
Abstract
Identifying areas with high groundwater potential is important for groundwater resources management. The main objective of this study is to propose a novel classifier ensemble method, namely Random Forest Classifier based on Random Subspace Ensemble (RS-RF), for groundwater potential mapping (GWPM) in Qorveh-Dehgolan plain, Kurdistan province, Iran. A total of 12 conditioning factors (slope, aspect, elevation, curvature, stream power index (SPI), topographic wetness index (TWI), rainfall, lithology, land use, normalized difference vegetation index (NDVI), fault density, and river density) were selected for groundwater modeling. The least square support vector machine (LSSVM) feature selection method with a 10-fold cross-validation technique was used to validate the predictive capability of these conditioning factors for training the models. The performance of the RS-RF model was validated using the area under receiver operating characteristic curve (AUROC), success and prediction rate curves, kappa index, and several statistical index-based measures. In addition, Friedman and Wilcoxon signed-rank tests were used to assess statistically significant level among the new model with the state-of-the-art soft computing benchmark models, such as random forest (RF), logistic regression (LR) and naïve Bayes (NB). Results showed that the new hybrid model of RS-RF had a very high predictive capability for groundwater potential mapping and exhibited the best performance among other benchmark models (LR, RF, and NB). Results of the present study might be useful to water managers to make proper decisions on the optimal use of groundwater resources for future planning in the critical study area.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
As one of the most critical resources throughout the world, groundwater supplies required water for agriculture, industry, animal husbandry, and human communities (Neshat et al. 2014). About one third of world population is fully dependent on groundwater (Rahmati et al. 2018) such that it is the main source of drinking water in many countries, such as the U.S., Canada and Germany and the only source for community uses in some other countries, such as Austria, Denmark, and Lithuania (Manap et al. 2013). In Iran, over 70% of the people, living in rural and urban areas, are reliant on groundwater resources for their drinking and domestic requirements (Rahmati 2013). Recently, many regions of Iran have become dried up due mainly to climate change and intensive withdrawal of available groundwater resources, resulting in a serious lack of water in many provinces of the country (Osati et al. 2014).
Driven by rainwater, surface water, and snow melting, groundwater occurrence and movement are affected by many factors which are related to topography, lithology, geologic structures, fracture density, aperture and connectivity, secondary porosity, groundwater table distribution, groundwater recharge, slope, drainage pattern, landforms, land cover, climatic condition, and their interrelationships and interactions (Oh et al. 2011). Due to the plurality of affecting factors, groundwater assessment and identifying its potential areas are complicated and still a challenge to water resources managers.
To identify groundwater potential areas, it is necessary to apply methods that will assist managers to use these sources more effectively (Rahmati et al. 2015). These methods are needed for future development, management, and prevention of declining groundwater resources. Many studies have used GIS and RS techniques for assessing groundwater potential mapping (Jha et al. 2007), including frequency ratio (FR) (Naghibi et al. 2015), multi-criteria decision analysis (Chenini et al. 2010), weight of evidence (WOE) (Tahmassebipoor et al. 2016), and analytical hierarchy processing (AHP) (Shekhar and Pandey 2015).
During the past decade, machine learning algorithms, such as random forest (Rahmati et al. 2015), extreme learning machine (ELM) (Lian et al. 2014), support vector machine (SVM) (Micheletti et al. 2014), logistic regression (LR) (Mair and El-Kadi 2013), Naive Bayes (NB) (Farid et al. 2014) and decision tree (Tehrany et al. 2013) have been applied to groundwater potential mapping. More recently, machine learning ensemble techniques, known as efficient techniques, are becoming popular for enhancing the prediction accuracy of weaker single classifier (Pham et al. 2015). A full range of these various techniques have been comprehensively reviewed in Golkarian et al. (2018), Rahmati et al. (2018), Golkarian et al. (2018), and Falah et al. (2017). Even though these new ensemble techniques have been successfully applied for studying landsides (Shirzadi et al. 2017a; Shirzadi et al. 2017b), they have rarely been assessed in groundwater studies. Thus, the main objective of this study was to propose a novel classifier ensemble method, which is a hybrid intelligence approach of two state-of-the-art machine learning methods, namely Random Subspace Ensemble based on Random Forest classifier (RF-RS) for groundwater potential mapping in Qorveh-Dehgolan plain, Kurdistan province, Iran. Applying this approach in the study area, where the area is a part of semi-arid areas of Iran, can be considered as a new attempt for identifying groundwater potential areas.
2 Study Area and Geological Setting
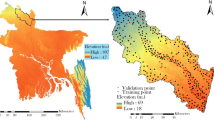
The Qorveh–Dehgolan plain was selected for this study, since the area has experienced a dramatic average decline of 85.5 m in its groundwater level during the last two decades (Rahmati 2013). The aquifer of Qorveh–Dehgolan plain is located in the southeastern part of Kurdistan province (Iran) (Fig. 1). It lies between 47°10′ E and 48°8′ E longitudes and 34°55′ N and 35°25′ N latitudes, covering an area of about 890.3 Km2. The elevation of the study area ranges from 1700 m to 2800 m. The average temperature ranges from 10 to 13 °C and the average annual precipitation is 345 mm. The study area is part of Sanandaj–Sirjan geological structural zone in Iran, which its 87.2% is covered by the quaternary deposits (Alavi 1994). The most common land uses within the study area are dry-farming agriculture (37.4%) and irrigated agriculture (22.7%). Other types of land uses, such as pastures (19.2%), barren lands (16.9%), residential areas, and gardens are also present in the study area. The plain uses two sources of water supplies; surface water and groundwater. Most of the surface water is used for irrigation purposes; while, groundwater in the study area is intensively used for domestic purposes as well as agricultural production.

Study area on Iran and Kurdistan province maps
3 Data and Methodology
3.1 Groundwater Inventory
Groundwater data, including piezometric well locations, number of wells, discharge, well diameter, and groundwater level and depth, were collected from the Kurdistan Regional Water Authority (KRWA). A total of 47 groundwater piezometric wells data were identified in the study area. The data were randomly divided into two parts. One part included 70% of the total piezometric wells data (33 groundwater wells) which were then used for generating the training dataset. The other part consisted of the remaining 30% piezometric wells data (14 groundwater wells) utilized later for generating the validation dataset. Additionally, as groundwater modeling was concerned, groundwater potential locations were considered as a binary classification issue. Therefore, a total of 47 non-groundwater piezometric wells data (the locations where there was no groundwater well) were also extracted from the study area for generating training dataset (33 locations), and testing dataset (14 locations).
3.2 Geo-environmental Factors Affecting Groundwater Potential
Slope angle is a land characteristic which can assist the identification of groundwater conditions through controlling infiltration (Al Saud 2010). In the present study, slope angle varied from 0 to 43 degrees which was then divided into 4 categories to prepare a slope map (Fig. 2a).


Groundwater conditioning factors: a Slope angle, b Slope aspect c Elevation, d Curvature, e SPI, f TWI, g Rainfall, h River density, i Land use, j Lithology, k Fault density, and l NDVI
Slope aspect indirectly impacts groundwater investigation and is divided into nine categories to prepare its map (Fig. 2b).
Elevation is known as terrain ruggedness, playing the same role as slope angle such that the higher the elevation is, the lower the infiltration and recharge will be (Manap et al. 2014). Elevation in the study area ranged from 1731 m to 2372 m. The elevation map was constructed with seven categories as shown in (Fig. 2c).
Curvature indirectly influences groundwater recharge (Dar et al. 2010; Oh et al. 2011). It varied from −11.25 to 12.5 (m/100 m) which was then divided into three categories to construct the curvature map (Fig. 2d).
Extracted from Digital Elevation Model (DEM), SPI can affect groundwater recharge through the concept of variable source area (Chapi et al. 2015; Naghibi et al. 2015; Nampak et al. 2014). The SPI ranged from 0 to 518,446 which was divided into 6 categories for preparing the SPI map of the study area (Fig. 2e). SPI was computed as follow (Moore and Wilson 1992):
where AS is the specific basin area, and β is the local slope gradient (in degree).
TWI positively affects groundwater potential mapping (Oh et al. 2011) through the effect of topography on the location and magnitude of saturated source areas of runoff generation. Equation (2) proposed by (Moore et al. 1991) was used for TWI computation:
where AS is the specific basin area, and β is the local slope gradient (in degree). TWI, ranging from 2 to 11, was used to generate the TWI map with 8 categories (Fig. 2f).
Rainfall is a hydrologic process for recharging aquifers as it increases, groundwater potentiality correspondingly increases (Oikonomidis et al. 2015). The rainfall map of the study area was generated by virtue of five classes of rainfall ranging between 277 mm and 536 mm, averaged from 30 years data of 10 weather stations (Fig. 2g).
River density represents a watershed drainage condition (Oikonomidis et al. 2015) though which affecting groundwater recharge (Oh et al. 2011). River density values ranged from 0 to 1.82 which was then divided into four categories to construct the river density map (Fig. 2h).
Lithology controls soil porosity and water permeability (Chowdhury et al. 2010) which they, in turn, affects the specific storage of groundwater. The lithology map (Fig. 2i) was extracted from the geological map at a 1:100,000 scale obtained from the Geological Survey & Mineral Exploitation of Iran (GSI).
Fault density is a form of lineament which affects the storage and movement of groundwater (Devi et al. 2001; Nampak et al. 2014). The fault density map was produced from the geological map of Sanandaj with a 1:100000 scale. The fault density value in the study area change from 0 to 0.63, divided into six categories for the map (Fig. 2j).
Land use/cover directly influences infiltration and surface runoff (Dinesh Kumar et al. 2007). Land use was generated from OLI sensor images from Landsat 8 satellite using the supervised Maximum Likelihood (MLC) model in ENVI 5.1. Seven land use layers were recognized, including irrigated-farming lands, gardens, barren lands, dry-farming lands, pastures, water bodies, and residential areas (Fig. 2k).
Normalized Difference Vegetation Index (NDVI) investigates long-term changes in vegetated areas (Fu and Burgher 2015). The changes in groundwater levels (Aguilar et al. 2012) and groundwater flow discharge (Petus et al. 2012) can be correlated to the NDVI. The NDVI map was prepared through OLI sensor images from Landsat 8 in ENVI5.1. The NDVI values varied between −0.45 and 0.88 which were then divided into five categories (Fig. 2l).
3.3 Feature Selection Method of Least Square Support Vector Machine (LSSVM)
The aim of feature selection is to remove irrelevant factors in order to increase the generalization performance of a given learning algorithm (Guyon and Elisseeff 2003). To achieve more accurate prediction of a groundwater potential map, not only selecting a model but also the quality of conditioning factors is important (Pradhan 2013). It is possible that in the modeling process, some of the conditioning factors may play ineffective roles, due to the effect of noise on the predictive ability. Therefore, recognizing and removing conditioning factors with low or null predictive ability is one of the most significant stages before conducting the learning process (Bui et al. 2015). For this purpose, there are some techniques, including Fuzzy-Rough sets (Dubois and Prade 1990), Relief (Kononenko 1994), Information Gain Ratio (Quinlan 1996), and Least Square Support Vector Machine (LSSVM) (Suykens et al. 2002). In this study, feature selection was carried out using the LSSVM method, a standard SVM technique which has been modified (Tang et al. 2005). Consider a training dataset of n training sample pairs (xi, yi), i = 1, 2, ..., n, where xi ∈ ℝ the ith training sample is and yi = (±1) is the class label of well (+1) and non-well (−1). LSSVM was computed using a mapping function Φ to map the input data into regeneration kernel Hilbert space (defined by kernel function; k (xi, xj) = Φ (xi). Φ (xj)). The general framework of the LSSVM can be expressed as follows:
where ei is the regression error, γ is a positive constant, wT is the inverse matrix of weight matrix assigned to each groundwater well conditioning factor, a = (a1, a2,…a11) is the vector of inputs that contains eleven groundwater well conditioning factors, and b is offset from the origin of the hyper-plane.
3.4 Accuracy Assessment and Comparison
3.4.1 Statistical Index
To assess the reliability of model prediction, validation is a significant phase (Chung and Fabbri 1993; Nampak et al. 2014). For achieving this target, some metric predictions are usually used, including sensitivity, specificity, accuracy, kappa, and area under the receiver operating characteristic (AUROC) curve. The concepts and definitions of these metric predictions have been fully reviewed in Rahmati et al. (2018). The outcome of a modeling in the machine learning techniques is a cross-table or confusion matrix involving four types of possible outcomes which are true positive (TP), true negative (TN), false positive (FP), and false negative (FN) (Althuwaynee et al. 2014). The abovementioned criteria are obtained as:
where Xobs is the value observed; Xest is the value estimated using the four groundwater potential models. PC is the proportion of number of pixels that are correctly classified as groundwater well or non-groundwater well and is computed as (TP / TN)/total number of pixels. Pexp is the expected agreement and is calculated as ((TP + FN) + (TP + FP) + (FP + TN) + (FN + TN) /Sqrt (total number of training pixels).
3.4.2 Receiver Operating Characteristic Curve (ROC)
The ROC curve is an off use technique to identify the reliability and quality of deterministic and probabilistic models (Swets 1988) and also for the validation of accuracy of groundwater potential map (Pradhan 2013). In the ROC curve, the sensitivity of a model is plotted against 1-specificity. The ROC curve can be plotted according to the existing events (groundwater wells) defined as success rate curve (SRC). Additionally, it would be defined as a prediction rate curve (PRC) for events that will possibly occur in the future.
What is remarkable in the ROC excavation is the area under the ROC curve (AUROC). AUROC is the best mensuration component in the ROC analysis (Simpson and Fitter 1973). It has been considered as a standard and general indicator to perform a test (Walter 2002). It ranges between 0 and 1, so that if AUROC is closer to 1, the ability of prediction accuracy of the model increases; therefore, a perfect forecast gives an area of 1 (Centor and Keightley 1989). Overall, if the AUROC value is greater than 0.8, the performance of the groundwater model is appropriate. AUROC was computed as:
(Yesilnacar 2005) declared that if the value of AUROC ranges 0.5–0.6, 0.6–0.7, 0.7–0.8, 0.8–0.9, and 0.9–1, the prediction accuracy of a quantitative–qualitative model is poor, average, good, very good, and excellent, respectively.
3.4.3 Statistical Analysis
Since a new model is introduced, it is first better to evaluate it based on parametric and non-parametric statistical procedures (Bui et al. 2012). In this study, Friedman test (Friedman 1937) as a non-parametric statistical test was considered to validate a new model and to compare it with two or more models (Beasley and Zumbo 2003). It is first assumed that there is no difference between the performances of the models at the significance level of 0.05. This hypothesis is either rejected or accepted when p (value) of the test is less or more than 0.05, respectively (Bui et al. 2015). Of course, if the significance level of this test for all models is less than 0.05, the results cannot be interpreted. In this case, Freidman test is not a proper approach to compare models (Bui et al. 2015). Therefore, the models must be compared as pairwise. Eventually, Wilcoxon signed-rank test is applied to statistically assess differences between the models. The null hypothesis is similar to Friedman test. Moreover, the performance of groundwater potential models is different when Sig < 0.05 and z-value is more than the critical values of z (−1.96 and + 1.96) (Bui et al. 2015).
4 Background of Methods Used
4.1 Logistic Regression (LR)
Logistic regression which is a statistical model for creating a relationship between dependent and independent variables (Shahabi et al. 2015), was used in this study for the prediction of presence or absence of groundwater in relation to a set of conditioning factors (Nampak et al. 2014). Logistic regression model can give a relationship between the logistic function f(z) and the potential groundwater which can be expressed as:
Z factor can be computed using the following equation:
where P is the probability of an event (potential groundwater) occurrence, Z is the linear logistic factor that is erratic from -∞ to +∞. It ranges between 0 and 1 such that the closer to 1, the higher the probability of occurrence of the event will be and vice versa. b0 is the constant coefficient of the model, n is the number of independent variables, bi (i = 1, 2, 3, ..., n) is coefficient of the logistic regression model, and xi (i = 1, 2, 3,..., n) is the independent variable or conditioning factor.
4.2 Random Forest (RF) Classifier
Random Forest (RF) is a powerful machine learning algorithm for classification (Rodriguez-Galiano et al. 2015). RF was first created by Ho (1998), and then expanded by Breiman in 2001 (Breiman 2001; Ho 1998; Miao and Wang 2015; Micheletti et al. 2014). The RF model is a compound of many decision trees in which each tree is a set of multiple bootstrap samples constructed by original samples called bagging (Miao and Wang 2015) creating numerous values of training data by randomly resampling the original dataset with replacement (Rodriguez-Galiano et al. 2015). Bagging develops a variety of trees by performing different training data subsets to avoid the correlation between different trees (Rodriguez-Galiano et al. 2015). Additionally, about one-third of all samples are determined as out-of-bag (OOB) error and they are used for validation of data set (Rahmati et al. 2016). The OOB error is an unbiased estimate of the generalization error that gives an estimate of important variables (Micheletti et al. 2014; Rahmati et al. 2016). Moreover, it can obtain the variance and covariance between grid cells (Kuhnert et al. 2010). Each individual tree among the forest will be constructed on a bootstrap sample in which at each node a subset of features is selected. After splitting nodes according to the Gini Impurity (Criminisi and Shotton 2013), the last node is converted to leaves with a number of samples. For tree of each class, the posterior probabilities (Pt(C| f) are then calculated as:
The posterior probability (Pt(C| f) is the probability that a selected case belongs to class Ci of the training dataset f. There are some advantages of random forest classifier, such as (i) low computational cost, (ii) powerful performance in large data, (iii) performing many input features without feature elimination, (iv) determining the most important variables in classification, (v) identifying the relationship between variables and classification, and (vi) avoiding over-fitting (Rahmati et al. 2015).
4.3 Naïve Bayes (NB) Classifier
One of the main goals of decision tree is to create a suitable model tree for describing the relationship between predictive and class variables (Wang et al. 2006). Naïve Bayesian (NB) classifier is a probabilistic graphical model for classification (Farid et al. 2014). It works based on the Bayes theorem which, in turn, is based on independent distribution and discretization of continuous attribute values by constructing a probability curve for each class in the dataset (Farid et al. 2014). NB has some advantages such as it is fast to train and classify, very simple and easy to understand, very strong to irrelevant features, and requires a small amount of training dataset for classification. Therefore, this model helps predict the future results based on the probabilities of observations from past observations and finding the state of query feature among other variables in the dataset (Ho 1998). There are some steps for performing the NB model. The first step is the collection of data, followed by estimating the probability and mean for each class, creating variance and covariance matrix, and constructing the discriminant function for each class (Ho 1998; Pham et al. 2015).
If x (x1, x2, …xn) is the twelve vector of the conditioning factors and y (y1, y2) is the vector of the classifier variables (well, non-well), the NB classifier will be computed as follow:
where P(yi) is the prior probability of yi which can be estimated based on the proportion of the observed cases with output class yi in the training dataset, and P(xi, yi) is the conditional probability which can be calculated as:
where η and α are the mean and standard deviation, respectively.
4.4 Random Subspace (RS)
Random Subspace is an ensemble learning technique first developed by Ho (1998). It is known as an efficient ensemble technique in which multiple classifiers are combined, trained, and performed on the modified feature space (Pham et al. 2017). It generates sub-training for training base classifiers. As an advantage, different samples on feature space are applied instead of the instance space (Skurichina and Duin 2002).
Considering each training object Xi(i = 1, 2, …, n) in the training dataset, X = (X1, X2, …, Xn) is a p-dimensional vector, Xi = (Xi1, Xi2, …, Xip). In this method, from the p-dimensional dataset X, one randomly chooses r < p. In this way, r-dimensional RS from the p-dimensional feature space can be obtained. The modified training dataset ˜b = (˜b1, ˜b2, …, ˜bn) comprises of r-dimensional training objects ˜b = (˜bi1, ˜bi2, …, ˜bir), (i = 1, 2, …, n) is achieved where r-components xbij(j = 1, 2, …, r) are randomly selected from p-components xij(j = 1, 2, …, p) of the training vector, Xi. Classifiers are ultimately constructed in the random subspaces ˜b and combined by the majority voting using:
where δi, j is the Kronecker symbol, and y ∈ {−1, 1} is a decision (well and non-well) of the classifier.
4.5 Novel Hybrid Approach of RS-RF for Groundwater Potential Assessment
This paper attempts to introduce a novel classifier ensemble method, namely random subspace based on Random Forest (RS-RF), in order to enhance the prediction accuracy of a base classifier and groundwater potential mapping. The main aim of ensemble modeling is to build an effective method by integrating multiple outputs from a set of models (Rokach 2005). Therefore, an ensemble model can make the decision easier with further increase in accuracy and reliability. The framework of this technique is shown briefly in Fig. 3. It can be constructed by five main steps, (i) data collection and interpretation, (ii) dataset preparation, (iii) random subspace (RS) ensemble construction, (iv) random forest (RF) algorithm construction, and (v) RS-RF model construction.
-
i.
Data collection and interpretation: data has been collected from various sources including Google Earth images; available thematic maps, meteorological data, and groundwater location reports.
-
ii.
Dataset preparation: 70% (33 locations) and 30% (15 locations) of groundwater well locations were used to generate training and validation datasets, respectively. In addition to groundwater well locations, non-groundwater well locations were randomly considered to construct datasets. The groundwater and non-groundwater well locations were converted to pixels (20 × 20 m) to overlay with conditioning factors to construct the final dataset.
-
iii.
Meta classifier ensemble: Random subspace ensemble was constructed for each sub-training dataset. Optimal sub-training was generated after training the random subspace ensemble. These sub-training datasets were then used to train a base classifier, namely random forest (RF). Finally, the RS-RF model was constructed using a combination of all sub-training based on the RS.
-
iv.
Base classifier: Random forest (RF) algorithm was used as a base classifier for each sub-training dataset to generate groundwater well potential mapping.
-
v.
The proposed model is a novel classifier ensemble method constructed by a combination of random subspace ensemble and random forest algorithm classifier (RS-RF).

Novel classifier ensemble of random subspace based on random forest (RS-RF) model framework used in this study
5 Results and Discussion
5.1 Selection of the Most Significant Groundwater Conditioning Factors
The selection of the most important affecting factors for groundwater potential mapping (GWPM) using the LSSVM method are shown in Fig. 4. These results show that factors with higher weights were more important to groundwater models than others. It could be observed that TWI had the highest predictive capability for groundwater models (Average Merit (AM) = 10.89). River density factor was ranked as the second among the affecting factors with AM = 10.2, and also slope angle had a remarkable contribution to groundwater models (AM = 7.32). Other factors, such as curvature (AM = 6.32), elevation (AM = 6.12), lithology (AM = 6.02), rainfall (AM = 5.86), and NDVI (AM = 5.63) held almost the same predictive capability for groundwater models. Land use (AM = 5.02), aspect (AM = 4.32), and SPI (AM = 3.2) showed low predictive capabilities, and fault density (AM = 2.1) had the lowest contribution to groundwater models. These results imply that since all twelve groundwater affecting factors had AM >0, they were considered for building groundwater potential models in the present study.

Prediction capability of the twelve groundwater conditioning factors
5.2 Training the RS-RF Model and Validation
The four groundwater potential models were evaluated by criteria that were extracted from the confusion matrix, including sensitivity, specificity, accuracy, kappa, RMSE and AUROC. Table 1 shows the performance of RS-RF model for training and validation datasets. The results, according to the value of sensitivity for training (93.9%) and validation (86.7%) datasets, indicated that the new hybrid model was acceptable; while, the values of this criterion were, 90.9%, 87.9 and 69.7%, respectively, for the RF, LR and NB models in the training dataset and were 80%, 81.3 and 75%, respectively, in the validation dataset (Table 2).
Table 2 shows that in training and validation datasets, the specificity of the new model had the values of 91.4 and 92.3%, respectively. This index was 87.9% for RF, 87.9% for LR, and 90.9% for NB in the training dataset; while, in the validation dataset, it was 84.6%, 84.6 and 83.3%, respectively. The RS-RF had the highest accuracy in training (92.6%) and validation (89.3%) datasets, indicating that 92.6 and 89.3% of groundwater well and non-groundwater well pixels had been correctly classified, followed by RF (89.4%), LR (87.9%) and NB (80.3%) models for training and 82.1%, 82.8%, and 78.6% for validation datasets, respectively (Table 2).
The results indicated that the RS-RF model in training (0.792) and validation (0.689) datasets had the highest value of kappa index, followed by RF (0.754), LR (0.754) and NB (0.702) in the training dataset and 0.658, 0.678 and 0.632 in the validation dataset, respectively (Table 2). The results of this section revealed that all models showed substantial agreement between observed and predicted locations of groundwater wells.
The RMSE values for training and validation datasets were 0.380 and 0.397, respectively. The RF, LR, and NB models were ranked thereafter, since they obtained 0.410, 0.418, and 0.486 for the training dataset, and 0.439, 0.449 and 0.466 for the validation dataset, respectively, indicating that the introduced model showed a higher performance (Table 2).
The results demonstrated that AUROC of the new model for the training dataset was 0.995, followed by the RF (0.929), LR (0.947) and NB (0.891) models. However, in the validation dataset AUROC was 0.878, ranked before the RF (0.809), LR (0.825) and NB (0.800) models.
Overall, comparison of models showed that in the training and validation datasets, the new proposed hybrid model (RS-RF) had the highest performance in terms of sensitivity, specificity, accuracy, kappa and AUROC, followed by the LR, the RF and the NB models. Therefore, it can be concluded that this new model had a higher capability for preparing the groundwater well potential mapping than the other state-of-the-art benchmark machine learning models used in this study.
5.3 Preparing Groundwater Potential Mapping
Preparation of groundwater potential maps is one of the most important key elements of groundwater modeling studies; hence, maps were constructed after training and validation in two main steps. The first was the generation of groundwater potential indices for all pixels of the study area, and the second was the reclassification of these indices according to the natural break method. Groundwater potential classes were reclassified into five categories with respect to susceptible index intervals as very low (0 – 0.106), low (0.106 – 0.298), moderate (0.298 – 0.537), high (0.537 – 0.787), and very high (0.787 – 0.999). All groundwater potential maps are shown in Fig. 5.


Groundwater potential maps derived from a RS-RF, b RF, c LR, and d NB
It can be observed that the very high class had the largest area (44.6%), followed by high (32.78%), moderate (16.85%), low (5.196%), and very low (0.564%), respectively. Obviously, the groundwater potential map using the RS-RF model indicated very good performance, since highest and lowest numbers of wells were located in areas with very high (29.787) and very low potential (2.127), followed by high (23.404) and low (14.893) classes, respectively.
ROC curves of all groundwater potential models were prepared for each map in both the training dataset (for success rate curve) and the testing dataset (for prediction rate curve). The results of ROC and AUC of the four groundwater potential maps are shown in Fig. 6. The success rate curve varied between 0.718 to 0.612, indicating that all four studied models had suitable prediction capabilities. The highest prediction capability was provided by the RS-RF model with AUROC equal to 0.718 in the training dataset, followed by LR (0.687), RF (0.643), and NB (0.612). It can also be observed that the RS-RF model had the highest AUROC value (0.714) in the testing dataset; while, LR (0.686), RF (0.635), and NB (0.610) were ranked thereafter.

Comparison of groundwater well susceptibility models using ROC curve technique, a Success rate curve, and b Prediction rate curve
These outcomes also pointed out that RS-RF had the highest predictive capability among other groundwater potential models in both success and prediction rate curves. In addition to the AUROC, the well density (WD) was applied to the new hybrid model to more appropriately evaluate groundwater potential mapping (Table 3). The WD was obtained by overlaying groundwater well potential maps with the location of wells. The amount of WD significantly increased from “very low” class (WD = 0.265) to “very high” class (WD = 1.497).
The four groundwater models were finally assessed using Friedman test at the 5% significant level to answer the question whether or not there was a statistically significant difference among them. The results showed that the null hypothesis was rejected because the Sig. factor was less than 0.05. Even though Friedman test was able to determine significant differences among models, it was unable to recognize which model made this difference. Thus, to better depict the systematic pairwise differences, Wilcoxon signed-rank test was used (Table 4). The Sig <0.05 and Z-value higher than the critical value (−1.96 and + 1.96) revealed that the new hybrid model (RF-RS) had a statistical significant difference with other groundwater well models. Overall, the RS-RF model outperformed the RF, LR, and NB models for purposes of this study.
6 Conclusion
The main objective of this study was to present a new artificial intelligent approach which is a hybrid of random subspace and random forest (RS-RF) for mapping groundwater potential. Twelve conditioning factors were selected for groundwater analysis of the aquifer of Qorveh–Dehgolan plain in the west of Iran based on LSSVM. Proper selection of these twelve factors increased the accuracy of groundwater well mapping by reducing noise and over-fitting for the training dataset. This implies that the selected factors are very suitable for groundwater potential mapping in the study area which might be appropriate in similar areas as well. To state the efficiency of the new hybrid model, three state-of-the-art soft computing benchmark models, including random forest (RF), logistic regression (LR) and naïve bayes (NB), were utilized for comparison. These comparisons were made using commonly criteria, including sensitivity, specificity, accuracy, kappa, RMSE and area under the ROC curve. The prediction capability of groundwater potential maps was validated and compared using the success rate and predictive rate curves. This study revealed that random subspace significantly improved the performance of single random forest such that among all 4 models studied for groundwater potential mapping, the new hybrid model performed by far better than LR, RF, and NB.
The RS-RF hybrid model would be a promising technique that can appropriately be used for groundwater potential mapping which means it can accurately recognize the area with higher potential of groundwater at the study area and in similar regions, maybe with caution. This methodology would suggest farmers to find suitable places for digging wells to avoid spending a great deal of money. In addition, the groundwater potential map can be useful to water managers for making proper decisions on the optimal use of groundwater resources for future planning specifically in arid and semi-arid climates such as the study area.
References
Aguilar C, Zinnert JC, Polo MJ, Young DR (2012) NDVI as an indicator for changes in water availability to woody vegetation. Ecol Indic 23:290–300
Al Saud M (2010) Mapping potential areas for groundwater storage in Wadi Aurnah Basin, western Arabian peninsula, using remote sensing and geographic information system techniques. Hydrogeol J 18:1481–1495
Alavi M (1994) Tectonics of the Zagros orogenic belt of Iran: new data and interpretations. Tectonophysics 229:211–238
Althuwaynee OF, Pradhan B, Park H-J, Lee JH (2014) A novel ensemble decision tree-based CHi-squared automatic interaction detection (CHAID) and multivariate logistic regression models in landslide susceptibility mapping. Landslides 11:1063–1078
Beasley TM, Zumbo BD (2003) Comparison of aligned Friedman rank and parametric methods for testing interactions in split-plot designs. Comput Stat Data Anal 42:569–593
Breiman L (2001) Random forests. Mach Learn 45:5–32
Bui DT, Pradhan B, Lofman O, Revhaug I, Dick OB (2012) Spatial prediction of landslide hazards in Hoa Binh province (Vietnam): a comparative assessment of the efficacy of evidential belief functions and fuzzy logic models. Catena 96:28–40
Bui DT, Pradhan B, Revhaug I, Nguyen DB, Pham HV, Bui QN (2015) A novel hybrid evidential belief function-based fuzzy logic model in spatial prediction of rainfall-induced shallow landslides in the Lang Son city area (Vietnam). Geomat Nat Haz Risk 6:243–271
Centor R, Keightley G (1989) Receiver Operating Characteristics (ROC) curve area analysis using the ROC ANALYZER. In: Proceedings/the... Annual Symposium on Computer Application [sic] in Medical Care. Symposium on Computer Applications in Medical Care. American Medical Informatics Association, p 222-226
Chapi K, Rudra RP, Ahmed SI, Khan AA, Gharabaghi B, Dickinson WT, Goel PK (2015) Spatial-temporal dynamics of runoff generation areas in a small agricultural watershed in southern Ontario. J Water Resour Protect 7:14–40
Chenini I, Mammou AB, El May M (2010) Groundwater recharge zone mapping using GIS-based multi-criteria analysis: a case study in Central Tunisia (Maknassy Basin). Water Resour Manag 24:921–939
Chowdhury A, Jha MK, Chowdary V (2010) Delineation of groundwater recharge zones and identification of artificial recharge sites in West Medinipur district, West Bengal, using RS, GIS and MCDM techniques. Environ Earth Sci 59:1209–1222
Chung C-JF, Fabbri AG (1993) The representation of geoscience information for data integration. Nonrenewable Resources 2:122–139
Criminisi A, Shotton J (2013) Decision forests for computer vision and medical image analysis. Springer Science & Business Media, Berlin
Dar IA, Sankar K, Dar MA (2010) Remote sensing technology and geographic information system modeling: an integrated approach towards the mapping of groundwater potential zones in Hardrock terrain, Mamundiyar basin. J Hydrol 394:285–295
Devi PS, Srinivasulu S, Raju KK (2001) Hydrogeomorphological and groundwater prospects of the Pageru river basin by using remote sensing data. Environ Geol 40:1088–1094
Dinesh Kumar P, Gopinath G, Seralathan P (2007) Application of remote sensing and GIS for the demarcation of groundwater potential zones of a river basin in Kerala, southwest coast of India. Int J Remote Sens 28:5583–5601
Dubois D, Prade H (1990) Rough fuzzy sets and fuzzy rough sets. Int J Gen Syst 17:191–209
Falah F, Ghorbani Nejad S, Rahmati O, Daneshfar M, Zeinivand H (2017) Applicability of generalized additive model in groundwater potential modelling and comparison its performance by bivariate statistical methods. Geocarto Int 32:1069–1089
Farid DM, Zhang L, Rahman CM, Hossain MA, Strachan R (2014) Hybrid decision tree and naïve Bayes classifiers for multi-class classification tasks. Expert Syst Appl 41:1937–1946
Friedman M (1937) The use of ranks to avoid the assumption of normality implicit in the analysis of variance. J Am Stat Assoc 32:675–701
Fu B, Burgher I (2015) Riparian vegetation NDVI dynamics and its relationship with climate, surface water and groundwater. J Arid Environ 113:59–68
Golkarian A, Naghibi SA, Kalantar B, Pradhan B (2018) Groundwater potential mapping using C5. 0, random forest, and multivariate adaptive regression spline models in GIS. Environ Monit Assess 190:149
Guyon I, Elisseeff A (2003) An introduction to variable and feature selection. J Mach Learn Res 3:1157–1182
Ho TK (1998) The random subspace method for constructing decision forests. IEEE Trans Pattern Anal Mach Intell 20:832–844
Jha MK, Chowdhury A, Chowdary V, Peiffer S (2007) Groundwater management and development by integrated remote sensing and geographic information systems: prospects and constraints. Water Resour Manag 21:427–467
Kononenko I (1994) Estimating attributes: analysis and extensions of RELIEF. In: European conference on machine learning. Springer, p 171-182
Kuhnert PM, Martin TG, Griffiths SP (2010) A guide to eliciting and using expert knowledge in Bayesian ecological models. Ecol Lett 13:900–914
Lian C, Zeng Z, Yao W, Tang H (2014) Ensemble of extreme learning machine for landslide displacement prediction based on time series analysis. Neural Comput & Applic 24:99–107
Mair A, El-Kadi AI (2013) Logistic regression modeling to assess groundwater vulnerability to contamination in Hawaii, USA. J Contam Hydrol 153:1–23
Manap MA, Sulaiman WNA, Ramli MF, Pradhan B, Surip N (2013) A knowledge-driven GIS modeling technique for groundwater potential mapping at the upper Langat Basin, Malaysia. Arab J Geosci 6:1621–1637
Manap MA, Nampak H, Pradhan B, Lee S, Sulaiman WNA, Ramli MF (2014) Application of probabilistic-based frequency ratio model in groundwater potential mapping using remote sensing data and GIS. Arab J Geosci 7:711–724
Miao T, Wang M (2015) Susceptibility analysis of earthquake-induced landslide using random forest method
Micheletti N, Foresti L, Robert S, Leuenberger M, Pedrazzini A, Jaboyedoff M, Kanevski M (2014) Machine learning feature selection methods for landslide susceptibility mapping. Math Geosci 46:33–57
Moore ID, Wilson JP (1992) Length-slope factors for the revised universal soil loss equation: simplified method of estimation. J Soil Water Conserv 47:423–428
Moore ID, Grayson R, Ladson A (1991) Digital terrain modelling: a review of hydrological, geomorphological, and biological applications. Hydrol Process 5:3–30
Naghibi SA, Pourghasemi HR, Pourtaghi ZS, Rezaei A (2015) Groundwater qanat potential mapping using frequency ratio and Shannon’s entropy models in the Moghan watershed, Iran. Earth Sci Inf 8:171–186
Nampak H, Pradhan B, Manap MA (2014) Application of GIS based data driven evidential belief function model to predict groundwater potential zonation. J Hydrol 513:283–300
Neshat A, Pradhan B, Pirasteh S, Shafri HZM (2014) Estimating groundwater vulnerability to pollution using a modified DRASTIC model in the Kerman agricultural area, Iran. Environ Earth Sci 71:3119–3131
Oh H-J, Kim Y-S, Choi J-K, Park E, Lee S (2011) GIS mapping of regional probabilistic groundwater potential in the area of Pohang City, Korea. J Hydrol 399:158–172
Oikonomidis D, Dimogianni S, Kazakis N, Voudouris K (2015) A GIS/remote sensing-based methodology for groundwater potentiality assessment in Tirnavos area, Greece. J Hydrol 525:197–208
Osati K, Koeniger P, Salajegheh A, Mahdavi M, Chapi K, Malekian A (2014) Spatiotemporal patterns of stable isotopes and hydrochemistry in springs and river flow of the upper Karkheh River basin, Iran. Isot Environ Health Stud 50:169–183
Petus C, Lewis M, White D (2012) Using MODIS Normalized Difference Vegetation Index to monitor seasonal and inter-annual dynamics of wetland vegetation in the Great Artesian Basin: a baseline for assessment of future changes in a unique ecosystem. In: International Society for Photogrammetry and Remote Sensing
Pham BT, Tien Bui D, Indra P, Dholakia M (2015) A comparison study of predictive ability of support vector machines and naive bayes tree methods in landslide susceptibility assessment at an area between Tehri Garhwal and Pauri Garhwal, Uttarakhand state (India) using GIS. In: national symposium on geomatics for digital India and annual conventions of ISG & ISRS, Jaipur (India)
Pham BT, Bui DT, Prakash I, Dholakia M (2017) Hybrid integration of multilayer perceptron neural networks and machine learning ensembles for landslide susceptibility assessment at Himalayan area (India) using GIS. Catena 149:52–63
Pradhan B (2013) A comparative study on the predictive ability of the decision tree, support vector machine and neuro-fuzzy models in landslide susceptibility mapping using GIS. Comput Geosci 51:350–365
Quinlan JR (1996) Improved use of continuous attributes in C4. 5. J Artif Intell Res 4:77–90
Rahmati O (2013) An investigation of quantitative zonation and groundwater potential (case study: Ghorveh-Dehgolan plain). M. Sc. thesis, Tehran University
Rahmati O, Samani AN, Mahdavi M, Pourghasemi HR, Zeinivand H (2015) Groundwater potential mapping at Kurdistan region of Iran using analytic hierarchy process and GIS. Arab J Geosci 8:7059–7071
Rahmati O, Pourghasemi HR, Melesse AM (2016) Application of GIS-based data driven random forest and maximum entropy models for groundwater potential mapping: a case study at Mehran region, Iran. Catena 137:360–372
Rahmati O, Naghibi SA, Shahabi H, Bui DT, Pradhan B, Azareh A, Rafiei-Sardooi E, Samani AN, Melesse AM (2018) Groundwater spring potential modelling: comprising the capability and robustness of three different modeling approaches. J Hydrol 565:248–261
Rodriguez-Galiano V, Sanchez-Castillo M, Chica-Olmo M, Chica-Rivas M (2015) Machine learning predictive models for mineral prospectivity: an evaluation of neural networks, random forest, regression trees and support vector machines. Ore Geol Rev 71:804–818
Rokach L (2005) Ensemble methods for classifiers. In: Data mining and knowledge discovery handbook. Springer, p 957-980
Shahabi H, Hashim M, Ahmad BB (2015) Remote sensing and GIS-based landslide susceptibility mapping using frequency ratio, logistic regression, and fuzzy logic methods at the central Zab basin, Iran. Environ Earth Sci 73:8647–8668
Shekhar S, Pandey AC (2015) Delineation of groundwater potential zone in hard rock terrain of India using remote sensing, geographical information system (GIS) and analytic hierarchy process (AHP) techniques. Geocarto Int 30:402–421
Shirzadi A, Chapi K, Shahabi H, Solaimani K, Kavian A, Ahmad BB (2017a) Rock fall susceptibility assessment along a mountainous road: an evaluation of bivariate statistic, analytical hierarchy process and frequency ratio. Environ Earth Sci 76:152
Shirzadi A, Bui DT, Pham BT, Solaimani K, Chapi K, Kavian A, Shahabi H, Revhaug I (2017b) Shallow landslide susceptibility assessment using a novel hybrid intelligence approach. Environ Earth Sci 76:60
Simpson AJ, Fitter MJ (1973) What is the best index of detectability? Psychol Bull 80:481–488
Skurichina M, Duin RP (2002) Bagging, boosting and the random subspace method for linear classifiers. Pattern Anal Appl 5:121–135
Suykens JA, Van Gestel T, De Brabanter J (2002) Least squares support vector machines. World Scientific
Swets JA (1988) Measuring the accuracy of diagnostic systems. Science 240:1285–1293
Tahmassebipoor N, Rahmati O, Noormohamadi F, Lee S (2016) Spatial analysis of groundwater potential using weights-of-evidence and evidential belief function models and remote sensing. Arab J Geosci 9:79
Tang X, Ou Z, Su T, Sun H, Zhao P (2005) Robust precise eye location by adaboost and svm techniques. In: International Symposium on Neural Networks. Springer, p 93–98
Tehrany MS, Pradhan B, Jebur MN (2013) Spatial prediction of flood susceptible areas using rule based decision tree (DT) and a novel ensemble bivariate and multivariate statistical models in GIS. J Hydrol 504:69–79
Walter S (2002) Properties of the summary receiver operating characteristic (SROC) curve for diagnostic test data. Stat Med 21:1237–1256
Wang L-M, Li X-L, Cao C-H, Yuan S-M (2006) Combining decision tree and naive Bayes for classification. Knowl-Based Syst 19:511–515
Yesilnacar EK (2005) The application of computational intelligence to landslide susceptibility mapping in Turkey. University of Melbourne, Department, 200
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of Interest
None.
Additional information
Highlights
• A new hybrid machine learning model named RS-RF was introduced for mapping groundwater potential.
• The new model was successfully evaluated and validated compared to the RF, LR, and NB models.
• The new model can be used as a tool for groundwater resources management in semi-arid areas.
Rights and permissions
About this article

Cite this article
Miraki, S., Zanganeh, S.H., Chapi, K. et al. Mapping Groundwater Potential Using a Novel Hybrid Intelligence Approach. Water Resour Manage 33, 281–302 (2019). https://doi.org/10.1007/s11269-018-2102-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11269-018-2102-6