common among all nutritional interactions (with the exception of strongly antagonistic) given a linear tradeoff in resource encounter rates (α = 1). Left column (a, e, i): convergence stability with adaptive landscapes. The points show the location of resident strategies, which represent imbalanced generalists that are more specialized on resource 1 (u = 0.4, labeled with “1”) or on resource 2 (u = 0.6, labeled with “2”) than the perfect generalist (u = 0.5). In each case (increasing or decreasing the residents strategy), the perfect generalist has higher fitness and thus there is selection back toward the perfect generalist. Second column (b, f, j): Evolutionary dynamics: For each resource relationship, the consumer evolves to the perfect generalist from an imbalanced generalist resident more specialized on resource 1 or 2 (denoted by 1 and 2, respectively). Third column: ZNGIs of the perfect generalist and two rare mutant strategies following convergence (c, g, k): ZNGIs show whether or not a strategy more specialized on resource 1 or 2 (represented by dashed lines and labeled 1 and 2, respectively) can invade a perfect generalist (solid line). The dot shows the equilibrium level of resources set by the perfect generalist. c With a complementary nutritional interaction, specialists cannot invade. g With substitutable resources, specialists have the exact same resource requirement as the perfect generalist at the equilibrium point. And (k) with an antagonistic nutritional interaction, specialists can invade the perfect generalist strategy. Right column: adaptive landscapes of the perfect generalist following convergence (d, h, l): The location of the perfect generalist is shown by the point. These adaptive landscapes echo the results shown with the ZNGIs. Once the perfect generalists set the equilibrial resource levels, specialists now have lower, equal, or higher fitness than the perfect generalist for complementary (d), substitutable (h), and antagonistic resources (l), respectively. Parameters used: d = 1, S = 15, m = 0.05, α = 1, β = −0.5.0, and 2
For all nutritional interactions, except strongly antagonistic (defined below), the perfect generalist is convergence stable (left-most and middle-left columns, Fig. 2). The evolutionary dynamics converge to the perfect generalist because more specialized strategies leave more of one of the resources available at equilibrium. These left-overs create ecological opportunity for more generalized strategies. The resource imbalance created by an imperfect generalist resident species is large enough such that more generalized species have positive fitness and can invade and outcompete the current residents (adaptive landscapes in the left-most column, Fig. 2). This invasion and replacement process moves the population toward a more generalized strategy (evolutionary dynamics column, Fig. 2). Selection for a generalized species happens even when resources are moderately antagonistic (Fig. 2, bottom row), because the benefits of consuming more resources in total outweigh the antagonistic effects of consuming resources together.
However, depending on the type of nutritional interaction, the perfect generalist may or may not be evolutionarily stable. When the nutritional interaction is complementary (β > 0), the perfect generalist is ESS (Fig. 2d). In this case, the perfect generalist utilizes resources more efficiently than any alternative strategy, and thus, no mutant strategies can invade (as shown by the ZNGIs in Fig. 2c). If resources are nutritionally substitutable (β = 0), the perfect generalist is neutrally evolutionarily stable. The perfect generalist depletes resources to a level where all strategies have equal fitness of zero (i.e., flat landscape, Fig. 2h). Finally, if the nutritional interaction is antagonistic, the perfect generalist resides at an evolutionarily unstable fitness minimum on the adaptive landscape (i.e., the landscape is concave up, ∂2 G/∂v 2 > 0; Fig. 2l). Any alternative rare mutant strategy has higher fitness (Fig. 2k, l). This instability happens because shortsighted gains in fitness via natural selection move the evolutionary dynamics to the perfect generalist (shown in Fig. 2j). But, as the strategy moves closer to the perfect generalist, specialist fitness becomes increasingly high relative to the generalist (as seen by the ZNGIs in Fig. 2k). The specialist’s fitness increases relative to the generalists because the specialists pay no fitness cost for resource antagonism.
Each of these cases (Fig. 2) predicts convergence stability of the perfect generalist. However, as resource relationships become increasingly antagonistic (β ≪ 0), the perfect generalist equilibrium changes to locally convergence stable (“moderately antagonistic”; Fig. 3a) and then not convergence stable (“strongly antagonistic”; Fig. 3b). As resources become increasingly antagonistic, the cost of resource antagonism eventually outweighs the benefit of consuming more total resources for generalist strategies relative to more specialized strategies. This difference creates selection to specialize. Mathematically, lowering β below 0 results in two further evolutionary bifurcation points. We define weakly antagonistic as values of β between 1/S − b/m and 0 (bottom row of Fig. 2). In this region of the parameter space, the perfect generalist remains as the only evolutionary equilibrium point, and it is convergence stable. However, as the nutritional interaction becomes moderately antagonistic (−b/m < β < 1/S − b/m), the model produces three interior evolutionary equilibrium points (Fig. 3a). Two additional flanking equilibrium points arise on each side of the perfect generalist. These equilibria correspond to more specialized “imbalanced generalists.” While the perfect generalist remains convergence stable, the flanking equilibria are unstable. Starting from a strategy more specialized than either of the imperfect generalists, the dynamics converge to the nearest specialist, not the pure generalist (Fig. 3a), because the specialist gains nothing by generalizing. On the other hand, a strategy that is already more generalized than either imperfect generalist can increase fitness by further generalizing. Finally, when resources become strongly antagonistic (β < −b/m), the flanking interior equilibrium points disappear, and the perfect generalist equilibrium becomes convergence unstable (Fig. 3b). Here, no generalized strategy can gain advantage over the two specialists because it is never advantageous to consume such antagonistic resources together.

Evolutionary convergence stability with moderately (−b/m < β < 1/S − b/m) and strongly (β < −b/m) antagonistic resource nutritional interactions. The value of the fitness gradient (∂G/∂v) determines whether there is selection for a more specialized or generalized strategy. A positive or negative fitness gradient to the left of the perfect generalist (u = v = 0.5) selects for a generalist and a specialist, respectively. This relationship is reversed for strategies to the right of the perfect generalist. The points show the location of interior equilibrium points. Filled points are convergence stable, and open points are convergence unstable (see Table 2). a With moderately antagonistic resources, there are three equilibrium points. The perfect generalist is convergence stable, flanked by two convergence unstable “imperfect generalist” equilibrium points. The specialists at the boundaries of the phenotype space (u = v = 0 and u = v = 1) are also convergence stable. Starting with any strategy bounded by the specialist and one of the outer interior equilibrium points produces selection toward the specialist (i.e., arrows point toward specialist). Otherwise, a strategy that starts more interior, between the perfect generalist and the imbalanced generalist equilibrium points, produces selection toward the perfect generalist (i.e., arrows point toward perfect generalist). b With a strongly antagonistic nutritional interaction, there is a single, unstable, convergence unstable equilibrium point at the perfect generalist strategy. Populations with strategies that are more specialized on a particular resource are under selection to become more specialized on that resource (i.e., the arrows point away from the perfect generalist). Thus, the two-specialist strategies are convergence stable. Parameters used: (A) β = −1.98, (B) β = −2
In any of the antagonistic resource scenarios, the evolutionary outcome is an evolutionarily unstable equilibrium. Selection can lead to a single specialist strategy, which is invadable by the other specialist. Alternatively, selection can lead to the perfect generalist, which resides at an adaptive minimum. In the following section, we address the evolutionary dynamics continuing from an unstable equilibrium under antagonistic resources.
Evolution of two-specialist species consuming antagonistic resources
With an antagonistic nutritional interaction (β < 0), an evolutionarily stable community composed of two-specialist species becomes possible. The evolutionary stable community is a coalition of strategies that repels invasion by any other strategies—even by a generalized strategy. However, there are two different routes by which the two-specialist ESS can be reached, depending on the strength of resource nutritional antagonism (Fig. 4).

Two different routes to a two species specialist ESS when the resource nutritional interaction is antagonistic (β < 0). a Speciation route: If the nutritional interaction is weakly antagonistic (1/S − b/m < β < 0), then selection can converge on the perfect generalist (u = 0.5). Speciation can also occur with a moderately antagonistic nutritional interaction (−b/m < β < 1/S − b/m), if the initial resident strategy is close to the perfect generalist. The perfect generalist resides at an adaptive minimum, which can lead to speciation. b Invasion route: When the nutritional interaction is strongly antagonistic (β < −b/m), there can be selection for a resource 2 specialist (u = 0), which then leaves an open niche for the resource 1 specialist (u = 1). However, a trough on the adaptive landscape (i.e., G < 0) separates the two specialists. Therefore, the resource 1 specialist needs to invade the community—in other words, one specialist cannot speciate into the other specialist. The invasion process can also start with selection for a resource 2 specialist followed by invasion of a resource 1 specialist. Community diversification by the invasion mechanism also occurs with a moderately antagonistic nutritional interaction (−b/m < β < 1/S − b/m) if the initial resident strategy is relatively close to either specialist. c. ESS community: Via either route, the ultimate outcome of selection is an ESS community of two-specialist species. Here, we illustrate the moderate antagonism case. Parameters used: d = 1, S = 15, m = 0.05, α = 1, β = −1.98
Speciation route
For a weakly antagonistic nutritional interaction, the perfect generalist is convergence stable, but resides at an adaptive minimum (e.g., Figs. 2l and 4a). At an adaptive minimum, a population experiences divergent selection pressure, which can result in adaptive speciation (Fig. 4a). Speciation from a generalist strategy then results in two evolutionarily stable specialists (Fig. 4c).
Invasion route
For a strongly antagonistic nutritional interaction (β < −b/m), a single specialist species is a local ESS but never a global ESS. In this situation, a niche is left open for a competitor that is more specialized on the alternative resource. However, because there is a fitness trough separating the specialists (i.e., a range of strategy v for which G < 0; Fig. 4b), the other competitor either needs a large mutational jump or needs to have evolved in another location and subsequently invade the system. We refer to this as the invasion route. Following invasion, subsequent evolution drives the community to an ESS of two-specialist species (Fig. 4c). Finally, when the nutritional interaction is moderately antagonistic (−b/m < β < 1/S − b/m), evolution to the ESS community can proceed by either mechanism, depending upon initial phenotypic conditions. This behavior mirrors the stability results (Fig. 3 and it is the example shown in Fig. 4). Phenotypes closer to the perfect generalist proceed by the speciation mechanism, and phenotypes closer to either specialist proceed by the invasion mechanism.
The effect of resource acquisition tradeoff shapes (α) on evolutionary dynamics
Change in acquisition tradeoff shape (α) has similar effects as nutritional interactions do on the evolutionary dynamics, albeit by a very different mechanism. In our previous investigation, nutritional interaction curved the ZNGI toward or away from the origin, making generalist reproduction more or less efficient, respectively. Now, we consider only linear ZNGIs of substitutable nutrition (β = 0) under different acquisition tradeoff shapes. In the current case, resource use efficiency changes via the acquisition tradeoff shape. Graphically, a convex tradeoff (α > 1) pushes the ZNGI in toward the origin, and a concave tradeoff (α < 1) pushes the ZNGI out away from the origin (Fig. 5). The change in position of the ZNGI means that as consumers generalize, their overall resource use efficiency changes depending upon tradeoff shape.

Evolutionary effects of resource acquisition tradeoff shape (α). Note that the location of the perfect generalist ((1/2)^(1/α)) depends upon the value of α. Left column: convergence stability with adaptive landscapes (a, e): The lines show adaptive landscapes for imbalanced generalist resident strategies more specialized on resource 1 or resource 2 (labeled with 1 and 2, respectively), and the dots show the location of the residents. Starting from either initial resident strategy produces selection toward a more generalized strategy, as the perfect generalist has higher fitness. Second column: Evolutionary dynamics (b, f): These plots show the evolutionary trajectory of the resident strategies depicted in the last set of figures through time. For both tradeoff shapes and initial conditions, the perfect generalist is selected for. Third column: ZNGIs of the perfect generalist and two rare mutant strategies subsequent to convergence (c, g): ZNGIs show whether or not a strategy more specialized on resource 1 or 2 (represented by dashed lines and labeled 1 and 2, respectively) can invade a perfect generalist (solid line). The dot shows the equilibrium level of resources set by the perfect generalist. For a convex tradeoff, the perfect generalist cannot be invaded by a more specialized strategy, because resource levels are too low (c). However, with concave tradeoff, the perfect generalist can be invaded by more specialized strategies, because the perfect generalist leaves behind enough resources (g). Right column: adaptive landscapes of the perfect generalist subsequent to convergence (d, h): The dot marks the location of the perfect generalist strategy along the phenotype axis. These adaptive landscapes echo the results shown with the ZNGIs. Specialists have lower or higher fitness compared to the perfect generalist for convex (d) and concave (h) tradeoffs, respectively. Parameters used: d = 1, S = 15, m = 0.05, β = 0, and α = 0.5, 2
Potential evolution of a perfect generalist
In general, different acquisition tradeoff shapes result in the evolution of a perfect generalist (Fig. 5). However, if the acquisition tradeoff is strongly concave, then a single specialist is selected for. As we saw with nutritional interactions (varying β), the perfect generalist is an equilibrium point independent of tradeoff shape (Appendix). Furthermore, it is convergence stable (Fig. 5a, b, e, f) provided that the tradeoff shape is not strongly concave. Selection for the perfect generalist happens despite that, as the consumer population generalizes, the tradeoff reduces a consumers’ ability to encounter the more exploited resource. The real benefit to generalizing is that consumer’s combined harvest rate of both resources increases. Thus, the consumer should sacrifice its encounter rate on the more exploited resource (lower abundance) in order to increase foraging on the more abundant and less exploited resource.
While usually convergent stable, the perfect generalist is not always ESS. The ability of a rare mutant strategy to successfully invade depends upon acquisition tradeoff shape. A convex (α > 1) tradeoff results in an ESS (Fig. 5d) because the perfect generalist has the highest overall resource encounter rate relative to any other strategy. Therefore, it leaves behind the lowest resource amounts (i.e., its ZNGI falls below that of more imperfect generalists; Fig. 5c, d), effectively reducing success of invaders with other strategies. On the other hand, a concave tradeoff (α < 1) results in an evolutionarily unstable adaptive minimum (Fig. 5h). Here, the perfect generalist has the lowest overall resource encounter rate relative to any other strategy and thus leaves behind enough resources such that any other strategy can invade (Fig. 5g, h).
Interestingly, with any concave tradeoff, the perfect generalist is never globally convergence stable. In fact, it is only locally convergence stable when the tradeoff is weak. With tradeoff concavity, selection always holds the specialists in place because tradeoff concavity produces additional unstable interior equilibrium points (mirroring results with antagonistic resources [β < 0] seen in Fig. 3). Numerical study shows that, with a linear tradeoff (α = 1), the additional interior equilibrium points coincide with the specialists. As the tradeoff becomes more strongly concave (α > 1 increasing), these equilibrium points move into the interior. With two unstable equilibria, the behavior mirrors that seen for the moderately antagonistic resource (Fig. 3a). Finally, as the tradeoff becomes even more concave (α ≤ 0.254, given the parameters used), the imbalanced generalist equilibrium points coincide with the perfect generalist. Now, the perfect generalist becomes convergence unstable. Thus, starting from any phenotype, selection favors specialization because the ecological benefit of generalizing (use of untapped but antagonistic resources) is offset by the evolutionary cost (reduced acquisition of those resources). However, the specialized species then becomes vulnerable to invasion (as with an antagonistic nutritional interaction [β < 0]; Fig. 3).
Evolution of two-specialist species
A community of two-specialist species is ESS only with concave acquisition tradeoffs. As shown for an antagonistic nutritional interaction, there are two different routes to this two-species ESS (depicted in Fig. 4). If the tradeoff shape is weakly concave, the ESS can be reached by adaptive speciation (initial phenotype closer to perfect generalist) or invasion (initial phenotype closer to one of the specialists). Otherwise, if the tradeoff is strongly concave, the ESS can only be reached by the invasion mechanism. These results closely mirror those seen for nutritional interactions (Fig. 4). In fact, the main evolutionary difference between the effects of resource relationships and evolutionary tradeoff shape involves the bifurcation sequence. With nutritional interactions (involving β), there are three evolutionary bifurcation points: as the nutritional interaction changes from complementary (β > 0) to antagonistic (β < 0), the landscape changes from a minimum to a maximum at a single equilibrium point. Then, as nutritional interaction become moderately antagonistic, two more interior equilibrium points emerge (pitchfork bifurcation). Finally, when the two flanking interior equilibrium points reach the phenotypic boundaries, the perfect generalist equilibrium point becomes unstable. With the resource acquisition tradeoff (involving α), the first two steps in the sequence are not separate bifurcation points but rather co-occur in a single bifurcation point, where the tradeoff transitions from convex to concave (α = 1). Besides this relatively minor detail, nutritional interaction and tradeoff shape independently have almost identical effects on communities in evolutionary time.
Joint influence of nutritional interactions (β) and acquisition tradeoff shapes (α) on evolutionary dynamics
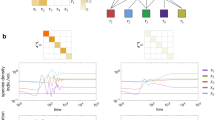
Once we allow both nutritional interactions (β) and acquisition tradeoffs (α) to vary, interactions between them can potentially arise. Both factors have similar effects on the evolutionary dynamics; together, they could either reinforce or counteract one another. For example, an antagonistic nutritional interaction combined with a convex acquisition tradeoff could trigger evolution of a generalist at an evolutionary minimum or maximum depending on their relative strengths. Indeed, the combination of both factors can create more complex terrain on the adaptive landscapes. When one of the effects produces convergent selection on the generalist and the other produces divergent selection, landscapes can have two peaks or two troughs (Fig. 6). A convex tradeoff (α > 1) combined with an antagonistic nutritional interaction (β < 0) can produce landscapes which have two peaks and result in evolution to a minimum (Fig. 6a), followed by speciation to two imperfect generalists (Fig. 6b). On the other hand, a concave tradeoff (α < 1) combined with nutritional complementarity (β > 0) produces landscapes with two troughs, where a generalist species gets “stranded” at a local maximum (Fig. 6c). The resulting landscape is then invadable by more specialized species, ultimately resulting in a community of two specialists (Fig. 6d).

The combination of resource nutritional interaction (β) and resource acquisition tradeoff shape (α) produces specific patterns of complex terrain on adaptive landscapes. The landscapes depict the fitness of rare mutant strategies with resident strategies depicted by dots. a Given a convex acquisition tradeoff and nutritional antagonism (α = 1.2, and β = −0.75), the perfect generalist resides at a local adaptive minima. The unstable evolutionary minimum can result in speciation. b Following speciation and subsequent evolution, the ESS community is composed of two imperfect generalist species. c Given a concave acquisition tradeoff and nutritional complementarity (α = 0.8, β = 1.5), the perfect generalist resides at a local maximum. The perfect generalist landscape is invadable by more specialized strategies. d Invasion followed by subsequent evolution results in an ESS community of two-specialist species
In both instances, the complex fitness landscapes arise because the magnitude of the effect of the resource interaction strongly depends upon resource abundances. The effect of resource interaction on fecundity is geometric or multiplicative (Eq. 5). Thus, as a population moves toward a generalist strategy and resource abundances become similar, the interaction between resources becomes stronger. Essentially, near the perfect generalist, the effect of the resource relationship outweighs the effects of increased or decreased overall foraging rate from the acquisition tradeoff shape. Consider an antagonistic nutritional interaction combined with a convex acquisition tradeoff. Here, the perfect generalist suffers a larger fitness penalty than surrounding strategies due to the geometric effects of resource nutritional interaction. This fitness penalty creates a local minimum in the center of the adaptive landscape (Fig. 6a, b). Furthermore, imperfect generalists have imbalanced resource intake rates. As this imbalance increases, the negative effect of nutritional antagonism becomes overwhelmed by the positive effect of a convex acquisition tradeoff. This push and pull between nutritional interactions and acquisition tradeoff effects creates the two peaks on the adaptive landscapes—and explains why speciation produces two imperfect generalists (Fig. 6a, b). In the same vein of reasoning, when the acquisition tradeoff is concave combined with resource nutritional complementarity, the fitness of strategies near the perfect generalist is more strongly influenced by resource nutritional interaction and the fitness of more imbalanced generalists is more strongly influenced by acquisition tradeoff. The perfect generalist is convergence stable, but because of the push and pull between resource nutritional interaction and acquisition tradeoff shape, the perfect generalist becomes “stranded” at a local peak on the adaptive landscape (Fig. 6c). From here, more specialized strategies can invade the community, which ultimately results in an ESS community of two specialists (Fig. 6d).
For any given parameter combination, ESS communities can be composed of a single generalist, two imperfect generalists, or two specialists (Fig. 7). Variation in nutritional interaction or acquisition tradeoffs alone results in communities of either two specialists or a single generalist. However, a community with two coexisting generalists is only evolutionarily stable with an interaction between nutritional interaction and acquisition tradeoff shape (Fig. 6b). Specifically, this requires nutritional antagonism and a convex acquisition tradeoff. The opposite scenario of a concave acquisition tradeoff and a nutritional complementarity results in the coexistence of two specialists, as dictated by the shapes of the adaptive landscapes (Fig. 6d).

Evolutionarily stable communities as a function of resource nutritional interaction (β) and acquisition tradeoff shape (α) under high (a) and low (b) resource equilibrium values. Resource equilibria arise via different per capita mortality rates of consumers (m). The dashed black lines divide the parameter space into the four possible combinations of nutritional interaction (β) and acquisition tradeoff shape (α). Communities are composed of two specialists (solid white area), two imperfect generalists (solid black area), or a single perfect generalist (solid gray area). Evolutionarily stable communities of two generalists only occur in regions where the resource nutritional interaction is antagonistic (β < 0), and the acquisition tradeoff is convex (α > 0). a High resource density (at equilibrium) increases the strength of nutritional interaction relative to acquisition tradeoff shape. In this case, nutritional interaction mainly determines the transition from specialist to generalist communities. b Low resource density reduces the strength of the nutritional interaction relative to acquisition tradeoff shape. Therefore, the specialist versus generalist transition is mainly controlled by acquisition tradeoff shape
Resource equilibrium values dictate how the push and pull between resource nutritional interaction and acquisition tradeoff determines the ESS community (Fig. 7). Equilibrial values of resources become high when, for instance, mortality rate of consumers (m) increases. In this circumstance, the geometric effect of resource interaction on consumer fecundity becomes stronger relative to the effect of acquisition tradeoff shape. Thus, convergent selection pressure from a complementary nutritional interaction (β > 0) more effectively negates divergent selection pressure from a concave evolutionary tradeoff (α < 0). Likewise, divergent selection pressure from an antagonistic nutritional interaction (β < 0) more effectively negates the divergent selection pressure of a convex acquisition tradeoff (α > 1). Hence, with a high-resource equilibrium, nutritional antagonism produces communities of two specialists unless the acquisition tradeoff is strongly convex (Fig. 7a). On the other hand, when resource equilibrium is low (low mortality, m), the resource interaction effect is reduced relative to the effect of evolutionary tradeoff shape (Fig. 7b). Hence, a quite antagonistic nutritional interaction can support two generalists or a single generalist given some acquisition tradeoff convexity (Fig. 7b).
Discussion
How can so many generalist consumers coexist in various ecosystems (Beaver 1979; Freeland 1991; Polis 1991; Reagan and Wade 1996; Novotny and Basset 2005)? Ecological theory offers an explanation for their coexistence (Tilman 1982; Grover 1997; Chesson 2000). For example, when two consumers compete for two resources, coexistence can arise through tradeoffs in resource encounter rates between species (e.g., Vincent et al. 1996). This tradeoff ensures that each consumer becomes most limited by a different resource but also consumes more of the resource that most limits its growth (guaranteeing that intraspecific competition exceeds interspecific competition). However, in an evolutionary context, such ecological mechanisms become evolutionarily unstable (e.g., Egas et al. 2004). More specifically, due to eco-evolutionary feedback, natural selection prevents coexistence of competing generalists (Abrams 2006). Therefore, evolution creates a disconnect between eco-evolutionary theory (predicting coexistence of specialists) and observations of nature (where generalists abound). We illustrate this problem using evolutionary game theory and then present a solution to it.
Two factors vital to organismal fitness—nutritional interaction between resources and the shape of the tradeoff governing resource acquisition—influence evolutionary stability in similar ways. We considered each of these factors in “isolation” by assuming that the alternate factor was linear (i.e., substitutable resources or linear acquisition tradeoff). Under these circumstances, natural selection produces convergent forces that destroy diversity or divergent forces that enhance coexistence of specialists but not generalists. Specifically, complementary nutritional interactions or a convex acquisition tradeoff causes consumers to converge to a single generalist species. This convergence destroys ecologically mediated coexistence of generalists. Conversely, antagonistic nutritional interactions or a concave acquisition tradeoff cause consumers to diverge. This process promotes coexistence of two non-interacting, specialist species. In both instances, natural selection prevents coexistence of generalists (Abrams 2006).
Here, we present a mechanism that enables coexistence of competing generalists. This mechanism connects nonlinearities in nutritional interaction of resources and acquisition tradeoffs. Nutritional interactions and acquisition tradeoffs can push and pull against one another, creating more complex selection pressures. Ultimately, this push-pull dynamic can stabilize the coexistence of two generalist species in evolutionary time. For example, an antagonistic tradeoff creates divergence, but a convex acquisition tradeoff enables convergence. The push-pull combination of these forces creates stabilizing selection on two imperfect generalist species. In this scenario, evolution does not produce a single perfect generalist due to a fitness penalty for eating both antagonistic resources equally. However, evolution does not result in two coexisting specialists either, because the convex acquisition tradeoff means that specialists eat less than generalists. The eco-evolutionary outcome, then, is that two imperfect generalist species (one consumer eats a bit more of one resource, the other consumer eats a bit more of the other resource) reduce resources to a level that prevents successful invasion by other resource consumption strategies. Interestingly, with the other push-pull combination (complementary nutrition but a concave tradeoff), the two imperfect generalists become the worst possible strategies (i.e., any alternative strategy can invade). In this combination, complementary resources favor the perfect generalist. However, the concave acquisition tradeoff renders this strategy vulnerable to invasion by two perfect specialists because the concave tradeoff penalizes generalist strategies. The result in this scenario is that two-specialist species coexist and reduce resources to a level that exclude perfect generalists and all other strategies.
Antagonistic nutritional interactions and convex acquisition tradeoffs are key to the maintenance of coexisting generalists, but just how common are these features in nature? Antagonistic resources have received surprisingly little attention. In principle, interactions between plant toxins could generate resource antagonism. By analogy, antagonisms frequently arise in certain drug–drug (Rodrigues 2013), drug–nutrient (Hathcock 1985; Thomas 1995), and micronutrient–micronutrient (Couzy et al. 1992; Sandström 2001) combinations in medical research. One might imagine similar rules might apply for herbivores. However, we cannot pinpoint specific empirical studies that demonstrate it. Similarly, little evidence supports convexity of resource acquisition tradeoffs. We know of no empirical studies that demonstrate a convex (or any other shape) tradeoff in resource acquisition traits. Tradeoff shape is a critical feature included in many evolutionary models (e.g. Stearns 1992, Roff 2002; Kisdi 2006). However, it is rarely measured empirically (Roff and Fairbairn 2007). Scant empirical evidence for either of these mechanisms may simply reflect a lack of research on these important topics that lie at the heart of species coexistence and maintenance of diversity.
Our results provide a different take on a complementary solution to this generalist-coexistence problem. In our model, trait differences between consumers arise only as a product of natural selection. In contrast, two generalists feeding on complementary resource can stably coexist over evolutionary time if they maintain some non-evolving differences (Vasseur and Fox 2011). In the Vasseur and Fox model, consumers have fixed, and different optimal stoichiometric ratios drive differences in optimal uptake of the two resources but are allowed to evolve their uptake rates on two resources containing different elemental ratios. These differences in optimal stoichiometric ratios maintain the coexistence of two generalists. The fixed-difference assumption has a couple of interpretations. In one interpretation, competing consumers are evolutionarily distantly related. Such distant relatives use fundamentally different relationships between acquisition and use of resources, growth, and fitness. Alternatively, competing species simply lack genetic diversity in certain traits but not others. This latter assumption might approximate evolution of behavioral traits (such as diet selection), which can evolve much more rapidly than structural characters (such as teeth) involved in resource acquisition (e.g., Rueffler et al. 2007). Regardless, removal of this fixed-difference assumption produces the community composition patterns described above: convergent selection causes two generalists to collapse to a single generalist or divergent selection causes two generalists to diversify into two specialists that no longer compete.
These two suites of assumptions—developed here and elsewhere (Zu and Wang 2013; Fox and Vasseur 2008; Vasseur and Fox 2011)—pose two different solutions to what otherwise seems like a vexing problem in evolutionary ecology. How can we delineate between them? Clearly, two types of data are needed: data on resource-oriented traits that influence fitness and data from experimental evolution studies. More specifically, we need data on heritable phenotypic variation in central consumption parameters such as encounter rates, conversion efficiencies, and handling times. Second, evolution experiments could connect empirically determined acquisition tradeoff shapes and resource nutritional interactions to real evolutionary outcomes. The challenge here involves pinpointing a system that can test these hypotheses. However, recent empirical work has moved in this direction. Notably, Escherichia coli can adaptively speciate via tradeoffs in resource use but by few mutations with large effect rather than many mutations with small effect (Friesen et al. 2004). The present theory requires quantitative traits. Given a system with quantitative traits, a more tailored model could more realistically represent the physiology and ecology of the model system.
In the meantime, we could enhance the present model. First, the model could incorporate other components of the consumer’s niche. For example, anti-predator adaptations may overshadow or interact with resource-based adaptations to shape the ESS community (e.g., Bernays and Graham 1988; Fussmann et al. 2007). Secondly, the nutritional benefits and toxic costs of resources may often interact in complex ways. For example, herbivores require a mix of foods to efficiently detoxify toxic biochemical (Provenza et al. 2003). They thus diversify their diets in order to avoid excess consumption of any single toxin (Feng et al. 2009). These scenarios present a more complicated nutritional landscape than we have considered here. Third, more complicated acquisition tradeoff shapes—if warranted biologically—could support coexistence of generalists without the need for a tug of war between acquisition tradeoffs and nutritional interactions (Zu and Wang 2013). Finally, gaps in the phenotype space could enable coexistence of generalists. In some circumstances, the breadth of phenotypic diversity modeled here may not fully exist. For example, pure specialist strategies may not be evolutionarily attainable. Hence, divergent selection could promote coexistence of imperfect generalists sitting at phenotypic boundaries.
Nonetheless, the model here provides new insight into a theory-observation dilemma. Generalist consumers abound in nature. However, eco-evolutionary theory struggles to predict their coexistence. This discrepancy means that the models lack some fundamental biology or assumption. Here, we have provided another theoretical solution to this problem. Specifically, an interaction between resource nutritional interactions and resource acquisition tradeoffs provides a mechanism that stabilizes the coexistence of generalists in an evolutionary context. However, in our model, this only occurs with an antagonistic nutritional interaction and a convex acquisition tradeoff. How often does this combination arise in nature? Is this a broad explanation? The answers to these questions await more empirical focus on nutritional interactions and tradeoff shapes.
References
Abrams PA (1987) Alternative models of character displacement and niche shift. I. Adaptive shifts in resource use when there is competition for nutritionally nonsubstitutable resources. Evolution 41:651–661
Abrams PA (2006) Adaptive change in the resource-exploitation traits of a generalist consumer: the coevolution and coexistence of generalists and specialists. Evolution 60:427–439
Apaloo J, Brown JS, Vincent TL (2009) Evolutionary game theory: ESS, convergence stability, and NIS. Evol Ecol Res 11:489–515
Beaver RA (1979) Host specificity of temperate and tropical animals. Nature 281:139–141
Bernays E, Graham M (1988) On the evolution of host specificity in phytophagous arthropods. Ecology 69:886–892
Brown JS, Vincent TL (1987) A theory for the evolutionary game. Theor Popul Biol 31:140–166
Brown WL, Wilson EO (1956) Character displacement. Syst Zool 5:49–64
Chesson P (2000) Mechanisms of maintenance of species diversity. Annu Rev Ecol Syst 31:343–366
Couzy F, Keen C, Gershwin ME, Mareschi JP (1992) Nutritional implications of the interactions between minerals. Prog Food Nutr Sci 17:65–87
de Mazancourt C, Dieckmann U (2004) Trade‐off geometries and frequency‐dependent selection. Am Nat 164:765–778
Egas M, Dieckmann U, Sabelis MW (2004) Evolution restricts the coexistence of specialists and generalists: the role of trade‐off structure. Am Nat 163:518–531
Eshel I (1983) Evolutionary and continuous stability. J Theor Biol 103:99–111
Feng Z, Liu R, DeAngelis DL, Bryant JP, Kieland K, Chapin FS, Swihart RK (2009) Plant toxicity, adaptive herbivory, and plant community dynamics. Ecosystems 12:534–547
Fox JW, Vasseur DA (2008) Character convergence under competition for nutritionally essential resources. Am Nat 172:667–680
Freeland WJ (1991) Plant secondary metabolites: biochemical evolution with herbivores. In: Palo R, Robbins CT (eds) Plant defenses against mammalian herbivory. CRC, Boca Raton, pp 61–82
Friesen ML, Saxer G, Travisano M, Doebel M (2004) Experimental evidence for sympatric ecological diversification due to frequency‐dependent competition in Escherichia coli. Evolution 58:245–260
Fussmann GF, Loreau M, Abrams PA (2007) Eco‐evolutionary dynamics of communities and ecosystems. Funct Ecol 21:465–477
Grover J (1997) Resource competition. Springer, New York
Hathcock JN (1985) Metabolic mechanisms of drug-nutrient interactions. Fed Proc 44:124–199
Huston MA (1994) Biological diversity: the coexistence of species. Cambridge University Press, Cambridge
Kisdi É (2006) Trade-off geometries and the adaptive dynamics of two co-evolving species. Evol Ecol Res 8:959–973
Lawlor LR, Maynard Smith J (1976) The coevolution and stability of competing species. Am Nat 110:79–99
Levins R (1968) Evolution in changing environments. Princeton University Press, Princeton
MacArthur RH (1970) Species packing and competitive equilibrium for many species. Theor Popul Biol 1:1–11
MacArthur RH (1972) Geographical ecology: patterns in the distribution of species. Princeton University Press, Princeton
Maynard Smith J (1976) Evolution and the theory of games: in situations characterized by conflict of interest, the best strategy to adopt depends on what others are doing. Am Sci 64:41–45
Maynard Smith J (1982) Evolution and the theory of games. Cambridge University Press, Cambridge
Novotny V, Basset Y (2005) Host specificity of insect herbivores in tropical forests. Proc R Soc B 272:1083–1090
Nowak M (1990) An evolutionarily stable strategy may be inaccessible. J Theor Biol 142:237–241
Polis GA (1991) Complex trophic interactions in deserts: an empirical critique of food-web theory. Am Nat 138:123–155
Provenza FD, Villalba JJ, Dziba LE, Atwood SB, Banner RE (2003) Linking herbivore experience, varied diets, and plant biochemical diversity. Small Rumin Res 49:257–274
Reagan DP, Waide RB (eds) (1996) The food web of a tropical rain forest. University of Chicago Press, Chicago
Rodrigues AD (ed) (2013) Drug-drug interactions. CRC Press, Boca Raton
Roff DA (2002) Life history evolution. Sinauer Associates, Sunderland
Roff DA, Fairbairn DJ (2007) The evolution of trade‐offs: where are we? J Evol Biol 20:433–447
Rueffler C, Van Dooren TJM, Metz JAJ (2004) Adaptive walks on changing landscapes: Levins’ approach extended. Theor Popul Biol 65:165–178
Rueffler C, Van Dooren TJM, Metz JAJ (2006) The evolution of resource specialization through frequency‐dependent and frequency‐independent mechanisms. Am Nat 167:81–93
Rueffler C, Van Dooren TJM, Metz JAJ (2007) The interplay between behavior and morphology in the evolutionary dynamics of resource specialization. Am Nat 169:E34–E52
Sandström B (2001) Micronutrient interactions: effects on absorption and bioavailability. Br J Nutr 85:S181–S185
Stearns SC (1992) The evolution of life histories. Oxford University Press, New York
Thomas JA (1995) Drug–nutrient interactions. Nutr Rev 53:271–282
Tilman D (1980) Resources: a graphical-mechanistic approach to competition and predation. Am Nat 116:362–393
Tilman D (1982) Resource competition and community structure. Princeton University Press, Princeton
Vasseur DA, Fox JW (2011) Adaptive dynamics of competition for nutritionally complementary resources: character convergence, displacement, and parallelism. Am Nat 178:501–514
Vincent TL, Brown JS (2005) Evolutionary game theory, natural selection, and darwinian dynamics. Cambridge University Press, Cambridge
Vincent TLS, Scheel D, Brown JS, Vincent TL (1996) Trade-offs and coexistence in consumer-resource models: it all depends on what and where you eat. Am Nat 148:1038–1058
Zu J, Wang JL (2013) Adaptive evolution of attack ability promotes the evolutionary branching of predator species. Theor Popul Biol 89:12–23
Acknowledgments
We thank the Hall lab staff—Marta Shocket, Alex Strauss, and Jessica Hite—for helpful suggestions on the manuscript. This work was supported by a National Science Foundation grant (0949547).
Author information
Authors and Affiliations
Corresponding author
Appendix: Evolutionary stability under different resource nutritional interactions and different resource acquisition tradeoffs
Appendix: Evolutionary stability under different resource nutritional interactions and different resource acquisition tradeoffs
Different resource nutritional interactions
Mathematically, evolutionary equilibrium points occur where the derivative of the fitness function with respect to v, evaluated at v = u, is zero. The derivative of the fitness function is given by:
One can see that the perfect generalist (v = u = 0.5) evaluates to zero and thus is an equilibrium point. Note that the perfect generalist will reduce both resources to the same equilibrium level (assuming resource supply rates are equal).
To evaluate specialist boundaries as equilibrium points, the fitness gradient needs not be 0. Instead, selection can keep a specialist stable if the landscape slopes up toward the specialist. That is, if the landscape has a positive or negative slope when evaluated at u = 1 (resource 1 specialist) or u = 0 (resource 2 specialist), respectively. We find that a specialist strategy is only selected for when resources are strongly antagonistic. When a single species is a specialist, the R * of the resource they specialize on will be m/b (remembering that resource encounter rate is 1 for a specialist). The other resource will be at its supply point (S), since it is not consumed. Plugging in the resource equilibrium values and the value of the evolutionary strategy, and simplifying, shows that a specialist becomes an evolutionary equilibrium point whenever β < 1/S − b/m. Numerical simulations show that this is the same condition for the existence of the two additional interior equilibrium points. Thus, β = 1/S − b/m is a bifurcation point where the stability properties of the model change from a single equilibrium point to three interior equilibrium points.
The curvature of the landscape at an equilibrium point allows us to determine whether the point is invadable or not (ESS). It is evaluated using the second derivative of the G-function with respect to the evolutionary variable v. This is given by
Since R *s are always positive, the landscape is concave down (evolutionary maximum) when β > 0 (complementary resources), concave up (evolutionary minimum) when β < 0 (antagonistic resources), and has no curvature (evolutionary neutrality) when β = 0 (substitutable resources).
Whenever β < 0, two specialists are always evolutionarily stable. Substituting R 1 * = R 2 * = m/b and evaluating the derivative of the fitness function gives a negative value (b β (m/b)2) at u = 0 and a positive value (−b β (m/b)2) at u = 1. Recall that β is negative when resources are antagonistic.
Different resource acquisition tradeoffs
In this scenario, the fitness gradient is given by:
The perfect generalist is located at u = (1/2)1/α. At this point, the fitness gradient evaluates to 0, demonstrating that the perfect generalist is an evolutionary equilibrium.
To evaluate the stability of the specialist strategies, we can calculate the derivate at the boundary values (u = v = 0 and u = v = 1). However, since this expression is undefined at these points, we take the limit of this derivative as these values are approached. Evaluating the limit as v = u approaches 1, and the associated R 1 * = m/b and R 2* = S, gives m for α < 1 (selection for specialist), m − bS for α = 1 (selection depends on which resource is more abundant), and –∞ for α > 1 (selection for generalist). Likewise, evaluating the limit of the derivative as u = v approaches 0, and the associated R 1 * = S and R 2 * = m/b, gives –∞ for α < 1 (selection for the specialist), bS − m for α = 1 (selection depends on which resource is more abundant), and bS for α > 1 (selection for generalist).
The second derivative is given by
All terms in this equation are always positive other than the (1/α − 1) and (α − 1) terms. One can see that if α > 1 (convex tradeoff), the curvature of the adaptive landscape will be negative (evolutionary maximum), if α = 1 (linear tradeoff), it will be zero (neutral evolutionary point), and if α < 1 (concave tradeoff), it will be positive (evolutionary minimum).
To show that two specialists are stable when the tradeoff is concave (α < 1), we can evaluate the limit of the fitness gradient with two resident specialist strategies, as each specialist point is approached. The right hand side (resource 1 specialist) evaluates to m. The left hand side (resource 2 specialist) evaluates to –∞.
Rights and permissions
About this article

Cite this article
Orlando, P.A., Hall, S.R. How do generalist consumers coexist over evolutionary time? An explanation with nutrition and tradeoffs. Theor Ecol 8, 383–398 (2015). https://doi.org/10.1007/s12080-015-0257-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12080-015-0257-9