
Abstract
During hydraulic fracturing, thousands of barrels of fluid are injected into the rock surrounding the created fractures. Observations show that later during flowback, only a small fraction of the injected fluid volume is produced back. In tight naturally fractured formations, this can be explained by the leading role of preexisting rock discontinuities in the transport of fluids in such rocks. In this work, we investigate the mechanics of injected fluid flow in and out of preexisting rock discontinuities during a typical operational sequence of fracturing treatment, well shut-in and flowback. The mechanics of fluid flow in compliant discontinuities, where conductivity is sensitive to stress changes, is different from that in a stiff rock matrix. To understand and quantify rock pressurization, fluid leakoff and flowback rates, we develop a numerical model of fluid flow in a system of arbitrarily oriented discontinuities. Using this model, we predict spatial distribution of the injected fluid in a naturally fractured rock at any time after the beginning of the fracturing treatment as well as after the well shut-in and during flowback. The model explains the trapping of injected fluid in the discontinuities during production. We validate the model by comparison with field data and provide rough estimates of the volumetric fracturing fluid accumulation in the rock discontinuities after the treatment. The spatial extent of rock “flooding” around hydraulic fractures is found to depend on the density and orientation of rock discontinuities.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
1.1 Injected Fluid Loss
Field observations show that a large amount of fluid injected during hydraulic fracturing treatments is not recovered during subsequent flowback operations. Several authors (Abbasi 2013; Kondash et al. 2017; Alkouh et al. 2013) published quantitative overviews of injected fluid recovery during well production.
Abbasi (2013) proposed a model for analyzing early-time rate and pressure data in hydraulically fractured gas and oil wells. He divided the production profile into three regions. In the first region, water production dominates. In the second region, gas/oil (for gas/oil wells, respectively) production increases, and water production decreases. The third region is characterized by dominant gas/oil (for gas/oil wells, respectively) production. In the model proposed by Abbasi, gas compressibility was not accounted for, although in the second and third regions, compressibility has an important impact. According to this model, water production initially increases linearly with time, and the majority of recovered water is produced during the first period.
Kondash et al. (2017) analyzed the production rates and composition of produced water. The typical production pattern begins with high production rates during the first few months of production followed by decline and stabilization of water production rates. The produced fluid is mainly composed of natural formation brines (92 to 96%) and returned injected hydraulic fracturing fluids (which constitute only 4 to 8% of the entire produced water volume). The authors presented field data from six major unconventional oil and gas formations in the USA over the first 5 to 10 years of production.
Alkouh et al. (2013) presented a new method to calculate effective fracture volume using not only gas but also water production data. The method is based on modification of the total compressibility, which includes consideration of the gas compressibility, which is the dominant factor. The method was validated by multiple field cases from the Fayetteville and Barnett formations. For each of these cases, the authors provided information about injected and recovered volumes.
The field data provided by these authors (Abbasi 2013; Alkouh et al. 2013; Kondash et al. 2017) are gathered and presented in Table 1 and in the bar charts in Fig. 1. In agreement with field data shown in Table 1 and the bar charts in Fig. 1, there is a significant loss of injected fluid during oilfield operations. Typically, more than half of the injected volume is not recovered. Kondash et al. (2017) performed a chemical analysis of recovered fluids and proved that majority of injected water is recovering during the flowback stage.

1.2 Storage of the Injected Fluid
There are many possible mechanisms of injected fluid trapping. These mechanisms can be referred to various types of fluid storage in the rock and, thus, can be associated with different physics of fluid transport. We recognize two key storage components of the injected fluid: the rock matrix and a system of hydraulically induced fractures, including different kinds of preexisting rock discontinuities (e.g., faults, bedding planes, joints, cleavage, etc.).
In tight rock formations, like shales, matrix permeability is very low and cannot produce reservoir fluids economically on its own (Walton and McLennan 2013). On top of the fluid flow due to pressure difference that is typical in highly permeable rocks, there are other mechanisms for fluid mobilization and trapping in the matrix, such as osmosis and capillary effects, which may play a dominant role in low-permeability rocks. However, all these mechanisms explain fluid flow in the rock matrix only, which is not enough for naturally fractured formations.
Several publications (Llanos et al. 2017; Stanchits et al. 2015; Suarez-Rivera et al. 2013) introduce the concept of percolation of fluid into a series of contacted preexisting discontinuities. Some of them report incomplete recovery of injected fluid from unconventional rocks.
Stanchits et al. (2015) performed two laboratory tests on Niobrara outcrop shale blocks aiming to investigate the influence of rock fabric on near-wellbore fracture geometry. These two experiments clearly showed penetration of the fracturing fluid along the bedding planes (Fig. 2, left). In this publication, it has been demonstrated that rock fabric plays a significant role in the fracturing of shales. It was shown during the experiments that the interaction of a hydraulic fracture with the rock fabric can cause some negative effects, such as near-wellbore fracture tortuosity, poor proppant delivery and proppant screenout. Despite practical discussions about impact of rock discontinuities on the fracture propagation process, peculiarities of injected fluid leakoff into the preexisting rock discontinuities were not discussed in the paper.

Epoxy propagation into discontinuities, marked by pink dashed lines (left). This photograph is adapted from (Stanchits et al. 2015) after the permission by Dr. Stanchits and EAGE. Fluid propagation into artificial (vertical) and natural (horizontal) bedding planes (right). This picture was taken from (Llanos et al. 2017) after the permission by E. M. Llanos
Llanos et al. (2017) developed a criterion for predicting whether a hydraulic fracture will cross a discontinuity. In that experiment, a set of nine thick plates was used. A 22-mm hole was drilled in the central slab and cased with a 20-mm polyvinyl chloride tube glued with epoxy and sealed at the bottom with a rubber cap. The central and two neighboring plates were cemented to simulate a monolithic thicker central layer. The authors noted that significant fluid loss into the cemented cuts had been observed after testing (Fig. 2, right).
Suarez-Rivera et al. (2013) described the effect of weak interfaces on fracture geometry and containment. Considerable arrest and leakoff at the interface were shown during large block testing. Moreover, the authors identified properties that are needed to predict fracture complexity. They are the density and orientation of the planes of weakness and their mechanical properties, such as rock properties, in situ stresses and fracturing fluid injection rate and rheology. The understanding of rock fabric is the key to predict fracture complexity and fracture height containment.
1.3 State-of-the-Art Modeling of Leakoff into Natural Rock Discontinuities
There are multiple models considering a major role of preexisting rock discontinuities in the leakoff process. Some of them are based on various kinds of effective medium theory, e.g.:
-
make a leakoff coefficient pressure-dependent (e.g., Economides and Nolte 2000)
-
use a dual-porosity model of rock (e.g., Wang and Elsworth 2017, Houzé et al. 2017)
-
explicitly consider the large-scale fracture network connected to a homogeneous microporous system (e.g., Houzé et al. 2017, Weng et al. 2014)
Economides and Nolte (2000) underline the importance of fluid leakoff control for the optimization of hydraulic fracture treatment. They claim that the typical assumption of a constant leakoff coefficient does not work for compliant fractured formations. Rock discontinuities with rough walls are more sensitive to effective stress changes than is the matrix of rock. For naturally fractured formations, the matrix permeability is often neglected. There are both analytical models predicting the change of leakoff coefficient with fluid pressure (e.g., Walsh 1981) and tables of their correlation based on field measurements.
Wang and Elsworth (2017) considered two distinct porosities in naturally fractured reservoirs: one in the matrix and another in discontinuities. Although there are many types of rock discontinuities that have different properties, the dual-porosity model represents all of them as a homogeneous equivalent medium with large-scale permeability.
The idea of including natural fractures as the conductive elements was also realized in KAPPA software (https://www.kappaeng.com). KAPPA’s Dynamic Data Analysis software includes methodologies and tools developed by the oilfield industry to analyze the transient measurements of fluxes and physical properties (pressure, temperature, etc.) and forecast their behavior at different time scales. The developers of the software consider only natural fractures and propose two different options for their description (Houzé et al. 2017). In the first option, the natural fractures are considered as a dense network of small, well-connected objects (Fig. 3, top). This fractured system behaves like a homogeneous equivalent medium with large-scale permeability (i.e., the dual-porosity approach).

Two approaches for natural fractures modeling in KAPPA software: dual-porosity model (top) and fracture network connected to the matrix (bottom). This picture was taken from Houzé et al., 2017
In the second option, the natural fractures are assumed to be large objects connected to the matrix that create long-distance connections between the wells. In Fig. 3, bottom, one can see that a preexisting natural fracture can cross several created hydraulic fractures. So, the natural fractures cannot be homogenized and should be considered separately from rock matrix. The position of a natural fracture with respect to hydraulic fractures is important for KAPPA approach, and transport inside natural fractures is described using Darcy’s law. However, KAPPA does not explicitly take into account orientation of natural fractures.
Another approach developed by Weng et al. (2014) describes a complex fracture network similarly using a discrete fracture network (DFN). This approach also considers the natural fractures as a separate component of the rock matrix. The model solves the fully coupled problem of fluid flow in the fracture network and the elastic deformation of the fractures and has similar assumptions and governing equations as found in conventional pseudo-3D hydraulic fracture models. As a natural extension of the hydraulic fracture network, instead of solving the problem for a single planar fracture, this unconventional fracture model (UFM) solves the equations for the complex fracture network, which consists of hydraulic fracture junctions with the DFN and branching (Fig. 4).

UFM simulation for a Barnett well with slickwater treatment [taken from (Weng et al. 2014)]
As mentioned above, both the KAPPA approach and the UFM approach consider only natural fractures (vertical discontinuities). Neither of these models considers roughness discontinuity, which is critically important for fluid flow in discontinuities (see below).
1.4 Aim, Importance and Novelty of This Work
In the first two “effective medium” approaches described above (constant and pressure-dependent leakoff), transport of injected fluid in and out of discontinuities is not modeled explicitly for each affected discontinuity. More advanced approaches undertaken in the UFM and KAPPA models consider leakoff into natural fractures explicitly. However, they consider only vertical discontinuities and neglect participation of nonvertical ones.
Additionally, most previous works consider only one stage of fluid transport, either leakoff of injected fluid during injection or production of fluids. However, as long as the equations and geological fracture properties remain the same during both stages, it is natural to develop and apply one unified model for description of both phases of fluid flow. This methodology is documented in this work. Moreover, some experiments (Singh et al. 2016; Zhou et al. 2015) showed the influence of roughness on fluid flow, which was not taken into account by pressure-dependent leakoff coefficient, or dual-porosity models, or even explicit fracture modeling in UFM and KAPPA.
During the first stage of a hydraulic fracturing treatment, a huge amount of fluid is pumped into a perforated section of a well at high pressure. This process creates fractures in the rock that are typically vertical, and these fractures propagate away from the well. During fracturing, the injected fluid travels along the created hydraulic fractures for sufficiently long distances from the well, penetrates the rock matrix and contacts geological discontinuities. The role of these geological discontinuities was experimentally studied in the following two works that focused on fluid penetration through a rough channel in rock. Singh et al. (2016) demonstrated the effect of sample roughness on fluid flow. Zhou et al. (2015) focused on nonlinearity of fluid flow through rough-walled fractures. In both works, flow tests were repeated at different constant fluid pressures and confining pressures. These experiments clearly showed the necessity of considering discontinuity roughness.
After hydraulic fracturing treatment of the particular stage, the stage is plugged, and there is no “new” fluid entering the stage. However, the discontinuities continue imbibing the fluid residing in the hydraulic fractures as the pressure gradient created during fracturing does not dissipate instantaneously. Griffith and McClure (2016) attempted to characterize the relationship between deformation and fluid flow during well stimulation and production using microseismic data and pressure measurements. They reported seismic data from an observation well both during and after stimulation of neighboring wells. These data demonstrate pressure perturbation propagation at large distances from the inferred hydraulically created fractures.
Finally, when the isolation devices (plugs) are drilled out, the well with created fractures is put on production. The pressure in a well is dropped below the reservoir pressure, allowing injected fluid to flow out of hydraulic fractures and rock storage into the wellbore (the so-called flowback stage). Unfortunately, previous works presenting the data of incomplete fluid recovery (Table 1) have not described the mechanisms of fluid flow inside a rock that could explain low fluid recovery. The process of fluid flowback was carefully studied by Clarkson and Williams-Kovacs (2013) and Williams-Kovacs et al. (2015). Clarkson and Williams-Kovacs (2013) developed a new approach for making long-term forecasts from early production data analysis in hydraulically fractured reservoirs. Williams-Kovacs et al. (2015) presented case studies that demonstrate the potential monetary impact of this new analysis method.
1.5 Structure of This Work
In this work, we build a model and describe the process of injected fluid movement in rock with weak discontinuities by considering sequentially the leakoff, shut-in and flowback stages. The structure of this work is the following. In the first section, we describe the model of fluid transport in deformable rock discontinuities. In the second section, we build a mathematical model that allows us to quantify the fluid transport inside rock discontinuities and perform computations. The third section is devoted to the results of numerical simulations. It demonstrates peculiarities of fluid propagation along the discontinuities, such as transient change of pressure and flow rate profiles in them away from the hydraulic fracture, continued leakoff after the shut-in, and even during the flowback, and explains irrecoverable fluid volumes during flowback. Validation of the model against laboratory and field tests is described in the fourth section of the article. In the final section, we estimate time, volume and depth of injected fluid penetration into the discontinuities after a fracturing treatment, given in situ stress and pressure conditions. We also pay attention to the propagating pressure perturbations after the treatment that could be registered at other distant wells. Finally, we give estimations of recovered volumes of injected fluid during flowback and production as a function of in situ rock stresses, discontinuity orientation and their spatial density.
2 The Model
Typically, horizontal wells are fractured in multiple stages and several fractures may grow from each stage (Fig. 5). Under the normal stress regime in rock, hydraulic fractures propagate vertically in the maximum horizontal stress direction (Valko and Economides 1995). In tight low-permeability formations, this created system of hydraulic fractures defines primary pathways for injected fluid in rock. Such formations are often naturally fractured and contain many weak preexisting discontinuities. They are easily damaged and become hydraulically conductive during hydraulic fracturing and subsequent production (Weng et al. 2014; Walton and McLennan 2013). Fluid transport along the discontinuities can be complex, as shown in Fig. 5. Characteristics of natural rock discontinuities, such as their geometry, aperture, conductivity and applied in situ stress are often unknown. Only a few integral large-scale characteristics responsible for the total rate of leakoff and production can be calibrated from the pressure match, leakoff and production data.

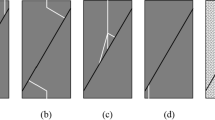
Various kind of discontinuities. a Image log of partly open fracture in New Albany shale core. Black layers correspond to subhorizontal bedding planes (Gale et al. 2014). b New Albany shale roadcut with hierarchical fracture traces. Height of bed below label Lb ~ 0.5 m. Overlay shows fracture traces cutting multiple beds (F). These vertical beds are similar to subvertical natural fractures in rock (Gale et al. 2014). c Side view of borehole with joint hydraulic fractures, that are crossed by several bedding planes. These bedding planes are subhorizontal discontinuities. d Top view of borehole with joint hydraulic fractures that are crossed by several natural fractures. These natural fractures are subvertical discontinuities. Pictures a and b are taken from (Gale et al. 2014) after permission by J. Gale
2.1 Model Assumptions
The presented model has the following assumptions:
-
When hydraulic fractures are propagating, they cross multiple preexisting discontinuities in rock.
-
The discontinuities are assumed infinitely long and conductive in space, which is adequate when the mechanical activation depth exceeds the depth of injected fluid penetration.
-
The discontinuities may have any 3D orientation in space. The model equally deals with subvertical natural fractures and subhorizontal bedding planes as well as other type of discontinuities.
-
The discontinuities are assumed to not cross one another.
-
The injected fluid penetrates only in those discontinuities that were intersected by the hydraulic fracture.
-
The discontinuities crossed by the hydraulic fracture (all or several) are mechanically weak. They are activated in shear by the fracture-induced stresses and become hydraulically conductive, so the injected fluid infiltrates them.
-
Being hydraulically conductive, the discontinuities are mechanically closed on rough walls with natural asperities.
-
The applied confining stress and mechanical properties (e.g., roughness, mineralogic content, surrounding rock) are constant along each discontinuity.
-
Aperture and conductivity of the discontinuities are dependent on the local pressure and stress changes.
-
The slip along discontinuities is assumed suddenly created during the fracturing treatment and unchanged during the fluid injection and withdrawal.
-
There is no fluid leakoff into a rock matrix through the walls of the discontinuities.
-
Fluid flow in and out of the discontinuities is controlled by the given pressure and flow rate at the contact of the discontinuity and the hydraulic fracture.
-
The formation fluids have rheology identical to the injected fluid and are displaced in a “piston-like” manner. The injected fluid occupies the region of discontinuities adjacent to the hydraulic fracture whereas in the far-field, the discontinuities are filled by the formation fluids.
2.2 3D Orientation of Rock Discontinuities
There are many types of rock discontinuities: bedding planes, schistosity, foliations, joints, cleavages, natural fractures, fissures, cracks, fault planes and others. For the fluid transport problem, we divide them into two groups: horizontal-subhorizontal discontinuities (e.g., bedding planes) (Fig. 5a, c), and vertical-subvertical discontinuities (e.g., natural fractures) (Fig. 5b, d), which differ primarily in their orientation in space. Orientation tells whether vertical or horizontal rock stresses determine the pressure-dependent response of discontinuities to fluid penetration and withdrawal.
Anderson (1951) postulated the following faulting stress regimes:
-
Normal faulting stress regime (the vertical stress is the greatest one, \(\sigma_{\text{v}} > \sigma_{\text{H}} > \sigma_{\text{h}}\))
-
Strike-slip faulting regime (the vertical stress is the intermediate one, \(\sigma_{\text{H}} > \sigma_{\text{v}} > \sigma_{\text{h}}\))
-
Reverse faulting regime (the vertical stress is the least principal stress, \(\sigma_{\text{H}} > \sigma_{\text{h}} > \sigma_{\text{v}}\)).
where \(\sigma_{\text{v}}\) [Pa] is the vertical stress, and \(\sigma_{\text{h}}\) [Pa] and \(\sigma_{\text{H}}\) [Pa] are the horizontal stresses.
The regime depends both on the location and depth. The normal stress applied to a discontinuity is determined by the principal stresses, dip \(\vartheta ,\) and azimuth \(\varphi\) angles, as presented in Fig. 6. Using a tensor rotation relation (Jaeger et al. 2007), one can write

Coordinate system of principle stresses (left) and dependence of normal stress on dip and azimuth angles (right)
2.3 Model of Fluid Flow in a Discontinuity
Different groups of discontinuities (e.g., subvertical, subhorizontal) can have different values of model parameters described below. In this work, we build and apply one model for all discontinuities under consideration. That allows us to reduce the complex naturally fractured problem above to a simpler problem of fluid flow in one discontinuity.
Let us choose axis \(x\) along the discontinuity, and \(x = 0\) corresponding to its intersection with a hydraulic fracture. The discontinuities contacted with a hydraulic fracture are assumed to be bi-winged, infinite in extent and near-planar conductive channels. Taking symmetry of the problem into account, we consider fluid flow from a hydraulic fracture into one wing of a bi-winged discontinuity. Figure 7 illustrates one wing of a discontinuity filled by injected and formation fluid. The rectangular “teeth” inside the discontinuity represents mineralization (natural asperities).

Discontinuity with closed by natural asperities
The volume of fluid accumulated inside both wings of a single discontinuity is
where \(l\) [m] is the length of intersection between a hydraulic fracture and discontinuity (in the \(z\) direction), and \(q\) [m2/s] is the flow rate (per unit length in the z direction perpendicular to the projection shown in Fig. 7, which obeys Darcy’s law
where \(c\) [m3] is the conductivity of a discontinuity, \(\mu\) [Pa∙s] is the viscosity of injected fluid, and \(p\) [Pa] is the fluid pressure.
Transport of fluid along a discontinuity is described by the following mass balance equation:
where \(\rho\) [kg/m3] is the density of penetrated fluid, and \(a\) [m] is the discontinuity aperture. To solve this mathematical problem, we add some relations for all these functions.
Initially, at \(t = 0\), we assume that the entire rock is not contacted by the injected fluid, and pressure everywhere in the rock and discontinuities is equal to the reservoir pore pressure:
where \(p_{\text{p}}\) [Pa] is the pore pressure.
During fracturing treatment, shut-in and flowback (\(t > 0\)), the pressure in hydraulic fracture \(p_{\text{HF}}\) changes. It exceeds the pore pressure \(p_{\text{p}}\) during injection. Then it declines but stays above the pore pressure during shut-in. Then it potentially drops below the far-field pore pressure during flowback. The pressure difference enables fluid leakoff in or flowback out of discontinuities, respectively.
The boundary condition for the discontinuity is
The pressure in the far-field zone (\(x \to \infty\)) is always equal to pore pressure \(p_{\text{p}}\):
Equation (4) with initial and boundary conditions Eqs. (5)–(7) constitute the mathematical statement of the fluid transport problem during leakoff and flowback.
2.4 Pressure- and Stress-Dependent Conductivity
Hydraulic aperture is a measure of void spaces through which fluid flow can take place. According to the Willis-Richards model (Willis-Richards et al. 1996), the aperture of a closed geological fracture is the following function of inner pressure, slip and mechanical properties of a fracture:
where \(a_{0}\) [m] is the aperture at zero effective stress,\(u_{\text{s}}\) [m] is the relative shear displacement of fracture wall faces, \(\phi_{\text{dil}}^{\text{eff}}\) [–] is the effective shear dilation angle, \(\sigma_{\text{n}}^{'} = \sigma_{\text{n}} - p\) [Pa] is the Terzaghi effective normal stress, which is the total normal stress minus the fluid pressure in the fracture, and \(\sigma_{{{\text{n}}, {\text{ref}}}}^{'}\) [Pa] is the reference stress resulting in an aperture reduction to 10 times less than \(a_{0}\).\(\sigma_{{{\text{n}}, {\text{ref}}}}^{'}\) plays a role in the discontinuity’s rigidity. The higher is \(\sigma_{{{\text{n}}, {\text{ref}}}}^{'}\), the higher is the discontinuity stiffness. Note that Eq. (8) is valid only if the fracture is mechanically closed, i.e.,
In this work, we assume that the slip \(u_{\text{s}}\) along the discontinuity is generated at the moment of contact with a hydraulic fracture. Later incrementation of the slip is ignored. Therefore, we combine three parameters \(a_{0} , u_{\text{s}}\), and \(\phi_{\text{dil}}^{\text{eff}}\) into a single constant parameter \(a_{{0, {\text{s}}}}\) [m], which is the shear-induced aperture of a discontinuity at zero effective stress.
As we deal with the preexisting constant slip \(u_{\text{s}}\), i.e., the constant \(a_{{0,{\text{s}}}}\), the aperture Eq. (8) is rewritten as:
Thus, the aperture is a function of fluid pressure. When the pressure at the hydraulic fracture-discontinuity boundary is elevated (i.e., leakoff), the aperture at the boundary of the hydraulic fracture and the discontinuity is increased. During flowback, the pressure in the hydraulic fracture is lowered below the pore pressure and that leads to aperture reduction below the initial aperture.
According to the Barton model (Barton et al. 1985), the conductivity of a discontinuity is described as follows:
where JRC [–] is the dimensionless joint roughness coefficient, \(l_{\text{m}}\) [–] is the scale transformation factor from microns to the units of choice (meter), and \(a\) [m] is the aperture that is described by Eq. (11). Values of JRC can be different for different discontinuity roughnesses. Barton gives a range of JRC from 0 to 20, as Fig. 8 shows.

JRC for different surface roughness profiles. This illustration is adapted from (Barton and Choubey 1977) with the permission of N. Barton
We also assume constant viscosity, which is valid when the fluid viscosity changes insignificantly with pressure, and temperature in rock is nearly constant. The fluid’s equation of state is considered as the following function of pressure:
All introduced quantities are described as functions of fluid pressure only. Solving the problem for pressure distribution in space and time, we find the full solution of the problem.
2.5 Summary of Discontinuity Parameters
The in situ stress, geological properties and fluid parameters used to describe the fluid transport in and out of discontinuities are listed below.
Total in situ stresses are the following:
-
\(\sigma_{\text{v}}\) [MPa], vertical stress
-
\(\sigma_{\text{H}}\) [MPa], maximum horizontal stress
-
\(\sigma_{\text{h}}\) [MPa], minimum horizontal stress
Geological properties of a discontinuity include the following:
-
\(l\) [m], length of intersection between a hydraulic fracture and discontinuity
-
\(a_{0}\) [mm], zero-stress aperture of discontinuity
-
\(u_{\text{s}}\) [mm], relative shear displacement of fracture wall faces
-
\(\phi_{\text{dil}}^{\text{eff}}\) [\(^\circ\)], effective shear dilation angle
-
\({\text{JRC}}\), joint roughness coefficient
-
\(\vartheta\) [\(^\circ\)], dip angle
-
\(\varphi\) [\(^\circ\)], azimuth angle
-
\(\sigma_{{{\text{n}}, {\text{ref}}}}^{'}\) [MPa], reference effective stress
Fluid parameters are the following:
-
\(\rho\) [kg/m3], fluid density
-
\(\mu\) [cP], fluid viscosity
-
\(p_{\text{HF}}\) [MPa], fluid pressure in fracture
Some of these “basic” parameters were used to define other discontinuity characteristics:
-
\(\sigma_{\text{n}}\) [MPa], normal stress applied to discontinuity Eq. (1)
-
\(a_{{0,{\text{s}}}}\) [mm], shear-induced aperture at zero effective stress Eq. (10)
-
\(a\) [mm], aperture Eq. (8)
-
\(c\) [md-ft], conductivity Eq. (12)
Parameters we want to find are
3 Mathematical Representation of Fluid Flow Along a Discontinuity
As was discussed above, stored volume Eq. (2), flow rate (3) and governing Eq. (4) depend on fluid pressure and some other predefined properties (i.e., in situ stresses, JRC, etc.) that are assumed to be constant. Therefore, we first need to find the fluid pressure (which is done in the first part of this section). In the second part, we discuss how to obtain flow rate, stored volume, etc. via pressure.
3.1 Equation for Pressure
3.1.1 Dimensional Equation
Substituting Darcy’s law Eq. (3) into the mass balance Eq. (4), we get the following equation for the fluid pressure \(p\):
where \(f\left( p \right) = \frac{\rho \left( p \right)c\left( p \right)}{\mu }\). This equation must be supplemented with initial condition, Eq. (5), and boundary conditions, Eqs. (6)–(7).
3.1.2 Scaling
Let us introduce dimensionless parameters as follows:
where \(T_{*} , L_{*} ,p_{*} , \rho_{*} , \mu_{*} , a_{*} , c_{*}\) are scale parameters for time, coordinate, pressure, density, viscosity, aperture and conductivity, respectively. The choice of these scales will be discussed below. \(\tau , \xi , \varPi , \tilde{\rho }, \tilde{\mu }, \tilde{a}, \tilde{c}\) are nondimensional functions.
Substituting all these relations in Eq. (14), we come to the following equation:
Let us discuss the choice of scaling parameters.
Time scaling \(T_{*}\) can be chosen according to characteristic time of the process and the necessary accuracy. For example, injection or flowback time can be chosen as a time scale.
Let us choose the pressure scale \(p_{*}\) in the following form:
The physical meaning of this scale will be discussed below.
Using Willis-Richards formula Eq. (8), we derive a scale parameter \(a_{*}\) and a nondimensional aperture \(\tilde{a}\):
By analogy, using the Barton model Eq. (12), we can obtain a scale parameter \(c_{*}\) and nondimensional conductivity \(\tilde{c}\):
Hence,
Equation (13) can be rewritten as:
Thus, we obtain
where
However, we will see that sometimes we can neglect fluid compressibility and assume the fluid to be incompressible due to a small value of \(g\left( \varPi \right)\) in comparison with other terms.
Fluid viscosity can also be a function of pressure and temperature, but in this work, we assume it to be constant:
To complete a mathematical description of the fluid transport problem, we should introduce the last scale parameter \(L_{*}\), but there is no characteristic scale for it in this problem due to the infinite length of the conductive channel. Consequently, we can choose \(L_{*}\) as arbitrary at our convenience:
3.1.3 Nondimensional Equation
Substituting explicit formulas for \(\tilde{a}, \tilde{c}, \tilde{\rho }, \tilde{\mu }, \tau , \xi\) in Eq. (19) and taking into account Eq. (27), we get
where
Let us introduce nondimensional pressure on the hydraulic fracture-discontinuity boundary as \(\gamma_{\text{HF}}\). Then, initial Eq. (5) and boundary Eqs. (6)–(7) conditions for nondimensional Eq. (28) can be rewritten in the following form:
We used a Picard method to solve Eq. (28).
If we neglect the influence of fluid compressibility in comparison with the other terms (i.e., \(g\left( \varPi \right) \ll 1\)), the equation will have a simpler form. The case of a slightly compressible fluid will be our focus in this work. The nondimensional governing equation for a slightly compressible fluid is as follows:
3.1.4 Flow Regimes
If the absolute value of the pressure difference \(p_{\text{HF}} - p_{\text{p}}\) is much less than the pressure scale \(p_{*}\) (Eq. (20)) during the entire process, the discontinuity can be accepted as being rigid, i.e., its aperture can be assumed constant under applied pressure. In terms of the nondimensional pressure \(\varPi\) (Eq. (18)), this condition corresponds to \(\left| \varPi \right| \ll 1\) during the entire process, and Eq. (34) becomes a linear diffusion equation:
In what follows, we use the following terminology for the regimes of a slightly compressible fluid flowing in a discontinuity with large or small sensitivity to pressure changes:
-
Nonlinear flow regime takes place when the discontinuity has large sensitivity to pressure changes. This is a general case of fluid flow in a discontinuity, which is described by Eq. (34).
-
Linear flow regime is limited to small variation of the discontinuity properties with pressure changes. This regime is amenable to the analytical solution given by Carslaw and Jaeger (1986), but can also be described numerically by Eq. (34) and its linearization Eq. (35).
The transition between the linear and nonlinear regimes may be arbitrarily picked, for example, based on some threshold in dimensionless pressure \(\varPi\) (Eq. (18)) such that when
the relative discrepancy between nondimensional pressures calculated via Eq. (34) and via its linearization (35) is no more than 6%. The resulting regime is considered linear.
When
the regime is considered nonlinear.
Note that the dimensionless pressure \(\varPi\) is controlled by the operational parameters (\(p_{\text{HF}} - p_{\text{p}}\)) and the in situ discontinuity properties (\(\sigma_{{{\text{n}},{\text{ref}}}}\), \(\sigma_{\text{n}}\), \(p_{\text{p}}\)).
3.2 Equations for Flow Rate and Volume
We are also interested in the flow rate and stored fluid volume in a discontinuity. In nondimensional form, they are expressed via the nondimensional pressure \(\varPi\).
Let us introduce dimensionless flow rate and volume stored in a discontinuity as follows:
Substituting conductivity, viscosity, pressure and coordinates into Darcy’s law Eq. (3), we get
Thus
The volume stored in a discontinuity \(v\) Eq. (2) can be rewritten as
Therefore
Additionally, we can calculate the injected fluid volume via the discontinuity volume occupied by the injected fluid. Injected fluid resides in the discontinuity region that is adjacent to the hydraulic fracture. Let this region be \(0 < x < L_{\text{front}}\), where \(L_{\text{front}}\) [m] is the depth of fluid penetration into discontinuity. Then
where
is the nondimensional fluid front. Note, that
Therefore, we have the following integral equation for \(l_{\text{front}}\):
4 Results of Numerical Simulation
To demonstrate the model, in this section, we consider two synthetic examples of fluid transport in rock discontinuities. In these examples, we investigate fluid transport during injection, shut-in and flowback. Following the mathematical model description above, we compare linear and nonlinear flow regimes (see Eqs. (36) and (37), respectively).
4.1 Simulation Problem
We consider fluid flow in and out of a one single discontinuity during three subsequent stages. The hydraulic fracture and discontinuity are connected by means of the pressure prescribed at the junction of those (see Eq. (6)). For our synthetic simulations, we simplify the boundary conditions as follows (Fig. 9). During injection (\(0 < t < T_{1}\)), the fluid pressure at the hydraulic fracture-discontinuity junction (\(x = 0\)) is constant and equal to \(p_{\text{tr}}\). During the shut-in (\(T_{1} < t < T_{2}\)), the fluid flow through the discontinuity boundary is small, so we neglect it and consider \(q = 0\). When the fracture is put on flowback (\(t > T_{2}\)), the pressure is dropped below the far-field pore pressure \(p_{\text{p}}\). The dropped pressure is constant and equal to \(p_{\text{fb}}\) during the entire flowback period. These boundary conditions are illustrated in Fig. 9.

Assumed pressure \(p\) (top) and flow rate \(q\) (bottom) at the hydraulic fracture-discontinuity boundary for each stage: injection, shut-in and flowback
In real operations, the durations and boundary conditions of the above-mentioned stages are not strictly defined on a time scale as shown in Fig. 9. The boundary conditions likely have smooth transition between stages.
As discussed previously, slightly compressible fluid flow in and out of a discontinuity can be either general (or nonlinear), when the discontinuity has a non-negligible compressibility (i.e., the discontinuity is compliant), or linear when the discontinuity has negligible compressibility for the given pressure perturbations. For simulations, we use the following nondimensional boundary conditions:
-
\(\gamma_{\text{tr}} = 0.05, \gamma_{\text{fb}} = - 0.05\) for linear flow regime
-
\(\gamma_{\text{tr}} = 0.5, \gamma_{\text{fb}} = - 0.5\) for nonlinear flow regime
where \(\gamma_{\text{tr}} = \frac{{p_{\text{tr}} - p_{\text{p}} }}{{p_{*} }}, \gamma_{\text{fb}} = \frac{{p_{\text{fb}} - p_{\text{p}} }}{{p_{*} }}\). Moreover, we will use nondimensional times \(\tau_{1} , \tau_{2}\) instead of \(T_{1} , T_{2}\).
Consider a formation with the properties given in Table 2.
Both nonlinear and linear flow regimes can occur in this formation. In Table 3, we present two sets of operational parameters that lead to nonlinear and linear regimes respectively.
The values of treatment and flowback pressure may be different in real field cases. In Table 3, we chose extreme pressure values, but this is to demonstrate that the linear or nonlinear flow regime can be selected only by the operational parameter \(p_{\text{HF}} \left( t \right)\).
4.2 Results of Simulation
In this section, we compare the nondimensional quantities (pressure, flow rate, and injected fluid volume inside a discontinuity) for rigid and compliant discontinuities.
We simulate the fluid flow during three subsequent stages for linear (\(\gamma_{\text{tr}} = 0.05, \gamma_{\text{fb}} = - 0.05\)) and nonlinear (\(\gamma_{\text{tr}} = 0.5, \gamma_{\text{fb}} = - 0.5\)) flow regimes. Color notations are selected such that all plots concerning a nonlinear regime use blue-green–red colors whereas the plots concerning a linear regime are in black-cyan-magenta.
The plots in Figs. 10, 11, and 12 present the distribution of nondimensional pressure and flow rate along a discontinuity. The profiles are obtained for three different times in each stage. We do not compare the results obtained for different flow regimes quantitatively, but we compare them qualitatively. In this section, we will address nondimensional pressure as “pressure”, and nondimensional flowrate as “flowrate”.

Pressure and flow rate profiles during injection throughout \(\tau_{1} = 1\) for nonlinear \(\gamma_{\text{tr}} = 0.5\) (a, b) and linear \(\gamma_{\text{tr}} = 0.05\) (c, d) regimes

Pressure and rate profiles during shut-in of the discontinuity of length \(\tau_{2} = 1\) after the injection into discontinuities within \(\tau_{1} = 1\) for nonlinear \(\gamma_{\text{tr}} = 0.5\) (a, b) and linear \(\gamma_{\text{tr}} = 0.05\) (c, d) regimes

Pressure and rate profiles during flowback stage (of the duration \(\tau_{3} = 1\)) following the injection with \(\tau_{1} = 1\), and the shut-in with \(\tau_{2} = 1\) for nonlinear \(\gamma_{\text{tr}} = 0.5, \gamma_{\text{fb}} = - 0.5\) (a, b) and linear \(\gamma_{\text{tr}} = 0.05, \gamma_{\text{fb}} = - 0.05\) (c, d) regimes
Injection is characterized by a sharp growth of pressure next to the fracture boundary (Fig. 10a, c). During injection, the pressure front propagates along the discontinuity with time, but the injected fluid rate, which was highest at the beginning of injection, declines with time (Fig. 10b, d). Leakoff is quite different between a compliant and a rigid discontinuity because in the compliant case, the aperture increases due to applied pressure.
At the beginning of shut-in, fluid flow through the contact with the hydraulic fracture (\(\xi = 0\)) ceases, but the induced pressure gradient continues to move the injected fluid away from the hydraulic fracture (Fig. 11a, c). The pressure gradient gradually declines with time, which slows the flow rate inside a discontinuity with time (Fig. 11b, d).
A sharp pressure drop at the beginning of the flowback stage initiates fluid return from the discontinuity. In the near-contact area, the flow rate falls to large negative values (Fig. 12b, d), which demonstrates intensive fluid flowback. We note that during flowback, two spatial regions form: one of them, located in the near-field area, participates in flowback (rate has a negative value), and another one, located in the far-field zone, continues to leakoff fluid away from fracture (Fig. 12b, d). The front between those areas gradually moves away from the fracture during flowback. The length of the flowback zone (that is closer to the hydraulic fracture) is nearly 1/3 of the leakoff zone whereas the volume that participates in flowback is much higher than that participating in leakoff.
The associated effect is coexistence of locally underpressurized and overpressurized zones (Fig. 12a, c) during flowback.
Let us also consider other simulation examples. Figure 13 shows the volume that is injected in a discontinuity during the injection stage. We can see that as more pressure at the boundary is applied, more volume will be stored in a discontinuity by the end of injection. Moreover, we can notice that in the linear flow regime, doubling of the treatment pressure results in doubling of the injected volume (see Fig. 13b). This explains the name of linear flow regime. In the nonlinear flow regime, the doubling of the treatment pressure will result in much larger increase of the injected volume (Fig. 13a). This explains nonlinear flow regime.

Fluid accumulation during injection for nonlinear (a) and linear (b) flow regimes for different treatment pressure
Figure 14(a, c) plots the recovery of leakoff fluid volume as a function of flowback duration for different treatment parameters during shut-in and flowback. In the simulations shown in Figs. 14 and 15, we fix the duration of injection stage \(\tau_{1} = 1\) and vary the duration of shut-in stage \(\tau_{2}\). From Fig. 14(b, d) we see that for a shorter shut-in, the percentage of leakoff fluid recovery is higher. Moreover, the smaller magnitudes of the flowback and treatment pressures, the closer the process is to the linear flow regime, when all injected volume is recovered completely (Fig. 14c, d) in a relatively short time.

Volume stored within a discontinuity and percentage of injected fluid recovery for compliant (a, b) and rigid (c, d) discontinuities with different treatment parameters

Fluid front propagation within compliant (a) and rigid (b) discontinuities with different operational parameters
During flowback, the largest flow rate (therefore, the fastest recovery) was observed at the beginning of the flowback due to sharp pressure drop.
Figure 15 demonstrates the injected fluid front propagation (see Eq. (46) for details). We can see (Fig. 15) that the longer is the shut-in stage, the further the nondimensional fluid front (Eq. (44)) goes. One most important detail is the delay of the fluid flow returning during flowback. We should also notice that the longer the shut-in period, the slower the fluid recovery will be during the flowback (Figs. 14b, d and 15).
One more important detail is that fluid returns to the hydraulic fracture (Fig. 15) during flowback, while the pressure front moves away from the contact with a hydraulic fracture (Fig. 12a, c). This phenomenon is due the assumption of similar rheology for both injected and formation fluids. These disturbances will indefinitely decay with time but will never become zero (diffusion law).
5 Model Validation During Flowback
The proposed model of fluid flow in and out of rock discontinuities needs validation against field cases. In this section, we compare our discontinuity model with field observations during flowback.
5.1 Validation Technique
To validate the model during flowback, we used published field data with a history of fluid recovery from producing wells (Clarkson and Williams-Kovacs 2013; Williams-Kovacs et al. 2015). These published data we use for validation include the production rate, flowing casing pressure, and some other data required for our model, such as fluid viscosity, fracture half-length, flowback time, etc. There is no information about the pressure history \(p_{\text{HF}} \left( \tau \right)\) during injection and shut-in. We assume that the shut-in period, preceding the flowback, was sufficiently long time so the pressure in all the flooded discontinuities is everywhere equilibrated to pore pressure. Moreover, we consider that the discontinuities are uniformly distributed and have similar properties (\({\text{JRC}}\), \(\sigma_{{{\text{n}}, {\text{ref}}}}\), etc.). We consider two situations. In the first one, all discontinuities are horizontal (Fig. 16a); in the second one, they are vertical (Fig. 16b). The volume returning from discontinuities is

Schematic illustration of discontinuities (only one discontinuity wing is presented) adjusted to the one wing of a hydraulic fracture. Discontinuities are a bedding planes b natural fractures
where \(N_{\text{d}}\) is the number of discontinuities, and \(V_{{1{\text{d}}}}\) is the volume returning from one discontinuity, that is calculated via Eq. (42). Thus, the volume returning from discontinuities (47) can be rewritten to
here \(\tilde{v}_{{1{\text{d}}}}\) is the nondimensional fluid volume returning from one discontinuity.
Now consider the two most useful situations.
If the discontinuities are horizontal (\(\theta = 0\)), we can estimate their number as
where \(\Delta\) is the spacing between two neighboring discontinuities (Fig. 16a). The length of intersection between a hydraulic fracture and horizontal discontinuity is
Here, \(L_{\text{f}}\) is the hydraulic fracture half-length.
By analogy, the number of vertical discontinuities (\(\theta = {\raise0.7ex\hbox{$\pi $} \!\mathord{\left/ {\vphantom {\pi 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}}\)) is
and
\(H_{\text{f}}\) is the fracture height.
In both cases—vertical and horizontal discontinuities—we get
In all examples that we used for simulation, the pressure history is given. Thus, to calculate the nondimensional fluid volume returning from one discontinuity (42), we need only the nondimensional pressure \(p_{*}\), which is unknown. This magnitude is multiplied by the volume scaling factor \(V_{*}\) (53), which is also unknown, to get the volume returning from the discontinuities (48). We define the unknown pressure scale \(p_{*}\) (20) and the nondimensional to dimensional volume scaling factor \(V_{*}\) (53) by matching the pressure and volume with field data by means of a least-squares method.
Once we obtain \(p_{*}\) and \(V_{*}\), we convert them to the parameters that they depend on, i.e., \(p_{\text{p}} , \sigma_{\text{n}} , \sigma_{{{\text{n}}, {\text{ref}}}}\) for \(p_{*}\) and \(p_{\text{p}} , \sigma_{\text{n}} , \sigma_{{{\text{n}}, {\text{ref}}}} , {\text{a}}_{0} , {\text{JRC}}\) for \(V_{*}\). Some of those parameters, e.g., pore pressure \(p_{\text{p}}\) and fluid viscosity \(\mu\), are given in the publications used for validation, whereas others were chosen to satisfy the obtained values of \(p_{*}\) and \(V_{*}\). The number of unknown quantities can exceed the number of equations for them (Eqs. (20) and (53)). In this case, there are multiple solutions that satisfy our equations, and we chose one of them that seems most realistic to us.
5.2 Results
To validate our model during flowback, first we used the flowback data published in Clarkson and Williams-Kovacs (2013). That paper provides the wellbore pressure, pore pressure, fluid viscosity, compressibility, fracture half-length and height, and number of stages for two different wells. Fracture half-length and height were estimated by authors using RTA.
Both wells were drilled in the Marcellus shale. The well was hydraulically fractured with slickwater in 12 stages with three perforation clusters per stage. Stages were spaced at approximately 100 ft from each other. Approximately 6786 bbl of fluid and 113 tons of proppant pumped per stage. After the treatment, the wells were shut-in before the beginning of flowback for 3 weeks and 1 month for examples 1 and 2, respectively.
Flowing casing pressure (Fig. 17a, b, orange curve) is the critical input parameter for our model. It gives necessary insight into the history of a recovery process. To provide more accurate modeling, the pressure distribution inside the discontinuities is required. However, it looks impossible to measure this pressure distribution, or find it in literature. Hence, we assume it is equal to the pore pressure, which is likely after the extended shut-in. Some other parameters given in the publication are presented in Table 4.

Flowback data: flowing casing pressure and recovered volume [Examples 1 (a) and 2 (b) from Clarkson and Williams-Kovacs (2013)]
Using the technique described above, we got the following results:
-
\(p_{*} = 63.3\) MPa, \(V_{*} = 478\) m3 for example 1
-
\(p_{*} = 11.6\) MPa, \(V_{*} = 497\) m3 for example 2
The results of the simulations are presented in Fig. 17. We can see good agreement between the numerical solutions and the field data in both field cases.
Since typical Marcellus Shale well is drilled 1500 to 2700 m vertically, typical normal stresses applied to discontinuities range from 40 to 80 MPa (Fig. 21). From the obtained \(p_{*}\) and \(V_{*}\), we get the values for discontinuity parameters shown in Table 3.
The second part of flowback model validation used the field data published by Williams-Kovacs et al. (2015). The example given in Williams-Kovacs et al. (2015) examines a field case typical for unconventional plays in North America. The subject well was a multi-fractured horizontal well drilled and completed in a tight oil reservoir in the Western Canadian Sedimentary Basin. The well was hydraulically fractured in 25 stages spaced at approximately 74 m using a cemented liner with sliding sleeve technology. Approximately 51 m3 of fluid and 12 ton of proppant were injected per stage (Table 5).
Williams-Kovacs et al. (2015) provide fewer parameters needed to run the model than the previous example. The given input parameters for our model are flowing casing pressure (Fig. 18, orange curve), pore pressure, fracture half-length, and the number of stages (Table 6).

Flowback data from Williams-Kovacs et al. (2015): flowing casing pressure and validation results
From calibration of our model on casing pressure data, we get \(p_{*} = 29\) MPa and \(V_{*} = 351\) m3. We assume that the treatment fluid was slickwater, so the viscosity is \(\mu = 1\) cP and compressibility is \(B_{\text{f}} = 4.5 \times 10^{ - 10}\) Pa−1. We also assume that the fracture height is 10 m. The calculated magnitudes of the discontinuity parameters are as presented in Table 7.
5.3 Comparison with the Carter Model
One of the key features of the discontinuity model with respect to the Carter one is that the discontinuity model has more flexibility for calibration. As discussed above, there are two parameters that control the volume returning from discontinuities (\(p_{*}\) and \(V_{*}\)). The dependency on \(V_{*}\) is linear whereas the dependency on \(p_{*}\) is nonlinear but monotonous. This nonlinear model dependency on \(p_{*}\) provides us with the instrument to fit a large class of field data, that cannot be fitted by a Carter leakoff model, where the volume returning from discontinuities is controlled by one coefficient only.
We compare two models. The first one (Carter leakoff model) assumes that only the rock matrix participates in fluid inflow to a hydraulic fracture whereas the second one (the presented discontinuity model) assumes that only rock discontinuities contribute to flowback. Consider an example. From our synthetic field example on fluid recovery, it is known that the flow rate from a hydraulic fracture to a wellbore at the pressure drop of 8 MPa will be 16 m3 per day. The Carter leakoff model, which is linear on pressure drop, can already be defined, whereas the discontinuity model needs additional measurements to be calibrated due to nonlinearity. The properties that have the greatest impact on nonlinearity of our model include in situ stresses and may be rock mineralogy as related to the value of \(\sigma_{{{\text{n}}, {\text{ref}} }}\). There are two bounding cases: rigid and compliant discontinuities. Compliant discontinuities are likely to be present in clay-rich formations. They are more susceptible to the pressure change than the rigid ones, which are characteristics of quartz-rich formations. Other rock types will be situated between these two bounding curves. From Fig. 19 we see that the discontinuity model plays an important role in clay-rich formations (or other formations with compliant discontinuities), where the matrix permeability is very low. In the case of a quartz-rich formation, there is not a large difference between our model and the Carter model.

Comparison of the Carter and discontinuity models on the example of validation on field data, when one point is known
6 Scale-Based Estimations
Previously, the entire analysis was done in terms of nondimensional quantities, which may obscure the physical range of their values. This chapter aims to provide a detailed description of all dimensional values we used and the estimations of dimensional parameters we obtained.
6.1 Estimation of Physical Parameters and Their Scales
6.1.1 Pore Pressure
Pore pressure \(p_{\text{p}}\) [Pa] is the pressure of fluid contained within the pore space of a rock. In many formations, vertical distribution of the pore pressure along the vertical coordinate \(z\) can be roughly estimated by the hydrostatic pressure (Zhang 2011):
where \(\rho\) is the fluid density [kg/m3], \(g = 9.81\) m/s2 is the gravity acceleration, and \(z\) is the true vertical depth [m]. Fluid density is typically between 800 and 1300 kg/m3 (Batzle and Wang 1992; Godefroy et al. 2008). The pore pressure calculated via Eq. (54) with substituted fluid density depending on the depth is presented in Fig. 20.

Pore pressure calculated using hydrostatic approximation [Eq. (54)] over wide range of true vertical depths
6.1.2 Normal Stress
Brown and Hoek (1978) tabulated and analyzed a substantial dataset of stress measurements. According to the results of their study, vertical stress \(\sigma_{\text{v}}\) in [Pa] (blue line in Fig. 21) can be expressed approximately as
where \(k = 0.027\) [MPa/m] is the ratio of vertical stress to true vertical depth \(z\) [m], which can be determined from density logs.

Vertical and average horizontal stress ranges for different true vertical depths
The authors also analyzed the average horizontal stress \(\sigma_{{{\text{h}}, {\text{av}}}}\), and concluded that it typically lies in the following range in [MPa] (gray area in Fig. 21):
where \(\sigma_{{{\text{h}}, {\text{av}},0,{ \hbox{min} }}} = 2.7\) MPa and \(\sigma_{{{\text{h}}, {\text{av}},0,{ \hbox{max} }}} = 40.5\) MPa are the minimum and maximum average horizontal stress at zero depth (\(z = 0\)) and \(k_{1} = 0.008\) MPa/m, \(k_{2} = 0.014\) MPa/m are the minimum and maximum ratio of relative average horizontal stress (\(\sigma_{{{\text{h}}, {\text{av}}}} - \sigma_{{{\text{h}}, {\text{av}},0}}\)) to true vertical depth \(z\).
Moreover, they obtained the following relation for the average horizontal stress limited to the US land only (red line in Fig. 21):
where \(\sigma_{{{\text{h}}, {\text{av}},0}}\) is the average horizontal stress at zero depth (\(z = 0\)), \(k = 0.022\) MPa/m is the ratio of relative average horizontal stress.
According to Eq. (1), the normal stress applied to discontinuities is a certain combination of the vertical and horizontal stresses, which depends on their orientation.
6.1.3 Reference Stress
Reference stress \(\sigma_{{{\text{n}}, {\text{ref}}}}\) [MPa] is the effective normal stress applied to a discontinuity to cause a 90% reduction in aperture. Willis-Richards et al. (1996) applied their model for aperture Eq. (11) to laboratory measurements and determined minimum and maximum values of \(\sigma_{{{\text{n}}, {\text{ref}}}}\) for hot dry rocks of 10 and 26 MPa, respectively. However, according to experiments by Chen et al. (2000), the reference stress in granitic rocks can be up to 180 MPa, and Durham and Bonner’s (1994) results provide even higher values of reference stresses (more than 200 MPa) for granitic rocks.
We assume that the reference stress varies from 10 to 300 MPa, which fits well with the field data (see the previous section for details).
6.1.4 Pressure Scale
The pressure scale \(p_{*}\) introduced in Eq. (20) for nondimensionalization of the model equations can be estimated from the range of possible normal stresses, pore pressures, and reference stresses given above. Substituting these in Eq. (20), the expected range of pressure scales \(p_{*}\) appears to be from 5 to 110 MPa.
6.1.5 Aperture
The aperture scale \(a_{*}\) given by Eq. (11) is the aperture of a discontinuity if the pressure of the fluid were equal to the initial pore pressure. Zero-stress aperture \(a_{0}\) of the preexisting rock discontinuities varies for granitic rocks between 0.02 and 0.08 mm (Chen et al. 2000). According to the same study, the relative shear displacement \(u_{\text{s}}\) may vary from 0 to 1 mm, and the dilation angle \(\phi_{\text{dil}}^{\text{eff}}\) range is from \(1.5^\circ \;{\text{to}}\;10^\circ\) (Willis-Richards et al., 1996; Chen et al., 2000). For this set of parameters, \(a_{{0,{\text{s}}}}\) (Eq. (10)) changes from 0.02 to 0.26 mm. Additionally, taking the range of rock stresses and pressures above, we suggest that the aperture scale \(a_{*}\) may vary from 0.0002 to 0.26 mm.
6.1.6 Joint Roughness Coefficient
JRC is the dimensionless joint roughness coefficient, which is reported to vary for fractures in rock from 0 to 20 (see Fig. 8). However, our validation and the experiments performed by Chen et al. (2000) both showed that the most reliable values for \({\text{JRC}}\) are typically between 9 and 15.
6.1.7 Conductivity
The conductivity scale \(c_{*}\) is the conductivity of a discontinuity under internal pressure equal to the initial pore pressure of rock. It scales with the aperture scale \(a_{*}\) [m] and the joint roughness coefficient JRC [–]. According to the generic values above, we estimate the conductivity of preexisting discontinuities to be within a \(2 \times 10^{ - 24} \;{\text{to}}\; 1.6 \times 10^{ - 11}\) m3 range. This corresponds to \(2.6 \times 10^{ - 17} \;{\text{to}}\;5.2 \times 10^{3}\) md-ft.
Fredd et al. (2001) performed a series of laboratory conductivity experiments with fractured cores from the Texas Cotton Valley sandstone formation. The cores were fractured lengthwise before the flow tests were performed. After the effective closure pressure was set, brine was injected through the fracture for 18 to 22 h at a constant flow rate. During this period, the conductivity reached a stabilized value. Then, the fracture width was measured, and the conductivity was calculated according to Darcy’s law.
Figure 22a, b compares the results obtained via our formula for conductivity (12) with the results for unpropped fractures by Fredd et al. (2001) (gray area with black dashed contour).

Discontinuity conductivity over a wide range of effective closure pressure (\(\sigma_{\text{n}} - p\)). The gray area on both plots corresponds to the results of estimations of Fredd et al. (2001). a Discontinuity conductivity at fixed reference stress \(\sigma_{{{\text{n}},{\text{ref}}}} = 200\) MPa and \(a_{0} = 0.3\) mm for different JRC: blue (JRC \(\ge\) 9), orange (JRC \(\ge\) 12), and green (JRC \(\ge\) 15) areas; the maximum conductivity for each of these JRC: blue, orange, and green lines, respectively. b Discontinuity conductivity at fixed reference stress \(\sigma_{{{\text{n}},{\text{ref}}}} = 200\) MPa for different zero-stress aperture: blue (\(a_{0} \le\) 0.3 mm), orange (\(a_{0} \le\) 0.08 mm), and green (\(a_{0} \le\) 0.03 mm) areas; the maximum conductivity for each of these \(a_{0}\): blue, orange, and green lines, respectively
As the minimum conductivity is negligibly small, let us find the upper limit. We fix the largest discontinuity aperture \(a_{*}\), which is 0.3 mm, and consider three different values of JRC. For each of them, we find the maximum value of conductivity (blue, orange, and green lines in Fig. 22a). The areas above these curves that continue to zero (which suggests that the red area overlaps the blue one, and the green area overlaps both blue and red areas) correspond to smaller magnitudes of \(a_{*}\) with \({\text{JRC}} = 9, 12, 15\) for blue, orange, and green areas, respectively.
We fix the minimum joint roughness coefficient \({\text{JRC}} = 9\) and consider different values of \(a_{*}\). For each of them, we find the maximum value of conductivity (blue, orange, and green lines in Fig. 22b). The areas above these curves that continue to zero (which suggests that the red area overlaps the blue one, and the green area overlaps both blue and red areas) correspond to larger magnitudes of JRC with \(a_{ *} = 0.3, 0.08, 0.03\) mm for blue, orange, and green areas, respectively.
If we apply our model to the fractured cores from the Texas Cotton Valley sandstone formation by Fredd et al. (2001), we see that the aperture of the fractures used in laboratory tests should be about \(0.1 \ldots 0.3\) mm (Fig. 22b) while joint roughness coefficient JRC can take any value from its range.
6.1.8 Intersection Length
In this work, we consider a rectangular fracture with half-length \(L_{\text{f}}\) and height \(H_{\text{f}}\). The volume returning from the discontinuity is proportional to the intersection length between the hydraulic fracture and the discontinuity. If other properties of the discontinuities are similar, the total volume returning will be proportional to the sum of the length of their intersections, which is the total intersection length. However, in this work, we will use the average length of discontinuities. It is the length of a discontinuity with averaged dip angle crossing a rectangular hydraulic fracture. This length is a function of dip angle \(\theta\):
Then, the number of discontinuities is \(N_{\text{d}} = \frac{{l_{\text{total}} }}{l}\). Equation (58) is presented in Fig. 23.

The dependence of the intersection length between a hydraulic fracture and a discontinuity on the dip angle for a hydraulic fracture with \(H_{\text{f}} = 30\) m, \(L_{\text{f}} = 100\) m
6.1.9 Fluid Density
We consider slightly compressible fluid flow. In this case, fluid density \(\rho\) changes with pressure linearly:
Typical fluid density at standard conditions \(\rho_{0}\) varies from 800 to 1300 kg/m3. Here we use our assumption that the injected fluid has the same rheology as the pore fluid. Fluid compressibility \(B_{\text{f}}\) [Pa−1] for slightly compressible fluid ranges from \(10^{ - 10}\) to \(10^{ - 9}\) Pa−1. In this case \(g\left( \varPi \right)\) (Eq. (25)) and \(g^{'} \left( \varPi \right)\) are of the order of \(10^{ - 2}\). Our assumption of neglecting the terms related to the density change in the governing Eq. (28) is justified, so that we can consider simplified Eq. (34) instead of the more general Eq. (28).
6.1.10 Discontinuity Stiffness
If the injected fluid is slightly compressible and the discontinuity is “rigid”, i.e., the discontinuity aperture changes insignificantly under applied pressure, we can neglect the terms related to both fluid and discontinuity compressibility. Then, the governing Eq. (28) can be simplified to Eq. (35). From the mathematical point of view, we can neglect this effect, if
The “insignificance” of aperture change can be interpreted according to the required accuracy of a solution. In this work, we assume that the discontinuity is incompressible if \(\left| {\gamma_{\text{HF}} } \right| < 0.1\). For these values of \(\gamma_{\text{HF}}\) the discrepancy between the solutions obtained via Eqs. (28) and (35) will be less than 6%.
6.2 Dimensional Volumetric Analysis
Let us consider a hydraulic fracture connected to a wellbore, which is characterized by half-length \(L_{\text{f}}\)[m], height \(H_{\text{f}}\)[m], and width \(w_{\text{f}}\)[m]. The hydraulic fracture is also connected to a network of preexisting rock discontinuities (Fig. 5c, d). As was discussed earlier, the mechanical properties (e.g., orientation, aperture, and conductivity) vary from one group of discontinuities (i.e., discontinuities with similar properties) to another. If there are several groups of discontinuities, we will “average” them and consider only one group of discontinuities with “mean” properties. This approach will be adequate to estimate the role of rock discontinuities in injected fluid storage. Mechanical properties of this group of discontinuities are predefined and do not depend on the fracturing treatment. We will assume that the volume that we inject in each hydraulic fracture \(V_{{{\text{inj}}/{\text{HF}}}}\) [m3] is stored within this hydraulic fracture and preexisting rock discontinuities. The leakoff into the rock matrix is neglected due to its low permeability.
The volume of fluid stored in a hydraulic fracture \(V_{\text{f}}\)[m3] is estimated as
where \(\varphi_{\text{p}}\) is the proppant pack porosity. It is assumed that the fracture is homogeneously filled by proppant.
The other part of the injected fluid volume penetrates rock discontinuities. The total leakoff volume per fracture \(V_{{{\text{LO}}/{\text{HF}}}}\)[m3] is
Let us estimate the maximum total leakoff volume. According to our observations, the total injected volume per stage can be about 1000 m3 or less. For five fractures in a stage, approximately 200 m3 of this injected volume enters each hydraulic fracture. If the hydraulic fracture has the following dimensions \(L_{\text{f}} = 100\) m, \(H_{\text{f}} = 30\) m, \(w_{\text{f}} = 1\) cm, and the proppant pack porosity \(\varphi_{\text{p}} = 0.3\), the volume stored in it will be about \(20\) m3 as per Eq. (61). Thus, the maximum total leakoff volume per fracture that penetrates the network of connected discontinuities can be about 180 m3.
According to Eq. (1), the normal stress \(\sigma_{\text{n}}\)[Pa] applied to a discontinuity depends on the three principal stresses and the averaged discontinuity orientation in space. In formations, where all three principal stresses are almost equal, the applied normal stress does not depend on orientation, and the conductivities of vertical and horizontal discontinuities are almost the same. When the difference between vertical and horizontal in situ stresses is large, the conductivities of discontinuities with different orientation are rather distinct.
Let us take an example of a formation with \(p_{\text{p}} = 40\) MPa, \(\sigma_{\text{v}} = 70\) MPa, \(\sigma_{\text{H}} = \sigma_{\text{h}} = 41\) MPa. In such formation, the normal stress applied to subhorizontal discontinuities (e.g., bedding planes) is \(\sigma_{{{\text{n}},{\text{BP}}}} = 70\) MPa, while the normal stress applied to subvertical discontinuities (e.g., natural fractures) is \(\sigma_{{{\text{n}},{\text{NF}}}} = 41\) MPa as per Fig. 24. Note, that here the in situ stresses correspond to the normal-stress regime (\(\sigma_{\text{v}} > \sigma_{\text{H}} \ge \sigma_{\text{h}}\)), but the discontinuity model works correctly for other stress regimes.

a Side view of hydraulic fracture with joint discontinuities, that cross this vertical hydraulic fracture at a dip angle \(\theta\) (\(\theta \approx 0\) corresponds to subhorizontal discontinuities, \(\theta \approx {\raise0.7ex\hbox{$\pi $} \!\mathord{\left/ {\vphantom {\pi 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}}\) comply with subvertical discontinuities). The normal stress applied to them is similar and equal to \(\sigma_{\text{n}}\). b Normal stress applied to discontinuities depending on dip angle in the formation with \(\sigma_{\text{v}} = 70\) MPa, \(\sigma_{\text{H}} = \sigma_{\text{h}} = 41\) MPa
6.2.1 Distance of Fluid Leakoff
Now we analyze how the fluid propagation distance depends on the discontinuity orientation. As in the previous example, let us fix the total leakoff volume per fracture \(V_{{{\text{LO}}/{\text{HF}}}} = 50\) m3 and vary the dip angle from \(0\) (which corresponds to the dip angle of horizontal discontinuities) to \({\raise0.7ex\hbox{$\pi $} \!\mathord{\left/ {\vphantom {\pi 2}}\right.\kern-0pt} \!\lower0.7ex\hbox{$2$}}\) (which is the dip angle of vertical discontinuities). We suppose that all discontinuities have similar properties. According to Eq. (46), the fluid front is a complicated function of many quantities. So, the fluid propagation distance is the result of the simultaneous change of several parameters. We see from Fig. 25 that more discontinuities residing in the formation lead to less fluid propagation distance. This can be explained by the volume that must enter into one discontinuity. For example, for 10 discontinuities, the volume that enters in each one is 5 m3, whereas for 1000 discontinuities, the volume is \(0.05\) m3.

Fluid front propagation as a function of dip angle \(\theta\) for different number of discontinuities \(N_{\text{d}}\). Blue, orange, yellow, and purple lines correspond to the number of discontinuities of 10, 100, 1000, and 10,000, respectively
6.2.2 Recovery of Injected Fluid from Discontinuities
When the fracture is put on flowback, the injected fluid returns from the discontinuities back to a hydraulic fracture. According to the piston-like displacement model that we use, the injected fluid returns first, followed by the formation fluid, which reside in discontinuities. The formation fluid starts to be produced from discontinuities immediately after the injected fluid is completely recovered.
In this study, we estimate the percentage of the injected fluid volume produced during the first 24 h of flowback. The flowback was performed under constant flowback pressure \(p_{\text{fb}} = 37\) MPa. For the estimation, we consider a rectangular hydraulic fracture with a half-length \(L_{\text{f}} = 100\) m, height \(H_{\text{f}} = 30\) m, and average width \(w_{\text{f}} = 1\) cm, which connects with a network of conductive discontinuities. The total leakoff volume per hydraulic fracture is \(V_{{{\text{LO}}/{\text{HF}}}} = 50\) m3. During injection, this volume has entered preexisting natural discontinuities with the following mechanical properties: \(\sigma_{{{\text{n}},{\text{ref}}}} = 150\) MPa, \(p_{\text{p}} = 40\) MPa, \(a_{0} = 0.08\) mm, \({\text{JRC}} = 9\), and the in situ stresses \(\sigma_{\text{v}} = 70\) MPa, \(\sigma_{\text{H}} = \sigma_{\text{h}} = 41\) MPa.
There are two parameters that affect the recovery of the injected fluid. The first is the conductivity of a discontinuity, which increases with the dip angle \(\theta\). The second parameter is the length of intersection between a discontinuity and the hydraulic fracture. According to Eq. (58), the length (and consequently the ability to imbibe the fluid) increases with \(\theta\) until \(\theta_{*} = { \arctan }\frac{{H_{\text{f}} }}{{L_{\text{f}} }}\), and then it decreases. Figure 26 shows that competition between these quantities results in a nonmonotonic dependency of the percentage of injected volume recovery. Earlier in this work, we showed that field observations reported that a small percentage of fluid recovery is typical. This low recovery is explained by the results shown in Fig. 26. We see that the horizontal and subhorizontal discontinuities are less likely to return the injected fluid than the vertical and subvertical ones.

Percentage of injected fluid recovered after 24 h of flowback over a wide range of dip angles for different number of discontinuities \(N_{d}\) (blue, orange, and yellow lines)
7 Conclusions
Many authors have reported significant losses of fluid injected during fracturing treatment of a well, which is not recovered during flowback and production. Laboratory experiments showed that preexisting rock discontinuities (natural fractures, bedding planes, and others) play a substantial role in the leakoff of injected fluid from hydraulically created fractures. In this work, we showed the important role of discontinuities in trapping of injected fluid volumes from rock. To do that, we considered the entire process of fluid flow in and out of discontinuities during subsequent stages: injection, shut-in, and flowback stages.
Rock discontinuities have a different ability to store and produce the injected fluid related to their different mechanical properties and spatial orientation in rock. The conductivity of a discontinuity is a strong stress- and pressure-dependent function, as opposed to the tight rock matrix. This makes the developed model substantially different than classical models for conventional unfractured rocks. We recognized two different regimes of fluid flow in discontinuities: linear and nonlinear. The regime depends on the stress and pressure conditions applied to the discontinuities and their mechanical properties (e.g., roughness, aperture). In the nonlinear regime, a large volume of injected fluid may not be recovered during flowback. This occurs because the aperture at the contact with a hydraulic fracture is reduced during pressure drawdown in a well due to high compliance of a discontinuity to pressure. As a result, compliant discontinuities have a lower flowback rate compared to the rate of leakoff, and trap injected fluid in them.
We validated the model with published flowback field data. The discontinuity model can describe the flow rate in the mechanically closed fractures with sufficient accuracy (20%). A nonlinear flow regime explains the flow rates observed in the field, which cannot be explained by a simplified linear inflow model.
We estimated that the depth of fluid penetration into the discontinuities ranges from several centimeters to several meters away from the contact with a hydraulic fracture. We also provided estimations for the volume accumulated in the discontinuities.
Overall, the developed model and the results of this work are recommended for use in commercial fracture design tools, flowback and production simulators. The model has the advantage of explicit modeling of fluid flow along natural conductive channels in rock and helps to create a realistic 3D picture of injected fluid distribution in rock after the fracturing treatment, as well as during flowback. It can also help in assessment of volumes and spatial regions of unrecoverable fluid trapped by the discontinuities.
Abbreviations
- \(B_{\text{f}}\) :
-
Fluid compressibility (Pa−1)
- \(H_{\text{f}}\) :
-
Fracture height (m)
- \({\text{JRC}}\) :
-
Joint roughness coefficient (–)
- \(L_{\text{f}}\) :
-
Fracture half-length (m)
- \(L_{\text{front}}\) :
-
Depth of fluid penetration into discontinuity (m)
- \(L_{*}\) :
-
Length scale (m)
- \(N_{\text{d}}\) :
-
Number of discontinuities (–)
- \(T_{1}\) :
-
Fracture closure time (s)
- \(T_{2}\) :
-
Time where flowback begins (s)
- \(T_{*}\) :
-
Time scale (s)
- \(V\) :
-
Volume returning from discontinuities (m3)
- \(V_{{1{\text{d}}}}\) :
-
Volume returning from one discontinuity (m3)
- \(V_{\text{f}}\) :
-
Volume of fluid stored in a hydraulic fracture (m3)
- \(V_{{{\text{inj}}/{\text{HF}}}}\) :
-
Volume injected per fracture (m3)
- \(V_{{{\text{LO}}/{\text{HF}}}}\) :
-
Total leakoff volume per fracture (m3)
- \(V_{*}\) :
-
Volume scaling factor (m3)
- \(a\) :
-
Aperture of a discontinuity (mm)
- \(\tilde{a}\) :
-
Nondimensional aperture (–)
- \(a_{0}\) :
-
Zero-stress aperture of discontinuity (mm)
- \(a_{{0,{\text{s}}}}\) :
-
Shear-induced aperture of a discontinuity at zero effective stress (mm)
- \(a_{*}\) :
-
Aperture scale (mm)
- \(c\) :
-
Conductivity of a discontinuity (mD-ft)
- \(\tilde{c}\) :
-
Nondimensional conductivity (–)
- \(c_{*}\) :
-
Conductivity scale (mD-ft)
- \(g\) :
-
Gravity acceleration (m/s2)
- \(k\) :
-
Ratio of vertical stress to true vertical depth (MPa/m)
- \(k_{1}\) :
-
Minimum ratio of relative average horizontal stress to true vertical depth (MPa/m)
- \(k_{2}\) :
-
Maximum ratio of relative average horizontal stress to true vertical depth (MPa/m)
- \(l\) :
-
Length of intersection between a hydraulic fracture and discontinuity (m)
- \(l_{\text{front}}\) :
-
Nondimensional depth of fluid penetration into discontinuity (–)
- \(l_{\text{m}}\) :
-
Scale transformation factor from microns to the units of choice (meter) (–)
- \(p\) :
-
Fluid pressure (MPa)
- \(p_{\text{fb}}\) :
-
Flowback pressure (MPa)
- \(p_{\text{tr}}\) :
-
Treatment pressure (MPa)
- \(p_{*}\) :
-
Pressure scale (MPa)
- \(p_{\text{HF}}\) :
-
Fluid pressure in fracture (MPa)
- \(p_{\text{p}}\) :
-
Pore pressure (MPa)
- \(q\) :
-
Flow rate per unit length (m2/s)
- \(\tilde{q}\) :
-
Nondimensional flow rate per unit length (–)
- \(q_{*}\) :
-
Flow rate per unit length scale (m2/s)
- \(t\) :
-
Time (s)
- \(u_{\text{s}}\) :
-
Relative shear displacement of fracture wall faces (mm)
- \(v\) :
-
Volume of fluid stored in a discontinuity (m3)
- \(\tilde{v}\) :
-
Nondimensional volume of fluid stored in a discontinuity (–)
- \(\tilde{v}_{{1{\text{d}}}}\) :
-
Nondimensional volume returning from one discontinuity (–)
- \(v_{*}\) :
-
Volume scale (m3)
- \(w_{\text{f}}\) :
-
Fracture width (mm)
- \(x\) :
-
Coordinate along a discontinuity (m)
- \(z\) :
-
True vertical depth (m)
- \(\gamma_{\text{HF}}\) :
-
Nondimensional pressure in fracture (–)
- \(\gamma_{\text{fb}}\) :
-
Nondimensional flowback pressure (–)
- \(\gamma_{\text{tr}}\) :
-
Nondimensional treatment pressure (–)
- \(\Delta\) :
-
Spacing between two neighboring discontinuities (m)
- \(\vartheta\) :
-
Dip angle (–)
- \(\mu\) :
-
Fluid viscosity (cP)
- \(\tilde{\mu }\) :
-
Nondimensional fluid viscosity (–)
- \(\mu_{*}\) :
-
Fluid viscosity scale (cP)
- \(\xi\) :
-
Nondimensional coordinate (–)
- \(\varPi\) :
-
Nondimensional pressure (–)
- \(\rho\) :
-
Fluid density (kg/m3)
- \(\tilde{\rho }\) :
-
Nondimensional fluid density (–)
- \(\rho_{0}\) :
-
Fluid density at standard condition (kg/m3)
- \(\sigma_{\text{h}}\) :
-
Minimum horizontal stress (MPa)
- \(\sigma_{{{\text{h}}, {\text{av}}}}\) :
-
Average horizontal stress (MPa)
- \(\sigma_{{{\text{h}}, {\text{av}},0,{ \hbox{max} }}}\) :
-
Maximum average horizontal stress at zero depth (MPa)
- \(\sigma_{{{\text{h}}, {\text{av}},0,{ \hbox{min} }}}\) :
-
Minimum average horizontal stress at zero depth (MPa)
- \(\sigma_{\text{H}}\) :
-
Maximum horizontal stress (MPa)
- \(\sigma_{\text{n}}\) :
-
Normal stress applied to a discontinuity (MPa)
- \(\sigma_{\text{n}}^{{\prime }}\) :
-
Effective normal stress applied to a discontinuity (MPa)
- \(\sigma_{{{\text{n}},{\text{BP}}}}\) :
-
Normal stress applied to bedding planes (MPa)
- \(\sigma_{{{\text{n}},{\text{NF}}}}\) :
-
Normal stress applied to natural fractures (MPa)
- \(\sigma_{{{\text{n}}, {\text{ref}}}}^{'}\) :
-
Reference stress (MPa)
- \(\sigma_{\text{v}}\) :
-
Vertical stress (MPa)
- \(\tau\) :
-
Nondimensional time (–)
- \(\tau_{1}\) :
-
Fracture closure nondimensional time (–)
- \(\tau_{2}\) :
-
Nondimensional time where flowback begins (–)
- \(\phi_{\text{dil}}^{\text{eff}}\) :
-
Effective shear dilation angle (–)
- \(\varphi\) :
-
Azimuth angle (–)
- \(\varphi_{\text{p}}\) :
-
Proppant pack porosity (–)
References
Abbasi, M.A.: A Comparative Study of Flowback Rate and Pressure Transient Behaviour in Multifractured Horizontal Wells. ERA, Flinders Park (2013)
Alkouh, A., Mcketta, S., Wattenbarger, R.A.: Estimation of effective fracture volume using water flowback and production data for shale gas wells. SPE Hydraul. Fract. Technol. Conf. (2013). https://doi.org/10.2118/166279-MS
Anderson, E.M.: The dynamics of faulting and dyke formation with applications to Britain. Book (1951). https://doi.org/10.3109/07434618.2013.815801
Barton, N., Bandis, S., Bakhtar, K.: Strength, deformation and conductivity coupling of rock joints. Int. J. Rock Mech. Min. Sci. 22(3), 121–140 (1985). https://doi.org/10.1016/0148-9062(85)93227-9
Barton, N., Choubey, V.: The shear strength of rock joints in theory and practice. In: Rock Mechanics, vol. 10 (1977)
Batzle, M., Wang, Z.: Seismic properties of pore fluids. Geophysics 57(11), 1396–1408 (1992). https://doi.org/10.1190/1.1443207
Brown, E.T., Hoek, E.: Trends in relationships between measured in situ stresses and depth. Int. J. Rock Mech. Min. Sci. (1978). https://doi.org/10.1016/0148-9062(78)91227-5
Carslaw, H.S., Jaeger, J.C.: Conduction of Heat in Solids. Clarendon Press, Oxford (1986)
Chen, Z., Narayan, S.P., Yang, Z., Rahman, S.S.: An experimental investigation of hydraulic behaviour of fractures and joints in granitic rock. Int. J. Rock Mech. Min. Sci. 37(7), 1061–1071 (2000). https://doi.org/10.1016/S1365-1609(00)00039-3
Clarkson, C.R., Williams-Kovacs, J.: Modeling two-phase flowback of multifractured horizontal wells completed in shale. SPE J. 18(04), 795–812 (2013). https://doi.org/10.2118/162593-PA
Durham, W.B., Bonner, B.P.: Self-propping and fluid flow in slightly offset joints at high effective pressures. J. Geophys. Res. (1994). https://doi.org/10.1029/94JB00242
Economides, M.J., Nolte, K.G.: Reservoir Stimulation. Wiley, Hoboken (2000)
Fredd, C.N., McConnell, S.B., Boney, C.L., England, K.W.: Experimental study of fracture conductivity for water-fracturing and conventional fracturing applications. SPE J. 6(03), 288–298 (2001). https://doi.org/10.2118/74138-PA
Gale, J.F.W., Laubach, S.E., Olson, J.E., Eichhubl, P., Fall, A.: Natural fractures in shale: a review and new observations. AAPG Bull. 98(11), 2165–2216 (2014). https://doi.org/10.1306/08121413151
Godefroy, S.N., Zuo, J.Y., Fujisawa, G., Keefe, M.D., Ardila, M., Canas, J.A., De Santo, I., Cig, K.: Discussion on Formation Fluid Density Measurements and Their Applications (2008). https://doi.org/10.2118/114648-ms
Griffith, C., McClure, M.: Insights from pressure transients at observation wells near hydraulically fractured wells in a domestic shale play. Interpretation 4(4), T567–T576 (2016). https://doi.org/10.1190/INT-2015-0182.1
Houzé, O., Viturat, D., Fjaere, O., Trin, S.: Dynamic data analysis. In: Kappa Engineering (2017)
Jaeger, J.C., Cook, N.G.W., Zimmerman, R.W.: Fundamentals of rock mechanics fourth edition. In: Rock mechanics (2007). https://doi.org/10.1111/jocn.12732
Kappa company website: https://www.kappaeng.com/
Kondash, A.J., Albright, E., Vengosh, A.: Quantity of flowback and produced waters from unconventional oil and gas exploration. Sci. Total Environ. 574, 314–321 (2017). https://doi.org/10.1016/j.scitotenv.2016.09.069
Llanos, E.M., Jeffrey, R.G., Hillis, R., Zhang, X.: Hydraulic fracture propagation through an orthogonal discontinuity: a laboratory, analytical and numerical study. Rock Mech. Rock Eng. 50(8), 2101–2118 (2017). https://doi.org/10.1007/s00603-017-1213-3
Singh, K.K., Singh, D.N., Gamage, R.P.: Effect of sample size on the fluid flow through a single fractured granitoid. J. Rock Mech. Geotech. Eng. (2016). https://doi.org/10.1016/j.jrmge.2015.12.004
Stanchits, S., Desroches, J., Burghardt, J., Surdi, A., Whitney, N.: Rock fabric influence on hydraulic fracture propagation. In: 77th EAGE Conference and Exhibition (2015). https://doi.org/10.3997/2214-4609.201412632
Suarez-Rivera, R., Burghardt, J., Stanchits, S., Edelman, E., Surdi, A.: Understanding the effect of rock fabric on fracture complexity for improving completion design and well performance. Int. Pet. Technol. Conf. (2013). https://doi.org/10.2523/17018-MS
Valko, P., Economides, M.J.: Hydraulic Fracture Mechanics. Wiley, Chichester (1995)
Walsh, J.B.: Effect of pore pressure and confining pressure on fracture permeability. Int. J. Rock Mech. Min. Sci. (1981). https://doi.org/10.1016/0148-9062(81)90006-1
Walton, I., McLennan, J.: The role of natural fractures in shale gas production. In: Effective and Sustainable Hydraulic Fracturing (2013). https://doi.org/10.5772/56404
Wang, J., Elsworth, D.: Hydraulic fracturing with leakoff in a dual porosity medium. ARMA (2017). https://doi.org/10.1016/j.ijrmms.2018.04.042
Weng, X., Kresse, O., Chuprakov, D., Cohen, C.E., Prioul, R., Utpal Ganguly, S., Ganguly, U.: Applying complex fracture model and integrated workflow in unconventional reservoirs. J. Pet. Sci. Eng. (2014). https://doi.org/10.1016/j.petrol.2014.09.021
Williams-Kovacs, J.D., Clarkson, C.R., Zanganeh, B.: Case studies in quantitative flowback analysis. SPE (2015). https://doi.org/10.2118/175983-MS
Willis-Richards, J., Watanabe, K., Takahashi, H.: Progress toward a stochastic rock mechanics model of engineered geothermal systems. J. Geophys. Res.: Solid Earth 101(B8), 17481–17496 (1996). https://doi.org/10.1029/96JB00882
Zhang, J.: Pore pressure prediction from well logs: methods, modifications, and new approaches. Earth Sci. Rev. (2011). https://doi.org/10.1016/j.earscirev.2011.06.001
Zhou, J.Q., Hu, S.H., Fang, S., Chen, Y.F., Zhou, C.B.: Nonlinear flow behavior at low Reynolds numbers through rough-walled fractures subjected to normal compressive loading. Int. J. Rock Mech. Min. Sci. 80, 202–218 (2015). https://doi.org/10.1016/j.ijrmms.2015.09.027
Acknowledgements
The authors wish to thank Dr. Dean Willberg for the idea of this study, Dr. Maxim Chertov, Dr. Xiaowei Weng, and Dr. Pavel Spesivtsev for deep technical review of this work. We are also thankful to Dr. Konstantin Sinkov, Dr. Denis Syresin and Dr. Boris Krasnopolsky for constructive discussions; Dr. Sergey Stanchits, Dr. Ella Maria Llanos, Dr. Julia Gale, and Dr. Nick Barton for permission to use their materials in this paper. We appreciate Schlumberger company for permission to publish this work.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ipatova, A., Chuprakov, D. Role of Preexisting Rock Discontinuities in Fracturing Fluid Leakoff and Flowback. Transp Porous Med 135, 137–180 (2020). https://doi.org/10.1007/s11242-020-01472-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11242-020-01472-3