
Abstract
In the present work a novel rear suspension for motorcycles, able to achieve the required progressiveness in terms of rigidity by using a constant-stiffness spring and an innovative compact mechanism, is studied. The key component is an eccentric system inserted in the shock absorber head. As reference, the rear suspension of the Ducati Multistrada MY 2010, characterized by the use of a variable-stiffness spring, is analyzed. The aim of the paper is to prove that the novel proposed solution can obtain a response, in terms of wheel load, similar to that of the reference system. At first, a mathematical model to simulate the kinematics of the novel suspension is presented. This model is able to evaluate the influence of geometric dimensions of the components, checking successfully the ability to reproduce the behavior of the original suspension. After the preliminary design, the kinetostatic model is included within an optimization algorithm ad-hoc created to obtain the optimum dimensions of each component. In order to obtain the inertial parameters, two 3D models of both the suspensions are created. Finally, two multibody models of the two suspensions are implemented in Adams environment in order to evaluate their dynamic behaviour. Results confirm the goodness of the novel solution being comparable to the reference one in terms of dynamic response during the simulation of a typical experimental test performed in Ducati.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
An important issue in vehicle suspensions design is to maximize comfort by reducing vertical acceleration of passenger seats. To achieve this goal rear motorcycle suspensions should have a progressive overall stiffness. A progressive behavior can be obtained by connecting a non-constant stiffness spring directly to the swing-arm or using a mechanism with a constant stiffness spring. In motorcycles, such mechanisms are usually planar, i.e. four-bar linkages, and placed between the rear wheel swing-arm and the rear spring-damper to achieve a non-constant wheel rate [1]. There are various types of motorcycles rear suspensions for [2,3,4] that have different solutions to obtain the required progressiveness of response in terms of rigidity. Such solutions can be divided into two groups: those who obtain such progressivity using variable-stiffness springs [5] with the shortening of the shock absorber proportional to the movement of the wheel relative to the frame [6] and those based on fixed-stiffness springs that resort to mechanisms which allow to change the law of shortening [7]. Generally, these mechanisms include relatively bulky and heavy components while the variable-stiffness springs are significantly more complex than their counterpart with constant stiffness is.
Performance evaluation of a suspension is extremely subjective. Passenger’s judge is based on personal feelings. However, there are some objective criteria to quantify performance of a suspension for vehicles and one of these is the vertical acceleration. In several studies [8, 9], it has been shown that acceleration is the main parameter directly connected to driver’s feeling of comfort.
In the last decade, several studies have been carried out in order to obtain ever more accurate mathematical models of two wheels vehicles. In this context, relevant papers pertain to multibody modelling [10,11,12,13,14,15,16]. More recently, the multibody codes applied to motorcycles dynamics have been employed to optimise existing systems [17, 18] or virtually test new projects [19, 20], saving time and money.
In a previous work, using an integrated approach [21], the authors presented a novel rear suspension for motorcycles, able to achieve the required progressiveness in terms of rigidity by using a constant-stiffness spring and a compact mechanism [22]. Here, by means of multibody analysis, that solution is further investigated.
This work focuses on “Interactive Re-design” [23, 24] of a novel motorcycle rear suspension. Contrary to “Interactive design” [25,26,27,28], in the re-design the designer, starting from an existing object, carries out a novel product optimizing the physical and functional properties by means of interactive/integrated simulations and analyses. The design and analysis activities are today carried out through different tools and by different users. Consequently, time necessary for product design/analysis phases are long, and may be definitely reduced by means of optimization and integration of tools and methodologies. In particular, the new suspension is developed using integrated tools: Reverse Engineering (RE), Computer Aided Design (CAD) and Computer Aided Engineering (CAE). This virtual prototype approach helps reduce development times and typical motorcycle industry run tests (assembly, structural, fatigue, etc.) before the product is built.
The paper is organized as follows. In section Methods, the description of the proposed solution and its mathematical model are presented. After the preliminary design, the kinetostatic model is included within an optimization algorithm ad-hoc created to obtain the optimum dimensions of each component. In order to obtain the inertial parameters, two 3D models of both the suspensions are created. Finally, two multibody models of the two suspensions are implemented in Adams environment in order to evaluate their dynamic behaviour. In section Results, the novel solution is compared to the reference one in terms of dynamic response during the simulation of Leyni’s test bench used in Ducati.
2 Methods
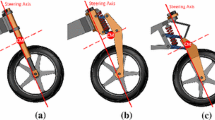
The basic idea of the present work is to obtain a novel and compact rear suspension with a single-stiffness spring. Besides, the proposed suspension, thanks to an eccentric mechanism, must be able to reproduce the Wheel Load (WL)/Wheel Travel (WT) curve of a suspension with variable-stiffness spring. The performance of the WL depends essentially on the stiffness of the spring and on the Lever Ratio (LR) of the suspension. The latter is the ratio between the increments of the Wheel Ordinate (WO) and of the shock absorber length. Usually, suspensions are required to respond with increasing stiffness to increasing WO. In many suspensions, like the one referred here as the reference suspension, such an effect is obtained thanks to a spring, which varies its rigidity in correspondence of a certain value of WO; this implies that two lines with different slopes represent the trend of the WL in terms of WT. The novel suspension is required to have similar progressivity but using a single-stiffness instead of a double-stiffness spring. A constant-stiffness spring requires that the progressivity of the load must be given by the geometry and, in particular, by a very marked decrease of LR for growing values of WT. In this way, a non-linear trend of WL, being able to approximate the double linear behavior of the original suspension, can be obtained. Mechanical systems generally adopted for this purpose have the drawback of providing bulky and heavy components. Here, an eccentric link pivoted to the frame and inserted into the shock’s head is proposed. In this way, it is possible to obtain the wanted variation of LR with reduced overall dimension. The system layout is shown in Fig. 1, where the eccentric link is schematically indicated and external constraints are relative to the frame. As can be seen in the figure, the pivot constrained to the frame is achieved through the eccentric component linked to the damper’s head, in turn attached to the head of the connecting rod. The latter is connected to the damper’s base. Thanks to this mechanism, WL corresponds to the shortening of the damper length with a variable LR. In particular, LR is mainly determined by the ratio between the distances of the pivot point to the damper and to the connecting rod heads.

Layout of the novel suspension system

Schematic methodology
The methodology used in the paper is summarized in Fig. 2. The idea behind the methodology can be extended to other design problems as it is based on a standard procedure with the following steps: start from a reference system; consider some modifications of its components; study the new system and its characteristics in terms of kinematics, dynamics, structural verifications and so on; choose the optimization variables and what is to be optimized; re-model the new system; test and validate the novel system; if necessary, introduce modifications to the system and repeat the optimization until the requirements are fulfilled.
As it can be observed, the reference suspension is substituted by a novel one with single-stiffness spring and eccentric mechanism. The kinetostatics analysis, using Matlab software, allows to obtain the WL/WT curve and then, by comparison with the reference curve, the error is minimized through a constrained optimization procedure. Then, the optimized geometry is used to design a 3D model. Finally, by means of the geometries and the inertial parameters obtained by the 3D models of the novel and reference suspensions, two Adams models are created. These models are compared when the motorcycle must pass obstacles placed on the road in order to evaluate their dynamic behaviour.
2.1 Kinetostatics
To assess the solution feasibility and to analyse the influence of geometrical parameters on the suspension behavior, a mathematical model has been developed. The latter simulates the inverse positioning problem giving the location of all points of the mechanism, plotted in Fig. 3, for an assigned wheel position. In Fig. 3, the angles characterizing the eccentric component and the fixed lengths, that geometrically describe the novel suspension, are marked with green points; the variables that identify the positioning in space of the mechanism are blue-coloured. Reference system, centered at swing arm-frame hinge, is shown in red colour. The fundamental reference parameter, which is taken as input data for the inverse positioning problem, is WO. The spring with variable length HG is in series with a prismatic joint between elements HG and CH. Points C, H and G must necessarily remain aligned during the motion, as all belonging to the damper. The circles represent the revolute pairs while the prismatic one is represented through a rectangle. The link EFG is the eccentric link hinged to the frame at point F and connected to the damper head at point G. Finally, point E is linked to the connecting rod. The system is characterized by having only one degree of freedom (dof), as obtained from the application of the Grübler’s formula for planar mechanisms. Consequently, by setting the WO value, it is possible to know the location of all system points. The non-linear system solution, representing the relationships between the geometric variables, has been obtained using the Matlab software. By defining the range of variation of WO, the code solves the mechanism for all the desired configurations, as shown in Fig. 4.

Kinematics and notation of the mechanism

Inverse positioning problem solutions varying WO
Then, static forces, which the suspension components are subjected to during operation, have been computed. The calculation has been made by considering different configurations assumed by the mechanism and imposing the following parameters: spring stiffness (K), spring preload and the force produced by gas inside the damper.
Then, considering the spring at rest when the damper is completely extended, let \(l_{d}\) be the damper elongation, w.r.t. the rest condition length \(l_{0}\). By means of the principle of virtual work, it is possible to equal the work done by external forces (in this case only the vertical force \(F_{B}\) applied to the wheel) to that performed by internal forces, i.e. the elastic force \(F_{el}\), obtaining:
For each configuration, the values of \(\hbox {F}_{B}\) and \(\hbox {F}_{el}\) are the input data from which to obtain the entire system of forces. Then, considering static conditions, the value of WL, coming from the subsequent application of a load \(F_{pr}\) representing passengers and luggage, must be defined.

Static equilibrium under a load \(F_{pr}\) acting at the saddle position
Referring to Fig. 5, considering the motorcycle in static equilibrium under the F\(_{pr}\) application, the balance of moments, w.r.t. the theoretical point of contact between the front wheel and the ground, is obtained through the expression:
where:
-
i = motorcycle wheelbase
-
a = distance, measured along the x-axis, between \(F_{p}\) application point and the rear wheel-ground plane contact point
-
p = distance, measured along the x-axis, between the centre of gravity G and the rear wheel-ground plane contact point
-
\(F_{p}\) = motorcycle weight force
-
\(F_{pr}\) = load applied at the seat position

WL/WT comparison between the proposed and the original suspensions
2.2 Optimization
In this section, a constrained optimization algorithm, to better approximate the behavior of the reference suspension, has been implemented. Some restrictions are considered in what follows: parts flexibility is not included being the links modeled as rigid bodies; the optimization is based only on the kinetostatic analysis without considering, at this stage, dynamic effects.
The target defined for the optimization algorithm is the minimization of the distance, calculated along the ordinate axis, between the graphs WL/WT of the novel and reference suspensions, in correspondence of the value of WT in which the original suspension changes its stiffness. As constraints for the novel mechanism curve, the passage for the end-points has been imposed.
Optimum parameters of the novel suspension able to approximate the behaviour of the original suspension have been identified and reported in Table 1.
Figure 6 respectively reports the comparison between the curves representing the WL of the novel and original suspensions. As it can be observed, results of the proposed suspension are in very good agreement with the original suspension results (maximum error about 3.8%). It should be also noted that, while the original suspension is characterized by a curve with a discontinuity in correspondence of the change of spring stiffness, the novel suspension continuously varies its rigidity.
The optimal parameters are used to design the 3D model and to build the Adams model, as it will be described in the following sections.
2.3 3D modeling
Once the novel suspension has been verified from the point of view of kinetostatics, a 3D CAD model has been created using the commercial software Autodesk Inventor. In analysing the suspension from the structural point of view, only maximum static loads have been considered. The material chosen for the components is Avional 14, an aluminum alloy having Young modulus E = 72,500 MPa and yield tension \(\sigma _{sn} = 345\) MPa. This choice was made because this material is commonly used in Ducati component manufacturing. Finally, tensions for each component due to maximum loads have been calculated. All tests carried out have shown that the components are subjected to tensions significantly under yield tension with safety factors greater than 3. The final suspension 3D model bounded to the swing arm is shown in Fig. 7.

Final render model of the novel suspension
2.4 Multibody analysis
In order to assess the dynamic behaviour of the suspension subjected to time-varying stresses coming from road hazards, in a previous work [24], the authors implemented, in Simulink environment, two lumped models for the proposed and reference suspensions. In particular, they adopted a Half-Vehicle model that describes the vertical dynamics of half vehicle, focusing the analysis on the rear wheel and on its suspension system.
In this work, in order to compare the dynamic behaviours with more precision, two Adams multibody models, the first of the original suspension (Fig. 8a) and the second of the novel suspension (Fig. 8b), have been developed.

Multibody model of the original suspension (a) and the novel suspension (b)
The moments of inertia, masses and geometrical distances of all parts to include in the multibody simulations have been taken from the 3D CAD models.
Considering the main role of the tires in the dynamic behaviour of a motorcycle taking on bumps, their modelling has been done very accurately. The forces generated between the road and the tires determine mainly the movements of the motorcycle. In this work, for the interaction between the road and the tire, the Adams PAC2002 tire model has been used; it is based on the MAGIC-FORMULA [29] with belt dynamics characterization and it is recommended for the simulation of obstacles overcome manoeuvres along straight lines (low camber). In fact, it has been observed that this kind of modelling realistically reproduces the dynamic behaviour of the motorcycle when the wavelength of the street obstacles is bigger than the tire radius. It is noteworthy that the model has been optimized to study the vertical dynamics. The lateral dynamics has not been considered in this work and could be of interest for future developments.
The reference suspension stiffness has been implemented by means of a spline while being constant in the novel suspension. Considering the damping, the characteristic curve of the original suspension, shown in the Fig. 9, has been implemented in both simulations.

Damping curve implemented in Adams
The starting configuration is with the suspension completely extended in both cases. Then, a relative movement in the vertical direction between the road and the frame is imposed, in order to compress the suspension considering the desired preload, depending on the weight of the passenger/s and luggage. Finally, horizontal movement, with a constant velocity of 45 km/h, is applied to the moving frame in order to make the tire take on several trapezoidal bumps of the same height (30 mm).

Wheel center vertical displacements: reference versus novel system

Wheel center vertical acceleration: reference versus novel system
3 Results
In the following, the results coming from the comparison of the two Adams models are reported. The simulations are carried out with both suspension systems performing the Leyni’s test bench. In Fig. 10 the vertical displacements of the rear wheel centers are displayed. The ordinate value is the height of the wheel axes from the ground, besides the bump and road references are also drawn using dotted horizontal lines. The road reference ordinate is the undeformed wheel radius while the bump reference is obtained by adding the height of the obstacles (30 mm) to the road reference. These two references allow to highlight suspensions and tires deformations.
As it can be observed, a road profile with four bumps is modeled. When the systems go down the straight the rear wheel centers maintain below the road reference height due to the wheels deformation under the resulting static vertical weight of 2700 N coming from half-vehicle, driver, passenger and luggage weights.
Approaching the obstacles, an ideal system should retrace the bump profile but instead, dynamic effects and flexibility push the wheel higher and lower than the bump reference profile. In particular, the higher spikes are consequence of the impacts while the negative spikes are due to suspensions and tires flexibility during rebound. On impact with a bump, both the systems keep in contact with the road and do not surpass the bump reference. Even in this case, the distances between the maximum points and the bump reference are the tires deformation outcome.
It may be recognized as the novel proposed system shows reduced peaks when compared to the reference suspension (about 13% lower). This behaviuor is mainly due to the progressivity and smoothness generated in the WL/WT curve.
This tendency is further enhanced in Fig. 11 reporting the wheel center vertical accelerations of the two systems. The proposed suspension shows a reduction of 7% than the reference one. This aspect is positive as lower accelerations may increase components life as well as greater comfort for the rider and passenger.
4 Conclusions
A novel rear suspension for motorcycles has been presented. A compact eccentric mechanism allows reproducing the same characteristics of the variable stiffness spring Ducati Multistrada MY 2010 suspension, taken as reference. The novel mechanism has been optimized to yield the same response in terms of wheel load/wheel travel. Furthermore, the progressiveness of such curve can be changed varying the geometric parameters of the mechanism revealing great flexibility in the design process. The optimization has been followed by a design stage aimed to develop a compact design demonstrating that the increased complexity does not imply a severe change in the mass budget. Then, the reference suspension and the novel one have been modeled using Adams and compared during the Leyni’s test bench. The results have revealed that the vertical displacements and accelerations of the two models are comparable and that the novel suspension offers improved dynamic performances than the reference suspension in terms of comfort. Moreover, the presence of a constant stiffness spring, the continuity in the wheel load/wheel travel curve and the compactness of the linkage mechanism, make this system promising for future developments and manufacturing. Future studies will regard investigations about the handling behavior of the novel suspension.
References
Noriega, A., Mántaras, D.A., Blanco, D.: Kinetostatic benchmark of rear suspension systems for motorcycle. In: Petuya, V., Pinto, C., Lovasz, E.C. (eds.) New Advances in Mechanisms, Transmissions and Applications. Mechanisms and Machine Science, vol. 17. Springer, Dordrecht (2014)
Cossalter, V.: Motorcycle Dynamics. 2nd edn. Lulu. com (2006)
Cossalter, V., Lot, R., Massaro, M.: Motorcycle Dynamics. Modelling, Simulation and Control of Two-Wheeled Vehicles. Wiley, Hoboken (2014)
Uberti, S., Copeta, A., Baronio, G., Motyl, B.: An eco-innovation and technical contaminated approach for designing a low environmental impact off-road motorcycle. Int. J. Interact. Des. Manuf., 1–15 (2017)
Sequenzia, G., Oliveri, S., Calabretta, M., Fatuzzo, G., Cali, M.: A new methodology for calculating and modelling non-linear springs in the valve train of internal combustion engines. SAE Technical Papers (2011)
Bradley, J.: The Racing Motorcycle: A Technical Guide for Constructors. Gearing, Geometry, Aerodynamics and Suspension. Broadland Leisure Publications, Whitby (1996)
Croccolo, D., De Agostinis, M.: The rear suspension equilibrium. In: Motorbike Suspensions. Springer Briefs in Applied Sciences and Technology, pp. 17–31. Springer, London (2013)
Jazar, R.N.: Vehicle Dynamics: Theory and Application. Springer, Berlin (2013)
Cossalter, V., Doria, A., Garbin, S., Lot, R.: Frequency-domain method for evaluating the ride comfort of a motorcycle. Veh. Syst. Dyn. 44(4), 339–355 (2006)
Sharp, R.S., Evangelou, S., Limebeer, D.J.N.: Multibody aspects of motorcycle modelling with special reference to autosim. Adv. Comput. Multibody Syst. 2, 45–68 (2005)
Limebeer, D.J.N., Sharp, R.S.: Bicycles, motorcycles, and models. IEEE Control Syst. 26(5), 34–61 (2006)
Meijaard, J.P., Popov, A.A.: Numerical continuation of solutions and bifurcation analysis in multibody systems applied to motorcycle dynamics. Nonlinear Dyn. 43(1–2), 97–116 (2006)
Calì, M., Oliveri, S.M., Sequenzia, G.: Geometric and multibody modeling of rider-motorcycle system. In: 20th European Modeling and Simulation Symposium, EMSS 2008, pp. 780–787 (2008)
Barbagallo, R., Sequenzia, G., Oliveri, S.M., Cammarata, A.: Dynamics of a high-performance motorcycle by an advanced multibody/control co-simulation. In: Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, vol. 230(2), pp. 207–221 (2016)
Cammarata, A., Angeles, J., Sinatra, R.: The dynamics of parallel Schönflies motion generators: the case of a two-limb system. In: Proceedings of the Institution of Mechanical Engineers, Part I: Journal of Systems and Control Engineering, vol. 223(1), pp. 29–52 (2009)
Callegari, M., Cammarata, A., Gabrielli, A., Sinatra, R.: Kinematics and dynamics of a 3-CRU spherical parallel robot. In: ASME 2007 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. American Society of Mechanical Engineers, pp. 933–941 (2007)
Oliveri, S.M., Sequenzia, G., Calì, M.: Flexible multibody model of desmodromic timing system. Mech. Based Des. Struct. Mach. 37(1), 15–30 (2009)
Sequenzia, G., Oliveri, S.M., Fatuzzo, G., Calì, M.: An advanced multibody model for evaluating rider’s influence on motorcycle dynamics. In: Proceedings of the Institution of Mechanical Engineers, Part K: Journal of Multi-body Dynamics, vol. 229(2), pp. 193–207 (2015)
Calì, M., Oliveri, S.M., Sequenzia, G.: Geometric modeling and modal stress formulation for flexible multi-body dynamic analysis of crankshaft. In: 25th Conference and Exposition on Structural Dynamics 2007, IMAC-XXV, pp. 1–9 (2007)
Calì, M., Fatuzzo, G., Oliveri, S.M., Sequenzia, G.: Dynamical modeling and design optimization of a cockroach-inspired hexapod. In: 25th Conference and Exposition on Structural Dynamics 2007, IMAC-XXV, pp. 1–10 (2007)
Nadeau, J.P., Fischer, X.: Research in Interactive Design: Virtual, Interactive and Integrated Product Design and Manufacturing for Industrial Innovation, vol. 3. Springer, Berlin (2011)
Di Gironimo, G., Franciosa, P., Gerbino, S.: A RE-CAE methodology for re-designing free shape objects interactively. Int. J. Interact. Des. Manuf. 3(4), 273–283 (2009)
Sequenzia, G., Fatuzzo, G., Oliveri, S.M., Barbagallo, R.: Interactive re-design of a novel variable geometry bicycle saddle to prevent neurological pathologies. Int. J. Interact. Des. Manuf. (IJIDeM) 10(2), 165–172 (2016)
Barbagallo, R., Sequenzia, G., Cammarata, A., Oliveri, S.M.: An integrated approach to design an innovative motorcycle rear suspension with eccentric mechanism. In: Advances on Mechanics, Design Engineering and Manufacturing, Lecture Notes in Mechanical Engineering, pp. 611–620 (2016)
Fischer, X., Coutellier, D.: Research in interactive design. In: Proceedings of Virtual Concept 2005. Springer, Berlin (2006)
Dupé, V., Briand, R.: Interactive method for autonomous microsystem design. Int. J. Interact. Des. Manuf. (IJIDEM) 4(1), 35–50 (2010)
Di Gironimo, G., Labate, C.V., Renno, F., Siuko, M., Lanzotti, A., Crisanti, F.: An interactive design approach for nuclear fusion purposes: remote handling system for FAST divertor. Int. J. Interact. Des. Manuf. (IJIDEM) 8(1), 55–65 (2014)
Barone, S., Casinelli, M., Frascaria, M., Paoli, A., Razionale, A.V.: Interactive design of dental implant placements through CAD-CAM technologies: from 3D imaging to additive manufacturing. Int. J. Interact. Des. Manuf. (IJIDEM) 10(2), 105–117 (2016)
Pacejka, H.: Tire and Vehicle Dynamics. Elsevier, New York (2005)
Acknowledgements
The authors would like to thank Eng. Simone Di Piazza and Eng. Stefano Isani from Ducati Motor Holding SpA for their support. They also thank Senior Project Manager of MSC.Software Eng. Daniele Catelani for the helpful suggestions about multibody modelling.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Barbagallo, R., Sequenzia, G., Cammarata, A. et al. Redesign and multibody simulation of a motorcycle rear suspension with eccentric mechanism. Int J Interact Des Manuf 12, 517–524 (2018). https://doi.org/10.1007/s12008-017-0402-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12008-017-0402-3