
Abstract
We discuss some results related to a phase transition model in which the potential energy induced by a double-well function is balanced by a fractional elastic energy. In particular, we present asymptotic results (such as \(\Gamma \)-convergence, energy bounds and density estimates for level sets), flatness and rigidity results, and the construction of planelike minimizers in periodic media. Finally, we consider a nonlocal equation with a multiwell potential, motivated by models arising in crystal dislocations, and we construct orbits exhibiting symbolic dynamics, inspired by some classical results by Paul Rabinowitz.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The goal of this paper is to collect into a homogeneous and original presentation a series of results about the fractional Allen–Cahn (or scalar Ginzburg–Landau) equation.
The classical model for this equation arises in the study of phase coexistence and it has several applications in material sciences. In its basic version, the model aims to describe the phase separation occurring in some media. The two phases can be described by a state parameter function \(u:\mathbb {R}^n \rightarrow [-1,1]\). In this setting, \(n\in \mathbb {N}\) is the dimension of the ambient space and the values \(-1\) and 1 for u represent the “pure phases” of the system.
The total energy of the system is supposed to be made of two terms: a “potential” term \({\mathcal {W}}(u)\), which forces minimizers to stay “as close as possible to the pure phases”, and an “elastic” (or, with a slight abuse of a terminology borrowed from similar setting in Hamiltonian dynamics, “kinetic”) term \({\mathcal {K}}(u)\), which “prevents the formation of unnecessary interfaces”.
More precisely, given a (bounded, smooth) set \(\Omega \subset \mathbb {R}^n\) (the “container”), and a smooth function \(W:\mathbb {R}\rightarrow [0,+\infty ]\) (the “potential”) which has nondegenerate minima at \(\pm 1\) (i.e., say, \(W(\pm 1)=0<W(r)\) for any \(r\in \mathbb {R}{\setminus }(-1,1)\), with \(W''(\pm 1)>0\)), we set
In the classical case, the formation of interfaces is penalized by a local elastic term of the form
which leads to the total energy functional
whose critical points are solutions of the partial differential equation
Recently, some attention has been devoted to nonlocal phase transition models to capture the long term interactions between particles and to describe the boundary effects, see e.g., [2, 21, 35]. Here, we consider a phase transition model driven by a nonlocal energy of fractional type which can be described as follows. Particles are supposed to interact according to a kernel, which we take invariant under translations and rotations, scale invariant and with polynomial decay. More concretely, we set
with \(s\in (0,1)\) and consider, as elastic energy, the quantity
where
Here above, \(\Omega ^c:=\mathbb {R}^n{\setminus }\Omega \) denotes the complementary set.
By comparing (1.1) with (1.5), we see that we have replaced the classical seminorm in the Sobolev space \(H^1\) with a seminorm in the fractional Sobolev space \(H^s\), with \(s\in (0,1)\). As for the domain of integration, the idea, both in (1.1) and in (1.5), is that the values of the state parameter u are fixed outside the container \(\Omega \), so they should not really contribute to an effective energy and the energy should only take into account contributions which “see the container \(\Omega \)”. In this sense, the integral in (1.1) takes into account the whole of the space \(\mathbb {R}^n\), with the exception of the contributions that lie outside the container \(\Omega \) (that is, the integral in (1.1) ranges in \(\mathbb {R}^n {\setminus }(\Omega ^c)= \Omega \)). In the same spirit, the energy in (1.5), which is a double integral, takes into account all the interactions in the whole of the space \(\mathbb {R}^n\times \mathbb {R}^n\), with the exception of the ones which only involve points outside the container \(\Omega \) (that is, the integral in (1.5) ranges in \((\mathbb {R}^n\times \mathbb {R}^n) {\setminus }(\Omega ^c\times \Omega ^c)\), which indeed coincides with \(Q_\Omega \)).
With these observations, when the elastic energy in (1.1) is replaced by the nonlocal one in (1.5), the total energy in (1.2) is replaced by its fractional analogue
whose critical points are solutions of the partial differential equation
which can be seen as a nonlocal counterpart of (1.3). Here, as customary in the literature involving fractional operators, we are using the notation \((-\Delta )^s\) to denote the fractional Laplacian, i.e., the integro-differential operator given (up to multiplicative dimensional constants that we neglect here) by
We refer to [17, 23, 31, 32] for an introduction to the fractional Laplacian.
Here, we aim to discuss the theory of nonlocal phase transitions, as described by the energy functional in (1.6) and by the pseudodifferential equation in (1.7), basically discussing the similarities and the important differences with respect to the classical theory, especially in the light of \(\Gamma \)-convergence, density estimates, rigidity and flatness results and periodic and quasiperiodic structures arising in periodic media.
2 \(\Gamma \)-convergence and density estimates
To study the asymptotics of the solutions of (1.7), it is convenient to look at the spacial scaling \(x\rightarrow \frac{x}{\varepsilon }\). Correspondingly, one can appropriately rescale the energy functional as
When we want to emphasize the dependence of the energy functional (or of the energy contributions) on the container \(\Omega \), we will write, respectively, \({\mathcal {W}}(u;\Omega )\), \({\mathcal {K}}(u;\Omega )\), \({\mathcal {E}}(u;\Omega )\) and \({\mathcal {E}}_\varepsilon (u;\Omega )\).
In this notation, if \(u_\varepsilon (x):=u(x/\varepsilon )\) and \(\Omega _\varepsilon := \varepsilon \Omega \), we have that
and so
if \(s\in (0,1){\setminus }\{1/2\}\), and
if \(s=1/2\) (this additional logarithmic factor is indeed very typical for fractional problems related to the square root of the Laplacian).
The scale of this functional is chosen in such a way that the following \(\Gamma \)-convergence result holds (see [34]):
Theorem 2.1
As \(\varepsilon \searrow 0\), the functional \({\mathcal {E}}_\varepsilon \) \(\Gamma \)-converges to
It is worth to point out that Theorem 2.1 may be rephrased by saying that when \(s\in [1/2,\,1)\), the fractional phase transition energy \(\Gamma \)-converges to the classical perimeter functional—as it happens indeed in the classical case \(s=1\). The classical counterpart when \(s=1\) of Theorem 2.1 was indeed one of the founding results of \(\Gamma \)-convergence, see [25].
On the other hand, when \(s\in (0,\,1/2)\), the fractional phase transition energy converges to the fractional perimeter functional that was introduced in [11]. This suggests that the fractional parameter \(s=1/2\) provides a threshold for the asymptotic behavior of nonlocal phase transitions: above such threshold, the behavior of the interfaces at a large scale somehow “localizes”, since such behavior is dictated by the classical, and thus local, perimeter minimization; but below such threshold the behavior of the interfaces at a large scale fully maintains its nonlocal properties, since it is driven by a nonlocal perimeter functional.
Of course, \(\Gamma \)-convergence is a very elegant and effective method to deal with the asymptotics of functionals and it fits well with the calculus of variations and with the problems of minimization. On the other hand, it gives little information on the geometric properties of the solutions of the equation. In the classical case to overcome this difficulty, a theory of “density estimates” has been developed in [7]. Namely, the goal of this theory is to establish energy bounds and bounds in measure theoretic sense for the level sets of minimizers, with the goal of showing that minimizers behave “like one-dimensional solutions” at least in terms of energy and in terms of measure occupied by their interface.
In the fractional framework, we have that the energy of minimizers of \({\mathcal {E}}_\varepsilon \) is locally uniformly bounded, according to the following result:
Theorem 2.2
Let \(\vartheta _1\in (0,1)\). If \(u_\varepsilon \) minimizes \({\mathcal {E}}_\varepsilon \) in \(B_{1+\varepsilon }\) and \(|u_\varepsilon (0)|<\vartheta _1\), then
with \(C>c>0\) only depending on n, s and W.
The upper energy bound in (2.1) was proved in [37] and the lower bound in [15].
A counterpart of the energy bounds in Theorem 2.2 is a density estimate, which says, roughly speaking, that the measure of the interface of minimizers of \({\mathcal {E}}_\varepsilon \) is locally of size comparable to \(\varepsilon \). The precise result goes as follows:
Theorem 2.3
Let \(\vartheta _1\), \(\vartheta _2\in (0,1)\). If \(u_\varepsilon \) minimizes \({\mathcal {E}}_\varepsilon \) in \(B_{1}\) and \(|u_\varepsilon (0)|<\vartheta _1\), then
with \(C>c>0\) only depending on n, s and W.
The upper density estimate in (2.2) was proved in [37] and the lower bound in [15]. We remark that the connection between the energy bound in (2.1) and the measure theoretic bound in (2.2) is particularly close in the local case (i.e., for \(s=1\)) and also in the weakly nonlocal case (i.e., when \(s\in (1/2,\,1)\)), since, roughly speaking, the potential energy is capable of measuring the size of the interface in a sufficiently sharp way. On the other hand, in the strongly nonlocal case (i.e., when \(s\in (0,\,1/2)\)), the potential energy does not suffice for this scope and one has to carefully take into account the interaction in the elastic energy, possibly at any scale, to detect the dominant contributions. In particular, the case \(s=1/2\) for these estimates turns out to be the most delicate one, since the precise bounds involve a logarithmic correction.
We stress that the optimal bounds obtained in (2.1) and (2.2) not only provide the uniform convergence of the level sets of the minimizers to their limit interface (see [7]), but also provide the cornerstone for the construction of planelike solutions in periodic media for which the oscillation from the reference plane is of the same order of the size of periodicity of the media (this feature will be more thoroughly detailed in Sect. 4). For this, we also remark that both Theorems 2.2 and 2.3 hold for more general kernels K and potentials W (see [15]).
3 Rigidity and flatness results
A byproduct of the optimal bounds in (2.1) and (2.2) is that minimizers behave as if they were one-dimensional functions (that is, for functions of only one Euclidean variable, with sufficient decay at infinity, one can check “by hands” that formulas (2.1) and (2.2) hold true).
A natural question in this setting is whether global one-dimensional solutions of (1.7) indeed exist. That is, up to normalization, if there exists a function \(u_0:\mathbb {R}\rightarrow (-1,1)\) that satisfies
We stress that when \(s=1\), the existence of such “transition layer” \(u_0\) is obvious, since the problem boils down to an ordinary differential equation, which can be integrated explicitly (by multiplying the equation by \(u_0'(x)\) and taking the antiderivative—or equivalently using the Law of Conservation of Energy).
On the other hand, differently from the classical case, when \(s\in (0,1)\) the existence of such solution \(u_0\) is a rather delicate business, and it has been established, using variational and energy methods, in [12, 28] and in further generality, in [10].
Of course, given the estimates in (2.1) and (2.2), one may wonder under which additional conditions (if any) we can say that solutions of (1.7) are indeed one-dimensional, i.e., up to normalizations, are of the form \(u(x)=u_0(x_n)\), or say, the level sets of u are hyperplanes. In the classical case \(s=1\) this was in fact the content of a beautiful conjecture by Ennio De Giorgi in [16], which can be stated as follows:
Conjecture 3.1
Let \(u\in C^2(\mathbb {R}^n,[1,1])\) satisfy
and
in the whole of \(\mathbb {R}^n\). Is it true that all the level sets of u are hyperplanes, at least if \(n\leqslant 8\)?
We refer to [20] for a detailed account of the available results related to Conjecture 3.1; here, we would like to discuss the fractional analogue of Conjecture 3.1 when Eq. (3.2) is replaced by its nonlocal counterpart
with \(s\in (0,1)\). In this case, a positive answer to this problem was given in [13] when \(n=2\) and \(s=1/2\), in [12, 33] when \(n=2\) and \(s\in (0,1)\), in [5] when \(n=3\) and \(s=1/2\) and in [6] when \(n=3\) and \(s\in (1/2,\,1)\) (see also [36] and [4] for different proofs, also related to nonlocal minimal surfaces).
Hence, all in all, at the moment, to the best of our knowledge, the state of the art on the nonlocal analogue of Conjecture 3.1 can be summarized by the following result:
Theorem 3.2
Let \(u\in C^2(\mathbb {R}^n,[1,1])\) satisfy
in the whole of \(\mathbb {R}^n\). Assume also that
Then all the level sets of u are hyperplanes.
As a matter of fact, Theorem 3.2 holds true for a very general class of equations under condition (3.3), see [4–6, 12, 13, 33, 36]. Of course, it would be very desirable to go beyond condition (3.3), or to provide counterexamples.
It is also suggestive to compare the threshold \(s=1/2\) in (3.3) with the different behavior of the \(\Gamma \)-limit described by Theorem 2.1. In any case, it is not clear whether or not condition (3.3) reflects somehow the different behavior of local and nonlocal minimal surfaces. See also [4] for further discussions on this point.
4 Planelike minimizers in periodic media
A classical topic in differential geometry (resp., dynamical systems) is to look for periodic and quasiperiodic solutions of problems set in periodic media which lie at a bounded distance from any fixed hyperplane (resp. which possess a rotation number in average). For instance, in [22, 26] the case of the plane with a Riemannian metric was taken into account, establishing the existence of minimal geodesics which stay at a bounded distance from any prescribed straight line (depending on the arithmetic properties of the slope of this line, the geodesics turn out to be either periodic or quasiperiodic).
A similar problem in higher codimension turns out to be, in general, ill-posed, since [22] provided an example of a metric in \(\mathbb {R}^3\) which does not have geodesics at bounded distance from a particular direction. Nevertheless, a similar problem can be efficiently set in higher dimension, provided that one takes into consideration objects of codimension 1, such as minimal hypersurfaces (namely, hypersurfaces which minimize a periodic perimeter functional) that lie at bounded distance from any fixed hyperplane. We refer to [1, 3, 8] and references therein for these types of problems, and for instance, to [24] for related problems in the setting of dynamical systems.
The construction of periodic and quasiperiodic objects in periodic media has also a long and important tradition in partial differential equations, see [27, 30] and the references therein. For instance, in [38] the classical Ginzburg–Landau–Allen–Cahn equation (3.2) is set in a periodic medium, and one constructs global solutions which are minimal, and either periodic or quasiperiodic, and whose level sets stay at a bounded distance from a prescribed hyperplane. Roughly speaking, from a physical point of view, one obtains in this way some phase coexistence in an infinite periodic medium whose interface is a flat hyperplane, up to a uniformly bounded error.
The goal of this section is to describe in detail some of the results concerning periodic and quasiperiodic minimizers for the nonlocal phase transition equation in a periodic medium. For this, we take into consideration the following heterogeneous variant of the total energy (1.6):
with K as in (1.4), and the corresponding Euler–Lagrange equation
To model a nonhomogeneous periodic environment, the potential W appears now modulated by a measurable function \(Q: \mathbb {R}^n \rightarrow [Q_*, Q^*]\), with \(Q^* \geqslant Q_* > 0\), which is periodic with respect to a discrete lattice of step \(\tau \geqslant 1\), that is
As we just said, the energy \(\mathcal {E}\) embodies the presence of an underlying heterogeneous medium by means of the multiplicative correction Q in the potential term. Note that the model is sensitive to the periodicity scale of the medium through the factor \(\tau \).
Of course, a broader setting can be taken into account, for instance, by considering a more general periodic potential or by letting the kernel K be space-dependent as well. This latter generalization is particularly interesting as it encompasses models in which the interaction between two particles of the system does not depend only on their distance, but may vary (albeit in a periodic way) as the particles occupy different places in the space.
Here, we choose to favor a not too involved exposition, and thus to stick to the simpler model provided by (4.1). For a presentation of our contributions in a wider generality, we refer the interested reader to [14, 15].
The result that we shortly discuss addresses the existence of a planelike minimizer for \(\mathcal {E}\) in the whole space \(\mathbb {R}^n\). That is, a function \(u: \mathbb {R}^n \rightarrow [-1, 1]\) that minimizes \(\mathcal {E}\) in \(\Omega \) for any bounded set \(\Omega \subset \mathbb {R}^n\) (the so-called class A minimizer) and whose intermediate level set \(\{ |u| < 9 / 10 \}\) lies at a bounded distance from any fixed hyperplane of \(\mathbb {R}^n\). By construction, the minimizer enjoys a suitable periodicity or quasi-periodicity property, depending on whether the slope of the associated hyperplane is rational or not.
When Q is constant, the energy is translation-invariant, and as a result, planar minimizers exist (recall the discussion at the beginning of Sect. 3). Under the presence of a nontrivial modulation Q, such construction cannot be carried out, and in general, one-dimensional minimizers do not exist. However, the following fact holds true.
Theorem 4.1
There exists a universal constant \(M_0 > 0\), such that given any \(\omega \in \mathbb {R}^n {\setminus } \{ 0 \}\), we can construct a class A minimizer u for \(\mathcal {E}\) satisfying
Furthermore, u enjoys the following quasi-periodicity properties:
-
if \(\omega \in \tau \mathbb {Q}^n {\setminus } \{ 0 \}\), then u is \(\sim \)-periodic, i.e., it respects the equivalence relation \(\sim \) defined in \(\mathbb {R}^n\) by
$$\begin{aligned} x \sim y \qquad \text{ if } \text{ and } \text{ only } \text{ if } \qquad y - x \in \tau \mathbb {Z}^n \text{ and } \omega \cdot (y - x) = 0; \end{aligned}$$(4.2) -
if \(\omega \in \mathbb {R}^n {\setminus } \tau \mathbb {Q}^n\), then u is the locally uniform limit of a sequence of periodic class A minimizers.
Theorem 4.1 provides the aforementioned existence of planelike minimizers for the nonlocal energy (4.1), see Fig. 1.

A planelike minimizer as given in Theorem 4.1
We stress that the size of the strip where the (essential) transition of a minimizer occurs is proportional to the periodicity scale \(\tau \) of the medium. The proportionality constant \(M_0\) is universal, in the sense that it depends only on the structural constants involved in the model, i.e., n, s, \(Q_*\) and \(Q^*\).
Besides being interesting in itself, this fact plays a crucial role in deducing from Theorem 4.1 a similar construction of planelike minimal surfaces for a periodic nonlocal perimeter (see [15] for more details).
Also, the value 9 / 10, that has been used to identify an interface region for the minimizer, obviously plays no particular role and may be indeed replaced by any \(\vartheta \in (0, 1)\). However, the constant \(M_0\) would then depend on \(\vartheta \) as well.
The rest of this section contains a sketch of the proof of Theorem 4.1. The general strategy adopted is shaped on the one designed in [8] for a model described by a periodic surface energy, and developed in [38], where the argument is used to deal with a local, nonhomogeneous Allen–Cahn–Ginzburg–Landau functional similar to (1.2).
We begin by addressing the case of a direction \(\omega \in \tau \mathbb {Q}^n {\setminus } \{ 0 \}\). We denote by \(\widetilde{\mathbb {R}}^n\) any fundamental domain of the quotient space \(\mathbb {R}^n / \sim \), where the relation \(\sim \) is given in (4.2), and consider the class of admissible functions
for any large \(M > 0\). A straightforward application of the direct method of the calculus of variations gives the existence of global minimizers of the auxiliary functional
within the set \({\mathcal {A}}_\omega ^M\), at leastFootnote 1 if \(s \in (1/2, 1)\). So we denote by \({\mathcal {M}}_\omega ^M\) the set of such minimizers.
Observe that \(\mathcal {F}\) differs from the energy \({\mathcal {E}}(\cdot , \widetilde{\mathbb {R}}^n)\), given in (4.1), for the sole fact that the latter contains the term integrated over \(\widetilde{\mathbb {R}}^n \times {( \widetilde{\mathbb {R}}^n )}^c\) counted twice, namely
The necessity of considering the auxiliary functional \(\mathcal {F}\) is peculiar to the nonlocal setting considered here and is mostly due to the fact that the functional \(\mathcal {E}\) does not behave well with respect to the periodic structure induced by \(\sim \).
In more concrete terms, given a function u, one can consider its \(\sim \)-periodic extension \(\widetilde{u}\), defined for a.e. \(x \in \mathbb {R}^n\) as
Then, it holds in general that
However, from (4.3), noticing that the potential term has a local character, we obtain that
In particular, if u is \(\sim \)-periodic (hence \(u=\widetilde{u}\)),
In addition, we have that
This fact, which is of key importance and ultimately motivates the introduction of the functional \(\mathcal {F}\), is based on the following computation: let \(\phi \) be a smooth function supported inside \({\widetilde{\mathcal {S}}}_\omega ^M\) and let \(v:=u+\phi \), with \(u\in {\mathcal {A}}_\omega ^M\). Then, \(\phi \) vanishes outside \({\widetilde{\mathbb {R}}^n} \) and \(\widetilde{v}=\widetilde{u}+\widetilde{\phi }=u+\widetilde{\phi }\). Consequently, if \(x\in ({\widetilde{\mathbb {R}}^n })^c\) and \(y\in {\widetilde{\mathbb {R}}^n }\), we have that
Hence, recalling (4.5) and (4.6),
Also, using the \(\sim \)-periodicity and changing variables \(x\longmapsto x-k\), \(y\longmapsto y+k\),
So we insert this information into (4.8), exchanging the roles of x and y, thanks to the even symmetry of K, and we find that one term simplifies, yielding to the identity
Now, we take a competitor w for u and we define \(\phi _1:= (w-u)_+\geqslant 0\) (resp. \(\phi _2:= (w-u)_-\geqslant 0\)) and \(v_1:=u-\phi _1\) (resp. \(v_2:=u-\phi _2\)). In this way, we deduce from (4.9) that
for \(i\in \{1,2\}\).
Notice also that \(\max \{ u, w\} = v_1\) and \(\min \{ u, w\} = v_2\). Therefore, after a simple computation we get that
This and (4.10) give that
Now, if u is a minimizer of \(\mathcal {F}\) in the class \({\mathcal {A}}_\omega ^M\), we have that \({\mathcal {F}}(u)\leqslant {\mathcal {F}}(\widetilde{v_i})\), for \(i\in \{1,2\}\), and this information combined with (4.11), gives that \({\mathcal {E}}(w;\widetilde{\mathbb {R}}^n)\geqslant {\mathcal {E}}(u;\widetilde{\mathbb {R}}^n)\). This establishes (4.7).
Now, while the functions in \({\mathcal {M}}_\omega ^M\) are indeed minimizers of \(\mathcal {E}\) inside \({\widetilde{\mathcal {S}}}_\omega ^M\) thanks to (4.7), there is still no evidence of why they should extend their minimizing properties beyond such domain, and in fact in general they do not. In addition, the set of minimizers \({\mathcal {M}}_\omega ^M\) is typically made up of more than just one element. This lack of uniqueness may lead to a corresponding lack of symmetry and rigidity in the elements of \({\mathcal {M}}_\omega ^M\), and prevent them from being class A minimizers.
For these reasons, we direct our attention to a specific element of the set \({\mathcal {M}}_\omega ^M\), namely the minimal minimizer.
The minimal minimizer \(u_\omega ^M\) of the class \({\mathcal {M}}_\omega ^M\) is defined as
It is not hard to prove that \(u_\omega ^M\) is unique and belongs to \({\mathcal {M}}_\omega ^M\). Therefore, by considering \(u_\omega ^M\) we select the element of \({\mathcal {A}}_\omega ^M\) with the lowest energy \(\mathcal {F}\), and at the same time, having an interface with the tightest possible oscillation. As a matter of fact, this double optimality translates into the following two nice features that are enjoyed by the minimal minimizer:
-
(i)
the doubling or no-symmetry-breaking property, i.e., \(u_\omega ^M\) is a minimizer also within functions which exhibit a periodicity of multiple period;
-
(ii)
the Birkhoff property, i.e., the level sets of \(u_\omega ^M\) and its translations along vectors \(k \in \tau \mathbb {Z}^n\) are well-ordered and have no nontrivial intersections.
The consequences entailed by these facts are twofold. On the one hand, the doubling property implies that \(u_\omega ^M\) is a minimizer for \(\mathcal {E}\) with respect to all compact perturbations occurring inside the strip \({\mathcal {S}}_\omega ^M\). On the other hand, the Birkhoff property extends such minimizing character to the whole space \(\mathbb {R}^n\), if the width M of the strip is sufficiently large.
More precisely, by combining the energy and density estimates of Theorems 2.2 and 2.3, we obtain the existence of a “clean” ball B inside \({\mathcal {S}}_\omega ^M\) over which \(u_\omega ^M\) is, say, smaller than \(- 9/10\). The scale invariance of such estimates ensures that the radius of this ball is a universal fraction of M. Then, the Birkhoff property allows us to translate B around \({\mathcal {S}}_\omega ^M\) (in a discrete way) and clean out a full substrip of width comparable to \(\tau \), provided that \(M \geqslant M_0 \tau \), for some large universal constant \(M_0 > 0\). This says that the minimal minimizer \(u_\omega ^M\) starts attaining values below \(- 9/10\) well before meeting the upper constraint \(\{ \omega \cdot x = M |\omega | \}\). Such unconstrainedness is the key observation that leads to deducing that \(u_\omega ^M\) is a class A minimizer for \(\mathcal {E}\), which thereafter follows almost immediately.
The proof of Theorem 4.1 is essentially complete for the case of a direction \(\omega \in \tau \mathbb {Q}^n {\setminus } \{ 0 \}\). When instead \(\omega \in \mathbb {R}^n {\setminus } \mathbb {Q}^n\), we consider a sequence \(\{ u_k \}\) of periodic planelike minimizers, corresponding to rational approximating directions \(\{ \omega _k \} \subset \tau \mathbb {Q}^n {\setminus } \{ 0 \}\) of \(\omega \). Uniform Hölder estimates combined with the fact that the value \(M_0\) does not depend on the chosen direction then allow us to take the limit in k and obtain a planelike class A minimizer with interface confined in a strip orthogonal to \(\omega \).
In conclusion, with Theorem 4.1 we are able to prove the existence of planelike minimizers for the energy \(\mathcal {E}\), even if its nonlocal nature prevents it from matching the underlying periodic medium [recall (4.4)] as well as in the classical, local case treated in [38].
On top of that, the techniques described in this section are flexible enough to be adapted to other nonlocal periodic models, which arise, for instance, in connection with fractional perimeter functionals and long-range Ising models (see [9, 15]).
5 Multiwell potentials and chaotic orbits
Among the many others, one of the main achievements of Paul Rabinowitz consists in providing a clear and elegant framework in which the chaotic behavior of many equations of great physical importance can be rigorously detected and deeply understood. We would like to point out one application of the theory that he developed in the framework of Hamiltonian dynamics to nonlocal equations. For this, we consider an equation of the type
Here, V is a smooth multiwell potential with a discrete set of nondegenerate minima and a is a smooth function (indeed, a more general setting, also comprising systems of equations, may be taken into account). The reader may compare Eqs. (1.7) and (5.1): in some sense, Eq. (5.1) is taking into account the possibility of drifting from one minimum of V to another one (as well as the layer solution \(u_0\) in (3.1) connects the minima of the two-well potential W). In this sense, the modulation function a provides the possibility of favoring this kind of multiple jumps.
Equation (5.1) also arises naturally in the study of crystal dislocation dynamics; in this framework, the function u can be interpreted as the discrepancy between the rest position of an atom and its actual position, see e.g., Section 2 of [18] for simple physical motivations.
The result that we present here has been obtained in [19] and can be interpreted as a fractional counterpart of the classical results in [29].
Roughly speaking, these results aim to provide a symbolic dynamics for the solutions of Eq. (5.1) (under suitable “nondegeneracy assumptions” on a). That is, one considers the discrete space consisting of the equilibria of V and finds a solution of (5.1) which induces a shift operator on such space. Namely, given a sequence of minima of V in a prescribed order, one finds a solution of (5.1) which gets close to each of these minima of V, in the required order.
More precisely, we have the following result:
Theorem 5.1
Assume that \(V\in C^2(\mathbb {R},[0,+\infty ))\) is even, with \(V(r+k)=V(r)\), for any \(r\in \mathbb {R}\) and \(k\in \mathbb {Z}\). Assume also that \(V(k)=0\) for any \(k\in \mathbb {Z}\), that \(V(r)>0\) and \(V''(0)>0\).
Let \(a(x):=a_1+a_2\cos (\varepsilon x)\), with \(a_1>a_2>0\) and \(\varepsilon >0\) small enough.
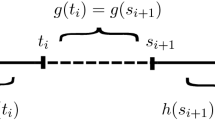
Let \(\zeta _1,\ldots ,\zeta _N\in \mathbb {Z}\). Then, there exist \(b_1<\cdots <b_{2N-2} \in \mathbb {R}\) and a solution u of (5.1) such that
The situation stated in Theorem 5.1 is described in Fig. 2.

The multibump solution constructed in Theorem 5.1
Here is a sketch on how Theorem 5.1 can be deduced from the results in [19]. First of all, we may suppose that
Indeed, this may be obtained just by adding the intermediate integers in the original sequence \(\zeta _1,\ldots ,\zeta _N\).
Now we claim that
for any \(i\in \{1,\ldots ,N-1\}\), where the admissible class \({\mathcal {A}}(\zeta _i)\) is defined in Section 8 of [19] (roughly speaking, \({\mathcal {A}}(\zeta _i)\) contains all the integers \(\zeta \) which can be connected to \(\zeta _i\) by a constrained orbit from a neighborhood of \(\zeta _i\) to a neighborhood of \(\zeta \) with minimal possible action).
To prove (5.3), we suppose that \(\zeta _{i+1}=\zeta _i+1\) (recall (5.2); the case \(\zeta _{i+1}=\zeta _i-1\) is analogous). Let \(\zeta \in {\mathcal {A}}(\zeta _i)\). Since, by Lemma 8.1 in [19], we have that \(2\zeta _i-\zeta \) also belongs to \({\mathcal {A}}(\zeta _i)\), by possibly replacing \(\zeta \) with \(2\zeta _i-\zeta \) we may and do suppose that \(\zeta >\zeta _i\). That is, \(\zeta \geqslant \zeta _i+1\). Now, if \(\zeta =\zeta _i+1\), we have that
and so (5.3) is proved.
Hence, we may focus on the case in which \(\zeta \geqslant \zeta _i+2\). In this case, given \(r\in (0,\,1/4]\), if we have an orbit \(u_i\) such that \(|u_i(x)-\zeta _i|\leqslant r\) for any \(x\leqslant b_1\) and \(|u_i(x)-\zeta |\leqslant r\) for any \(x\geqslant b_2\), we can define
Then, if \(x\leqslant b_1\), we have that
hence \(u_i^*(x)=u_i(x)\in [\zeta _i-r,\,\zeta _i+r]\). In addition, if \(x\geqslant b_2\), then
thus \(u_i^*(x)=\zeta _i+1 \in [\zeta _{i+1}-r,\,\zeta _{i+1}+r]\). This gives that \(u^*_i\) is a constrained orbit from a neighborhood of \(\zeta _i\) to a neighborhood of \(\zeta _{i+1}\).
What is more, \(V(u^*_i(x))\leqslant V(u_i(x))\) for any \(x\in \mathbb {R}\); also, for any x, \(y\in \mathbb {R}\),
As a consequence, the action of \(u^*_i\) is less than or equal to the action of \(u_i\), hence \(\zeta _{i+1}\) is admissible, thus proving (5.3).
Now, from (5.3) and Theorem 9.3 in [19], we obtain Theorem 5.1 here.
We underline that an important difference between the result in Theorem 5.1 and the classical ones for Hamiltonian systems lies in the glueing methods. Indeed, in the classical case, the technique of cutting-and-pasting different trajectories is abundantly used (typically, to construct suitable competitors for lowering the action functional). In the nonlocal case, this method may lead to additional difficulties, since the action of the new orbit obtained by a cut-and-paste of two trajectories is not simply the sum of the two actions of the original trajectories, since nonlocal interactions take place in the elastic part of the functional, which may be in fact the dominant contribution when the fractional parameter s is small (think once more to the asymptotics in Theorem 2.1).
To overcome such a difficulty, in [19] we introduced a “clean interval” method. Namely, one has to perform the cut-and-paste techniques always at points in which the trajectories meet in a “very flat” way (that is the oscillations of the two trajectories need to be appropriately small in a sufficiently large interval). This fact, combined with suitable “elliptic estimates”, allows us to estimate the remainder terms and to efficiently adapt the dynamical systems methods also to nonlocal cases.
Notes
We stress that the case in which \(s \in (0, 1/2]\) can be treated afterwards via a limiting argument, approximating K with kernels truncated at infinity. The difficulties arise essentially for the fact that when \(s \in (0,1/2]\), the functional \(\mathcal {F}\) is identically equal to \(+\infty \) on \({\mathcal {A}}_\omega ^M\), due to the “fat” tails of the kernel.
References
Auer, F., Bangert, V.: Minimising currents and the stable norm in codimension one. C. R. Acad. Sci. Paris Sér. I Math. 333(12), 1095–1100 (2001)
Alberti, G., Bellettini, G.: A non-local anisotropic model for phase transitions: asymptotic behaviour of rescaled energies. Eur. J. Appl. Math. 9(3), 261–284 (1998)
Bangert, V.: Laminations of 3-tori by least area surfaces. Analysis. et cetera, pp. 85–114. Academic Press, Boston (1990)
Bucur, C., Valdinoci, E.: Nonlocal diffusion and applications. Lecture Notes of the Unione Matematica Italiana, vol. 20. Springer, Cham, Unione Matematica Italiana, Bologna (2016)
Cabré, X., Cinti, E.: Energy estimates and 1-D symmetry for nonlinear equations involving the half-Laplacian. Discrete Contin. Dyn. Syst. 28(3), 1179–1206 (2010)
Cabré, X., Cinti, E.: Sharp energy estimates for nonlinear fractional diffusion equations. Calc. Var. Partial Differ. Equ. 49(1–2), 233–269 (2014)
Caffarelli, L.A., Córdoba, A.: Uniform convergence of a singular perturbation problem. Commun. Pure Appl. Math. 48(1), 1–12 (1995)
Caffarelli, L.A., de la Llave, R.: Planelike minimizers in periodic media. Commun. Pure Appl. Math. 54(12), 1403–1441 (2001)
Cozzi, M., Dipierro, S., Valdinoci, E.: Planelike interfaces in long-range Ising models and connections with nonlocal minimal surfaces (2016). arXiv:1605.06187
Cozzi, M., Passalacqua, T.: One-dimensional solutions of non-local Allen-Cahn-type equations with rough kernels. J. Differ. Equ. 260(8), 6638–6696 (2016)
Caffarelli, L.A., Roquejoffre, J.-M., Savin, O.: Nonlocal minimal surfaces. Commun. Pure Appl. Math. 63(9), 1111–1144 (2010)
Cabré, X., Sire, Y.: Nonlinear equations for fractional Laplacians II: existence, uniqueness, and qualitative properties of solutions. Trans. Am. Math. Soc. 367(2), 911–941 (2015)
Cabré, X., Solà-Morales, J.: Layer solutions in a half-space for boundary reactions. Commun. Pure Appl. Math. 58(12), 1678–1732 (2005)
Cozzi, M., Valdinoci, E.: Plane-like minimizers for a non-local Ginzburg-Landau-type energy in a periodic medium (2015). arXiv:1505.02304
Cozzi, M., Valdinoci, E.: Planelike minimizers of nonlocal Ginzburg-Landau energies and fractional perimeters in periodic media (2016)
De Giorgi, E.: Convergence problems for functionals and operators. In: Proceedings of the International Meeting on Recent Methods in Nonlinear Analysis (Rome, 1978), Pitagora, Bologna, pp. 131–188 (1979)
Di Nezza, E., Palatucci, G., Valdinoci, E.: Hitchhiker’s, guide to the fractional Sobolev spaces. Bull. Sci. Math. 136(5), 521–573 (2012)
Dipierro, S., Palatucci, G., Valdinoci, E.: Dislocation dynamics in crystals: a macroscopic theory in a fractional Laplace setting. Commun. Math. Phys. 333(2), 1061–1105 (2015)
Dipierro, S., Patrizi, S., Valdinoci, E.: Chaotic orbits for systems of nonlocal equations. Commun. Math. Phys. doi:10.1007/s00220-016-2713-9
Farina, A., Valdinoci, E.: The state of the art for a conjecture of De Giorgi and related problems, Recent progress on reaction-diffusion systems and viscosity solutions, pp. 74–96. World Sci. Publ, Hackensack (2009)
del Mar González, : M.: Gamma, convergence of an energy functional related to the fractional Laplacian. Calc. Var. Partial Differ. Equ. 36(2), 173–210 (2009)
Hedlund, G.A.: Geodesics on a two-dimensional Riemannian manifold with periodic coefficients. Ann. Math. (2) 33(4), 719–739 (1932)
Landkof, N.S.: Foundations of modern potential theory. Translated from the Russian by A. P. Doohovskoy, Die Grundlehren der mathematischen Wissenschaften, Band 180. Springer-Verlag, New York–Heidelberg (1972)
Mather, J.N.: Variational construction of connecting orbits. Ann. Inst. Fourier (Grenoble) 43(5), 1349–1386 (1993)
Modica, L., Mortola, S.: Un esempio di \({\Gamma ^{-}}\)-convergenza. Boll. Un. Mat. Ital. B (5) 14(1), 285–299 (1977)
Morse, H.M.: A fundamental class of geodesics on any closed surface of genus greater than one. Trans. Am. Math. Soc. 26(1), 25–60 (1924)
Moser, J.: Minimal solutions of variational problems on a torus. Ann. Inst. H. Poincaré Anal. Non Linéaire 3(3), 229–272 (1986)
Palatucci, G., Savin, O., Valdinoci, E.: Local and global minimizers for a variational energy involving a fractional norm. Ann. Mat. Pura Appl. (4) 192(4), 673–718 (2013)
Rabinowitz, P.H., Coti Zelati, V.: Multichain-type solutions for Hamiltonian systems. In: Proceedings of the Conference on Nonlinear Differential Equations (Coral Gables, FL, 1999), Electron. J. Differ. Equ. Conf., vol. 5, pp. 223–235. Southwest Texas State Univ., San Marcos (2000, electronic)
Rabinowitz, P.H., Stredulinsky, E.W.: Extensions of Moser-Bangert theory. In: Progress in Nonlinear Differential Equations and their Applications, Locally minimal solutions, vol. 81. Birkhäuser/Springer, New York (2011)
Silvestre, L.E.: Regularity of the obstacle problem for a fractional power of the Laplace operator. ProQuest LLC, Ann Arbor, Thesis (Ph.D.)—The University of Texas at Austin (2005)
Stein, E.M.: Singular integrals and differentiability properties of functions, Princeton Mathematical Series, No. 30, Princeton University Press, Princeton (1970)
Sire, Y., Valdinoci, E.: Fractional Laplacian phase transitions and boundary reactions: a geometric inequality and a symmetry result. J. Funct. Anal. 256(6), 1842–1864 (2009)
Savin, O., Valdinoci, E.: \(\Gamma \)-convergence for nonlocal phase transitions. Ann. Inst. H. Poincaré Anal. Non Linéaire 29(4), 479–500 (2012)
Sire, Y., Valdinoci, E.: Density estimates for phase transitions with a trace. Interfaces Free Bound 14(2), 153–165 (2012)
Savin, O., Valdinoci, E.: Some monotonicity results for minimizers in the calculus of variations. J. Funct. Anal. 264(10), 2469–2496 (2013)
Savin, O., Valdinoci, E.: Density estimates for a variational model driven by the Gagliardo norm. J. Math. Pures Appl. (9) 101(1), 1–26 (2014)
Valdinoci, E.: Plane-like minimizers in periodic media: jet flows and Ginzburg-Landau-type functionals. J. Reine Angew. Math. 574, 147–185 (2004)
Acknowledgements
This work has been supported by the ERC Grant 277749 “EPSILON Elliptic PDE’s and Symmetry of Interfaces and Layers for Odd Nonlinearities”, the PRIN Grant 201274FYK7 “Critical Point Theory and Perturbative Methods for Nonlinear Differential Equations” and the Alexander von Humboldt Foundation.
Author information
Authors and Affiliations
Corresponding author
Additional information
In honor of Professor Paul Rabinowitz, with great esteem and admiration.
Rights and permissions
About this article

Cite this article
Cozzi, M., Dipierro, S. & Valdinoci, E. Nonlocal phase transitions in homogeneous and periodic media. J. Fixed Point Theory Appl. 19, 387–405 (2017). https://doi.org/10.1007/s11784-016-0359-z
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11784-016-0359-z