
Abstract
Background
This paper is Part 2 of a study on the scope of the ultrasonic Surface Reflection Method (SRM). Part 1 deals with the theoretical conditions for a satisfactory usage of this method.
Objective
This second part validates the practical feasibility and reliability of the SRM method by comparison with the conventional Transmission Method (TM) in cases where the latter is applicable.
Methods
Two experimental devices (one for SRM and one for TM) are developed and measurements of shear and bulk moduli are carried out at ultrasonic frequency (610 kHz) and at room temperature.
Results
The experimental conditions in terms of sample geometry, pulse characteristics and interfacial transmission required to obtain a given accuracy on the measurement are stated. The SRM is then validated against other experimental methods and is used to determine the shear modulus of a carbon black filled neoprene at ambient temperature (T = 21 °C) and ultrasonic frequency.
Conclusions
The benefit brought by this method is well demonstrated: a unique measurement allows the determination of all the moduli of a highly damping isotropic material (carbon black filled neoprene) not achievable by other methods.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
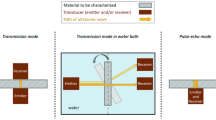
Ultrasounds have been used since a long time to measure the mechanical properties of materials. The most commonly used techniques are the Transmission Method (TM), the Transmission in Water Bath Method (TWBM) and the Pulse-echo method (BRM). These three methods and their respective advantages and limitations are described in detail in Part 1. It has been proved that they do not apply in case of transverse waves in rubber-like materials due to the too high attenuation [1, 2]. Another existing technique is the Surface Reflexion Method (SRM) that has been first described by Mason et al. [3] and O’Neil [4]. Since, this technique has rarely been applied as it presents difficulties of experimental implementation [5,6,7]. In the Part 1 of this paper, it has been proved that the SRM can only be applied if the reference material is adapted to the material to be tested and if very high accuracy in the measurement of phase and amplitude of the two waves is obtained.
The present paper describes the experimental conditions in terms of sample geometry, pulse characteristics and interfacial transmission required to obtain a given accuracy on the measurement. The SRM is then validated by comparison with the TM for an elastic material (aluminium) and a viscoelastic material (carbon black filled neoprene). Finally, it is used to determine the shear modulus of a carbon black filled neoprene at ambient temperature (T = 21 °C) and ultrasonic frequency.
Experimental Setups
Two ultrasonic measurement methods are used in this study. The first one is the traditional TM. The corresponding experimental setup is illustrated in Fig. 1. Tests are performed on two samples of different thicknesses (L and 2L) to eliminate the influence of the transmission coefficient at interfaces between the transducers and the material.

Illustration of the Transmission Method (TM)
Once the tests have been carried out, the ratio of the amplitudes of the two transmitted waves (one for each sample thickness) U is computed using Eq. (1).
The attenuation value in the material is deduced from the ratio thus obtained and modified by a coefficient taking into account the diffraction phenomenon (see Practical Condition).
The phase velocity of the transmitted waves is also determined according to the usual formula:
with \(\Delta \mathrm{t}\) the difference of transit times between the two thicknesses.
The values of α and c are then used to calculate the desired measurands (either P-wave moduli M’ and M” or shear moduli G’ and G”) according to Eq. 6 of Part 1.
The second ultrasonic method used here is the SRM that is illustrated in Fig. 2. This method is based on the measurement of the ratio of the amplitude of the reflected wave at the interface between two materials to the amplitude at the air interface. The two materials are bonded together by means of cyanoacrylate glue under a loading of 40 kPa. The glue thickness obtained can be considered negligible (typically less than 0.03 mm) in front of the longitudinal and transverse wavelengths at 610 kHz (\({\uplambda }_{\mathrm{l}}=4.4\mathrm{ mm and }{\uplambda }_{\mathrm{t}}=2.3\mathrm{ mm}\)).

Illustration of the Surface Reflection Method (SRM)
A longitudinal wave transducer (V 189-RB, 38.1 mm active diameter, 610 kHz central frequency, Olympus Corporation, Tokyo, Japan) and a shear wave transducer (V 151-RB, 25.4 mm active diameter, 610 kHz central frequency, Olympus Corporation, Tokyo, Japan) were used to perform the experiments. A PXIe-1073 waveform generator card (National Instruments, Austin, Texas, USA) produced an electrical signal transferred to the transducers. The received signal was averaged over 200 bursts to enhance the signal-to-noise ratio. A LabVIEW® script allowed to control the ultrasonic measurements.
The formulas for determining measurands are detailed in Part 1 of this article (Sect. 2.2.2. Equation (15)). For both methods, the amplitude, phase and actual frequency values are obtained by performing a Hilbert transform on the raw signal (see Validation).
The coupling between the transducer and the sample is traditionally performed by means of a couplant, the effect of which must be taken into account in the measurements. The couplant thickness has a significant effect on the value of the amplitude and phase of the transmitted wave. It is therefore imperative to perform echo measurements on air and on the material to be characterised under conditions of identical couplant thicknesses. However, it is difficult to control the initial couplant thickness. To ensure that measurements are always made under similar conditions, a pressure of 80 kPa is exerted for 12 h on the transducer after mounting the device (see Fig. 3). This time of 12 h was determined from the flow equation of the couplant (incompressible Newtonian fluid) between the transducer and the sample and prior measurement of its viscosity (μ = 835 Pa.s).

Illustration of the setting up of the couplant
According to Leider & Bird [8], the relation between the mean pressure exerted on the couplant and its thickness h is:
where \(\upmu\) represents the Newtonian viscosity.
Solving Eq. 4 gives the evolution of the couplant thickness as a function of time, with the initial thickness \({\mathrm{h}}_{0}\) as a parameter.
Figure 4 below considers four possible initial couplant thicknesses and presents their evolution over time. The results indicate that it takes a minimum of 10 h for the initial coupling thickness to no longer have an influence: after this waiting time, the obtained couplant thickness is identical whatever the initial conditions are.

Time evolution of the couplant thickness for various initial thicknesses
An alternative method proposed by Simonetti and Cawley [9] is to apply a moderate normal stress to the interface between the waveguide and the material to be studied. It requires, however, sufficiently smooth surfaces to avoid voids between the contacting surfaces.
Settings
Choice of Reference Material
The first part of this paper determines the reference material’s mechanical characteristics to obtain a given error margin (typically 10% error on measurands when considering a 1% error on the amplitude measurement). Part 1 indicates that the moduli ratio of the acoustic impedances of the two materials in contact has to be close, typically in the 0.6 to 1.6 range. In addition, this reference material must not be too damping in order to reduce attenuation in the medium, thus preserving a sufficient signal amplitude. Given these conditions, different types of materials are considered in order to determine the most relevant one in the case at stake here, i.e. coupling with neoprene.
Different types of materials are considered as potential reference materials: metals, glass or polymers. The acoustic properties of the selected materials are presented in Table 1.
Since there are no values in the literature for the shear wave velocity in neoprene, it was necessary to rely on the properties of a similar material (such as NBR) in order to obtain an order of magnitude of the acoustic impedance of neoprene and thus determine the most relevant reference material. Values found in the literature are presented in Table 2.
In the case of a progressive plane wave, the acoustic impedance is determined by Eq. (6) (from Eqs. (6) and (8)in Part 1). Attenuation is assumed to be negligible for reference materials.
Figure 5 represents the impedance moduli ratios of the two materials considered (potential reference material and rubber-like material). The obtained results show that metals and glass are not suitable as reference materials since their ratios are not in the optimal range between 0.6 and 1.6. Note that in Mason [3] and O'Neil's study [4], the reference material is fused quartz (glass-like material), which explains their choice to use oblique incidence to increase the accuracy of the measurement.

Impedance moduli ratio between rubberlike material and reference materials at ambient temperature. The grey area represents the range of impedance ratios required
On the other hand, some polymers considered (PMMA, PEEK and PVC) all have ratios in the optimal zone. The final choice of reference material is PMMA, as this material is available, inexpensive and above all transparent. Fortunately, this transparency allows a first visual verification of the quality of the bonding between the reference material and the material to be tested.
Practical Conditions
It has been shown that, in order to be applied, SRM requires a very high measurement accuracy on the amplitude and phase of the reflected wave in permanent regime. Although TM is less sensitive to measurement accuracy (see Part 1), the same approach to sample sizing has been adopted for both methods. To achieve this high accuracy requirement, the number of periods of the emitted wave train and the dimensions of the samples for reference material and material to be characterised need to be precisely specified.
In a first step, the minimum number of periods of the emitted wave train will be estimated. As indicated in Part 1 of this paper, the resolution of the wave propagation equation in a continuous medium is carried out by considering the steady state regime reached. Nevertheless, the exact solution of the equation for viscoelastic materials has a transient term. Hence, the amplitude and phase of the reflected wave have to be determined after the transient term has become negligible in comparison with the steady state.
The ratio between the transient term and the amplitude of the steady state is given by Eq. (7) at given pulsation ω and at a given relaxation time τ (see Appendice for details).
Figure 6 represents the evolution of \(\upgamma\) at a given number of periods of the emitted wave train in function of r.

Evolution of \(\gamma\) at a given number of periods of the emitted wave train in function of r
It has been considered that, in the worst case, the influence of the transient term does not distort the measure of the steady state below 2%. This condition is reached for an emitted wave train containing three periods and, at least, one additional period has to be appended for amplitude and phase estimation. Thus, a minimum of four periods is required to achieve desired accuracy. According to the effective thicknesses of our samples, it is suggested that the number of periods of the emitted wave train corresponds to the maximum number of periods respecting the conditions of non-overlapping, conditions which are detailed below.
In a second step, the dimensions of the samples will be specified in order to avoid the overlapping of the signal of interest with secondary echoes.
Amongst the most noticeable secondary echoes are:
-
The backing echo: all transducers own a backing material through which a backward wave propagates, reflects at the back of the transducer and finally re-reaches the piezoelectric membrane. This echo changes in amplitude and localisation in function of temperature. Although the amplitude of this echo is weak and is usually neglected, it has to be taken into account if the signal itself is of low amplitude.
-
The second echo corresponds to two travels forward and back through the reference material.
-
The pressure wave echoes when using a shear wave transducer: all shear wave transducers emit a non-negligible fraction of pressure wave.
-
The bottom echoes: the wave transmitted at the interface reflects at the back of the tested material.
-
The potential conversions at the interface between the two materials: longitudinal waves may be partially converted into transverse waves due to interfacial roughness or/and to unplanarity of the incident wave.
The conditions on the transit time of interest in function of the others characteristic times for the two considered methods (TM and SRM) are respectively summarised in Tables 3 and 4. The minimum sample thicknesses for a frequency of 610 kHz complying with all non-overlapping conditions for the two methods under consideration is synthesised in Table 5.
-
\({\mathrm{t}}_{\mathrm{m}}\) is the transit time of the first echo:
-
Subscripts l and t respectively refer to longitudinal and transverse waves
-
Subscripts 1 and 2 respectively refer to reference material and material to be characterised
-
-
\({\mathrm{t}}_{\mathrm{t}}\) is the transit time of the backing echo
-
\({\mathrm{t}}_{\mathrm{e}}\) is the pulse duration
The last aspect for dimensioning the samples is the shape of the beam emitted by the transducer according to the Rayleigh diffraction theory. In the near-field, the mean wave intensity is constant. At the contrary, in the far-field, the intensity decreases with the square of the distance to the transducer, which has to be taken into account for the determination of the attenuation coefficient in TM. Near-field lengths \({\mathrm{x}}_{\mathrm{c}}\) for the three considered materials at a frequency of 610 kHz are given in Table 6.
Taking into consideration the values in Tables 5 and 6, the final sample thicknesses are presented in Table 7. For the sake of simplicity, the two sample thicknesses required for TM are in near-field for PMMA and neoprene, and in far-field for aluminium, the conditions of minimum thickness and near-field length being incompatible.
Results
Tests are performed using ultrasonic pressure and shear transducers. The emission frequency is 610 kHz, which corresponds to the centre frequency of the transducers used. All experiments are carried out at constant temperature (T = 21 ± 0.1 °C).
Experimental Determination of the Reference Material Characteristics
The determination of PMMA characteristics is performed using the TM. Results in terms of wave velocities and attenuation coefficients for longitudinal and transverse waves are respectively presented in Figs. 7 and 8. The values obtained are consistent with those found in the literature [16, 17, 18, 19].

Longitudinal wave velocity (a) and attenuation (b) in PMMA as a function of frequency at room temperature

Transverse wave velocity (a) and attenuation (b) in PMMA as a function of frequency at room temperature
Using Eq. (6) of Part 1, the values of the various moduli sought are summarised in Table 8. The results are compared with values obtained by a non-ultrasonic method based on time–temperature superposition [20].
Validation
In order to validate the SRM, two types of materials are tested: an elastic material (aluminium) and a viscoelastic material (carbon black filled neoprene). In both cases, the reference material used is PMMA. Two types of ultrasonic waves are used here: longitudinal waves (to determine the P-wave moduli M’ and M”) and transverse waves (to determine the shear moduli G’ and G”). The experimental values obtained with SRM are compared with those obtained during transmission tests when possible.
The results for aluminium are synthesised in Table 9. The values are consistent for modules M' and G'. It can be noted that the error is higher when using SRM than with TM, which was expected based on the findings in Part 1. For the M" and G" modules, the values obtained are no longer meaningful due to the very high error obtained with SRM. Once again, these results were expected since aluminium is an elastic material.
The results for neoprene (only for longitudinal waves) are presented in Table 10. The values of M' and M" found with the two methods are consistent and the error obtained with the SRM is, this time, quite acceptable.
Determination of the Shear Mechanical Properties of Neoprene
After the SRM has been validated, it is applied to determine the shear moduli of carbon black filled neoprene at constant temperature (T = 21 ± 0.1 °C) and at a 610 kHz frequency. The recorded raw signals are provided in Fig. 9. On this graph, the green frame indicates the time range over which the Hilbert transform of the signals is performed. This transform provides an evaluation of the phase, amplitude and frequency of each signal, as shown in Fig. 10. As can be seen, the main characteristics of the signals (phase difference, amplitudes and frequencies) are constant over the observation window. Thus, the various moduli are calculated and presented in Table 11 in comparison with values from the literature for materials of similar behaviour (computed using master curves based on DMA measurements or based on supersonic wave measurements). The values obtained are of the same order of magnitude as those found in the literature. The differences observed can be explained by the variability of the materials compared as well as frequency and temperature conditions.

Evolution of the echo’s amplitude as a function of time (transverse wave)

Amplitudes, frequencies and difference of phase of the signal obtained by Hilbert transform
From these moduli, it is possible to recalculate shear wave velocities and attenuations (see Table 12). These values enable us to demonstrate that TM is indeed not suitable for this type of material. The high value obtained for attenuation would imply, for a sample thickness of 1.5 cm, to be able to measure an amplitude ratio of the order of 9e-45 (Eq. (2)), which is impossible in practice. In order to obtain a measurable amplitude ratio, the thickness of the sample should be of the order of 1 mm. However, this weak thickness introduces other drawbacks. Indeed, as indicated in Practical Conditions, an emitted wave train with a minimum of three periods is required to reach a steady state regime. In view of the shear wave velocity and frequency considered, this would imply a minimum sample thickness of 2 mm, which is inconsistent with the maximum value of 1 mm found previously.
Moreover, each shear transducer also emits a small fraction of pressure waves (see Practical Conditions). For the used transducer, the ratio (experimental value) between the emitted amplitudes of pressure waves and shear waves is 0.03.
Based on the wave velocity and attenuation values obtained during the tests, it is possible to rebuild the theoretical signal received by a shear transducer (see Fig. 11) after transit through a one millimetre thick sample. It appears that it is difficult to determine the transit time of the shear wave, since it is drowned in the middle of the pressure wave with, in addition, a much weaker amplitude.

Evolution of the theoretical signal received by a shear transducer after transit through a one millimetre thick sample
Conclusion
The objective of this study was twofold: on the one hand, to provide all the practical conditions for the implementation of SRM, and on the other hand, to measure the high frequency shear moduli of an elastomer at room temperature.
In order to correctly dimension and configure the measuring system, three physical phenomena have to be considered. Firstly, the duration of the transient phase must be taken into account in the case of a viscoelastic solid: calculations prove that an emitted wave train with three periods is needed to ensure that a quasi steady state regime is reached. Secondly, the sample thicknesses should be chosen so as to avoid the overlapping of the different echoes occurring. Finally, the waiting time and the load applied to the couplant must be such that a reproducible couplant thickness can be obtained regardless of its initial thickness. This analysis of the optimal conditions for the application of the SRM allowed measurements to be performed with satisfactory accuracy. It appears that SRM can be used to determine all the modules of a highly damping isotropic material.
References
Ferry JD (1980) Viscoelastic properties of polymers. John Wiley & Sons
Burg EVD, Grill W (2010) Characterization of elastomers with transverse sonic waves. Polym Test 29:281–287. https://doi.org/10.1016/j.polertesting.2009.12.001
Mason WP, Baker WO, McSkimin HJ, Heiss JH (1949) Measurement of shear elasticity and viscosity of liquids at ultrasonic frequencies. Phys Rev 75:936–946. https://doi.org/10.1103/PhysRev.75.936
O’Neil HT (1949) Reflection and refraction of plane shear waves in viscoelastic media. Phys Rev 75:928–935. https://doi.org/10.1103/PhysRew.75.928
Alig I, Sulimma J, Tadjbakhsch S (1997) Ultrasonic shear wave reflexion method for measurements of the viscoelastic properties of polymer films. Rev Sci Instrum 68:1536–1542. https://doi.org/10.1063/1.1147643
Yoneda A, Ichibara M (2005) Shear viscoelasticity of ultrasonic couplers by broadband reflectivity measurements. J Appl Phys 97. https://doi.org/10.1063/1.1850180
Chang J-J, Li Y-Y, Zeng X-F et al (2019) Study on the viscoelasticity measurement of materials based on surface reflected waves. Materials 12:1875–1890. https://doi.org/10.1063/1.4918787
Leider PJ, Bird RB (1974) Squeezing flow between parallel disks. I. Theoretical analysis Ind Eng Chem Fundam 13:336–341. https://doi.org/10.1021/i160052a007
Simonetti F, Cawley P (2004) Ultrasonic interferometry for the measurement of shear velocity and attenuation in viscoelastic solids. J Acoust Soc Am 115:157–164. https://doi.org/10.1121/1.1631944
Kawashima K (1984) Quantitative calculation and measurement of longitudinal and transverse ultrasonic wave pulses in solid IEEE Transactions on Sonics and Ultrasonics 83–93. https://doi.org/10.1109/T-SU.1984.31480
Guyott CCH, Cawley P (1988) The measurement of through thickness plate vibration using a pulses ultrasonic transducer. J Acoust Soc Am 83:623–631. https://doi.org/10.1121/1.396156
Sutherland HJ (1978) Acoustical determination of the shear relaxation functions for polymethyl methacrylate and Epon 828Z. J Appl Phys 49:3941–3945. https://doi.org/10.1063/1.325403
Fitch DA, Hoffmeister BK, De Ana J (2010) Ultrasonic evaluation of polyether ether ketone and carbon fiber-reinforced PEEK. J Mater Sci 45:3768–3777. https://doi.org/10.1007/s10853-010-4428-1
Afifi HA (2003) Ultrasonic pulse echo studies of the physical properties of PMMA, PS, and PVC. Polym – Plast Technol Eng 42:193–205. https://doi.org/10.1081/PPT-120017922
Nolle AW, Sieck PW (1952) Longitudinal and transverse ultrasonic waves in a synthetic rubber. J Appl Phys 23:888–893. https://doi.org/10.1063/1.1702325
Asay JR, Lamberson DL, Guenther AH (1969) Pressure and Temperature depedance of the Acoustic Velocities in Polymethylmethacrylate. J Appl Phys 40:1768–1783. https://doi.org/10.1063/1.1657846
Tran HTK, Manh T, Johansen TF, Hoff L (2016) Temperature Effects on Ultrasonic Phase Velocity and Attenuation in Eccosorb and PMMA, in: IEEE Int. Ultrasonics Symp. Proc 2016.
Biwa S, Ito N, Ohno N (2001) Elastic properties of rubber particles in toughened PMMA: ultrasonic and micromechanical evaluation. Mech Mater 33:717–728. https://doi.org/10.1016/S0167-6636(01)00087-4
Aksoy HG (2016) Broadband ultrasonic spectroscopy for the characterization of viscoelastic materials. Ultrasonics 67:168–177. https://doi.org/10.1016/j.ultras.2016.01.012
Capodagli J, Lakes R (2008) Isothermal ciscoelastic properties of PMMA and LDPE over 11 decades of frequency and time : a test of time-temperature superposition. Rheol Acta 47:777–786. https://doi.org/10.1007/s00397-008-0287-y
Fritzsche J, Klüppel M (2011) Structural dynamics and interfacial properties of filler-reinforced elastomers. J Phys: Condensed Matter 23:1–11. https://doi.org/10.1088/0953-8984/23/3/035104
Ivaneiko I, Toshchevikov V, Saphiannikova M et al (2016) Modeling of dynamic-mechanical behavior of reinforced elastomers using a multiscale approach. Polymer 82:356–365. https://doi.org/10.1016/j.polymer.2015.11.039
Hao D, Li D (2015) Determination of dynamic mechanical properties of carbon black filled rubbers at wide frequency range usinf Havriliak-Negami model. Eur J Mech A/Solids 53:303–310. https://doi.org/10.1016/j.euromechsol.2015.06.002
Omata N, Suga T, Furusawa H et al (2006) Viscoelasticity evaluation of rubber by surface reflection of supersonic wave. Ultrasonics 44:211–215. https://doi.org/10.1016/j.ultras.2006.06.019
Acknowledgment
The authors wish to thank: P. Wolff from the University of Strasbourg for helping during the experimental developments, Pascale Lenig-Santoro for providing language help, Demathieu et Bard industry for their financial support, the National Center for Scientific Research (CNRS) for their financial support, the Robert Schuman Institute of Technology, part of the University of Strasbourg for kindly hosting the experiments and making available their experimental devices and, as well, for their financial support.
Author information
Authors and Affiliations
Contributions
All authors contributed to the study conception and design. Material preparation, data collection and analysis were performed by Violaine Tinard, Pierre François and Christophe Fond. The first draft of the manuscript was written by Violaine Tinard and all authors commented on previous versions of the manuscript. All authors read and approved the final manuscript.
Corresponding author
Ethics declarations
Ethical Statement
All authors certify that they have no affiliations with or involvement in any organization or entity with any financial interest or non-financial interest in the subject matter or materials discussed in this manuscript.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
The duration of the transient term is equivalent to the relaxation time of the viscoelastic material. It is well known that for polymer materials it exists a large range of relaxation times and in consequence a large range of transient term durations. A generalized Maxwell model often represents this behaviour. Let us consider the ith branch of the Maxwell model, the associated stress is solution of Eq. (8):
where \({\uptau }_{\mathrm{i}}=\frac{{\upeta }_{\mathrm{i}}}{{\mathrm{D}}_{\mathrm{i}}}\), \({\upeta }_{\mathrm{i}}\), ε and \({\mathrm{D}}_{\mathrm{i}}\) respectively represents the relaxation time, the viscosity, the deformation and the associated modulus of the ith branch.
Considering a sinusoidal deformation starting at t = 0, the solution of Eq. (9) is:
With \(\mathrm{r}=\upomega {\uptau }_{\mathrm{i}}\)
Rights and permissions
About this article

Cite this article
Tinard, V., François, P. & Fond, C. The Potential Scope of the Ultrasonic Surface Reflection Method Towards Mechanical Characterisation of Isotropic Materials. Part 2. Experimental Results. Exp Mech 61, 1161–1170 (2021). https://doi.org/10.1007/s11340-021-00731-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11340-021-00731-8