
Abstract
According to the development of open sea hydrologic environment monitoring technology in China, and combining with the demand characteristics of supporting marine environment in the future, a new ocean contingency monitoring system was established, which based on the technologies of unmanned air vehicles, meteor burst communication and marine field detection. This paper discusses the developing needs of the field detection technologies of the marine environment, research status in the relevant fields of China and some developed countries, then focuses on discussing the main components of the new system, laying mode, compares the technical characteristics with the existing similar systems, and how to break through the technical bottlenecks at present, includes the system’s mobility, data remote transmission and synchronizing observation. Then, the research and development of field detection technology are introduced briefly. All these will be helpful to settle the foundation of such theories as efficiently promoting the security, concealment and survivability of open sea hydrologic environment monitoring.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Marine monitoring has experienced the development from traditional land earth stations and ship-borne method to 3D monitor system which integrates diverse manners such as satellites, airplanes, ships, buoys, bank-based observation stations, platforms and voluntary ships in China [1, 2], which is preliminarily capable to monitor the marine environment of inshore, offshore and open sea. It is expected to improve the existing technologies in the aspect of open sea in situ monitoring. The monitoring methods including buoys, submerged buoys, bank-based stations, seabed-based underwater-fixed stations and ship-based immovable locations, they can only observe the constituents of marine environment in certain point, area or level [3]. Meanwhile, such disadvantages as in situ observations are extremely restricted by hazardous marine environment, data observed synchronously at several stations are difficult to obtain, poor mobility, high cost for observation and poor stubbornness exist in ship-based observations. While the remote sensing technology has merits such as macro-scale, rapidness, synchronization and high frequency in dynamic observation [4], but the dynamical features beneath the subsurface are beyond the reach of this method, it can just observe some environmental constituents on and above the ocean surface, and seriously affected by cloud cover, scanning tracks and frequencies, etc.
In addition, the limited transmitting capability and high cost for open sea environment monitoring data make it difficult to guarantee timeliness, secrecy and security when emergent transmitting [5]. For instance, those data observed by submarine buoys, submarine tripod and ship-based stationary locations or underway are commonly gathered up by ships, then transmitted from inland. Rented satellites such as Argo satellites or Chinese Compass satellites [6, 7] are generally used to transmit data observed by buoys including drifting ones, moored ones and automatic underwater vehicle (AUV) [8].
Above analysis shows that it is indispensable and exigent to establish new mobile open sea hydrologic environment monitoring system regarding, which current platforms of measurement are unable to meet the needs to monitor open sea hydrologic environment in particular circumstances. To serve the Belt and Road Initiative strategy, development of the marine environment monitoring technology is to help us to know and understand the ocean further; development should serve the society and economy, also need to service in the disaster prevention and mitigation.
2 The Demand and Development of Modern Marine Monitoring Technology
The sudden disasters and marine dynamic processes have their common needs, which summarize as follows:
-
1.
The duration of monitoring is transient, and the demand of the detection point is relatively dense.
Figure 1 shows the temporal and horizontal spatial scale of some important marine phenomena [9], the oval areas express some ocean phenomena; the shaded rectangular area expresses the new system’s temporal and spatial coverage, which includes the important marine phenomenon in the disaster prevention and mitigation.
Fig. 1 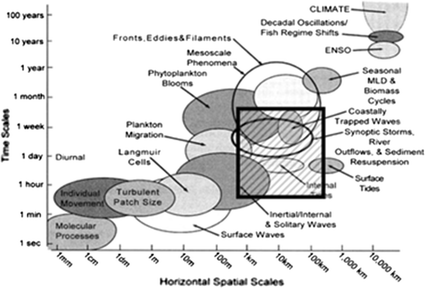
The temporal and horizontal spatial scale of some important marine phenomena
It usually lasts a few weeks for monitoring the strong dynamic process of marine disasters; the detection unit of system does not have to be too high on their ability to work continuously to the mission needs. The marine environmental factors such like temperature and salinity need be sampling interval between 10 min such as airborne expendable bathythermograph (AXBT) and airborne expendable CTD (AXCTD), to a few hours such as drifting buoy.
-
2.
The monitoring area is always far away from the coast, the marine environmental data are observed with high timeliness and small space requirements.
Some strong marine dynamic processes, especially marine dynamic processes in deep sea, accompany most sudden disasters so the new system must have the ability to reach the target detection quickly loading the monitoring instrument. The horizontal spatial scale is relatively small, which resolution is several hundred meters, and the coverage radius is about 500 km, which can meet the needs of most tasks.
Figure 2 provides a simple method for evaluating the temporal and horizontal spatial ranges according to different observation platforms [9]. As can be seen in the figure, the existing observational capabilities are seriously inadequate, even combined use of several platforms.
Fig. 2 
The range of time and horizontal spatial obtained using different observation platforms
Some platforms have poor mobility, and have disability to reach the target area quickly, such as AUV, drifting buoys and underwater gliders. Some platforms are only applicable to offshore, such as shore based HF radar, even the shipborne HF radar will equipped recently, its maneuverability, safety and detection range is very limited. Other platforms are expensive to implement, and cannot dive deep into the sea, such as aircraft and satellite remote sensing.
-
3.
The ability to synchronize the multi elements of the marine environment in the target area should be possessed.


At present, China basically have the synchronous monitoring ability for most offshore hydrological factors, while have not the synchronous monitoring ability for most open sea hydrological factors under the sea surface, while the hydrological and meteorological elements over the sea surface can be observed synchronously by professional meteorology and marine aircrafts and satellites. At present, ship borne survey is the most commonly method to measure the seawater hydrological factors profiles by XBT, ADCP XCTD, and towed CTD, and the fixed-point observation of ship takes a long time.
Developed countries such as America and Japan, have developed AXBT [10] for marine hydrology since 1960s. The series of products can measure temperature, salinity, depth and current, which have applied to the United States Navy, rapidly acquire real-time data of multi-constituents in target area open sea through the same platform in a single mission route. Moreover, it is the best mobility way using so far. Which advantages and disadvantages are the high mobility in obtaining hydrological constituents, lower exploring cost, better mobility and real-time in data acquisition compared with shipboard system and poor survivability, concealment and security in monitoring marine environment under extremely disastrous conditions, respectively. Aircrafts are the key point in the whole system because they take up dual tasks, which are deploying probes and collecting data on the spot. However, the use of them in emergency is severely restricted by the synoptic conditions above the target area. Once be destroyed, the missions for hydrological detection would fall into thorough failure and may even cause losses of lives. Furthermore, when adopting the manner of VHF transmission method [11], it cannot achieve that what refers to pre-deployment and synchronizing observation at multi-locations owing to that measurement and collection of data can only carried through in terms of the deploying sequence.
In the end of 1990s, China started to research on the related technology of airborne disposable temperature, salinity and depth buoy [12], which structure and operation system is basically same with the existing system, the salinity measurement sensor, design of subsides probe shape and structure, key technology, probe motion model sinking probe signal transmission, release mechanism, VHF wireless transmitting and receiving module, and so on. The anti-impact ability has made an important breakthrough, but so far, there is few application report.
The system operating system is the carrier of scientific investigation using reconnaissance or manned aircraft as distribution and data collection, on board data collection system on the detection unit in the target area, only detect for marine hydrological profile. The field detect unit drops into the water, adjusts attitude and releases the profile probe to measure, meanwhile sent to the data by VHF wireless transmission to the airplane. The detecting time of a single probe lasts from a few minutes to 10 min, which is depends on the quality, shape and depth of the probe.
Compared with the ship detection system, this method has low cost, better mobility and more real-time to obtain the ocean hydrological factors, but in the disaster prevention and mitigation application, its security, concealment and survival have great defects. The manned aircraft is the key to complete the deployment of the site detection unit, and wait to collect data, but it is affected by field weather conditions with a huge risk. In addition, the system uses wireless VHF transmission mode, the plane waiting to receive the data in a small area at a time, and cannot achieve synchronous detection of multiple probes in multiple regions.
3 The Concepts About the New System
The new system efficiently integrate the technologies of UAVs, meteor burst communication and marine field exploration as its kernel character. It is designed for synchronously monitoring the multi-constituents of marine hydrologic environment from a faraway region securely and movably clandestinely and survivability by efficiently combining the advanced techniques of batteries and materials and processes to enrich the modern supporting means of marine environment.
The new system is primarily composed of the mobile unit of UAVs and corresponding launch control, the subscriber unit based on ship and seashore, the control station unit which control collect and process probe data, and the field expendable probes unit.
According to the existing technical capabilities of the UAV, the layout is designed in three ways: the real-time control mode, the default route mode and the limit mode, as shown in Fig. 3. Among them, real-time controlled manner suitable for use in ships, have best flexibility and the shortest period on the way; default route mobility and the best price, and is suitable for general application; the limit is emergency in case of emergency, high cost.

Three deploy manners of in the new system
The basic working process of the system is: set the target area and laying mode according to the detection task, through the mobile launch vehicle or ship launch the UAV; the UAV arrives to the target area, launch the field detection unit with the parachute, open up the antenna, and to achieve the volume expansion. Adjust for the upright posture after drop into the water, enter a latent state, keep in touch through the meteor burst communication technology and flow over master station. Then received detection instructions, all field detection unit at the same time release profile probe in a specified time; hydrological information acquisition process in different depth probe sinking, transmitted through a transmission line to the main floating body concurrent, return more than the main station, synchronous detection multi point and multi-regional ocean profile hydrological factors.
Better mobility, concealment and security could be achieved in field deployment mission when the units of expendable are carried by UAVs, then launched to extremely faraway target region. The deployment can be designed for three manners according to existing capability of UAVs (Fig. 3):
-
1.
Real-time controlled, UAVs are launched on the platform located at seacoasts, islands or ships which within an area that very closed to the target region. What’s more, these UAVs are under control all the way. Each deployment location is directly controlled by measurement and control platform.
-
2.
Pre-set route, Launch sites are on islands or ships that far from the target region. UAVs are launched when scheduled skyway and deployment site is set. Hereafter, exploring units will be deployed in turn under the control of certain programs. What needs to be mentioned is that UAVs can be recycled.
-
3.
Ultimate manner, launching sites can be deployed simultaneously with control station. This manner is similar as the pre-set routes manner in the aspect of launching UAVs and the expendable probes, except for that the expendable probes are deployed within the extent of ultimate voyage. UAVs are used for disposable yet and would not be recycled. Among these three manners, the second one is universally applied for its best mobility and high ratio of efficiency and expenses, while the first one is fit for survey ships, with best agility and shortest deploy cycle. The third manner can be used in emergency, but more expensive. As the launch platforms of UAVs in the new system, mobile units which carried by vehicles or ships may accomplish all the functions of those three manners mentioned above.
Field data can be retrieved more concealed and low-cost targets can be operated if meteor burst communication [13] is used for the expendable probes to complete the mission of exploration control and data recover/retrieve extremely far from the target region. The new system takes the control station as its information backbone to control expendable probes deployed in exploring area or along the skyway and recover data during the whole executing cycle of task. Therefore, this can enhance the privacy and anti-jamming ability. Finally, data collected from several locations are processed to generate corresponding application products and subsequently distributed to users.
As the direct executor, after a scientific design of pint-sized integration, several expendable probes can be carried by UAVs at one time and be bestrewed to target region or skyway. Hereafter, synchronous field measure can be implemented under the control of station (Fig. 4). In addition, it is reasonable to continuously develop series of products of expendable probes in the new system by using the successful experience abroad for reference. The focus should be laid on the miniaturization of micro-probes used for monitoring different hydrologic constituents, and the reasonable programming for forthcoming products’ primary modes, functions and elementary frameworks and so on. After analyzing and predicting, domestic and overseas demand trends of one same category of products and comprehensively comparing the aspects of technology and economy through considering domestic technical condition of manufacturing.

Field deploying of expendable probes in the new system
Compared with similar systems abroad (SSA), the most prominent technical advantages of the new system (NS) proposed in this paper are its better mobility, concealment, better privacy and anti-jamming ability in data recovery, lower cost in construction, operation and maintenance. Besides, it can safely accomplish missions for target region and important skyway and can implement synchronous exploration at more than one site. What’s more, exploring units can deploy in advance and obtain according to needs. The innovations described in Table 1.
As can be seen from the table, because of the working principle of the system and the operating system is different, the new system in many aspects of the advantages are obvious, but correspondingly, the system has higher technical requirements.
Through the analysis and forecast of the same kind of products at home and abroad demand trends, combined with the conditions of production technology at home and abroad, through the comprehensive technical and economic comparison, it is very necessary to the main type, future product function, basic structure and planning reasonable arrangements.
With excellent mobile platform, mobile field measurement can not only far SST - Salt - depth, velocity and velocity profile of elements, also the surface flow velocity, flow rate, water transparency sea hydrological elements, and even be equipped with detectors (such as small marine meteorological rocket) for meteorological observation sea above the surface of the sea, its great potential applications.
4 Development Strategies and Efficiency Analysis of the New System
Currently, it is appropriate for the new system to take the fulfilling mobile open sea monitoring of the constituents, concretely to research the temperature and depth in the beginning. The relevant peripheral technologies and research circumstances needed in developing the new system are basically ready [14,15,16].
During the process of introducing new technologies including UAVs and MBC into the new system, the key point is the research of airborne and the expendable probe. Between, the expendable probe is the core while devising the other one has to take the status of domestic technology of UAVs in existence into consideration adequately.
The research of control station can be put into practice on the existing technical platform and principally assure that the new system can restrict the designing size and functions of MBC affiliated stations. It needs to consider the actual situations of each subsystem in design to solve the problems such as how to choose and process raw materials, how to select appropriative batteries and so on one by one.
The validity of using the new system to monitor open sea hydrologic environment is mostly expatiated from such three aspects as spatial and temporal adaptability of obtaining open sea hydrologic constituents, security and privacy of acquiring information and capability of quick arrival.
-
1.
Meet the request of spatial and temporal adaptability.
The new system can be deployed a few days ahead through the field expendable probes. It can also meet the practical needs in mission areas or along important skyways when exploring manner is started up according to request and under control. The length of preclinical cycle can be confirmed in terms of the supporting requirements of short-term forecasting.
As to spatial aspect, hydrologic environment of underwater profiles can be monitored by expendable probes in scheduled skyways in advance, while monitoring hydrologic constituents of limited 3D space in important areas can be implemented by deploy mixed series of expendable probes composed of three types which are used to detect sea surface, air and profiles undersea respectively.
-
2.
Meet the request of security and privacy in acquiring information.
The privacy and security in acquiring information in battlefield environment will come true if the new system adopts MBC manner. It is hard to measure the directions effectively, to intercept and to disturb thanks to that meteor burst works in instantaneous, quick, random and intermittent manner and the communication covers quite a small extent. Meanwhile, its survivability is nice for not depend on ionosphere reflection and seldom affected by macula, polar lid interruption and aurora phenomenon.
-
3.
Meet the request of quick arrival
The key point to detect extremely faraway region in the new system is the UAVs. Two principals have to be followed in selecting the UAVs. First, it had better to select existing and casehardened UAVs and their auxiliary systems including launch and control systems have advanced. Second, it had better to minimize changes in design for the selected UAVs and their auxiliary systems.
5 Detection Technology of Marine Scene Profile
Compared with the development of UAV and MBC, the development of field detection technology lags behind. The inner section of the probe unit is the final carrier of the marine hydrological elements in the new system, which can be loaded with different sensors to measure various hydrological factors. The utility model is characterized in that each hydrological element sensor is encapsulated in a conical probe, and the hydrological information of each water depth is measured directly in the process of the sinking of the probe. In order to improve the accuracy of the measurement, the probe should be calibrated before use, and the calibration coefficient should be stored in the probe itself.
At present, two methods have been used to measure the depth of sea profile. The Argo buoy, the delivery of various type, towed CTD using piezo resistive sensor [17], obtained by the relationship between the depth and the pressure of the sea. Sounding method of all kinds of aviation, ships and submarines with XBT and XCP were determined by mathematical modeling, namely the use of motion detector after the launch of the probe, the corresponding relationship between the sinking time and distance probe, probe is also sinking curve are calculated, finally the water depth measurement probe at the moment [18].
In the process of numerical calculation method are used to calculate the experience or experimental probe sinking resistance force before the resistance coefficient are obtained by fitting the experimental has great limitations, as long as the shape of the probe is changed, it will be necessary to determine the resistance coefficient of the new experiment. Because of the different probe types, the shape, size and weight of the probe are different, and the sinking motion law is different. Moreover, in most cases, the flow near the probe is in a turbulent state during the sinking process. It is not suitable to use the experimental or empirical methods to determine the motion equation and the drag coefficient of the different probes.
The probe design is a complicated system engineering; it relates to the structural design, material science, electronic technology and fluid mechanics and other disciplines, several disciplines highly correlated, mutual coupling, process design process is iterative, multi-stage, gradually close to the optimal. In this chapter, the multidisciplinary design optimization (MDO) method is used to solve the design problem of the probe. The main idea is based on the conceptual model design, using a variety of effective optimization strategy, to optimize system and various disciplines, put forward the improvement and innovation of design according to the optimization results, after repeated optimization and improvement, finally get the optimal design scheme.
Optimization design of probe needs to be validated by larger depth experiments on this basis can further improve. CFD numerical simulation method to establish the need to adjust by high precision experiment. Research on motion characteristics analysis probe experiment method, the stress in the water in the sink when the probe including gravity, buoyancy and resistance, do not release the coil when gravity and buoyancy remains unchanged, but the moving speed and the related resistance probe. When the probe is released from the water free after the first acceleration, with the increase of resistance when sinking speed, gravity, buoyancy and resistance balance, will reach the speed limit, after this speed sinking, so the need to be able to complete the entire process to record acceleration, velocity curve and acceleration for limit sinking probe.
The head of the new system probe is a tangent pointed arch, and Newton’s second law can describe the motion law of the probe in the ideal inviscid incompressible fluid. Because the probe is an axisymmetric body, only the vertical motion considered in the calculation, and the main contents include the calculation of the governing equations, the buoyancy resistance and the motion limit velocity.
The motion equation and momentum equation of the new probe sinking motion are as follows:
where M is the probe quality; m is the additional quality of probe, which is a constant while the probe is sinking; z is the sinking depth of probe; v is sinking speed of probe; g is the acceleration of gravity probe; F f is the buoyancy; D is the resistance force.
The new probe is floating freely after released from the surface, so the initial conditions are:
According to the design requirement of the new system, complete - shape and structure design of the key components of field profile probe detection unit, the sinking resistance coefficient of numerical calculation method and 3D simulation method, and to validate and improve the design of scientific experiment. The research mainly includes four aspects:
In view of many constraints proposed the new system function and structure in the section of the probe, the appearance and structure design, including: the main components of the material selection; structural layout optimization; universality, compatibility design; modular design;
Including the research methods, numerical calculation of hydrodynamic characteristics and resistance coefficient of the probe sinking motion: motion control equation, buoyancy, resistance, calculation of limit movement speed, sinking resistance coefficient with Reynolds number in the process of the relationship;
Study on probe sinking process 3D simulation method, including recording motion sensor in the sinking process parameter and change the flow field around the situation, location, speed, acceleration, force, torque and drag coefficient and the flow field around the probe motion parameters of laminar flow, turbulent flow, pressure field and velocity field change etc.;
The mathematical model of the probe sinking is established, and the sinking of the probe completed.
6 Conclusion
It is foreseeable that, UAVs used for marine monitoring would carry several kinds of expendable probes to implement field survey of marine meteorological constituents in the near future, and the sea temperature, sea color, tides, waves and so on. In virtue of the excellent mobile platforms provided by the new system, not only the profiles of temperature, salinity, depth, speed of sound and velocity of current and suchlike, but also such constituents on sea level as wind velocity, current velocity and transparency can be measured. Moreover, marine meteorological detectors like mini-type rockets could be carried to observe the area above sea level open sea. The new system possesses a huge potential when applied to the paroxysmal and hazardous marine dynamic processes such as earthquakes, tsunamis, storm surges and internal solitary waves arose by typhoons in field detecting.
References
Yongming, J. (2012). Study on the strategy of the ocean security of China. World Outlook, 4, 1–12.
National Ocean Technology Center. (2002). 2001–2002 Development of marine technology. Beijing: Ocean Publishing House.
Sany, S. B. T., Hashim, R., Rezayi, M., et al. (2014). A review of strategies to monitor water and sediment quality for a sustainability assessment of marine environment. Environmental Science and Pollution Research, 21(2), 813–833.
Xu, G., Shen, W., & Wang, X. (2014). Applications of wireless sensor networks in marine environment monitoring: A survey. Sensors, 14(9), 16932–16954.
Reul, N., Fournier, S., Boutin, J., et al. (2014). Sea surface salinity observations from space with the SMOS satellite: A new means to monitor the marine branch of the water cycle. Surveys in Geophysics, 35(3), 681–722.
Ren, L., Hackert, E., Arkin, P., et al. (2014). Estimating the global oceanic net freshwater flux from Argo and comparing it with satellite-based freshwater flux products. Journal of Geophysical Research: Oceans, 119(11), 7869–7881.
Montenbruck, O., Hauschild, A., Steigenberger, P., et al. (2013). Initial assessment of the COMPASS/BeiDou-2 regional navigation satellite system. GPS Solutions, 17(2), 211–222.
Sonoda, T., Nassiraei, A. A. F., Godler, I., et al. (2017). Development of a hydraulic underwater manipulator for deep-sea survey AUV. Image, 501, 10.
Song, Y., Xiaolei, W., Yannian, Z., Yunsheng, Z., & Junjie, Z. (2015). Study and design on mobile offshore hydrologic environment monitoring system. Chinese Journal of Scientific Instrument, 34(4), 578–581.
Sraj, I., Iskandarani, M., Srinivasan, A., et al. (2013). Bayesian inference of drag parameters using axbt data from typhoon fanapi. Monthly Weather Review, 141(7), 2347–2367.
Sakai, S., Matsuyama, M., Okuda, K., & et al. (2015). A basic study of utilization of DBF ocean radar with VHF BAND for tsunami detection in open sea. In Geoscience and remote sensing symposium (IGARSS), 2015 IEEE international. IEEE, pp. 4924–4927.
Qian Hongbao, X., Wen, Z. J., & Peng, H. (2015). Review and deliberation on the development of marine monitoring high technology in China. Journal of Ocean Technology, 34(3), 208–214.
Zhou, Y. N., Ye, S., Zheng, J. J., & Wang, X. L. (2008). Discussion on transmitting oceanographic data by meteor burst communication system. Chinese Journal of Scientific Instrument, 29(8), 486–489.
Kobayashi, T., & Shinya, M. (2005). Importance of reference dataset improvements for Argo delayed-mode quality control. Journal of Oceanography, 61, 995–1009.
Marnela, M., Rudels, B., et al. (2012). Recirculation in the Fram Strait and transports of water in and north of the Fram Strait derived from CTD data. Ocean Science, 9, 3127–3190.
Gouretski, V. (2012). Using GEBCO digital bathymetry to infer depth biases in the XBT data. Deep Sea Research Part I: Oceanographic Research Papers, 62, 40–52.
Schöne, T., Zech, C., Unger-Shayesteh, K., et al. (2013). A new permanent multi-parameter monitoring network in Central Asian high mountains—From measurements to data bases. Geoscientific Instrumentation, Methods and Data Systems, 2(1), 97–111.
Yanming, J., & Shixiang, T. (2001). Key points study of airborne expendable CTD probe. Ocean Technology, 20(4), 48–53.
Acknowledgements
This work is supported by the Natural Science for Youth Foundation (NSYF) (Nos. 41406107, 41706109).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Chen, Z., Liu, F., Wang, X. et al. Research of a New Open Sea Contingency Monitoring System. Wireless Pers Commun 102, 817–829 (2018). https://doi.org/10.1007/s11277-017-5106-2
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11277-017-5106-2