
Abstract
Unmanned aerial vehicles (UAV) have been widely used in various fields because of their high mobility and portability. At the same time, due to the rapid development of artificial intelligence, people’s demand for computing is increasing, and the computing power of existing mobile computing devices cannot fully meet the users’ needs for network quality. Therefore, people have proposed mobile edge computing technology (MEC), but MEC still has some shortcomings, such as poor dynamic performance. Therefore, combining the two will have better results. Due to the limited battery capacity of UAVs, the continuity of the UAV Communication Network is affected. Therefore, effectively using the limited spectrum resources, reducing the energy consumption of UAVs and meeting the users’ quality of service needs have become urgent problems to be solved. Under the framework of UAV-assisted MEC, this paper focuses on the downlink communication energy efficiency of a single UAV Communication Network, arranges and analyzes the methods and technologies found in different research, reviews specific UAV practical applications, provides a relevant discussion and method analysis for the problems existing in the UAV Communication Network, and presents its existing problems and our future research direction.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
With the development of fifth-generation mobile communication technology and the promotion of the Internet of Things, an increasing number of new mobile applications are gradually entering people’s lives, such as unmanned driving, intelligent navigation, and face recognition [1, 2]. While the new applications have a substantial impact on public safety, they also cause traffic congestion problems [3]. Mobile edge computing (MEC) is a technical solution to solve the pressure of network data traffic. Its main feature is to transfer the computing function from the device to the edge of the network to complete the computing intensive and delay sensitive applications on resource constrained mobile devices [4]. MEC technology has also attracted the attention of academia.
In MEC, there are heterogeneous network resource allocation and computing task offloading; hence, joint optimization of such problems has become the researchers’ main research direction [5,6,7]. For specific scenarios with a large number of computationally intensive tasks, it is also important to study the relevant energy-efficient offload models, which will enable the optimization of system energy efficiency [8,9,10,11,12].
As an important strategic means to promote the integration of sky and ground information networks, UAV-assisted wireless communication has great application prospects. Compared with traditional ground communication service equipment, UAV air communication platforms play the following important roles: (1) UAV air communication platforms have the advantages of low deployment costs and fast speed, which makes them especially suitable for auxiliary emergency communication systems; (2) UAVs can adjust their position in a timely manner due to the changes in the environment and user requirements to realize on-demand communication; and 3) UAVs are not limited by time and terrain and can provide internet services for remote areas having insufficient ground wireless coverage or lacking any network coverage.
UAV-assisted wireless communication is a promising research direction. For scenarios with limited infrastructure, traditional ground moving edge calculations cannot meet their needs. As a potential technology for addressing challenges, this technology has more reliable line-of-sight links and controllable mobility management [13,14,15] than infrastructure-based mobile edge computing. Specifically, the authors in [16] studied a relay system based on UAVs, which included multiple UAVs participating in the air relay system, which uses concave-convex planning to optimize task assignment and UAV trajectory together to minimize the sum of the maximum user latencies [17, 18].
Although there are many studies on single UAV ancillary communication, these studies assume that the business requests of ground users are the same or that network resources (bandwidth, energy) are infinite [19, 20]. This results in excessive UAV energy consumption, unreasonable resource allocation, and unmet user-differentiated business needs. Therefore, UAV 3D tracks and bandwidth resource allocation need to be jointly designed based on the type of business requested by the user. In addition, most of the existing research focuses only on maximizing throughput or minimizing energy consumption. Few studies combine throughput with energy consumption. Therefore, studying the energy efficiency of a single UAV communication network can improve the energy efficiency of a single UAV communication network and meet the different business needs of users, which has significant practical importance.
1.1 What is MEC?
Mobile edge computing (MEC) is a technology that has been combined with 5G architecture in the past few years. MEC can be regarded as a micro cloud service platform that can complete the functions of computing, storage and communication by approaching the user end [21, 22]. Therefore, some computing tasks with more stringent requirements for bandwidth and delay can be processed on the edge server.
In MEC, terminal devices can enhance the computing power by using the powerful resources of remote central clouds through the operator’s core network and internet [23,24,25]. However, the vast resources and services make it possible for some new applications to run on equipment terminals with limited computing power. Nevertheless, in terms of network topology, the cloud computing center is far from the device end. Mobile cloud computing (MCC) not only requires additional mobile wireless network link resources but also causes a large additional delay [26, 27]. It cannot meet the requirements of delay sensitive applications, location awareness and mobile support.
To solve the above requirements, the sinking edge big data processing idea arose, which is used to process the massive data generated by the edge terminal equipment. In 2014, MEC was first defined by the European Telecommunications Standardization Association (ETSA) as a new platform to provide information technology services and cloud computing big data services for mobile terminal devices within its scope through a wireless access network [28]. MEC advocates using the available resources in the edge network to make cloud services and resources closer to mobile terminals. However, MEC does not replace the existing cloud computing model. It integrates and complements the existing centralized cloud computing big data processing with a cloud computing model as the core. It is applied to big data processing at the edge of the network, which is a better solution for the above problems in the 5G era. Therefore, MEC is regarded as the key technology and architectural concept of 5G [29].

An example of dynamic service placement when a user roams throughout the network in MEC
Figure 1 illustrates an instance of dynamic service placement when users roam the network in MEC. The model is mainly composed of three parts: a cloud computing center, terminal equipment and an edge platform. The data in the cloud computing center come from the database and some edge terminal devices. These edge terminal devices are both data producers and data consumers, but due to their limited computing power and storage capacity, they need to rely on powerful storage and computing units for data storage, processing, caching and management. The edge platform can cache, calculate and distribute data. When consuming data, it can obtain data at the edge platform near the terminal, which can reduce the network burden and delay. After processing the relevant information, the computing resources can be allocated to other users and base stations so that they can use the relevant resources more conveniently and easily (Fig. 2).
1.2 What is a UAV-assisted wireless network and computing system?
A UAV is also known as unmanned aircraft or remotely controlled aircraft [30]. Due to the high mobility, flexibility and low cost of UAVs, their early application in military operations was to reduce pilots’ casualties as much as possible. With the continuous updating of science and technology, the production and application cost of UAVs is decreasing. Therefore, UAVs have been widely used in civil, military and commercial settings [31]. At present, UAVs can be roughly divided into two categories: fixed wing UAVs and rotor UAVs.

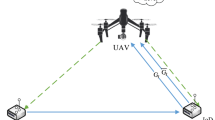
The MEC system assisted by a UAV
In various scenarios applicable to UAVs, UAV-assisted wireless communication (UAVs provide communication services for users without basic communication facilities) is a very promising research topic. For example, communication services in remote mountainous areas or where communication infrastructure is damaged can be provided [32]. In addition to UAVs, there are other devices that can provide wireless transmission services, such as airships or communication balloons. Compared with high-altitude satellite communication systems, low-altitude UAV auxiliary communication systems have the advantage of a simple system architecture [33]. On the one hand, for some scenarios with limited planning time, a UAV-aided communication system is a common scheme to reduce cost and realize quickly, which is mainly determined by its portability and easy deployment. On the other hand, when a UAV operates at low altitude, it can link the transmitting end with the receiving end for short-range sight distance to improve the communication quality to a greater extent [34]. Second, people can dynamically adjust the flight trajectory and the flight state of UAVs according to the actual application scenario to provide more data transmission and ensure the minimization of communication delay [35]. In conclusion, UAVs have strong advantages in wireless communication, which makes them a promising direction for auxiliary wireless communication. UAV-assisted wireless communication usually has the following four case studies.
1) UAV-assisted wireless coverage. As an air mobile base station, UAVs assist the ground infrastructure in providing users with wireless transmission services [9]. There are two typical cases. First, fast and effective communication services are provided in the case of natural disasters or when communication signals in remote mountainous areas cannot be covered. Second, high-quality and low delay communication services are provided in hot areas (such as live broadcasts of events). The research of these two usage scenarios is of great practical value. 2) UAV-assisted relay. UAVs provide reliable, safe and efficient wireless communication connections for two or more remote users. For example, UAVs can provide secure wireless connections for the front line and the command center in military operations or can provide data transmission services for long-distance base stations. 3) UAV-assisted security. Specifically, in terms of the performance and resource management of UAV physical layer security, because wireless communication is exposed to the air and has broadcast characteristics, UAV communication is vulnerable to malicious attacks or eavesdropping. To avoid eavesdropping attacks on the system and ensure the safe communication of the system, the general system adopts encryption. In terms of performance analysis and optimization of UAV covert communication, that covert communication, or low probability detection (LPD) communication, aims to conceal the existence of wireless transmission. It also aims to transmit covert information by using normal behavior to greatly reduce the risk of attack in the transmission process of information to ensure strong security in wireless networks. This adds more levels to the research of UAV communication. 4) UAV-assisted data acquisition or information dissemination. UAVs are widely used in distributed wireless transmission systems requiring low delay because of their high mobility and flexibility.
1.3 Why do we perform resource management in UAV-assisted MEC?
Due to the many advantages of UAVs in communication, such as on-demand deployment, rapid deployment, line of sight communication, etc., the MEC service assisted by UAVs has great prospects and is of enormous help to resource management in UAV-assisted MEC computing. In this regard, there are many related studies with different emphases. In [36], for a UAV-assisted MEC system, a two-stage alternating optimization method was used to obtain the flight trajectory and the allocation of communication and computing resources to maximize energy efficiency. In [37], the network trust node and cooperative data communication are studied, which can help the network mutual trust and data communication between UAVs. The problem of computing rate maximization in local and binary flooding modes is solved by an alternating algorithm. In another study [38], by studying the dynamic working phenomenon of service workflow in cloud edge computing, we can find a series of problems that may occur in the actual operation of UAVs and the corresponding solutions. In addition, [39] suggested that multiple UAVs use fixed flight trajectories as edge servers to provide services for UE in a certain range, and the energy consumption of UE is minimized by using reinforcement learning to solve mixed integer nonlinear programming.
UAV-assisted wireless communication can give full play to the respective advantages of space-based and ground-based communication systems, realize complementary functions, and provide real-time, reliable and efficient communication services for various applications [40]. In the early stage, UAVs were mainly used in military applications to detect and collect enemy intelligence to reduce casualties [41]. In the last few years, with the continuous progress of relevant science and technology, the development cost of UAVs has been continuously reduced, the volume has been continuously
increased , and the function has been continuously improved. The application of small UAVs in civil and public safety has increased rapidly. The application scenarios include environmental monitoring, logistics management, emergency communication, aerial photography, wire patrol inspection, geological exploration, etc. [42]. In [43], the authors proposed the combination of UAV and MEC, discussed its application scenario, safety performance, and specific unloading decision-making methods, described the existing problems, and made the corresponding proposals. An air-ground integrated mobile edge network (AGMEN) using a UAV-assisted MEC network was proposed [44]. In [45], the authors proposed the development of a UAV-MEC (U-MEC) network. It included a brief introduction to UAV and MEC technology.
In addition, [43] discusses the combination and application scenarios of UAVs and MEC and proposes the characteristics and performance comparison of different unloading technologies. In [44], the authors introduced the characteristics and components of UAVs. Then, from the communication perspective, computing and caching, AGMEN’s application, key challenges and current research techniques are reviewed. In [45], the authors introduced the U-MEC system, compared it with the ground MEC network, explained its principle, and proposed optimization problems and solutions.
This paper emphasizes the practical problems and corresponding solutions of UAV-assisted MEC systems in different applications and proposes a series of energy efficiency optimization methods for network requirements and quality of user experience to ultimately guarantee the business needs of users. The common point of this paper and reference [43] is that they study the optimization of MEC systems. The common point with [44, 45] is to combine optimization of MEC systems with UAV systems to explore better solutions.

The communication system architecture of UAV edge computing
Figure 3 shows the communication system architecture of UAV edge computing. Compared with traditional ground communication service equipment, the UAV air communication platform has the following advantages. 1) The UAV air communication platform has the advantages of low deployment cost and fast speed, which makes it particularly suitable for assisting the emergency communication system. For example, when the communication infrastructure in the disaster area is destroyed and results in the paralysis of the communication network and the communication base station is overloaded due to the sudden increase in communication demand in temporary traffic hot spots, service traffic is unloaded, and data collection and distribution of large-scale Internet of Things (IoT) equipment occur in industrial parks or communities. 2) The flexibility and controllability of UAV movement bring new degrees of design freedom. For example, UAVs can adjust their position in a timely manner according to changes in the environment and user requirements to realize on-demand communication. 3) In remote areas and disaster areas, the problem of insufficient or ineffective infrastructure can be extended and covered by UAVs. In densely populated and crowded places, UAVs can enhance wireless coverage and increase user capacity.
Combined with the advantages of UAVs in air communication platforms discussed above, it can be seen that UAVs play an increasingly important role in modern communication systems, and the application and research of UAV-based MEC has attracted increasing attention. A UAV can dynamically provide data transmission services, and MEC can use idle devices to unload tasks for auxiliary computing and has achieved low delay and high data transmission. Obviously, for a large amount of data that is difficult to calculate, the UAV can unload it to idle devices for auxiliary calculation and complete the data calculation task in time. This has notable practical importance for military, civil and commercial scenarios with high computational requirements. Thus, new research in this field is necessary.
In Table 1, we summarize the related research of mobile edge computing and UAV-assisted MEC.
1.4 Contributions of the paper
The following sentences summarize the key contributions of this paper to the proposed research topics and challenges. In short, the objectives of this paper are:
-
(1)
providing valuable information about the role of data distribution and data transmission in resource management in UAV-assisted MEC;
-
(2)
exploring the main challenges of resource management in UAV-assisted MEC and present guidelines to face the current challenges; and
-
(3)
summarizing the key areas of data distribution and data transmission in resource management in a UAV-assisted MEC.
1.5 Organization of the paper
The first section introduces the background knowledge of MEC and UAV assistance. The second section describes the specific examples of UAVs assisting MECs in resource management. The third section highlights the specific research direction that needs to be discussed in this paper. The fourth section is a preliminary summary of the above. The fifth section presents the most important research challenge, which is discussed in the section about open issues. The last section presents the conclusions of the paper.
2 Resource management in UAV-assisted MEC: motivating application use cases
Based on the business scenarios characteristics, UAV-assisted wireless communication scenarios can be roughly divided into three categories: emergency communication, relay communication, and information collection and distribution.
2.1 Emergency communication scenarios
In emergency communication scenarios, the sudden increase in the demand for communication services results in overloading of ground base stations (such as large sports match sites, large concert sites, etc.) or failure of ground base stations caused by natural disasters (such as earthquakes and floods). To ensure the communication needs of temporary traffic hot spots or disaster-stricken areas, wireless coverage can be provided by deploying UAV base stations over the target area to meet the communication needs of ground users [46].
2.2 UAV as flying MEC server-assisted MEC networks
In the scenario where the communication link between the ground source node and the destination node is seriously blocked and there is no direct communication link, a UAV base station is deployed to provide relay communication coverage service to ensure efficient information exchange between the source node and the destination node [47].
2.3 Data collection, information collection and distribution
In remote areas with insufficient or no network coverage, the battery capacity of the sensor is limited, and long-distance communication takes a large amount of energy, which seriously affects the available access to the sensor. Deploying a UAV as an air access point to collect data from the ground sensor or to distribute information to the sensor can reduce the energy consumption of the sensor by [48]. We increase the probability of successful data transmission. Figure 4 summarizes three typical scenarios for UAV-assisted wireless communication.

Typical application scenarios of UAV auxiliary wireless communication. a UAV auxiliary emergency communication, b UAV auxiliary relay communication, and c UAV auxiliary information collection and distribution
3 Research directions and state-of-the art
3.1 Single UAV-assisted wireless networks
The UAV carries a communication base station aloft to provide communication services to ground users. For the limited coverage and energy of a single UAV Communication Network, we can jointly optimize the mobile trajectory, transmission power, system bandwidth resource allocation and user communication scheduling to achieve efficient communication of a single UAV.
In the single UAV-assisted wireless communication scenario, researchers maximize the transmission rate and service fairness, minimize the UAV flight time and provide access for the maximum number of users by optimizing the UAV movement trajectory [49,50,51,52,53,54,55,56,57,58,59,60,61], 3D deployment [62, 63], power allocation and bandwidth resource allocation [64, 65].
3.1.1 Trajectory optimization
Due to the interaction between the UAV flight trajectory and bandwidth resource allocation, the authors in [66] studied the service fairness of a UAV communication system based on orthogonal and nonorthogonal multiple access technology and proposed a joint optimization algorithm for UAV movement trajectory and resource allocation. Considering that UAVs flying at fixed altitudes may have difficulty meeting the service needs of all of the users along with limited bandwidth resources, the authors in [67] proposed a UAV 3D flight trajectory design method to maximize the minimum throughput and provide user service fairness. This study reveals the positive correlation between UAV flight altitude and data transmission rate. Although the scheme can ensure the fairness of users receiving services, it does not consider the differences of users’ business needs, which will lead to unreasonable resource allocation or waste of resources. Considering the widespread downlink interference in cellular networks, the authors in [68] proposed the 3D antenna radiation mode and UAV 3D movement trajectory under the wireless backhaul constraints optimization problem. Focusing on the poor quality of service of edge users in heterogeneous cellular networks, the authors in [69] proposed that the UAV mobile air base station offloads the edge service traffic of the ground cellular network to improve the average bandwidth utilization of heterogeneous cellular networks.
3.1.2 Resource allocation
The authors in [70] proposed using a solar UAV to assist wireless communication, comprehensively considering five constraints: UAV moving trajectory, bandwidth resources, UAV transmitting power allocation, UAV receiving energy efficiency and UAV total energy consumption, and designed an offline resource allocation algorithm and online resource allocation algorithm according to channel causality attributes [71]. Moreover, considering the service-specific delay requirements in the scenario, the authors in [72] proposed studying the UAV-assisted wireless communication method based on orthogonal frequency division multiplexing technology and proposed a joint optimization scheme to maximize the minimum throughput and meet the delay requirements of all applications. In [73], the authors proposed an efficient trajectory optimization scheme to minimize UAV flight time and ensure that all users can successfully receive and recover file content. In [74], the authors proposed a novel optimization algorithm, which can significantly improve the system performance and provide the best parameter selection for UAV system design. In [75], the authors studied the performance analysis of a new type of covert communication system. The system uses friendly UAV jammers to protect covert transmission and then realizes the further rational allocation of resources.
3.1.3 Energy efficiency
In the scenario where the rotor UAV base station is used to serve multiple ground users, the authors in [76] proposed the minimization of energy consumption of the UAV Communication Network in mobile hover communication mode and mobile communication parallel mode, respectively. In mobile hover communication mode, the author solved the optimization problem by using a one-dimensional search algorithm and obtained the UAV energy-saving flight trajectory. In mobile communication parallel mode, the author discretized the UAV movement trajectory, and the SCA algorithm and CVX toolkit were used to solve the nonconvex optimization problem to obtain the UAV energy-saving flight trajectory. In a UAV-assisted D2D (Device-to-Device, D2D) communication network, the authors in [77] proposed a joint optimization scheme for D2D transmission power, UAV hover height, and bandwidth resource allocation to maximize the D2D downlink transmission rate. In a UAV relay communication network with D2D communication, the authors in [78] proposed an efficient spectrum sharing method suitable for UAV relay communication and ground D2D communication. The optimal UAV trajectory and transmission power are obtained by subtracting two convex functions and an alternating optimization algorithm to maximize system throughput, which satisfies the D2D communication quality of service requirements. In [79], the authors studied the use of a single solar UAV to provide communication services for multiple downlink users and constructed a joint optimization problem for UAV 3D positioning, power and bandwidth resource allocation with total throughput.
3.2 Single UAV-assisted MEC networks
UAVs carry computing devices as airborne MEC servers to relieve communication and computing pressure on the ground edge computing network. In particular, in areas where wireless coverage on the ground is insufficient or where there is no network coverage, terminal devices with limited battery capacity have difficulty successfully unloading computing tasks to remote edge servers, and terminal devices consume considerable energy for long-distance communication. Deploying UAV edge computing networks can reduce the energy consumption of terminal devices and improve the computing power of terminal devices. We use the UAV air MEC system auxiliary terminal equipment to complete high-density computing tasks.
3.2.1 Trajectory optimization
In the Internet of Things (IoT) scenario, the authors in [80] proposed the energy efficiency of an MEC network based on a UAV wireless power supply. To improve the energy efficiency of the edge computing network, a workflow model based on the new time-division-multiple-access (time division-multiple-access) technology was proposed, and the UAV was allowed to process the received computing tasks in real time. The authors in [81] considered that the system resource management problem was modeled as a random Stelberg game model under the condition that different base stations were managed by different operators and did not communicate with each other. The decision-making problem was designed for the base station and the nodes, specifically to reasonably decide when to unload the computing task to the corresponding MEC server and base station and coordinate the resource allocation between each MEC server. A novel framework for the reinforcement learning algorithm, [82], the UAV and ground static access point cooperate to assist edge computing. This occurs to solve the problem that the computing and communication capabilities of the UAV and ground access point differ greatly, and the authors in [83] proposed a joint design of communication and calculation to minimize the energy consumption of the UAV-assisted MEC network and ensure the minimum computing bits offload requirements of all users.
3.2.2 Resource allocation
In [84], the authors considered both communication and computing latency requirements and studied joint optimization task offload decisions, resource allocation MEC hierarchies, and UAV trajectories to minimize the total energy consumption of IoT devices and UAVs. In an application scenario where mobile users are rapidly increasing or facilities are sparsely deployed, the authors in [85] studied UAV and Edge Cloud work together to assist IoT devices in performing computing tasks by jointly optimizing UAV location deployment, computing and communication resource allocation, and task planning to minimize the weighted sum of the total offload delay and UAV energy consumption for IoT devices. In [86], the authors proposed a joint optimization scheme for the UAV trajectory, user scheduling, computing resource allocation, computing task partitioning and radio resource allocation with energy efficiency as the goal, considering the energy consumption brought by local computing tasks, computing task unloading and UAV baseband signal processing of ground terminal devices. Aiming at the security problem of UAV-assisted edge computing, the authors in [14] proposed a scheme for a UAV MEC system to offload security computing to maximize the efficiency of the system. As a result of the game relationship between UAV flight speed, energy consumption and task completion time, the authors in [87] proposed a joint optimization of the UAV trajectory, task completion time, calculation offload and resource allocation to minimize energy consumption and task completion time of edge computing systems. Multiaccess edge computing is often considered to be an effective solution to improve the computing power of mobile devices with limited battery capacity. Researchers studied an energy-saving UAV-assisted MEC system framework based on nonorthogonal multiple access (NOMA) technology and used NOMA technology to reduce UAV energy consumption [88]. Since the computational energy consumption increases cubically with the increase in computational tasks, an inappropriate allocation of computational tasks may lead to an explosive increase in computational energy consumption, which in turn may result in computational tasks unloaded to UAVs not being completed in time. For this reason, the authors in [89] proposed the UAV trajectory, computing task allocation and communication resource allocation to maximize the energy efficiency of edge computing systems.
3.2.3 Energy efficiency
The UAV operates a computing device as an aviation MEC server that can relieve communication and computing pressure on computing networks at the edges on the ground. By deploying a certain number of drones, the scenarios of signal complexity, network jams and the emergency situation can be helped, and with the cooperation of drones, the MEC server workload can be further alleviated, thus achieving faster computation speed and resource allocation rationalization. We use UAV airborne MEC system auxiliary terminal equipment to complete high-density computing tasks. To satisfy the quality of service of any user, the authors in [90] proposed establishing a Markov decision model for the UAV trajectory and compute offload scheduling and proposed a motion selection decision method based on a deep learning algorithm of quality of service. In the scenario where UAV and ground terminal devices work together to assist in computing the offloading, the authors in [91] proposed a joint optimization framework for computing the offloading scheduling, CPU control and UAV trajectory, which minimizes the total energy consumption of the UAV-based wireless charging MEC network.
The review of the above research found that the current research work on UAV-assisted edge computing networks assumes the same type of business terminal, and UAVs only provide computing services. This may lead to a deterioration in the quality of service accepted by other communication users in some applications (for example, the coexistence of communication users and computing users in traffic hot spots). In addition, most of the existing studies rarely combine energy consumption with throughput. Further consideration needs to be given to the single UAV-assisted MEC network energy efficiency.
3.3 Multi-UAV assisted wireless networks
3.3.1 Trajectory optimization
Compared with a single UAV communication network, deploying a multiple UAV communication network can improve the quality of service and extend the service time of the UAV communication network. In [92], the authors proposed the throughput maximization problem of a UAV-assisted wireless communication system based on time division multiple access technology and proposed a joint optimization scheme with minimum throughput maximization constrained by the UAV trajectory, user communication scheduling and UAV transmission power control. To reduce the complexity of optimization problem solving, the authors in [93] resolved the problems using the BCD algorithm.
To solve the problem of service skewing in a multi-UAV-based communication network, the authors in [94] proposed a method of joint optimization of resource allocation and UAV base station deployment to achieve service fairness.
3.3.2 Energy efficiency
To minimize the maximum deployment delay of UAVs and the total deployment delay of all UAVs, the authors in [95] proposed the UAV flight trajectory to minimize the coverage delay and the energy consumption of UAVs due to the different types of UAV flight speeds and deployment cycles. Because UAV clusters have the advantage of wide coverage, the authors in [96] proposed the seamless coverage of using UAV clusters with ground cells. In [97], the authors proposed an on-demand deployment algorithm for UAV airborne networks. In the scenario where a UAV communication network coexists with a terrestrial cellular network, as a result of the negative impact of UAV communication network deployment density on the service quality of terrestrial cellular networks, the authors in [98] proposed improving the spectrum utilization of heterogeneous networks by optimizing UAV communication network deployment density to ensure the service quality of terrestrial cellular users. To solve the interference problem in multi-UAV auxiliary communication, the authors in [99] proposed the spectral efficiency of the communication network by jointly optimizing the UAV trajectory and the transmission power. To overcome the limitation of UAV endurance, the authors in [100] proposed a method of joint use of user active cache to communicate with a UAV base station switch to extend UAV-based communication network service time. Considering the game relationship between the energy consumption of UAVs and the coverage efficiency of communication networks, researchers have studied the energy efficiency optimization algorithm for multi-UAV wireless communication networks based on deep reinforcement learning from the perspective of energy consumption and fair coverage [101, 102]. To enable in-vehicle users to enjoy an immersive driving experience, the authors in [103] proposed a UAV cluster and in-vehicle network collaborative auxiliary content push and cache algorithm. In a heterogeneous network where UAV airborne base stations coexist with ground macro base stations, the authors in [104] considered the trade-off between the communication energy consumption of UAVs and the throughput of the communication system, proposed a UAV hover location optimization scheme aimed at maximizing energy efficiency, and designed a two-layer optimization framework based on the Lagrange multiplier method and the subgradient optimization algorithm. Given the loss of airborne channels and the limited airborne power of UAVs, how can network life be extended while ensuring successful data transmission? To answer this question, the authors in [105] proposed a multi-UAV energy-saving cooperative relay communication scheme. In [106], the authors proposed the energy efficiency optimization of a wireless charging-assisted UAV communication network and proposed a new group intelligence-aware energy efficiency optimization algorithm for UAVs based on a deep learning framework. In [107], the authors proposed the use of multi-UAV-assisted relay communication to achieve high throughput and long-distance communication. The authors in [108] designed an advanced TD-LTE radio resource optimization framework to address the problem that the existing frame configuration method limits the use of time division-long term evolution (TD-LTE) technology in UAV communication networks.
3.3.3 Resource allocation
In [109], the authors designed a joint optimization model of resource allocation and user association for a UAV base station and used convex optimization theory to solve the problem of resource allocation optimization, aiming at the resource competition caused by shared spectrum resources of forward and return links in the process of providing wireless services. In [110], the authors proposed the efficient dynamic deployment method of a communication network based on a multi-UAV concept. To enable ground devices to send data to UAVs stably with minimum transmission power, the author designed a joint optimization framework for UAV 3D dynamic deployment, terminal device communication association and uplink power control.
In addition, due to the limited load of UAVs, the capacity of computing devices that the UAV can carry is limited, which results in limited computing power for the UAV. Therefore, using a single UAV as a computing service device may result in unacceptable computing delays. Currently, many researchers have focused on multi-UAV-assisted MEC. Specifically, the authors in [111] calculated a hierarchical game theory model based on access selection and resource allocation to balance the performance and service cost of the IoT system. Considering the conflict of the resource competition among MEC systems based on multiple UAVs, the authors studied how to allocate bandwidth resources reasonably to meet the computing latency requirements of all users during the offloading of multiple UAVs. When the residual energy of the ground terminal device was very low and the computing task could not be successfully unloaded to the UAV, the authors in [112] proposed the multi-UAV MEC network architecture with wireless charging in the application of the Internet of Things and proposed a joint optimization scheme for computing unload and resource allocation. In addition, the author converts the above collaborative computing offloading and resource allocation optimization problems into semi-Markovian decision-making processes and proposes a deep reinforcement learning-based computing offloading method for UAV centralized MEC systems and UAV distributed MEC systems. In the vehicle networking application scenario, the authors in [113] proposed a differential evolution algorithm to study resource allocation of base-multiple UAV-assisted edge computing systems to achieve the goal of a minimum number of UAVs deployed and high system stability.
Although much work has been done on multi-UAV ancillary communication and computing, most of the research work only considers that UAVs provide a single type of network service (e.g., multimedia communication service, computing offload), without taking into account the differences in the terminal business requirements and UAV group execution tasks. In addition, little research has been done to consider the throughput of the communication system in combination with the UAV energy consumption. Therefore, it is of great importance to continue to study the throughput and energy consumption trade-off of multi-UAV communication networks to improve the energy efficiency of communication networks and ensure the quality of service for users.
4 Discussion
In this section, we discuss the research status of resource management in a UAV-assisted MEC.
First, facing the diversification and dynamic changes of users’ business requests, the allocation of network bandwidth resources needs to be reasonably designed according to users’ business needs, especially when the business content requested by users changes (for example, the business content changes from SMS text to audio and video), which may lead to a serious contradiction between the supply and demand of bandwidth resources [114]. Although we can address the insufficient bandwidth resource problem brought by changes in the users’ business requirements by adjusting the trajectory position of UAVs in real time, this operation may cause a large amount of energy consumption to UAVs and aggravate the endurance problem of UAVs. In addition, the UAV movement trajectory designed for energy savings may result in low bandwidth utilization. Therefore, designing a UAV flight path and bandwidth resource allocation that can not only make efficient use of limited bandwidth resources but also reduce UAV energy consumption and meet users’ business needs has become a major challenge for UAV auxiliary communication.
Second, in temporary traffic hot spots, IoT device battery replacement is difficult, the computing power is limited, and IoT device local computing will consume considerable energy and have a large computing delay, especially for applications with high computing requirements (such as augmented reality and virtual reality, etc. ), which will seriously affect the service availability of IoT devices. Although the computing task of the IoT device can be unloaded by deploying the UAV communication network, including edge computing, the IoT device unloading computing task will consume part of the network bandwidth resources and adversely affect the quality of the multimedia communication services obtained by other users in the network. In addition, although reducing the UAV base station transmission power can improve the number of received calculation bits, the transmission power of the UAV is too low to meet the multimedia communication service requirements of downlink users. In addition, although reducing the UAV flight altitude can compensate for the loss of transmission power, it also reduces the coverage area of the UAV base station, resulting in poor coverage efficiency. Therefore, controlling UAV transmission power, allocating bandwidth resources, designing UAV flight trajectories to meet the business needs of uplink and downlink users, reducing the self-interference of UAV base stations and prolonging the service time of communication networks have become additional major challenges for UAV auxiliary communication.
The main contribution of this paper is that when using a single UAV to provide communication and computing services, it is necessary to comprehensively consider the UAV movement trajectory, computing offload scheduling, bandwidth allocation and UAV transmission power control, reduce the uplink and downlink resource competition conflict and UAV self-interference, and improve the energy efficiency of a UAV communication network integrating edge computing. On the one hand, the existing studies have not considered the differences of ground terminal services (such as multimedia communication services and the computing offload), which makes it difficult to meet the service needs of downlink and uplink users at the same time. On the other hand, most of the existing studies only focused on calculating the unloading rate or the energy consumption of ground equipment. There is little research on the joint optimization of calculating the unloading rate and UAV energy consumption.
Because of the above problems, this paper takes into account the multimedia communication service requirements of the ground users and the different network bandwidth requirements caused by the unloading of computing tasks. It is clear that the rational allocation of network resources and the full utilization of computing resources can be achieved through various optimization methods under the framework of UA-assisted MEC systems. Specifically, according to the communication quality between the unmanned aerial vehicle and the terrestrial computing device, select the computing task that is unloaded to the terrestrial user to effectively avoid the access conflict of the unloaded computing user. In addition, considering the severe energy consumption caused by UAVs when providing services to meet the business needs of ground users, the energy consumption of integrated edge computing for a single UAV communication network can be maximized by optimizing the UAV trajectory jointly, calculating the uninstall schedule, and allocating the bandwidth. In conclusion, we can find the value of the UAV-assisted MEC system framework in practical use.
5 Open problems and future opportunities for UAV-assisted wireless communication and MEC
In the following, the challenges of several studies will be explored so that future researchers can use the proposed algorithms for further research to eliminate the shortcomings in the literature.
5.1 Scale of resource management in UAV-assisted MEC
In terms of the relevant cluster size of UAVs, energy efficiency optimization models are designed for a single UAV Communication Network Integrating edge computing, a multi-UAV Communication Network Integrating edge computing and a multi-UAV satellite cooperative communication network integrating edge computing. The experimental results show that the relationship between system throughput and energy consumption, the relationship between the uplink communication link and the downlink communication link competing for bandwidth resources, and the shortage of bandwidth resources and transmission power can be compensated for by reducing the altitude of the UAV. It was verified that the proposed system has a better energy efficiency ratio and better performance than other systems. An important research direction for the future is to analyze the communication system that uses large-scale UAV clusters to provide more application services for a wider range of target areas for a longer time, explore the similarities and differences of UAV mobile modes in different application scenarios and different periods, and obtain more popular research results [115]. The research in this direction can not only comprehensively explain the internal relationship between the UAV mobile mode and the overall performance of the system but also provide valuable suggestions for operators and relevant government departments to formulate and evaluate the application of UAV network auxiliary services.
5.2 Practical application of resource management in a UAV-aided MEC
A UAV-assisted MEC theoretically accomplishes energy-efficient downlink transmission of a single UAV Communication Network, energy-efficient uplink and downlink cotransmission of a single UAV Communication Network, energy-efficient downlink transmission of a multi-UAV Communication Network and energy-efficient uplink and downlink cotransmission of a multi-UAV Communication Network, and they all have corresponding optimization models [116]. A series of simulations verify the effectiveness of the proposed scheme and algorithm. However, we have not verified whether the performance of the system in the real world is consistent with the theoretical performance. Therefore, future work will focus on applying the theoretical research system to the physical UAV network and will give full play to the application value of the research results.
5.3 Theoretical aspects of resource management in a UAV-assisted MEC
The energy efficiency and resource allocation optimization of UAV auxiliary communication in four application scenarios of single UAV Communication Network Service for the same type of users, single UAV Communication Network Service for different types of users, multi-UAV Communication Network Service for the same type of users and multi-UAV Communication Network Service for different types of users are studied in a layer-by-layer manner. The optimization model for the design is a fractional optimization problem that is neither convex nor concave. In this paper, traditional methods are used to deal with nonconvex problems. First, the fractional objective function is transformed into the integral objective function, and then the coordinate block descent algorithm and the Dinkelbach algorithm are used to solve the new optimization problem. The superiority of the proposed optimization scheme is verified by a large number of simulations. For future UAVs with larger scales, more complex service environments and higher service quality requirements, the next important research direction will be on using machine learning methods to address optimization problems [117].
At the same time, we can consider the user equipment perspective, assume that each ground user equipment has a certain mobility, and assume each user’s equipment itself has a certain computing power. On this basis, the optimization problem is established to jointly optimize the amount of data of user equipment unloading computing tasks, the association strategy with the UAV cluster, and the deployment location of the UAV cluster.
5.4 UAV height and base station in a UAV-assisted MEC
When analyzing the UAV trajectory, it is assumed that the UAV is flying at a fixed altitude. The impact of unmanned aerial vehicles flying at variable altitudes on unmanned aerial vehicle trajectories and system energy consumption is also a direction worth studying in the future. The UAV’s association with the user or with the ground is also considered. In the case of limited computing power, the scenario where an unmanned aerial vehicle collects user data and unloads it to a ground base station for ancillary computing is also worth investigating.
From the perspective of making full use of UAV mobility, we can also consider optimizing the flight trajectory of UAV clusters rather than considering the spatial location deployment of UAV clusters. In the existing studies, most of the initial points to optimize the trajectory of the UAV are set in the working range of the UAV. In practice, the initial point of the UAV will be a distance from the working area. Optimizing the starting trajectory of each UAV in the UAV cluster, as well as the working trajectory and return trajectory of the UAV, is worth further exploration.
5.5 Algorithm optimization in a UAV-assisted MEC
The system mainly solves the optimization problem of computing task unloading and resource allocation. The main solution is to transform the convex problem into a nonconvex problem and then find the optimal value. However, it is obvious that there are many complex scenes in actual production and life, and the optimization objectives will also face more interference. Therefore, for future UAVs with larger scales, more complex service environments and higher service quality requirements, the next important research direction is to use machine learning methods to address optimization problems.
6 Conclusion
UAVs can carry edge servers and provide computing services to ground user equipment on demand. In addition, taking advantage of the high mobility of the UAV and, by optimizing the trajectory of the UAV, a high-quality communication link can be formed with the ground user equipment to reduce the unloading computing task time of the user equipment. Although compared with the ground edge server, the computing resources carried by UAVs are limited. However, we can use multiple UAVs to provide services to ground user equipment at the same time.
With this background, this paper focuses on in-depth research on the computing resource allocation mechanism in UAV-assisted MEC. It uses the mobility of UAVs to meet the tasks of low delay and high computation of mobile devices, so the effective combination of the two can reduce the cost of network resource management in wireless communication. However, there are still difficulties to be resolved in UAV-assisted MEC. The flexibility of UAVs makes their position deployment and trajectory planning the focus of UAV-assisted MEC. At the same time, the size of UAVs limits the computing power and battery capacity of MEC servers. Therefore, reasonably allocating resources to limit energy consumption is also an issue worth studying.
Abbreviations
- UAV:
-
unmanned aerial vehicle
- MEC:
-
mobile edge computing
- LoS:
-
line of sight
- CPU:
-
central processing unit
- MCC:
-
mobile cloud computing
- ETSA:
-
European Telecommunications Standardization Association
- WPT:
-
wireless power transmission
- SCA:
-
successive convex approximation
- IoT:
-
Internet of things
- KKT:
-
Karush-Kuhn-Tucker
- BC:
-
broadcast channel
- D2D:
-
device-to-device
- NOMA:
-
non-orthogonal multiple access
- TD-LTE:
-
time division-long term elevation
References
Anwar, Muhammad Rizwan, Wang, Shangguang, Faisal, Akram Muhammad, Raza, Salman, & Mahmood, Shahid. (2022). 5g-enabled mec: A distributed traffic steering for seamless service migration of internet of vehicles. IEEE Internet of Things Journal, 9(1), 648–661.
Wang, Shuai., Vasilakos, Athanasios., Jiang, Hongbo., Ma, Xiaoqiang., Liu, Wenyu., Peng, Kai., Liu, Bo, & Dong Yan. (2011). Energy efficient broadcasting using network coding aware protocol in wireless ad hoc network. In 2011 IEEE International Conference on Communications (ICC), pages 1–5.
Souza, Caio, Falcao, Marcos, Balieiro, Andson, & Dias, Kelvin. (2021). Modelling and analysis of 5g networks based on mec-nfv for urllc services. IEEE Latin America Transactions, 19(10), 1745–1753.
Zhang, Tian, & Chen, Wei. (2021). Computation offloading in heterogeneous mobile edge computing with energy harvesting. IEEE Transactions on Green Communications and Networking, 5(1), 552–565.
Xiao, Zhu, Li, Fancheng, Jiang, Hongbo, Bai, Jing, Jisheng, Xu., Zeng, Fanzi, & Liu, Min. (2020). A joint information and energy cooperation framework for cr-enabled macro-femto heterogeneous networks. IEEE Internet of Things Journal, 7(4), 2828–2839.
Zeng, Fanzi, Li, Qiao, Xiao, Zhu, Havyarimana, Vincent, & Bai, Jing. (2018). A price-based optimization strategy of power control and resource allocation in full-duplex heterogeneous macrocell-femtocell networks. IEEE Access, 6, 42004–42013.
Jiang, H., Xiao, Z., Li, Z., Xu, J., & Wang, D. (2020). An energy-efficient framework for internet of things underlaying heterogeneous small cell networks. IEEE Transactions on Mobile Computing, PP(99), 1.
Xiao, Z., Liu, H., Vincent, Havyarimana, Li, T., & Dong, W. (2016). Analytical study on multi-tier 5g heterogeneous small cell networks: Coverage performance and energy efficiency. Sensors, 16, 1854.
Jiang, Hongbo, Dai, Xingxia, Xiao, Zhu, & Iyengar, Arun K. (2022). Joint task offloading and resource allocation for energy-constrained mobile edge computing. IEEE Transactions on Mobile Computing, pages 1.
Dai, Xingxia, Xiao, Zhu, Jiang, Hongbo, Alazab, Mamoun, Lui, John, Dustar, Schaharam, & Liu, Jiangchuan. (2022). Task co-offloading for d2d-assisted mobile edge computing in industrial internet of things. IEEE Transactions on Industrial Informatics, pages 1.
Mahata, S., Saha, S. K., Kar, R., & Mandal, D. (2017). Optimal design of wideband digital integrators and differentiators using hybrid flower pollination algorithm. Soft Computing, 32, 3757.
Li, Bin, Fei, Zesong, & Zhang, Yan. (2019). Uav communications for 5g and beyond: Recent advances and future trends. IEEE Internet of Things Journal, 6(2), 2241–2263.
Wang, Peixin, Li, Youming, Chang, Shengming, Jin, Xiaoping, & Wang, Xiaoli. (2020). Time-of-arrival-based localization algorithm in mixed line-of-sight-line-of-sight environments. International Journal of Distributed Sensor Networks., 16, 1550147720913808.
Chen, Chien Sheng. (2017). A non-line-of-sight error mitigation method for location estimation. International Journal of Distributed Sensor Networks, 13(1), 1550147716682739.
Adnan, Landolsi Mohamed, & Almutairi, Ali F. (2016). Reliable line-of-sight and non-line-of-sight propagation channel identification in ultra-wideband wireless networks. International Journal of Electronics and Communication Engineering, 11(1), 23–26.
Kang, Zhenyu, You, Changsheng, & Zhang, Rui. (2021). 3d placement for multi-uav relaying: An iterative gibbs-sampling and block coordinate descent optimization approach. IEEE Transactions on Communications, 69(3), 2047–2062.
Naitsat, Alexander, Zhu, Yufeng, & Zeevi, Yehoshua Y. (2020). Adaptive block coordinate descent for distortion optimization. Computer Graphics Forum, 39(6), 360–376.
Rabanser, Simon, Neumann, Lukas, & Haltmeier, Markus. (2019). Analysis of the block coordinate descent method for linear ill-posed problems. SIAM Journal on Imaging Sciences, 12(4), 1808–1832.
Huang, Yennun, Chen, Yih-farn, Jana, Rittwik, Jiang, Hongbo, Rabinovich, Michael, Reibman, Amy, Wei, Bin, & Xiao, Zhen. (2007). Capacity analysis of mediagrid: A p2p iptv platform for fiber to the node (fttn) networks. IEEE Journal on Selected Areas in Communications, 25(1), 131–139.
Jiang, Hongbo, Li, Jie, Zhao, Ping, Zeng, Fanzi, Xiao, Zhu, & Iyengar, Arun K. (2021). Location privacy-preserving mechanisms in location-based services. ACM Computing Surveys (CSUR)., 54, 1–36.
Chen, Kongyang, Wang, Chen, Yin, Zhimeng, Jiang, Hongbo, & Tan, Guang. (2018). Slide: Towards fast and accurate mobile fingerprinting for wi-fi indoor positioning systems. IEEE Sensors Journal, 18(3), 1213–1223.
Jiang, Hongbo, Ge, Zihui, Jin, Shudong, & Wang, Jia. (2010). Network prefix-level traffic profiling: Characterizing, modeling, and evaluation. Computer Networks, 54(18), 3327–3340.
Jiang, H., Iyengar, A., Nahum, Erich., Segmuller, W., & Wright, C. P. (2009). Load balancing for sip server clusters. In Infocom.
Haojun, Huang, Hao, Yin, Geyong, Min, Hongbo, Jiang, & Junbao, Zhang. (2017). Data-driven information plane in software-defined networking. IEEE Communications Magazine, 55(6), 218–224.
Iyengar, A. K., Jiang, H., Nahum, E. M., Segmuller, W., Tantawi, A. N. & Wright, C. P. (2011). Method and system for load balancing with affinity.
Jiang, H., Jie, C., Dan, W., Wang, C., & Tan, G. (2011). Continuous multi-dimensional top-k query processing in sensor networks. In INFOCOM, 2011 Proceedings IEEE.
Jiang, H., Zhao, P., & Wang, C. (2018). Roblop: Towards robust privacy preserving against location dependent attacks in continuous lbs queries. IEEE/ACM Transactions on Networking, pp. 1018–1032.
Parada, C., Fontes, F., Marques, C., Cunha, V., & Leitao, C. (2018). Multi-access edge computing: A 5g technology. pp. 277–9.
Abbas, Nasir, Zhang, Yan, Taherkordi, Amir, & Skeie, Tor. (2018). Mobile edge computing: A survey. IEEE Internet of Things Journal, 5(1), 450–465.
Chmaj, G., & Selvaraj, H. (2015). Distributed processing applications for uav/drones: A survey. In International Conference on Systems Engineering.
Gupta, Lav, Jain, Raj, & Vaszkun, Gabor. (2016). Survey of important issues in uav communication networks. IEEE Communications Surveys Tutorials, 18(2), 1123–1152.
Hao, Y., Miao, Y., Hu, L., Hossain, M. S., Muhammad, G., & Amin, S. U. (2019). Smart-edge-cocaco: Ai-enabled smart edge with joint computation, caching, and communication in heterogeneous iot. IEEE: Network.
Liao, X., Xu, C., & Yue, H. (2019). Enable uavs safely flight in low-altitude: A preliminary research of the public air route network of uavs. In 2019 International Conference on Unmanned Aircraft Systems (ICUAS).
Zhong, Xijian, Guo, Yan, Li, Ning, & Chen, Yancheng. (2020). Joint optimization of relay deployment, channel allocation, and relay assignment for uavs-aided d2d networks. IEEE/ACM Transactions on Networking, 28(2), 804–817.
Li, Bing, Zhao, Shengjie, Zhang, Rongqing, & Yang, Liuqing. (2021). Full-duplex uav relaying for multiple user pairs. IEEE Internet of Things Journal, 8(6), 4657–4667.
Zhong, Xijian, Guo, Yan, Li, Ning, & Li, Shanling. (2020). Joint relay assignment and channel allocation for opportunistic uavs-aided dynamic networks: A mood-driven approach. IEEE Transactions on Vehicular Technology, 69(12), 15019–15034.
Gao, Honghao, Liu, Can, Yin, Yuyu, Yueshen, Xu., & Li, Yu. (2021). A hybrid approach to trust node assessment and management for vanets cooperative data communication: Historical interaction perspective. IEEE Transactions on Intelligent Transportation Systems, pages 1–10.
GaoHonghao, HuangWanqiu, & DuanYucong. (2021). The cloud-edge-based dynamic reconfiguration to service workflow for mobile ecommerce environments. ACM Transactions on Internet Technology (TOIT).
Wang, Haichao, Wang, Jinlong, Ding, Guoru, Chen, Jin, Li, Yuzhou, & Han, Zhu. (2018). Spectrum sharing planning for full-duplex uav relaying systems with underlaid d2d communications. IEEE Journal on Selected Areas in Communications, 36(9), 1986–1999.
Mohana, S. D., Shiva Prakash, S. P., & Krinkin, Kirill. (2022). Service oriented r-ann knowledge model for social internet of things.
Chakraborty, Ayon., Chai, Eugene., Sundaresan, Karthikeyan., & et.al. (2018). Skyran: A self-organizing lte ran in the sky. In Proceedings of the 14th International Conference on Emerging Networking EXperiments and Technologies, CoNEXT ’18, page 280-292, New York, NY, USA. Association for Computing Machinery.
Qingqing, Wu., Jie, Xu., & Zhang, Rui. (2018). Capacity characterization of uav-enabled two-user broadcast channel. IEEE Journal on Selected Areas in Communications, 36(9), 1955–1971.
Asiful Huda, S. M., & Moh, Sangman. (2022). Survey on computation offloading in uav-enabled mobile edge computing. Journal of Network and Computer Applications, 201, 103341.
Zhang, W., Li, L., Zhang, N., Han, T., & Wang, S. (2020). Air-ground integrated mobile edge networks: A survey. IEEE Access, PP(99), 1.
Arioua, M. (2021). Uav-enabled mobile edge-computing for iot based on ai: A comprehensive review. Drones, 5.
Cai, Yunlong, Cui, Fangyu, Shi, Qingjiang, et al. (2018). Dual-uav-enabled secure communications: Joint trajectory design and user scheduling. IEEE Journal on Selected Areas in Communications, 36(9), 1972–1985.
Zhu, Yongxu, Zheng, Gan, & Fitch, Michael. (2018). Secrecy rate analysis of uav-enabled mmwave networks using matérn hardcore point processes. IEEE Journal on Selected Areas in Communications, 36(7), 1397–1409.
Prajna, Stephen, Parrilo, Pablo, & Rantzer, Anders. (2004). Nonlinear control synthesis by convex optimization. IEEE Transactions on Automatic Control, 49(2), 310–314.
Sun, Yan, Dongfang, Xu., Ng, Derrick Wing Kwan., et al. (2019). Optimal 3d-trajectory design and resource allocation for solar-powered uav communication systems. IEEE Transactions on Communications, 67(6), 4281–4298.
Qingqing, Wu., & Zhang, Rui. (2018). Common throughput maximization in uav-enabled ofdma systems with delay consideration. IEEE Transactions on Communications, 66(12), 6614–6627.
Zeng, Yong, Xiaoli, Xu., & Zhang, Rui. (2018). Trajectory design for completion time minimization in uav-enabled multicasting. IEEE Transactions on Wireless Communications, 17(4), 2233–2246.
Lyu, Jiangbin, Zeng, Yong, & Zhang, Rui. (2018). Uav-aided offloading for cellular hotspot. IEEE Transactions on Wireless Communications, 17(6), 3988–4001.
You, Changsheng, & Zhang, Rui. (2019). 3d trajectory optimization in rician fading for uav-enabled data harvesting. IEEE Transactions on Wireless Communications, 18(6), 3192–3207.
Gong, Jie, Chang, Tsung-Hui., Shen, Chao, et al. (2018). Flight time minimization of uav for data collection over wireless sensor networks. IEEE Journal on Selected Areas in Communications, 36(9), 1942–1954.
Cui, Fangyu, Cai, Yunlong, Qin, Zhijin, et al. (2019). Multiple access for mobile-uav enabled networks: Joint trajectory design and resource allocation. IEEE Transactions on Communications, 67(7), 4980–4994.
Chowdhury, Md Moin Uddin., Maeng, Sung Joon, Bulut, Eyuphan, et al. (2020). 3-d trajectory optimization in uav-assisted cellular networks considering antenna radiation pattern and backhaul constraint. IEEE Transactions on Aerospace and Electronic Systems, 56(5), 3735–3750.
Huici, Wu., Wei, Zhiqing, Hou, Yanzhao, et al. (2020). Cell-edge user offloading via flying uav in non-uniform heterogeneous cellular networks. IEEE Transactions on Wireless Communications, 19(4), 2411–2426.
Samir, Moataz, Sharafeddine, Sanaa, Assi, Chadi M., et al. (2020). Uav trajectory planning for data collection from time-constrained iot devices. IEEE Transactions on Wireless Communications, 19(1), 34–46.
Xiaoli, Xu., Zeng, Yong, Guan, Yong Liang, et al. (2018). Overcoming endurance issue: Uav-enabled communications with proactive caching. IEEE Journal on Selected Areas in Communications, 36(6), 1231–1244.
Mozaffari, Mohammad, Saad, Walid, Bennis, Mehdi, et al. (2017). Mobile unmanned aerial vehicles (uavs) for energy-efficient internet of things communications. IEEE Transactions on Wireless Communications, 16(11), 7574–7589.
Zeng, Yong, & Zhang, Rui. (2017). Energy-efficient uav communication with trajectory optimization. IEEE Transactions on Wireless Communications, 16(6), 3747–3760.
Huang, Wenhuan, Yang, Zhaohui, Pan, Cunhua, et al. (2019). Joint power, altitude, location and bandwidth optimization for uav with underlaid d2d communications. IEEE Wireless Communications Letters, 8(2), 524–527.
Zhang, Chiya, & Zhang, Wei. (2017). Spectrum sharing for drone networks. IEEE Journal on Selected Areas in Communications, 35(1), 136–144.
Deng, Qingyong, Li, Zhetao, Chen, Jiabei, et al. (2018). Dynamic spectrum sharing for hybrid access in ofdma-based cognitive femtocell networks. IEEE Transactions on Vehicular Technology, 67(11), 10830–10840.
Xiao, Zhu, Dai, Xingxia, Jiang, Hongbo, et al. (2020). Vehicular task offloading via heat-aware mec cooperation using game-theoretic method. IEEE Internet of Things Journal, 7(3), 2038–2052.
V. L. Dao, H. Tran, S. Girs, and E. Uhlemann. (2019). Reliability and fairness for uav communication based on non-orthogonal multiple access. In 2019 IEEE International Conference on Communications Workshops (ICC Workshops).
Ding, R., Gao, F., & Shen, X. S. (2020). 3d uav trajectory design and frequency band allocation for energy-efficient and fair communication: A deep reinforcement learning approach. IEEE Transactions on Wireless Communications, 99, 1.
Mmu Chowdhury, S. J. Maeng, E. Bulut, and I. Guvenc. (2019). Effects of 3d antenna radiation and two-hop relaying on optimal uav trajectory in cellular networks. IEEE.
J. Hu, H. Zhang, X. Li, and H. Ji. (2020). Task-Aware Joint Computation Offloading for UAV-Enabled Mobile Edge Computing Systems. Communications and Networking.
Y. Si, Z. Chao, Y. Li, and B. Yu. (2018). Optimization design of new solar uav detection and communication based on pso-aco algorithm. Journal of Beijing University of Civil Engineering and Architecture.
Zeng, Y., & Zhang, R. (2017). Energy-efficient uav communication with trajectory optimization. IEEE Transactions on Wireless Communications., 16, 3747–3760.
T. Furutani, Y. Kawamoto, H. Nishiyama, and N. Kato. (2018). Uav-assisted information diffusion technique with uniquely virtual cells based on wi-fi direct. In 2018 21st International Symposium on Wireless Personal Multimedia Communications (WPMC).
Z. Liang, A. Elik, S. Dang, and B. Shihada. (2021). Energy-efficient trajectory optimization for uav-assisted iot networks. IEEE Transactions on Mobile Computing.
Rong-Rong, Lu., Wang, Jin-Yuan., Xian-Tao, Fu., Lin, Sheng-Hong., Wang, Qinglin, & Zhang, Bingyuan. (2022). Performance analysis and optimization for uav-based fso communication systems. Physical Communication, 51, 101594.
Hongyang Du, Dusit Niyato, Yuan-Ai Xie, Yanyu Cheng, Jiawen Kang, and Dong In Kim. (2022). Performance analysis and optimization for jammer-aided multi-antenna uav covert communication. p. 02.
Yin, L., Wang, C., & Ien, G. E. (2009). On the minimization of communication energy consumption of correlated sensor nodes. Wireless Personal Communications, 50(1), 57–67.
Waqas, M., Sidhu, Gas, Jabeen, T., Ahmad, M. A., & Javed, M. A. (2018). Transmit power optimization for relay-aided multi-carrier d2d communication. Tsinghua Science & Technology, 23(1), 65–74.
Kinoshita, K., Nakagawa, M., Kawano, K., & Murakami, K. (2014). An efficient spectrum sharing method based on genetic algorithm in heterogeneous wireless network. International Journal of Computer Networks & Communications, 6, 5.
Xu, Z., Yuan, J., Wang, Y., Zhang, Y., & Feng, Z. (2011). Uav relay network to provide communications in mobile ad hoc networks. Journal of Tsinghua University(Science and Technology), 51(2), 150–155.
L. Shi, Y. Ye, X. Chu, and G. Lu. (2020). Computation energy efficiency maximization for a noma based wpt-mec network. IEEE Internet of Things Journal, p. (99).
Zhe Liu, Qi Qi Wang, Si Yu Huang, Ling Xuan Kong, Zhong Zhuang, Qi Wang, Hua Fen Li, and Ya Nan Wan. (2022). The risks of sulfur addition on cadmium accumulation in paddy rice under different water-management conditions.
B. Yang, X. Cao, J. Bassey, X. Li, and L. Qian. (2019). Computation offloading in multi-access edge computing networks: A multi-task learning approach. In ICC 2019 - 2019 IEEE International Conference on Communications (ICC).
Yu, R., Yuan, Z., Zhao, M., Yu, M., & Lu, X. (2013). Damping based traffic allocation in wireless machine-to-machine communications networks. International Journal of Distributed Sensor Networks, 9(11), 814267.
B. Yang, X. Cao, X. Li, T. Kroecker, and L. Qian. (2019). Joint communication and computing optimization for hierarchical machine learning tasks distribution. In 2019 IEEE Symposium on Computers and Communications (ISCC).
Y. Du, K. Wang, K. Yang, and G. Zhang. (2019). Energy-efficient resource allocation in uav based mec system for iot devices. In 2018 IEEE Global Communications Conference (GLOBECOM).
Z. Feng, Z. Na, M. Xiong, and C. Ji. (2022). Multi-uav collaborative wireless communication networks for single cell edge users. Mobile Networks and Applications, pp. 1–15.
X. Zhang, H. Zhang, H. Ji, and X. Li. (2020). Joint optimization of uav trajectory and relay ratio in uav-aided mobile edge computation network. In 2020 IEEE 31st Annual International Symposium on Personal, Indoor and Mobile Radio Communications.
Youssef, M. J., Farah, J., Nour, C. A., & Douillard, C. (2017). Waterfilling-based resource allocation techniques in downlink non-orthogonal multiple access (noma) with single-user mimo. In 2017 IEEE Symposium on Computers and Communications (ISCC).
Yan, K. T., Yu, M. P., Tran, N. H., Saad, W., & Hong, C. S. (2020). Energy-efficient resource management in uav-assisted mobile edge computing. IEEE Communications Letters, p. 99,
Wang, X., Li, C., Yu, L., Han, L., Deng, X., Yang, E., & Ren, P. (2019). Uav first view landmark localization with active reinforcement learning. Pattern Recognition Letters, 125, 549–555.
He, P., & Li, J. (2021). A joint optimization framework for wheat harvesting and transportation considering fragmental farmlands - sciencedirect. Information Processing in Agriculture, 8(1), 1–14.
Lei, M., Zhang, X., Yu, B., Fowler, S., & Yu, B. (2021). Throughput maximization for uav-assisted wireless powered d2d communication networks with a hybrid time division duplex/frequency division duplex scheme. Wireless Networks, 27(3), 2147–2157.
Zhang, Y., Huang, A., Wang, D., Duan, X., Jiao, B., & Xie, L. (2013). To enable stable medical image and video transmission in mobile healthcare services: A best-fit carrier dial-up (bcd) algorithm for gbr-oriented applications in lte-a networks. IEEE
Liu, M., Wang, Y., Li, Z., Lyu, X., & Chen, Y. (2020). Joint optimization of resource allocation and multi-uav trajectory in space-air-ground iort networks. In 2020 IEEE Wireless Communications and Networking Conference Workshops (WCNCW).
Zhang, Xiaochen, Zhang, Jiao, Xiong, Jun, et al. (2020). Energy-efficient multi-uav-enabled multiaccess edge computing incorporating noma. IEEE Internet of Things Journal, 7(6), 5613–5627.
Reza, M. N., Na, I. S., Sun, W. B., & Lee, Kyeong Hwan. (2018). Rice yield estimation based on k-means clustering with graph-cut segmentation using low-altitude uav images. Biosystems Engineering, 177, 109–121.
Zhao, H., Wang, H., Wu, W., & Wei, J. (2018). Deployment algorithms for uav airborne networks toward on-demand coverage. IEEE Journal on Selected Areas in Communications
Shen, F., Ding, G., Wang, Z., & Wu, Q. (2019). Uav-based 3d spectrum sensing in spectrum-heterogeneous networks. IEEE Transactions on Vehicular Technology, 68, 5711.
Flamini, Roberto, & Donno, De. (2022). Danilo, Gambini, Jonathan, Giuppi, Francesco, Mazzucco, Christian, & Milani, Angelo and Laura Resteghini. An industrial viewpoint: Towards a heterogeneous smart electromagnetic environment for millimeter-wave communications.
Xu, X., Zeng, Y., Guan, Y. L., & Zhang, R. (2018). Overcoming endurance issue: Uav-enabled communications with proactive caching. IEEE Journal on Selected Areas in Communications, 36(6), 1231–1244.
Qiang, C., & Wang, Y. (2016). A research on network reading guidance from the perspective of communication. Research on Library Science.
YangWenjie. (2016). On the adaptation of the network novel from the perspective of media communication. Image Vision.
Kcd, A., Ar, B., Mc, C., Pb, D., & Jm, E. (2016). Vehicle-to-vehicle (v2v) and vehicle-to-infrastructure (v2i) communication in a heterogeneous wireless network - performance evaluation. Transportation Research Part C: Emerging Technologies, 68, 168–184.
Zhang, T., Lei, J., Liu, Y., Feng, C., & Nallanathan, A. (2021). Trajectory optimization for uav emergency communication with limited user equipment energy: A safe-dqn approach.
Wei, Y., Lai, H., Xia, G., Da, G., & Hou, C. (2016). Energy-saving power allocation scheme for relay networks based on graphical method of classification. new york: Springer International Publishing.
Gu, Y., Huang, Y., Hu, H., Gao, W., & Pan, Y. (2021). Energy efficiency optimization of cognitive uav-assisted edge communication for semantic internet of things. Wireless Communications and Mobile Computing., 2021, 1–12.
Ji, B., Li, Y., Zhou, B., Li, C., Song, K., & Wen, H. (2019). Performance analysis of uav relay assisted iot communication network enhanced with energy harvesting. IEEE Access, pages 38738–38747.
D González González, M García Lozano, and S Ruiz Boqué. (2014). Intercell interference coordination for control channels in lte and lte-a. An optimization scheme based on evolutionary algorithms. Wireless Personal Communications, pages 1–22.
Jain, A., Lopez-Aguilera, E., & Demirkol, I. (2020). User association and resource allocation in 5g (aura-5g): A joint optimization framework.
Moradi, Mehrdad., Sundaresan, Karthikeyan., Chai, Eugene., & et al. (2018). Skycore: Moving core to the edge for untethered and reliable uav-based lte networks. MobiCom ’18, page 35-49, New York, NY, USA. Association for Computing Machinery.
Rahman, M. T., Chowdhury, M. Z., & Jang, Y. M. (2016). Radio access network selection mechanism based on hierarchical modelling and game theory. In 2016 International Conference on Information and Communication Technology Convergence (ICTC).
Abdullah, Saima, Asghar, Mamoona N., Ashraf, Mashavia, & Abbas, Naila. (2020). An energy-efficient message scheduling algorithm with joint routing mechanism at network layer in internet of things environment. Wireless Personal Communications, 111(3), 1821–1835.
Huang, T., Duan, D. T., Gong, Y. J., Ye, L., & Zhang, J. (2020). Concurrent optimization of multiple base learners in neural network ensembles: An adaptive niching differential evolution approach. Neurocomputing, 396, 24–38.
Tong, L., Zhu, X., Georges, H. M., Luo, Z., & Dong, W. (2016). Performance analysis of co- and cross-tier device-to-device communication underlaying macro-small cell wireless networks. KSII Transactions on Internet and Information Systems, 10(4), 1481–1500.
Jinsong, Hu., Yongpeng, Wu., Chen, Riqing, et al. (2020). Optimal detection of uav’s transmission with beam sweeping in covert wireless networks. IEEE Transactions on Vehicular Technology, 69(1), 1080–1085.
Xiang, X., Lin, C., & Chen, X. (2015). Ecoplan: Energy-efficient downlink and uplink data transmission in mobile cloud computing. Wireless Networks, 21(2), 453–466.
Wang, Haichao, Wang, Jinlong, Chen, Jin, et al. (2018). Network-connected uav communications: Potentials and challenges. China Communications, 15(12), 111–121.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This work was supported in part by the National Natural Science Foundation of China under Grant U20A20181; in part by the Key Research and Development Project of Hunan Province of China under Grant 2022GK2020; in part by Hunan Natural Science Foundation of China under Grant 2022JJ2059, in part by the Funding Projects of Zhejiang Lab under Grant 2021LC0AB05. (The corresponding author of this paper is Hongbo Jiang)
Rights and permissions
About this article

Cite this article
Xiao, Z., Chen, Y., Jiang, H. et al. Resource management in UAV-assisted MEC: state-of-the-art and open challenges. Wireless Netw 28, 3305–3322 (2022). https://doi.org/10.1007/s11276-022-03051-4
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11276-022-03051-4