
Abstract
Although limiting shear stress is a common behavior that is observed in many highly loaded lubricated contacts, its physical origins are still a matter of debate. Several scenarios are proposed in the literature to explain the macroscopic manifestations of the shearing response of a thin film of highly pressurized lubricant. Experimental measurements have been taken to capture these scenarios. However, limiting shear stress has never been simultaneously measured to validate any of them. Over the last decade, more and more molecular dynamics simulations have been performed to go further into details that are experimentally unattainable. This paper aims at comparing both approaches to studying the limiting shear stress, and more specifically at experimentally validating a lubricant phase diagram derived from molecular dynamics simulations. It suggests that the physical mechanism that initiates limiting shear stress is shear localization.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction and Context
The friction coefficient, C f is one of the main parameters in tribology, which quantifies friction in a contact. It is macroscopically defined as the ratio of the friction force to the applied normal load. From there, the friction coefficient is representative of “everything happening between two solid bodies in contact with relative motion.”
In the case of elastohydrodynamic lubrication (EHL), this coefficient results from the contribution, in increasing order of importance, of the contacting solid bodies’ deformation, the solid/lubricant interfacial response and the lubricant flow through the contact. Therefore, to model and predict C f properly, one has to consider the contributions of the elastic behavior of the contacting solids, the way the solid/fluid interface responds to the contact stresses and the behavior of the lubricant, which is strongly influenced by the confinement, caused by both the pressure and the very narrow gap between the deformed solids [1, 2] and by its history [3]. Of course, the complexity of friction in highly loaded lubricated contacts is very much exacerbated by the extreme pressure and temperature rise conditions, up to a few GPa [4–6] and locally up to 100 °C [4, 7], respectively. This results in a complex behavior described, by contrast, with a single macroscopic coefficient, C f. Elastohydrodynamic (EHD) friction can be thus considered as resulting from a fully coupled multiphysics problem. From that, the overall contact behavior may involve several regimes, depending on the main influencing physics, which in turn issue from one or more of the three abovementioned contributions. Presumably, these regimes influence the contact overall friction and can be distinguished using traction curves.
Indeed, when the lubricant is subjected to very high contact pressures, the friction coefficient C f first displays a sharp increase at very small slide-to-roll ratio (SRR, ratio of the sliding speed to the mean entrainment speed), commonly and sometimes mistakenly [8] attributed to linear viscous behavior. Then, results from the literature show the onset of a second regime, identified as the shear-thinning regime [or even possibly the limiting shear stress (LSS) regime], when SRR is further increased, with a decreasing slope of the friction curve relative to the first regime. Finally, C f reaches the so-called LSS plateau value. It is experimentally defined in EHL as the shear stress measured in the flow direction becoming independent of the shear rate, for a given temperature, pressure and entrainment speed. This definition is fully consistent with the one given in 1960 by Smith [9], who was the first to attribute the expression of LSS to the situation in the contact zone where an increase in rate of shear produces no increase in shear stress. It is important to note that many assumptions are implicit in that definition: a friction force (or a resisting torque) is actually measured and thus a single shear stress is derived, assuming that the actual flow geometry is well known and every parameter of importance remains constant over this area.
Because of the complexity of the interacting physical processes occurring in a highly loaded lubricated configuration, neither the physical mechanisms behind the LSS, nor the influence of the state of stress in the fluid film on these mechanisms is yet well understood. Indeed, LSS occurs in the shear-thinning regime, which can be accompanied by a significant increase in the first normal stress difference (in the shear plane) [10]. It follows that the maximum shear stress does not necessarily occur in the plane of the shearing motion and, therefore, the LSS that is measured might not be the largest shear stress acting in the liquid. This impedes the establishment of a realistic model of LSS. As an illustration, some authors, such as Habchi et al. [11], were on the one hand able to delineate quantitatively the friction regimes according to the relative values of dimensionless parameters but, on the other hand, were unable to offer new insight into the mechanisms governing the LSS, even if this parameter was explicitly taken into account. In addition, only a few studies [12] have been able to measure properly and independently (e.g., out-of-contact) LSS because of the impossibility of reproducing simultaneously the extreme operating conditions (nanoscale thickness, very high contact pressure and very high shear stress) found in highly loaded lubricated contacts. Furthermore, most of these studies date back to the 1980s and 1990s [13]. The latest, with a rate-independent stress measurement in a rheometer, was reported in 2001 [14] and was the result of extending a shear-thinning measurement to high stress, rather than a deliberate attempt to achieve rate independence. Despite the technological progress, no further experimental advance has been reported since then, probably due to the lack of interest of the classical EHL community on primary measurements of rheological properties.
However, efforts have been made in the literature to take into account the LSS in rheological models based on fluid behavior. Thus, expressions based on Maxwell [6, 15] or Eyring [2] rheological models and including an LSS contribution have been presented. However, they incorporate some significant assumptions that may limit their use. For example, most of them consider isothermal conditions and thus only take into account the pressure dependence of the LSS. Likewise, the model proposed by Zhang and Wen [6, 16] suggests that LSS can be considered as the minimum between the fluid shear strength and the maximum endurable shear stress at the interface. That is, the LSS can originate, whatever its physical origin, from a bulk-like behavior of the lubricant or from an interfacial mechanism. Because the maximum endurable shear stress at the interface is difficult to measure, the authors considered the fluid shear strength as the LSS value. Thus, their results constituted the upper bound estimation of the LSS.
In parallel and over several decades, posttreatment of traction curves has led to some empirical models, derived from curve fitting of results averaged over the Hertzian contact area, thus ignoring the local rheological response features. Therefore, in addition to being inaccurate, the range of validity of these models can be questioned. To our knowledge, only models based on restricted pressure and temperature ranges have been proposed [5, 7, 15, 17–20]. They generally did not take into account any component from the solid’s elasticity, which makes them rather inappropriate for the high-pressure contact cases [16]. This results in a significant lack of relevant tools for friction prediction under extreme conditions.
One possibility to go beyond the existing empirical models and to provide the opportunity to extend their domain of validity is to improve the understanding of the LSS physical origin. Several scenarios have already been suggested in the literature to explain the existence of the LSS, the three main scenarios being the glassy state of the lubricant under very high pressure, shear bands forming in the lubricant film or the occurrence of lubricant slip at the liquid/solid interface. However, although Bair and others [10, 21] observed shear banding in a lubricant flowing through a contact, LSS has not directly been measured in any of these scenarios.
To avoid the abovementioned difficulties, the last 15 years have seen the emergence of studies based on molecular dynamics (MD) simulations of Lennard-Jones fluids subjected to very high pressure and shear. Some of these have provided a mapping of the lubricant behavior through the variation of a load (or stress) parameter versus another parameter representative of shear (velocity or rate) deformation [22]. A recent paper, based on nonequilibrium molecular dynamics (NEMD) simulations, proposes a full menu of the lubricated contact behavior in a pressure–sliding velocity chart [23]. This menu delineates flow regimes of solid, slip and localization on a pressure versus velocity (shear rate) plane. This mapping gathers all of the main scenarios already advanced in the literature to explain the LSS. It should be noted here that MD simulations are obtained by imposing a shear rate, whereas flow in a viscometer and in EHL can be placed into regimes on the basis of stress, not on the basis of rate. This may influence the structure of the fluid, and consequently its response. Moreover, in MD studies, very little attention has been paid to the friction coefficient. Thus, any preferred scenario is suggested to explain the LSS origin, in relation to C f. In addition, no direct link has been drawn between these numerical approaches and experimental measurements. Furthermore, it has to be kept in mind that these mappings only consider normal loading and lubricant shearing, and other parameters are very probably missing, for example, the time dependence of the process. However, for flow times of the order of 10−6 s, time dependence should be one of the main physical effects influencing the lubricant behavior.
Through this discussion, the opportunity is taken from recent advances in MD simulations to shed new light on the LSS physics and to suggest future experimental approaches for establishing a connection with friction. This paper aims at linking the mapping of Lennard-Jones fluids’ behavior (as provided by [23] from NEMD simulations) with experimental results on the LSS previously published. This will help to determine in which flow or deformation regime the LSS initiates, and thus give insight into its physical origin. This would eventually contribute to a proper modeling of EHD contacts operated under extreme conditions of pressure and confinement.
In the first part, based on the existing literature, recent MD studies on the behavior of thin films subjected to very high shear stress (or rate) and very high pressure are detailed. Then, we report a chart describing the full picture of the different scenarios proposed from computations to explain the LSS physical origin. In the second part, some key experimental results aimed at characterizing the LSS are briefly presented. In the last part, the latter are gathered in the chart derived from NEMD simulations. The goal is to compare both approaches to the LSS, computational and experimental, to highlight the main physical processes behind it and, finally, to make recommendations for future work.
2 Molecular Dynamics: A Full Picture of the Lubricant Behavior
2.1 Regimes Experienced by the Lubricant
The MD literature makes available research on the nonlinear behavior of very thin films (i.e., of a limited number of atomic layers), highly sheared between two solid walls under high pressure. Among them, based on the previous work of Heyes et al. [24], Gattinoni et al. [23] provided a full nonequilibrium phase diagram describing the behavior of a confined thin film under very high pressure, which is not easy to achieve experimentally under such extreme conditions. This phase diagram gives a general overview of the different mechanisms or phases occurring within a fluid film subjected to these conditions.
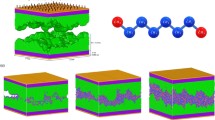
The parameters chosen by Gattinoni et al. to describe the film behavior are the pressure P and the shearing (or sliding) velocity V x ; see Fig. 1. In addition, it should be noted that this chart is parameterized by the wettability, which is taken into account through a modified Lennard-Jones potential. However, to compare this diagram with previous MD results from the literature, only the case of a full film-wall wettability (c = 1) will be considered in this paper. The diagram distinguishes several mechanisms or phase regimes in the film behavior, which are sketched in Fig. 2 in the general case and described hereafter.

Phase diagram from MD simulations computed for a monatomic system, from [23]. c is representative of the interactions between the wall and confined liquid atoms. CL stands for central localization. Shaded areas highlight transition regions between coexisting phases. Dots represent the occurrence of LSS deduced from MD simulations in the literature (green dots from [24] and red dot from [25]) (Color figure online)

Velocity profiles for the different mechanisms or phase regimes experienced by the lubricant. The general case of a lubricated contact is taken, with two parallel surfaces sliding in the same direction. Central localization (CL) is a specific case of shear banding. Similarly, plug flow can be considered as a specific case of shear banding occurring at the walls. Note that in [23], the two surfaces slide in opposite directions. Note also that a particular case of wall slip is called plug slip in [23]
First, it appears that there is a critical pressure, P crit, which only weakly depends on V x . For pressure lower than P crit, the fluid remains in the liquid state, whatever the shearing velocity V x . Beyond P crit, the behavior is more complex, and the fluid successively experiences several nonlinear regimes, depending on V x .
In a second regime, for P > P crit and for low V x , the fluid displays a solid-like behavior, with either a crystal or glassy phase, depending on the fluid’s ability to crystallize in between the two walls. The main parameters influencing this regime are the fluid complexity, which conditions the molecules’ ability to order and more specifically to layer near the walls, and the initial state of the fluid. Crystallization is promoted by a low fluid complexity, a high degree of molecular ordering at the walls and an initially crystallized fluid [22, 26–28]. Regarding fluid complexity, it can be noted here that previous studies have mainly concerned simple Lennard-Jones fluids, which are monatomic systems [22, 23, 29, 30]. Only a few authors have considered a binary mixture model [23, 31, 32], which was originally designed to frustrate crystallization in supercooled liquids. Regarding the fluid’s initial state (representative of its history) and the structure of the walls, their strong influence has already been shown on the liquid/crystal distribution in the fluid film [22]. Butler and Harrowell qualify them as “seeds” of coexistence. However, they concluded from any possible starting configuration that the steady-state shear stress representative of liquid/crystal coexistence was independent of both the wall structure and the fluid initial state as long as one can bypass the kinetic issue posed by the nucleation of either phase.
Then, in a third regime, for intermediate shearing velocity, many authors mention the presence of slip at the boundaries, which seems to appear either within the film between two phases if they are formed, or at the fluid–wall interface, depending on the solid-phase state (amorphous or crystallized). The former case was predicted by Butler and Harrowell [29] in the case of crystal–liquid coexistence due to one ordered and one amorphous wall, whatever the initial state of the fluid. They observed that the shear flow involves intermittent stick–slip motion at the crystal–liquid interface, with the slip accompanied by disordering. The latter case of slip at the glassy fluid/wall interface was predicted for a whole film in an amorphous state, and for very small shear rates [23, 31–33]. Slip takes place in a very thin band of melted fluid at the interface, of the order of a few molecular diameters. In [23, 31], slip occurs at the walls with boundary layers melting, while the amorphous central region acts as a plug, which is why it corresponds to the plug slip (PS) regime in the phase diagram of Fig. 1.
Finally, once slip has occurred, the melted volume grows steadily with the total shear rate [23, 31]. Thus, the slip regime appears as a transition toward the fourth regime, the so-called shear banding regime. It was represented by the term central localization (CL in the phase diagram; see Fig. 1) by Heyes et al. [24] who observed a central localized state in the center of the film in which the shear gradient was localized. Indeed, for higher shearing velocity, either shear banding (i.e., coexistence of liquid and glassy phases) or the coexistence of both a sheared liquid and a deformed crystal has been numerically predicted. In the case of a coexistence between a strained crystal and its shearing melt, the fluid can either behave like a crystalline slab sandwiched between two liquid layers if the walls are amorphous and the fluid is initially crystallized [22–30], or like a crystal growing out from the walls if they are ordered and the fluid is initially amorphous [22, 23]. In both configurations, Butler and Harrowell [22, 29] concluded that the nonequilibrium coexistence is determined by the nonlinear response of the crystal/liquid interface under shear. The case of shear banding occurs if both walls are amorphous and the fluid is initially in a glassy state. Indeed, in this configuration, no spontaneous ordering occurs [22]. Thus, shearing induces a transition between a whole glassy state and a system that separates into one or several fluidized shear bands and unsheared areas [31]. It occurs in the absence of long-range order in either phase, involves a nonlinear response of the bulk phase and lacks the true plateau behavior in the stress–strain rate curve, characteristic of a two-phase coexistence [22]. It has been noted that the shear band is localized close to one of the walls, the global symmetry between the two walls being nevertheless statistically obtained [31].
2.2 Coefficient of Friction
Among the studies previously cited, only a few have reported friction coefficients C f and, a fortiori, discussed its evolution across the different regimes. For monatomic systems, it appears from [23] that C f increases steadily with V x in the liquid state, which is consistent with experimental data. At higher pressure, when the fluid successively experiences solid, plug slip and shear localization regimes, C f follows a rather complex behavior that, in addition, depends on wettability, so deriving a simple tendency becomes rather difficult. However, C f seems to display an overall decrease with V x . Furthermore, the value of C f does not increase with pressure, even the opposite may occur, which contradicts existing phenomenological models based on experimental data [17]. Gattinoni and coworkers locate the maximum traction coefficient in the PS region, close to the PS–CL transition, as a precursor to shear band formation. This maximum value should be representative of the LSS in a highly confined fluid. Typical values are added in Fig. 1: The green dots correspond to the maximum C f values obtained by Heyes et al. [24] in a preliminary study of [23] and belong, as stated in [23], to the PS regime. The red dot in Fig. 1 represents the LSS initiation of an ionic liquid, deduced from Voeltzel et al.’s MD simulations [25]. In the latter study, the LSS appears directly in the shear localization regime. Therefore, no conclusion on the regime in which LSS occurs can be drawn.
For a binary mixture, C f increases sharply with V x when the fluid is in a liquid state, and C f tends to reach a plateau value for the highest V x in the glassy phase. This result is reminiscent of experimentally measured LSS.
2.3 Limits of the MD Full Picture Validity
NEMD provides a full picture of friction mechanisms for highly stressed lubricated contacts, which is not experimentally possible under such extreme conditions. It could be thus considered as a powerful approach for engineering purposes. However, MD findings must be quantitatively validated, so one has to compare them quantitatively with experimental results. In this context, care must be taken, as such a direct comparison can suffer from some limitations.
The first one lies in the orders of magnitude of the quantities used to describe a contact. Indeed, the atomistic modeling is constrained to handle volumes of a few nm3 and time scales of a few ns or less. Thus, fluid films simulated in MD are a few layers of molecules. Such small values lead to the imposition of very high deformation rates to obtain statistics good enough to be representative. Thus, shear velocities numerically imposed are generally several orders of magnitude higher than the experimental values. One may wonder if the dominant physical processes numerically identified within such very thin films subjected to very high shear correspond to the experimental processes.
Another limitation concerns the way the fluid is modeled: In MD simulations, it is often a simple Lennard-Jones liquid, which does not closely represent the complexity of lubricants used in the experimental literature. However, it has been shown that friction and the presence of slip at the boundaries depend on the size of the molecular chains and the number of branchings [34–36].
Furthermore, modeling requires many assumptions, among them the ideal boundary conditions of full wettability and perfectly ordered structure of the walls, often considered in NEMD. However, compared with experiments, these nonrealistic conditions have already been shown to influence highly the overall contact behavior: Savio et al. [36] found that surface nanocharacteristics can be the cause of large variations in the fluid dynamics at the boundary.
All of these limitations and assumptions may lead to NEMD results that sometimes seem contradictory. For example, Varnik et al. [31] predicted wall slip and shear localization for a binary mixture, whereas only a glassy state was found in [23] for such a fluid. Furthermore, Mokshin et al. [30] found a shear-induced crystallization for a one-component system initially in an amorphous state and with amorphous boundary conditions, which contradicts the results of Butler and Harrowell [29]. In addition, it is possible to compare the critical pressure for a solid–liquid transition from previously quoted MD works, taking argon as a reference. Thus, one finds 250 MPa (full wettability) and 400 MPa (poor wettability) from [23], and 148, 50 and 39 MPa from [29–31], respectively, depending on the imposed conditions. This comparison highlights the necessity to take into account more than two parameters (P and V x in the phase diagram of [23]) when describing the lubricant response under severe confinement.
Finally, many open questions are still pending concerning the physics of the different regimes, and specifically shear banding. Indeed, the shear localization regime remains unclear. Further work is still required to answer the questions concerning why bands form, and what their mechanism of formation is. Bair and McCabe [10] observed shear localization inclined at a 20° angle in a pressurized Couette viscometer through a side window provided to view the cylinders during operation. To our knowledge, this orientation has never been numerically considered. Banding is always predicted to occur parallel to the walls; however, this is described as an artifact of the NEMD studies due to the very thin thickness of the fluid film and the streamwise and spanwise periodic boundary conditions [24].
In short, it is now a mandatory step to compare quantitatively, by all means, MD results with experimental results obtained under very high pressure and shear velocity to validate the nonequilibrium phase diagram.
3 Experimental State of the Art
On the experimental side, each regime previously described (namely solidification or glass transition, wall slip and shear localization, either at the walls or in the fluid) has been already cited to explain the origin of the LSS. Experimental measurements have been taken to characterize each of these regimes, intentionally or not.
The first regime previously described assumes a glass transition because of the very high pressure present in a contact. The fluid is supposed to display a solid-like behavior, with a very high shear strength. At a critical level, the shear stress in the fluid reaches its maximum shear strength and the fluid film is plastically deformed [6, 16, 37]. Solid-like behavior was measured in lubricants in static tests, which mostly involved diamond anvil cells [38–40] associated with the ruby fluorescence technique. The fluid is highly pressurized for a long time, which induces the lubricant either to crystallize or to reach an amorphous solid state, depending on the time and rate of pressurization. The occurrence of both crystallization and glass transition is consistent with MD results. Nevertheless, crystallization at steady P and T conditions is a very slow process, which is typically one million times longer than the transit time of the lubricant in gear or ball-bearing contacts [41]. Crystallization is thus not likely to occur in highly loaded EHD contacts. Moreover, actual lubricants are far from being monatomic liquids, which frustrate any crystallization. Furthermore, the lubricant history, related to its initial state, has been found to influence the lubricant solid state (amorphous or crystal), and even the LSS [41]. As the lubricant initial state in contacts is liquid or at most amorphous, crystallization is further discouraged.
The second regime considers that the lubricating film slips at the interface when the shear stress it sustains becomes higher than the “stress capacity” of the bounding surface, to keep the interfacial shear stress at an endurable level [6, 16]. Apparent wall slip was measured thanks to dynamic tests performed on both classical and with impact EHL ball-on-plate apparatus [42–44]. In [43, 44], wall slip was derived from the postmotion of the fluid entrapped by the impact of a ball on a disk. Lubricants were pressurized for approximately as long as in a rolling element bearing contact (milliseconds to microseconds). However, no direct LSS measurement was taken during these experiments, and no information about the lubricant physical state was recorded during the impact. The question of the influence of the dynamics on crystallization could thus not be addressed. Similarly, there is no experimental evidence on the influence of the bounding solids’ nature on wall slip.
The third regime concerns the formation of shear bands inside the confined thin film. One mechanism suggested in the literature is the local heating of the lubricant when subjected to high deformations or rates. It thus becomes warmer than the bounding surfaces, and thermal heterogeneities inside the lubricant film [45] are induced, eventually leading to the emergence of shear bands [10, 45–48]. These bands appear either inside the film or at the solid body–fluid interface if the surface energy is low or if the contact works isothermally [49]. In the latter case, melted bands of finite thickness form at the solid body–fluid interface, and the glassy state of the lubricant leads to a plug flow, which has already been experimentally demonstrated in [50, 51]. However, because of the difficulty in conducting in situ measurements in such narrow gaps, no direct measurement of the thickness of the melted layer has been taken up to now. However, Hron et al. [52] numerically showed that for a fluid with pressure-dependent viscosity, streamlines between parallel plates moving at constant velocity should no longer be parallel. They revealed that shear localization near the walls could be a solution of the velocity profile for high-pressure gradient in the film. To our knowledge, the only direct experimental evidence of shear localization in the literature was provided by Bair and McCabe [10] for bands forming inside the film. They observed shear bands inclined at a 20° angle from the walls. Fracture has also been mentioned a few times in the literature [2, 53, 54], but no direct experimental evidence was given. Likewise, some authors alluded to slip planes [49], which is rather reminiscent of the relative motion of two solid-like bands. Nevertheless, even if refinements were necessary to apprehend better the shear band regime, experimental conclusions are reminiscent of MD results predicting a melted phase developing either at boundaries or in the middle of the film (depending on the wetting parameter, which is rarely clearly provided).
To conclude, results provided by experimental means are usually focused on one specific regime. Up to now, a unified mapping of a thin film behavior over a large range of operating conditions is lacking.
4 Validation of the Full Picture of the Lubricant Behavior
In this part, experimental conditions of mean pressure and shear rate for which solidification, wall slip, plug flow and shear banding occur are reported in the phase diagram in Fig. 3, derived from the phase diagram predicted by MD simulations. Typical velocity profiles characterizing these regimes can be found in Fig. 2. Additional data describing the experiments used to generate Fig. 3 are given in the appendix. Shear rate has been chosen instead of sliding velocity to compare different experimental geometries. However, recall that MD and experimental shear rates differ by several orders of magnitude, which makes a direct quantitative comparison between the two approaches impossible. The experimental occurrence of the regimes described in the previous section is reported in Fig. 3. Green triangles correspond to the solidification of fluids subjected to high pressures [38–40], red squares to the occurrence of wall slip in a dynamic confined flow [43, 44, 55], blue stars to the emergence of a plug flow in a contact [50, 51] and yellow diamonds to the formation of shear bands observed in a contact [10]. This figure also reports, in dashed lines, the transitions between the different regimes as proposed by Gattinoni et al. [23]. Because of the flow conditions in a contact (high velocity, microstructure of the fluid, amorphous initial state of the lubricant, not perfectly ordered walls), the assumption that no crystal can grow is made, in agreement with [31, 49]. From this, slip does not initiate between distinct phases in the fluid but only at the wall, and the third regime of the diagram (after “liquid” and “solid” regimes) is called “wall slip.” In addition, the fourth regime is called “shear banding” to describe the general phenomenon of shear localization in an amorphous phase. The central localization observed in [23] could be considered as a specific case of this regime.

Experimental phase diagram of the behavior of a pressurized thin film flowing in a confined geometry from the literature. Green triangles stand for solidification measurements [38–40]; red squares stand for wall slip measurements [43, 44, 55]; blue stars stand for plug flow measurements [50, 51]; yellow diamonds stand for shear banding measurements [10]; and pink dots stand for direct LSS measurements [4, 5, 56, 57]. Symbols with bold lines stand for measurements on 5P4E [4, 10, 55, 57], with the same shape and color code. Gray dashed lines are the proposed frontiers between the different regimes, inspired by [23] (Color figure online)
At first sight, the phase diagram seems to describe qualitatively the behavior of a thin film in a lubricated contact. Attention can be paid to the plug flow data from [50, 51], for which velocity profiles look like a plug with large area where shear is localized near the walls. Macroscopic slip at the wall thus comes from highly sheared bands on each side of the plug, making these data belong to the shear banding regime. Furthermore, direct LSS measurements have been added to the mapping (pink dots). These values have been extracted from both high-pressure rheometer [4] and tribometer measurements [5, 56, 57]. They correspond to the shear rate at which LSS initiates for a given pressure.
From Fig. 3, direct measurements of LSS suggest that it is reached in the shear banding regime, except for one measurement from [10]. This global trend supports the conclusions of Gattinoni et al. [23] for c = 1, who attributed a peak value of C f to the onset of the shear localization regime, thus corresponding to the plug slip–shear localization transition. They also attributed the decrease in C f next to the peak to the melted phase growing with V x and not directly to a temperature increase, as is often stated in the literature.
However, great care must be taken considering these results. First, many data are indeed missing to validate such a mapping. In particular, some areas of the mapping are free of any experimental data. For example, no glassy state measurements at low shear rates are plotted because of the difficulty in observing this state experimentally and in obtaining accurate results under such low shear rates. Then, this mapping only reproduces the influence of pressure and deformation rate, whereas it is clear that other parameters might influence the lubricant behavior, such as the nature of the lubricant, temperature, wettability and the history of the lubricant. So, the scaling of this mapping could be improved, but a full representation is certainly beyond the scope of this paper.
To limit the influence of these parameters, let us focus on data from the same fluid, 5P4E, which was often used in the limited literature available. These data are highlighted in Fig. 3 with bold symbols. In addition, the temperature should influence the fluid behavior, especially its physical state through the glass transition pressure, which is the pressure at which the fluid behaves like a glassy material, for a given temperature. If a dimensionless pressure is used (by the 5P4E glass transition pressure P g, P g being a function of the sample temperature extrapolated from [9]), LSS always occurs for P/P g(T) ratios close to or higher than 1. This leads to the assumption that the materials must be close to or in the glassy state to reach the LSS. It can be noted here that the diamond in Fig. 3, which does not match very well with the phase diagram, would fit if dimensionless pressure was chosen. Indeed, MCS1218 has a low glass transition pressure (P g of order of 117 MPa at 293.15 K [58], leading to P/P g ≈ 1.2). However, this condition does not seem to be sufficient. Indeed, the pink dots plotted in Fig. 3 correspond to the critical shear rate where LSS occurs. This means that for the same experimental conditions and consequently for the same fluid state a priori, LSS is not reached at lower shear rates. Therefore, the rate of deformation of the fluid plays a role and must be taken into account for a full scaling of the mapping. Because a modification of the fluid behavior occurs for a characteristic loading time higher and lower than its relaxation time, the Weissenberg number seems to be a good candidate to take the deformation rate into account.
5 Conclusion
This paper links recent MD advances and experimental results on LSS, whose physical origins are still not well understood. It validates the mapping of Lennard-Jones fluids’ behavior (provided by [23] from NEMD simulations) with experimental results previously published in the literature. The mapping suggests that the physical mechanism initiating LSS is shear localization. However, many questions remain on the shear localization initiation itself. This is thus a first step for a much better modeling of EHD contacts operated under extreme conditions of pressure and confinement.
Abbreviations
- C f :
-
Friction coefficient
- P :
-
Mean pressure
- P crit :
-
Critical pressure in Gattinoni et al. [23]
- P g :
-
Glass transition pressure
- SRR:
-
Slide-to-roll ratio \(=\Delta U/\bar{U}\)
- T :
-
Temperature
- U i :
-
Velocity of solid i
- ΔU :
-
Sliding speed = U 1 − U 2
- \(\bar{U}\) :
-
Entrainment speed = (U 1 + U 2)/2
- τ :
-
Shear stress
- LSS:
-
Limiting shear stress
- V x :
-
Shearing velocity in Gattinoni et al. [23]
- c :
-
Wall wettability
References
Luengo, G., Schmitt, F.-J., Hill, R., Israelachvili, J.: Thin film rheology and tribology of confined polymer melts: contrasts with bulk properties. Macromolecules 30(8), 2482–2494 (1997)
Briscoe, B., Tabor, D.: Rheology of thin organic films. ASLE Trans. 17(3), 158–165 (1974)
Bair, S., Winer, W.O.: Some observations in high pressure rheology of lubricants. J. Lubr. Technol. 104, 357–364 (1982)
Bair, S., Winer, W.O.: A rheological model for elastohydrodynamic contacts based on primary laboratory data. J. Lubr. Technol. 101, 258–264 (1979)
Bezot, P., Hesse-Bezot, C., Dalmaz, G., Taravel, P., Vergne, P., Berthe, D.: A study of traction in elastohydrodynamic lubrication: experimental and simulated curves for a point contact lubricated by a silicone fluid. Wear 123(1), 13–31 (1988)
Zhang, Y., Wen, S.: An analysis of elastohydrodynamic lubrication with limiting shear stress: part i—theory and solutions. Tribol. Trans. 45(2), 135–144 (2002)
Bair, S., Winer, W.O.: The high pressure high shear stress rheology of liquid lubricants. J. Tribol. (ASME) 114, 1–13 (1992)
Bair, S., Kotzalas, M.: The contribution of roller compliance to elastohydrodynamic traction. Tribol. Trans. 49(2), 218–224 (2006)
Smith, F.W.: Lubricant behavior in concentrated contact—some rheological problems. ASLE Trans. 3(1), 18–25 (1960)
Bair, S., McCabe, C.: A study of mechanical shear bands in liquids at high pressure. Tribol. Int. 37(10), 783–789 (2004)
Habchi, W., Bair, S., Vergne, P.: On friction regimes in quantitative elastohydrodynamics. Tribol. Int. 58, 107–117 (2013)
Bair, S., Winer, W.O.: The high shear stress rheology of liquid lubricants at pressures of 2 to 200 MPa. J. Tribol. 112(2), 246–252 (1990)
Bair, S., Winer, W.O.: A new high pressure, high shear stress viscometer and results for lubricants. Tribol. Trans. 36(4), 721–725 (1993)
Bair, S.: Measurements of real non-Newtonian response for liquid lubricants under moderate pressures. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 215(3), 223–233 (2001)
Johnson, K.L., Tevaarwerk, J.L.: Shear behaviour of elastohydrodynamic oil films. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 356(1685), 215–236 (1977)
Zhang, Y., Wen, S.: An analysis of elastohydrodynamic lubrication with limiting shear stress: part ii—load influence. Tribol. Trans. 45(2), 211–216 (2002)
Gecim, B., Winer, W.O.: Lubricant limiting shear stress effect on EHD film thickness. J. Lubr. Technol. 102, 213–220 (1980)
Briscoe, B.J., Scruton, B., Willis, F.R.: The shear strength of thin lubricant films. Proc. R. Soc. Lond. A Math. Phys. Eng. Sci. 333(1592), 99–114 (1973)
Hoglund, E., Jacobson, B.: Experimental investigation of the shear strength of lubricants subjected to high pressure and temperature. J. Tribol. 108(4), 571–577 (1986)
Wikstrom, V., Hoglund, E.: Investigation of parameters affecting the limiting shear stress–pressure coefficient: a new model incorporating temperature. J. Tribol. 116(3), 612–620 (1994)
Bair, S., Winer, W.O., Distin, K.W.: Experimental investigations into shear localization in an operating EHD contact. Tribol. Ser. 25, 383–388 (1993)
Butler, S., Harrowell, P.: Simulation of the coexistence of a shearing liquid and a strained crystal. J. Chem. Phys. 118(9), 4115–4126 (2003)
Gattinoni, C., Heyes, D.M., Lorenz, C.D., Dini, D.: Traction and nonequilibrium phase behavior of confined sheared liquids at high pressure. Phys. Rev. E 88, 052406 (2013)
Heyes, D.M., Smith, E.R., Dini, D., Spikes, H.A., Zaki, T.A.: Pressure dependence of confined liquid behavior subjected to boundary-driven shear. J. Chem. Phys. 136, 134705 (2012)
Voeltzel, N., Giuliani, A., Fillot, N., Vergne, P., Joly, L.: Nanolubrication by ionic liquids: molecular dynamics simulations reveal an anomalous effective rheology. Phys. Chem. Chem. Phys. 17(35), 23226–23235 (2015)
Horn, R.G., Israelachvili, J.N.: Direct measurement of structural forces between two surfaces in a nonpolar liquid. J. Chem. Phys. 75, 1400–1411 (1981)
Gao, J., Luedtke, W.D., Landman, U.: Layering transitions and dynamics of confined liquid films. Phys. Rev. Lett. 79, 705–708 (1997)
Gao, J., Luedtke, W., Landman, U.: Structure and solvation forces in confined films: linear and branched alkanes. J. Chem. Phys. 106, 4309–4318 (1997)
Butler, S., Harrowell, P.: Structure and stability of the interface between a strained crystal and a shearing liquid. Phys. Rev. E 67, 051503 (2003)
Mokshin, A.V., Barrat, J.-L.: Shear-induced crystallization of an amorphous system. Phys. Rev. E 77, 021505 (2008)
Varnik, F., Bocquet, L., Barrat, J.-L., Berthier, L.: Shear localization in a model glass. Phys. Rev. Lett. 90, 095702 (2003)
Gee, M.L., McGuiggan, P.M., Israelachvili, J.N., Homola, A.M.: Liquid to solid like transitions of molecularly thin films under shear. J. Chem. Phys. 93, 1895–1906 (1990)
Pignon, F., Magnin, A., Piau, J.-M.: Thixotropic colloidal suspensions and flow curves with minimum: identification of flow regimes and rheometric consequences. J. Rheol. 40(4), 573–587 (1996)
Jabbarzadeh, A., Atkinson, J.D., Tanner, R.I.: The effect of branching on slip and rheological properties of lubricants in molecular dynamics simulation of couette shear flow. Tribol. Int. 35, 35–46 (2002)
Priezjev, N.V., Troian, S.M.: Molecular origin and dynamic behavior of slip in sheared polymer films. Phys. Rev. Lett. 92, 018302 (2004)
Savio, D., Fillot, N., Vergne, P.: A molecular dynamics study of the transition from ultra-thin film lubrication toward local film breakdown. Tribol. Lett. 50(2), 207–220 (2013)
Johnson, K.L., Tevaarwerk, J.L.: Shear behavior of elastohydrodynamic oil films. Proc. R. Soc. Lond. A 356, 215–236 (1977)
Li, F., Cui, Q., Cui, T., He, Z., Zhou, Q., Zou, G.: In situ Brillouin scattering study of water in high pressure and high temperature conditions. J. Phys. Condens. Matter 19, 425205 (2007)
Klotz, S., Chervin, J.-C., Munsch, P., Marchand, G.L.: Hydrostatic limits of 11 pressure transmitting media. J. Phys. D Appl. Phys. 42, 075413 (2009)
Nakamura, Y., Takimoto, A., Matsui, M.: Rheological study of solidified lubricant oils under very high pressure by observing microsphere deformation and viscosity prediction. Lubr. Sci. 22, 417–429 (2010)
Winer, W.O., Sandborn, D.M.: Surface temperature and glassy state investigation in tribology. Part I. NASA contractor Report 3031 (1978)
Kaneta, M., Nishikawa, H., Kameishi, K.: Observation of wall slips in elastohydrodynamic lubrication. J. Tribol. 112(3), 447–452 (1990)
Guo, F., Li, X., Wong, P.: A novel approach to measure slip-length of thin lubricant films under high pressures. Tribol. Int. 46, 22–29 (2012)
Li, X., Guo, F., Wong, P.: Shear rate and pressure effects on boundary slippage in highly stressed contacts. Tribol. Int. 59, 147–153 (2013)
Chang, L.: On the shear bands and shear localizations in elastohydrodynamic lubrication films. J. Tribol. 127(1), 245–247 (2005)
Plint, M.A.: Traction in elastohydrodynamic contact. Proc. Inst. Mech. Eng. Lond. Part 1 182(14), 300–306 (1967)
Bair, S., Qureshi, F., Winer, W.: Observations of shear localization in liquid lubricants under pressure. J. Tribol. 115, 507–514 (1993)
Laplant, F., Hutchinson, E., Ben-Amotz, D.: Raman measurements of localized pressure variations in lubricants above the glass transition pressure. J. Tribol. 119, 817–822 (1997)
Jacobson, B.O.: Rheology and elastohydrodynamic lubrication. Tribol. Ser. 19, 55 (1991)
Ponjavic, A., di Mare, L., Wong, J.S.S.: Effect of pressure on the flow behavior of polybutene. J. Polym. Sci. Part B Polym. Phys. 52, 708–715 (2014)
Sperka, P., Krupka, I., Hartl, M.: Evidence of plug flow in rolling-sliding elastohydrodynamic contact. Tribol. Lett. 54, 151–160 (2014)
Hron, J., Malek, J., Rajagopal, K.R.: Simple flows of fluids with pressure-dependent viscosities. Proc. R. Soc. Lond. A 457, 1603–1622 (2001)
Ehret, P., Dowson, D., Taylor, C.M.: On lubricant transport conditions in elastohydrodynamic conjunctions. Proc. R. Soc. Lond. A 454, 763–787 (1998)
Eastwood A., Harrisson G.: Non-newtonian viscosity at high stresses. In: Proceedings of VIII International Congress Rheology 199 (1980)
Wong, P., Li, X., Guo, F.: Evidence of lubricant slip on steel surface in EHL contact. Tribol. Int. 61, 116–119 (2013)
Habchi, W., Vergne, P., Bair, S., Andersson, O., Eyheramendy, D., Morales-Espejel, G.: Influence of pressure and temperature dependence of thermal properties of a lubricant on the behaviour of circular TEHD contacts. Tribol. Int. 43, 1842–1850 (2010)
Evans, C.R., Johnson, K.L.: The rheological properties of elastohydrodynamic lubricants. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. 200, 303–312 (1986)
Alsaad, M.A.: Light scattering study of the glass transition and the glassy state in lubricated oils. Ph.D. thesis, Georgia Institute of Technology (1976)
Acknowledgments
The authors are very grateful to Dr. Scott Bair, from the Georgia Institute of Technology (Atlanta, USA), for his great interest in the topic and his ongoing encouragement, which have substantially contributed to this discussion. They also wish to thank the SKF Company for its support through the Research Chair “Lubricated Interfaces for the Future” signed with LaMCoS and the INSA Lyon Foundation.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
Tables 1, 2 and 3 present the types of experiments as well as various system parameters that were used to generate Fig. 3. These tables contain synthetic data, when available, that could influence lubricated friction.
Rights and permissions
About this article

Cite this article
Martinie, L., Vergne, P. Lubrication at Extreme Conditions: A Discussion About the Limiting Shear Stress Concept. Tribol Lett 63, 21 (2016). https://doi.org/10.1007/s11249-016-0709-4
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s11249-016-0709-4