
Abstract
Strandings of marine mammals, seabirds, and marine turtles in coastal areas can provide valuable information on their ecology. However, gathering information by field teams often incur high costs and effort. This study evaluated the effectiveness of an Unmanned Aerial Vehicle (UAV) to detect stranded animals during beach monitoring programs. The study was carried out between 2016 and 2017 evaluating factors related to the UAV (height and camera angle) and the beach (morphology). Data obtained from the UAV was compared with the traditional method of in situ teams. A total of 120 aerial surveys were conducted on four beaches on the coast of Santa Catarina, Brazil. Eighteen carcasses were recorded by both methods, traditional methodology and UAV. However, six other events were only recorded by in situ monitoring (traditional method) and one event recorded only by the UAV. The time interval between the beach monitoring by the two strategies is probably responsible for the differences. Despite obtaining high-quality aerial images and easily identifying strandings, the UAV cannot completely replace the traditional method due mainly to the impossibility to fly in adverse weather conditions such as high winds and rain. On the other hand, UAVs can complement the data collection information, with less consumption of fossil fuels and damage to the coastal environment.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Marine animals inhabiting coastal environments suffer many anthropic pressures, such as pollution, vessel traffic, and accidental capture in fishing nets (Crespo et al. 1997; Pontalti and Danielski 2011; Zappes et al. 2013; Meager and Sumpton 2016). Stranding records are one of the tools that have allowed these effects to be evaluated through the analysis of carcasses and, ideally, the identification of causes of death. Due to the possibility of assisting in the detection of acute and chronic impacts in marine animals (e.g. Williams et al. 2011; Fox et al. 2016; Haney et al. 2017; Smith et al. 2017; Balmer et al. 2018), systematic monitoring of stranding events are considered one of the most important biological data sources for research.
In this sense, several organizations run projects that conduct surveys in coastal areas searching for marine tetrapods (birds, mammals, and reptiles) strandings. However, the implementation and maintenance of these projects are not straightforward and can have extremely challenging logistics. Beach monitoring requires high financial investments, time, and skilled teams. Technological advances, such as Unmanned Aerial Vehicles (UAVs) have helped to solve some of the challenges found when working in the environment (Rees et al. 2018). UAVs have been effective for several animal conservation studies (Kudo et al. 2012; Pomeroy et al. 2015; Weissensteiner et al. 2015; Schofield et al. 2019), becoming a popular platform used by researchers. Their responses are often faster, more effective, and can monitor areas that are hard to reach (Jones et al. 2006; Watts et al. 2012; Vermeulen et al. 2013; Goebel et al. 2015; Sweeney et al. 2015; Kelaher et al. 2019). Thus, UAVs are presently recognized as a valuable tool that can potentially complement and improve many conservation programs (Koh and Wich 2012; Hodgson et al. 2013; Fettermann et al. 2019; Christie et al. 2016).
In Brazil, the use of UAV in animal conservation is still incipient (Barros and Leuzinger 2019) and only a few scientific studies have evaluated their use in the marine environment, even if the use of images and videos obtained by them are becoming a common tool among researchers in conservation studies. Thus, this study is among the first to specifically evaluate the use of UAV for stranding monitoring activities. Its objective was to evaluate whether a UAV could optimize the stranding monitoring activities of the Santos Basin Beach Monitoring Project (‘Projeto de Monitoramento de Praias da Bacia de Santos’, PMP-BS 2019). The PMP-BS is part of the monitoring programs implemented by PETROBRAS, the largest oil company operating in the area, to license the oil and natural gas production and transport from the pre-salt province of the Santos Basin (25°05’S 42°35’W to 25°55’S 43°34’W) between 2100 and 2300 m isobaths. Since 2015, the PMP-BS has been regularly monitoring almost 1500 km of coastline to assess strandings of marine fauna.
Materials and methods
Study area
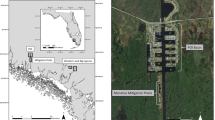
The present study occurred in the Garopaba region (28°1’25"S 48°36’50"W), located in the south-central part of Santa Catarina, Brazil. Beaches located in this region are monitored daily by the PMP-BS team since August 2015 in search of stranded marine tetrapods. Aerial surveys with the UAV were conducted in four beaches: Garopaba, Siriú, Silveira, and Ferrugem (Figs. 1 and 2). These locations were selected considering the number of strandings recorded previously by the PMP-BS, and also to sample different morphodynamic profiles. Considering the Wright and Short (1984) classification, the beaches of Garopaba and Siriú have dissipative profiles, with extensions of 2 and 5 km respectively; Silveira beach has a reflective profile and is 1.5 km long, and Ferrugem beach has an intermediate profile and is also 1.5 km long.

Map of the study area indicating the 4 monitored beaches (red), where UAV and traditional surveys were evaluated

Aerial photo of the 4 monitored beaches: a Garopaba Beach, b Siriú Beach, c Silveira Beach, d Ferrugem Beach
Traditional beach survey & data collection
Traditional beach monitoring was conducted in the early morning along the full length of the beaches, using four-wheeled ATVs (‘quad’), trucks, or on foot. However, each beach always used the same monitoring method. Truck or quad access to the beaches was mainly through existing tracks in the dunes. The maximum speed during monitoring was 40 km/h, surveying the full sand strip with the naked eye. When an animal was found, the field team identified the species, assessed its condition (alive or dead), and took pictures of it with a digital camera. After these initial procedures, the appropriate measures are taken according to each situation. If the animal is dead, biometrics are carried out and the carcass is collected. If the animal is alive, and veterinary care is needed, the animal is taken to a rehabilitation facility. For each monitoring effort, the PMP-BS team records the starting and finishing date and times, together with the number and species of stranded animals, using standard forms either on paper or on tablets with electronic forms. All collected data is afterward uploaded to the Aquatic Biota Monitoring Information System - SIMBA (‘Sistema de Monitoramento da Biota Aquática’ (n.d.), at http://simba.petrobras.com.br), an online database that manages all data generated by the PMP-BS.
Aerial survey & data collection
UAV operations were conducted before the traditional beach monitoring early in the mornings. Different teams conducted the traditional and aerial surveys, with no contact or communication at the day, to prevent them from being influenced by the detections made from the other team. The UAV used was the DJI Phantom 3 Professional, which is powered by four rotors, and equipped with a DJI camera attached to a gimbal. This camera was a Sony EXMOR with a 1/2.3-inch sensor, 12.3 MP resolution, with the ability to record videos in Ultra HD resolution. It was controlled from the ground station through the DJI GO application provided by the manufacturer.
The UAV flew over the beach for 2 km from the operator. On beaches with less than this range (Ferrugem, Garopaba, and Silveira) the whole beaches were monitored, while on Siriú, approximately half the beach was monitored. To compare with the traditional monitoring, only records within this area were considered. The flights were conducted following the safety standards of the Brazilian Airspace Control Department (ANAC), by an experienced pilot who supervised the images on a cell phone or tablet, and one assistant who visually monitored the equipment during the flight. The aircraft was manually launched by the pilot at the beginning of each beach and returned using the “return to home” configuration, which automatically brought the equipment to the starting point. During the course, the UAV transmitted live video to the ground station, making it easier to locate the target. Videos and photos were taken during the survey and analyzed later in the laboratory.
When a stranding event was spotted, the UAV was stopped, the altitude was reduced, and photos were manually taken to record the carcass. In this way, it was possible to capture the geographic coordinate of each event and high-resolution images for animal identification. Flight speed was constant and low, of approximately 20 km/h or less, to avoid blurring and obtain high-resolution images. The flights were conducted with winds of no more than 36 km/h, following the manufacturer’s instructions, and were only performed in good weather conditions, with no rain. For safety reasons, flights were finished when batteries had less than 50% charge.
Flight parameters
Before the actual aerial surveys were conducted, 24 flights (4.25 h) were performed to determine the ideal flight parameters for the study: optimal altitude, flight duration, stability in different wind conditions, and image quality. To evaluate these, the UAV flew over a 20 cm-long object and photographs were taken with the camera at 90° relative the ground, at heights of 5 m, 10 m, 15 m, 20 m, 25 m, and 30 m. This procedure aimed to find the ideal height for detections, considering small seabirds that are approximately 20 cm in total length. With the UAV in movement it was possible to verify that when the camera was slightly tilted forward, between 30º and 45º, the field of view was considerably expanded in the direction of the flight, increasing flight safety, but still without losing image quality.
Data analysis
To evaluate the efficiency of the UAV in detecting stranded animals in comparison to the traditional methodology, data from the field teams were compared with data extracted from the UAV imagery. For this, date, time, number, and species of stranded animals were acquired from the SIMBA database.
To evaluate the effectivity of the UAV in monitoring the beach, weather and environmental conditions (air temperature, rain, cloud cover, wind speed, sea state, swell and tide) for the study period were extracted from the National Institute of Meteorology online database (INMET 2017). Data were extracted from the nearest weather station, in Laguna - Farol de Santa Marta (code. INMET: A866; Code. OMM: 86,972), located 80 km from the monitored beaches.
Results
Aerial surveys were performed between September 2016 and September 2017. The twenty-four test flights (4.25 h) performed in 2016 were used to test the equipment and to determine the ideal parameters to be used in the field collections. A total of 120 flights were conducted in 2017, 30 in each of the four beaches, generating 194 videos, with a total of 13.04 h of footage.
Flight parameters
Results from the test flights showed that the UAV flying between 7 and 8 m was the optimal altitude for our study. The high-quality footage allowed detections of small animals such as ghost crabs (Ocypode spp.), sand dollars (Suborder Clypeasterina), as well as algae, fishes, and pieces of plastic debris.
UAV operations could not be performed during strong winds (> 36 km/h) due to instability, and on rainy days as the model of UAV was not waterproof. Environmental variables such as sea and tide condition, presence of waves, wind direction, luminosity, cloud cover, sun reflection, and beach width did not affect recording information. Comparing the beaches’ morphological profiles, it was noticed that on beaches with less inclined (dissipative) profiles it was easier to detect small objects when comparing beaches with intermediate or reflective profiles. However, this difference in beach morphology did not interfere with larger animals such as marine tetrapods.
During the 365 days when the surveys were performed, beach monitoring (traditional beach survey) could not be conducted only on a single day, due to an unusually high tide that made it impossible for the vehicle to drive along the sand strip. By analyzing the weather on the same 365 days, it would be possible to operate the UAV in at least 146 days, as 105 days had rain, and on the remaining 260 days without rain, 132 presented wind gusts with speeds greater than 36 km/h, exceeding its operational parameters. However, this was a minimum estimation of days that the UAV could be operated, as the maximum wind speed occurred as gusts and the presence of rainfall are usually limited to certain locations and periods of the day.
Detectability of stranded animals
To evaluate the detection and identification rates of the animals in the two methodologies, the numbers of stranded animals in each methodology were compared, regardless of the physical integrity of the carcasses. Traditional monitoring recorded 24 occurrences of marine tetrapods and aerial monitoring noted 19 occurrences, of which 18 were also recorded by traditional monitoring (Table 1). All animals identified by UAV monitoring were dead: nine green turtles (Chelonia mydas), nine Magellanic penguins (Spheniscus magellanicus), and one kelp gull (Larus dominicanus) (Fig. 3).

Aerial images of stranded animals recorded by the UAV: a seagull; b magellanic penguin, c and d green turtles
Six stranding events were detected by traditional monitoring but not from the UAV. Of those, two animals were alive (one neotropical cormorant, Phalacrocorax brasilianus; one kelp gull) and four were dead (three green turtles, one Magellanic penguin). The live animals were sighted about 3 h after the UAV survey and it can be assumed that they must have arrived at the beach during this time interval. For the dead animals, they were sighted by the traditional monitoring approximately 2 h after the UAV flew over the beach. As the records from the traditional monitoring were recovered from the SIMBA database posteriorly to the UAV monitoring, the videos recorded on those days were watched again, and no animals were identified, confirming that they arrived after the UAV passed. Only one record was detected by the UAV alone, which was of a dead Magellanic penguin at Siriú beach. In this case, the traditional monitoring surveyed the beach 2 h after the aerial survey. The beach survey team may have missed the animal or it may have been removed from the beach due to tide change. When the UAV monitored the area, the tide was high, so the animal may have been taken to sea with the lowering tide.
Field work time
The average time to survey the area was calculated for both methods, traditional and UAV, in the presence and absence of stranded animals (Fig. 4). Except for Silveira beach, the UAV was faster than the traditional survey to monitor the areas when there were no stranded animals, and these differences were in most part statistically significant (T-test; Table 2). When a stranding event occurred, the traditional method took longer to finish the monitoring, due to the need to perform measurements and collect the carcass or even to rescue a live animal. Thus, in these cases the monitoring time depended on the size and condition of the animal, resulting in much greater variation. The aerial survey was quicker and did not exhibit such large variations in the case of a stranding event, as it only took photos of the animal.

Average monitoring time for both methodologies, separated by the occurrence or absence of stranded animals
The preparation time to start the monitoring, which consists of assembling the UAV before each flight (connection of the radio control cable on the tablet/cell phone, adjustments of the propellers, connect the equipment and wait for the reception of the satellite signal), was approximately 1 min. In contrast, traditional monitoring using the quad ATV is approximately 10 min, which includes the time to take the vehicle out of the trailer, drive up to the starting point, and turn the GPS on. Even though this time was not added to the monitoring time in the analysis, it must be considered when selecting a specific methodology.
Effects caused by different methodologies on the beaches
To carry out the traditional, land-based method, the vehicles access the beaches passing through ‘restinga’ (sandbank) vegetation, which may negatively impact this environment in the long term due to sand compaction (Fig. 5). In contrast, this factor is not present in the aerial methodology because the UAV can take off from any point, with minimal disturbance to the surrounding area.

Vehicles during monitoring activities. a ATV (quad bike); b access trail used by the ATV to reach the beach
Regarding the noise produced and potential disturbance to live animals at the beach, it was observed that with the approach of the quad bike or the truck, in all cases, birds that were resting flew away when approached at a distance of approximately 10 m (visually estimated). During the UAV flights, all cases of behavioral disturbance caused by the aircraft on birds were recorded. From the 120 flights, birds were present during 70 of them. In 43% of the cases (n = 30), no behavioral response to the UAV was observed. In cases where the animal reacted to it, the main behavioral responses observed were the animals completely leaving the area when the UAV was approaching (n = 21), or leaving the area but with some degree of curiosity (n = 19). In the latter cases, the animals moved away and then returned to the area to inspect the equipment.
The latter behavior was often observed in kelp gulls, both by groups and solitary animals. The two species that presented the greatest disturbance behaviors during the approach of the UAV were yellow-headed caracara (Milvago chimachima) and American oystercatcher (Haematopus palliatus). Black vultures (Coragyps atratus) and turkey vultures (Cathartes aura) showed little or no disturbance with the presence of the UAV, especially when they were feeding on carcasses (Fig. 6). Also, the southern lapwing (Vanellus chilensis), white-backed stilt (Himantopus melanurus), sanderling (Calidris alba), snowy egret (Egretta thula), and magnificent frigatebird (Fregata magnificens) showed no signs of disturbance with the presence of the UAV. However, on rare occasions they flew away a few meters and after a few seconds returned to land a little further ahead of where they took off.

Vultures’ behaviour with the approach of the UAV: a animal flying around the equipment; b turkey vultures feeding on penguin carcass; c black vultures feeding on green turtle carcass
Discussion
The main aspect to be considered during beach monitoring is the detection of stranded animals. Our study suggests that both methods are equivalent to detect and identify dead or alive animals on the beaches. The few cases that differed between methods, where those were more than 2 h had passed between the monitoring performed by the land-based teams and the aerial survey conducted by the UAV team. The UAV camera provided good images and high-quality videos, being possible to view directly on-screen animals of different sizes, including some relatively small. When the records from the traditional monitoring were obtained, and these records were identified, the videos from these days were reviewed and no animals were found. Thus, the animals recorded only by the traditional monitoring (large seabirds, green turtles, and a penguin) were not due to failure in the detection by the UAV, but to the strandings occurring after the UAV had passed.
The UAV model used in this study is easily available and of relatively low cost. However, the photos and videos generated during the study were considered to be of very good quality, making it easy to identify animals at the beaches. Also, the footage generated by the UAV allowed the creation of a permanent database, where the information is available to be reviewed numerous times and being shared with other researchers for further analysis. However, if this method is used regularly the large amount of information generated daily during the monitoring programs would require a substantial time investment to organize and analyze the data. To address this issue, there are automated programs that have been developed to improve the efficiency of these procedures (Groom et al. 2011; Dehvari and Heck 2012).
All methodologies have positive and negative points and potential limitations should be carefully evaluated. During our study, the UAV presented advantages concerning the effects caused in animals. Some species of birds reacted and showed to be potentially disturbed with the approach of the aircraft, but most of the time no behavioral response to the UAV was observed. On the other hand, birds were always scared away while resting at the beaches and the truck or the quad bike approached. Thus, between the two methodologies, the UAV can potentially cause less impact on animals present at the beach.
Although no live marine animals were seen on the beach while flying, except for birds, flying at altitudes below 10 to 20 m have been shown to interfere in the normal behavior of some animals (Weimerskirch et al. 2018; Rümmler et al. 2018), when they are resting in the sand. Some species of birds are observed to change their behavior due to the sudden occurrence of UAV noise during take-off, but not if the aircraft approaches slowly at constant speeds (Vas et al. 2015; Rümmler et al. 2018).
Studies on behavioral reactions of sea birds to the UAV indicated that 80% of the flights did not seem to disturb the animals, even during flights up to 4 m of altitude, especially when the descent was gradual and at an angle rather than falling vertically over the animal (Vas et al. 2015). With large agglomerations of seabirds, such as in breeding colonies of penguins, the sound generated by the UAVs propellers during flights seems to be comparatively minimal, due to the background noise being louder (Sweeney et al. 2015; Brisson et al. 2017; Rümmler et al. 2018). This could be similar when monitoring beaches, where the noise produced by breaking waves could mask the noise generated by the propellers.
Similar results were observed during an experiment using UAV for aerial imaging in pinniped colonies, where there was little or no behavioral response (Moreland et al. 2015; Adame et al. 2017). However, pinnipeds tend to present a varied behavioral response with the UAV approaches at different altitudes. Reactions to noise may be linked to the reproductive state of the animals and flight speed (Pomeroy et al. 2015; Sweeney et al. 2015). The most documented reactions for seals are adjusting to an upright position and looking at the sky with little or no movement from its initial position (Moreland et al. 2015; Pomeroy et al. 2015; Sweeney et al. 2015). Although unmanned aircraft may cause minor disturbances in animals because they are relatively silent when compared to other types of vehicles, the impacts caused by UAV noise on fauna should be evaluated on a case-by-case basis, as they may vary according to the target species and the equipment used (Sweeney et al. 2015; Vas et al. 2015; Weimerskirch et al. 2018).
When deciding whether to use UAV for beach surveys, not only direct impacts on animals must be considered, but also indirect environmental impacts. An additional benefit to the use of UAV in field studies is the reduced fuel consumption, as well as the reduction of fossil fuel pollution (Goebel et al. 2015) as these aircraft are usually powered by rechargeable batteries. Also, the potential environmental degradation caused by the UAV is practically nil because contact with the substrate is not necessary. In contrast, the long-term impact caused on coastal dunes due to the daily drive of land vehicles (trucks or quad bikes) during the traditional method, can kill the vegetation and intensify soil wear, causing erosive processes that may damage such areas The sand compaction generated by the vehicles’ tires can make the soil more resistant to water penetration, causing physical changes that can affect the pioneer vegetation, dunes formation and even the survival of benthic species (Vieira et al. 2010).
It is important to point out that the passage of vehicles in places where sea turtles nest can compromise the birth of hatchlings by compacting the nests while incubating. Additionally, the tires’ tracks can also increase the travel time of the hatchlings to the sea, reducing the probability of survival (Aguilera et al. 2019). The use of UAV on those locations would reduce the likelihood of disturbing females and nests (Bevan et al. 2015; Bevan et al. 2018; Rees et al. 2018).
A UAV can be a valuable tool for wildlife studies if they are easy-to-use, electrically powered, easy-to-transport, launchable and recoverable in rugged terrain, and operable with minimal training (Jones et al. 2006). Multirotor aircraft can fly in any direction, hover over an object of interest and accurately estimate its position, being extremely useful in field activities.
On the other hand, a factor that restricts the daily use of UAVs in field studies is the weather conditions. The model used in this research, the Phantom 3 Professional, is relatively inexpensive, but cannot operate in strong winds or rain For studies in locations near the sea or aquatic environments, waterproof UAVs are certainly recommended and best suited to operate under high humidity conditions. There are commercially available waterproof models such as the SwellPro Splashdrone (www.swellpro.com), the Quadh2o (www.quadh2o.com) and the ProDrone PD4-AW Quadcopter (www.prodrone.com), among other models that are technologically evolving and would easily overcome this limitation. The UAV used during our study presented internal oxidation in some parts, even being subject to a careful cleaning protocol after each use. We recommend that this should be considered and included in the costs when evaluating using this method.
Studies comparing the efficiency of traditional methods with new potential platforms are fundamental to match new strategies with historical data, which were collected with a substantial expenditure of time and resources. Deciding to use a UAV as a research tool for acquiring information is directly related to the perception of the efficiency of the collections, the cost-effectiveness, the accuracy of the data and the evaluation of whether such aerial equipment brings advantages or not compared to traditional methods (Fettermann et al. 2019; Womble et al. 2020).
Conclusion
Before designing a beach monitoring program using a UAV as a platform, the team should carefully consider the advantages and disadvantages of the different models available. The real-time reception of the videos is limited to the radio’s range, so it is necessary to pay attention to the most appropriate models depending on the research objectives. It is also necessary to consider the local legislation since there are certain restrictions specific to each country and species. Even with these considerations, we observed that UAVs have the potential to become an effective platform for regular beach monitoring. In the present case, it was observed that the use of UAV could complement the data collection on beach surveys that have traditionally been carried out with the use of vehicles, with less consumption of fossil fuels and damage to the coastal environment.
References
Adame K, Pardo MA, Salvadeo C et al (2017) Detectability and categorization of California sea lions using an unmanned aerial vehicle. Mar Mam Sci 33:913–925. https://doi.org/10.1111/mms.12403
Aguilera M, Medina-Suárez M, Pinós J et al (2019) Assessing the effects of multiple off-road vehicle (ORVs) tyre ruts on seaward orientation of hatchling sea turtles: implications for conservation. J Coast Conserv 23:111–119. https://doi.org/10.1007/s11852-018-0641-x
Balmer JE, Ylitalo GM, Rowles TK et al (2018) Persistent organic pollutants (POPs) in blood and blubber of common bottlenose dolphins (Tursiops truncatus) at three northern Gulf of Mexico sites following the Deepwater Horizon oil spill. Sci Total Environ 621:130–137. https://doi.org/10.1016/j.scitotenv.2017.11.209
Barros LSC, Leuzinger MD (2019) O uso de drones como instrumento para a conservação da biodiversidade no Brasil. RDI 16. https://doi.org/10.5102/rdi.v16i2.6164
Bevan E, Wibbels T, Najera BMZ, Martinex MAC, et al (2015) Unmanned aerial vehicles (UAVs) for monitoring sea turtles in near-shore waters. Mar Turtle Newsl 145:19–22
Bevan E, Whiting S, Tucker T et al (2018) Measuring behavioral responses of sea turtles, saltwater crocodiles, and crested terns to drone disturbance to define ethical operating thresholds. PLoS ONE 13:e0194460. https://doi.org/10.1371/journal.pone.0194460
Brisson-Curadeau É, Bird D, Burke C et al (2017) Seabird species vary in behavioural response to drone census. Sci Rep 7:17884. https://doi.org/10.1038/s41598-017-18202-3
Christie KS, Gilbert SL, Brown CL et al (2016) Unmanned aircraft systems in wildlife research: current and future applications of a transformative technology. Front Ecol Environ 14:241–251. https://doi.org/10.1002/fee.1281
Crespo EA, Pedraza SN, Dans SL, Koen Alsonso M, Reyes LM, García NA, Coscarella M, Schiavini CM (1997) Direct and indirect effects of highseas fisheries on the marine mammal populations in the Northern and Central Patagonian Coast. J Northw Atl Fish Sci 22:189–207. https://doi.org/10.2960/J.v22.a15
Dehvari A, Heck RJ (2012) Removing non-ground points from automated photo-based DEM and evaluation of its accuracy with LiDAR DEM. Comput Geosci 43:108–117. https://doi.org/10.1016/j.cageo.2012.02.013
Fettermann T, Fiori L, Bader M et al (2019) Behaviour reactions of bottlenose dolphins (Tursiops truncatus) to multirotor Unmanned Aerial Vehicles (UAVs). Sci Rep 9:8558. https://doi.org/10.1038/s41598-019-44976-9
Fox CH, O’Hara PD, Bertazzon S et al (2016) A preliminary spatial assessment of risk: Marine birds and chronic oil pollution on Canada’s Pacific coast. Sci Total Environ 573:799–809. https://doi.org/10.1016/j.scitotenv.2016.08.145
Goebel ME, Perryman WL, Hinke JT et al (2015) A small unmanned aerial system for estimating abundance and size of Antarctic predators. Polar Biol 38:619–630. https://doi.org/10.1007/s00300-014-1625-4
Groom G, Petersen IK, Anderson MD, Fox AD (2011) Using object-based analysis of image data to count birds: mapping of lesser flamingos at Kamfers Dam, Northern Cape, South Africa. Int J Remote Sens 32:4611–4639. https://doi.org/10.1080/01431161.2010.489068
Haney JC, Jodice PGR, Montevecchi WA, Evers DC (2017) Challenges to oil spill Assessment for Seabirds in the Deep Ocean. Arch Environ Contam Toxicol 73:33–39. https://doi.org/10.1007/s00244-016-0355-8
Hodgson A, Kelly N, Peel D (2013) Unmanned Aerial Vehicles (UAVs) for surveying Marine Fauna: a Dugong Case Study. PLoS ONE 8:e79556. https://doi.org/10.1371/journal.pone.0079556
INMET - Instituto Nacional de Meteorologia (2017). http://www.inmet.gov.br/portal/index.php?r=estacoes/estacoesAutomaticas. Accessed 22 Mar 2020
Jones GP, Pearlstine LG, Percival HF (2006) An assessment of small unmanned aerial vehicles for wildlife research. Wildl Soc Bull (1973–2006) 34:750–758
Kelaher BP, Colefax AP, Tagliafico A et al (2019) Assessing variation in assemblages of large marine fauna off ocean beaches using drones. Mar Freshw Res. https://doi.org/10.1071/MF18375
Koh LP, Wich SA (2012) Dawn of drone ecology: low-cost autonomous aerial vehicles for conservation. Trop Conserv Sci 5:121–132. https://doi.org/10.1177/194008291200500202
Kudo H, Koshino Y, Eto A et al (2012) Cost-effective accurate estimates of adult chum salmon, Oncorhynchus keta, abundance in a japanese river using a radio-controlled helicopter. Fish Res 119–120:94–98. https://doi.org/10.1016/j.fishres.2011.12.010
Meager JJ, Sumpton WD (2016) Bycatch and strandings programs as ecological indicators for data-limited cetaceans. Ecol Ind 60:987–995. https://doi.org/10.1016/j.ecolind.2015.08.052
Moreland EE, Cameron MF, Angliss RP, Boveng PL (2015) Evaluation of a ship-based unoccupied aircraft system (UAS) for surveys of spotted and ribbon seals in the Bering Sea pack ice. J Unmanned Veh Sys 3:114–122. https://doi.org/10.1139/juvs-2015-0012
Pomeroy P, O’Connor L, Davies P (2015) Assessing use of and reaction to unmanned aerial systems in gray and harbor seals during breeding and molt in the UK. J Unmanned Veh Sys 3:102–113. https://doi.org/10.1139/juvs-2015-0013
Pontalti M, Danielski M (2011) Registros de enredamentos de baleias-franca, Eubalaena australis (CETACEA, MISTICETI), na temporada reprodutiva de 2010, em Santa Catarina. Brasil Biotemas 24:109–112. https://doi.org/10.5007/2175-7925.2011v24n2p109
Projeto de Monitoramento de Praias (PMP) (2019) In: Comunicação Bacia de Santos. https://www.comunicabaciadesantos.com.br/programa-ambiental/projeto-de-monitoramento-de-praias-pmp.html. Accessed 1 Mar 2020
Rees A, Avens L, Ballorain K et al (2018) The potential of unmanned aerial systems for sea turtle research and conservation: a review and future directions. Endang Species Res 35:81–100. https://doi.org/10.3354/esr00877
Rümmler M-C, Mustafa O, Maercker J et al (2018) Sensitivity of Adélie and Gentoo penguins to various flight activities of a micro UAV. Polar Biol 41:2481–2493. https://doi.org/10.1007/s00300-018-2385-3
Schofield G, Esteban N, Katselidis KA, Hays GC (2019) Drones for research on sea turtles and other marine vertebrates – A review. Biol Conserv 238:108214. https://doi.org/10.1016/j.biocon.2019.108214
SIMBA - Sistema de Informação de Monitoramento da Biota Aquática (n.d.) https://segurogis.petrobras.com.br/simba/web/. Accessed 1 Mar 2020
Smith C, Rowles T, Hart L et al (2017) Slow recovery of Barataria Bay dolphin health following the deepwater horizon oil spill (2013–2014), with evidence of persistent lung disease and impaired stress response. Endang Species Res 33:127–142. https://doi.org/10.3354/esr00778
Sweeney KL, Helker VT, Perryman WL et al (2015) Flying beneath the clouds at the edge of the world: using a hexacopter to supplement abundance surveys of Steller sea lions (Eumetopias jubatus) in Alaska. J Unmanned Veh Sys 4:70–81. https://doi.org/10.1139/juvs-2015-0010
Vas E, Lescroël A, Duriez O et al (2015) Approaching birds with drones: first experiments and ethical guidelines. Biol Lett 11:20140754. https://doi.org/10.1098/rsbl.2014.0754
Vermeulen C, Lejeune P, Lisein J et al (2013) Unmanned aerial survey of elephants. PLoS ONE 8:e54700. https://doi.org/10.1371/journal.pone.0054700
Vieira H, Calliari LJ, Oliveira GP de (2010). O estudo do impacto da circulação de veículos em praias arenosas através de parâmetros físicos: um estudo de caso. Engevista 6. https://doi.org/10.22409/engevista.v6i3.144
Watts AC, Ambrosia VG, Hinkley EA (2012) Unmanned aircraft systems in remote sensing and scientific research: classification and considerations of use. Remote Sens 4:1671–1692. https://doi.org/10.3390/rs4061671
Weimerskirch H, Prudor A, Schull Q (2018) Flights of drones over sub-antarctic seabirds show species- and status-specific behavioural and physiological responses. Polar Biol 41:259–266. https://doi.org/10.1007/s00300-017-2187-z
Weissensteiner MH, Poelstra JW, Wolf JBW (2015) Low-budget ready-to-fly unmanned aerial vehicles: an effective tool for evaluating the nesting status of canopy-breeding bird species. J Avian Biol 46(4):425–430. https://doi.org/10.1111/jav.00619
Williams R, Gero S, Bejder L et al (2011) Underestimating the damage: interpreting cetacean carcass recoveries in the context of the Deepwater Horizon/BP incident. Conserv Lett 4:228–233. https://doi.org/10.1111/j.1755-263X.2011.00168.x
Wright LD, Short AD (1984) Morphodynamic variability of surf zones and beaches: a synthesis. Mar Geol 56:93–118. https://doi.org/10.1016/0025-3227(84)90008-2
Womble JN, Ver Hoef JM, Gende SM, Mathews EA (2020) Calibrating and adjusting counts of harbor seals in a tidewater glacier fjord to estimate abundance and trends 1992 to 2017. Ecosphere 11. https://doi.org/10.1002/ecs2.3111
Zappes CA, Alves LCP, de Silva S, da CV et al (2013) Accidents between artisanal fisheries and cetaceans on the brazilian coast and Central Amazon: proposals for integrated management. Ocean Coast Manag 85:46–57. https://doi.org/10.1016/j.ocecoaman.2013.09.004
Acknowledgements
Authors are grateful to the Coordenação de Aperfeiçoamento de Pessoal Superior (CAPES) through program number 41005015004P7 (Mônica Pontalti). We give special thanks to Msc. Ticiana Fettermann (UAT University), to comments that greatly improved this study. Animals were collected under permit ABIO n. 640/2015.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Pontalti, M., Barreto, A.S. Use of Unnamed Aerial Vehicles (UAVs) to monitor marine megafauna strandings in beach monitoring programs. J Coast Conserv 26, 80 (2022). https://doi.org/10.1007/s11852-022-00924-w
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11852-022-00924-w