
Abstract
The exponential rise in wireless communication demands and allied applications have revitalized academia-industries to develop an efficient and potential solution. Furthermore, the high-pace increasing scarcity of radio spectrum has also alarmed researchers to achieve better Quality of Service (QoS) centric solution. To meet such demands Visible Light Communication (VLC) systems have gained global attention; however, up surging high rate, range and reliability (3R) needs demand better performance. Towards these goals, Multiple Input Multiple Output (MIMO) based VLC systems is an efficient approach; though its efficacy under Multiple Users (MU) conditions remains least explored. Enabling MIMO-MU based VLC can achieve 3R objectives effectively; however, factors like multipath attenuation, interferences and varied impairment-affects makes classical approached confined. The MIMO-MU VLC systems require robust error, noise or interference resilient transmission even under adverse conditions such as non-linear LED, multipath attenuation and interference. Towards these objectives, in this paper a highly robust MIMO-MU VLC system is developed that incorporates an augmented MIMO channel design and combined pre-coding and post equalization schemes. To alleviate major interference probability in MIMO-MU environment, proposed model incorporates time (delay)-multiplexing based data transmission followed by signal adaptive precoding and Volterra Kernel based Hybrid-equalizer. This approach enables interference and noise removal as well as LED non-linearity handling under MIMO-MU VLC communication. The use of a Volterra Kernel based Decision Feedback Equalization with both linear as well as non-linear equalization enables proposed VLC system to exhibit low Bit Error Rate with low modulation index and taps, that optimizes trade-off between performance as well as complexity.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The exponential rise in wireless communication and allied application demands such as broadband transmission, mobile communications, and Internet enabled services have revitalized academia-industries to develop efficient communication systems. Considering the fact that a major fraction of wireless data traffic originates from indoor applications [1], service providers are now exploring certain innovative, reliable, and cost-efficient solution to facilitate Quality-of-Service (QoS)-centric indoor wireless coverage. Undeniably, there are ever-increasing demands across wireless communication system and under spectrum-scarce condition radio frequency (RF) based approaches seem to be confined. The limited spectral efficiency and saturation need low cost and reliable alternative to cope up with high-pace up surging demands. Towards an alternative solution, Visible Light Communication (VLC) system has been found more efficient over classical RF based communication. VLC systems can be the complementary solution to RF based communication or standalone indoor communication solution, which is further applauded because of its capability to alleviate at-hand radio spectrum scarcity [2,3,4]. VLC has broadened the horizon of communication systems by exploiting untapped electromagnetic spectrum in the visible light region to further assist (indoor) lighting as well as communication simultaneously [5,6,7]. Robustness, unlike classical RF based communication, it does not impose interference with electromagnetic radiation which makes it as a reliable solution especially at the places with high electromagnetic interference (EMI), such as hospitals, industrial applications etc. [8, 9]. VLC system contains Light Emitting Diodes (LEDs) as signal transmitter and photodiodes (PDs) as receiver. The high modulation bandwidth of the transmitters (i.e., LED) enables high rate modulation of the amplitude of the optical signal that often remains un-perceived by human eye. Human eye can perceive merely the average intensity when light intensity varies fast and, hence LEDs can transmit data without introducing any perceptible effect on the lighting output that makes it adaptive for human eyes. Furthermore, the use of LED as lighting device as well as simultaneous data transmission system makes it a potential and cost-effective solution for indoor communication. The low-cost, longer lifetime and energy-efficient features of LED as illumination device and communication system make it a viable potential solution to meet future communication demands. The aforesaid features enable VLC to become one of the most sought communication systems for fifth-generation (5G) wireless communication. Though, being a robust wireless communication system, VLC possesses certain limitations such as limited range and relatively lower rate of transmission than classical RF based system; however, its efficacy often remains the driving force across academia-industries to augment and achieve more efficient indoor communication.
Selection of visible light bandwidth, human-adaptive Light-Communication systems, 3R needs often remains an open research region of researchers. To achieve above stated needs (i.e., 3R demands), augmenting transmission mechanism, channel conditions, data retrieval etc. can be vital; however, very few efforts have been made to augment VLC channel model, signal optimization, interference-resilient transmission, data retrieval under non-linear condition etc. Addressing above stated issues can achieve 3R centric solution to become a potential 5G communication. The use of Multiple-Input-Multiple-Output (MIMO) schemes can make VLC more efficient, especially for reliability and high range transmission. On the other hand, the possibility of high interference in MU environment often challenges researchers to develop more efficient transmission system. Optimization becomes inevitable in case of noise (thermal as well as channel), multipath dispersion and LED non-linearity, etc. Considering this key research scope in this paper the focus is made on enhancing MIMO transmission followed by combined pre-coding and equalization.
Towards channel design and MIMO transmission a few efforts have been made; however majority of the existing systems rely on either recursive calculation methods [10,11,12] or Monte Carlo ray tracing mechanisms [13,14,15]. The angle of incidence and angle of irradiance along with propagation path and distance gets effected due to user mobility, which adversely affects the gain of the channel and its capacity [16].To address this issue and to assure QoS, Pollock et al. [16] proposed a indoor mobility model for VLC system with the aid of discrete time Markov chain theory. However, sampling scale is to be taken care of to obtain efficient capacity and to include adequate fraction of link. In order to achieve high mobility with reduced computational time and optimal positioning of LED in indoor environment Sharma et al. [17] proposed the approach of Hyper-heuristics evolutionary algorithm. In Miao et al. [18], interference probability in multipath scenario is reduced using modified MPPSK and soft decision detector however, non-linearity of LED is not taken into account. Noticeably, there are stark differences between Infrared (IR) and VLC communications and hence, the classical VLC channel models cannot be applied in its native form to achieve MIMO-MU VLC communication. Researchers [19,20,21,22,23] made sporadic efforts to deal with channel modeling. For instance in Chun et al. [19], Monte Carlo ray tracking mechanism was developed to assess Channel Impulse Response (CIR) of VLC in indoor environment. However, the consideration of the fixed reflectance values avoided the wavelength dependency issues. Recursive approaches [10, 20, 21] were also based on CIR estimation; however, with the fixed reflectance parameters. Recursive method based CIR estimation with wavelength dependent channel was made in [23]; the assumption of merely purely diffuse reflections and ideal Lambertian source could not be universally ideal under major realistic applications. In addition to the VLC channel modeling, enabling high rate transmission often remains a challenging task. Recent researches [24,25,26,27,28,29] have recommended that MIMO systems can have decisive role in achieving better spectral efficiency in indoor VLC systems. Practically, indoor VLC system often used to be equipped with multiple sources (i.e., LEDs) and hence optical-MIMO can be developed to assist high rate data and reliable transmission [29]. Undeniably, the inclusion of MIMO-MU environment imposes significantly high interference that could eventually degrades the VLC performance. It demands certain interference mitigation approach for which transmission computation schemes and precoding can be vital [30]. In the last few years Transmit Precoding (TP) schemes have gained attention for Inter Channel Interference (ICI) cancellation objectives in MIMO VLC [31,32,33,34,35]. Unlike classical methods [30,31,32,33] signal adaptive TP can be vital; though it is not yet explored. On contrary, major existing approached focus on eradicating interference completely by ignoring non-diagonal elements of the channel matrix considering it as noise. However, the use of constructive interference between spatial streams from multiple users could be exploited to enhance transmission efficacy and reliability.
1.1 Contribution
Considering the need for a robust MIMO-MU VLC system for 3R (transmission). Specifically, the contribution of the present paper is summarized below:
-
To develop a novel MIMO transmission scheme, followed by combined precoding and equalization scheme.
-
Unlike classical MIMO channels, here time (delay) multiplexing MIMO transmission is designed that avoids interference significantly by permitting one symbol array transmission at-once. It enables interference cancellation.
-
Furthermore, a signal adaptive precoding scheme is proposed using the methods of Marshoud et al. [36] that exploits constructive interference due to MU condition.
-
Undeniably, VLC systems undergo noise, multipath distortion, and LED non-linearity condition that often results into Inter-Symbol-Interference (ISI), Symbol Time Offset (STO), noise and interference etc. To alleviate such issues in this paper a Volterra series hybrid equalization model is developed that embodies both linear as well as non-linear filters.
-
Unlike conventional approaches, we have applied Decision Feedback Equalization (DFE) concept with Feed-Forward Filter (FFF) and Feed-Backward Filter (FBF) that cumulatively enables optimal filter-coefficient estimation and data retrieval at the receiver to ensure reliable communication over MIMO-MU VLC system.
The remaining sections are divided as follows: Sect. 2 presents the proposed system model, which is followed by simulation setup in Sect. 3. Section 3 presents the results obtained and its inference, while conclusion and future scopes are discussed in Sect. 4. References used are presented at the end of the paper.
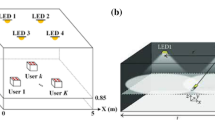
2 System model
As shown in Fig. 1, observing major literatures, allied limitations and possible scopes, the following inferences could be built.

MIMO-MU VLC issues and scopes
The overall proposed MIMO-MU VLC system comprises three key functions. These are:
-
1.
Time-multiplexing MIMO-MU transmission (TMMT)
-
2.
Signal adaptive pre-coding
-
3.
FFF-FBF assisted Volterra Kernel based hybrid equalization.
2.1 Time multiplexing MIMO-MU transmission (TMMT)
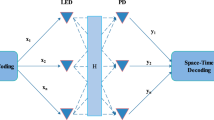
Undeniably, the inclusion of MIMO can enable high rate and reliable data transmission over indoor VLC systems [29, 37]; however, applications like the non-imaging MIMO requires specific focusing lens for PD that increases the cost as well as complexity. A non-imaging 4 × 4 MIMO VLC system was developed in Burton et al. [38] that could achieve maximum 50 Mbit/s data transmission over 2 m of range. To further enhance the transmission rate to 1 Gb/s, Azhar et al. [39] developed a 4 × 4 MIMO VLC system; however its range was merely 1 m. A 4 × 4 MIMO model was found achieving data rate of 920 Mbit/s; however it required specific μLEDs that somewhere violates human adaptive lighting condition. Almost for all these MIMO systems traditional channel model was applied that could not be effective in case of multiuser environment. Practically, the receivers receive not only the light signals but also the interference signal from other channels. Classically, the 4 × 4 MIMO based multi-channel communication system is defined as (1).
where \( \left[ {\begin{array}{*{20}l} {{\text{Y}}_{1} } \hfill & {{\text{Y}}_{2} } \hfill & {\begin{array}{*{20}c} {{\text{Y}}_{3} } & {{\text{Y}}_{4} } \\ \end{array} } \hfill \\ \end{array} } \right]^{\text{T}} \) and \( \left[ {\begin{array}{*{20}l} {{\text{X}}_{1} } \hfill & {{\text{X}}_{2} } \hfill & {\begin{array}{*{20}c} {{\text{X}}_{3} } & {{\text{X}}_{4} } \\ \end{array} } \hfill \\ \end{array} } \right]^{\text{T}} \) signify the received signal and the transmitted signal, respectively. The other vector \( \left[ {\begin{array}{*{20}c} {{\text{N}}_{1} } & {{\text{N}}_{2} } & {\begin{array}{*{20}l} {{\text{N}}_{3} } \hfill & {{\text{N}}_{4} } \hfill \\ \end{array} } \\ \end{array} } \right]^{\text{T}} \) states the noise components. The channel response matrix \( H \) for each path of the VLC transmission is presented in terms of H coefficients (1). In our proposed MIMO transmission model to obtain the channel coefficients, the time-multiplexing training sequence (TS) (2) has been augmented with the transmitted data.
In general, after Free-Space Optical (FSO) transmission, the zero components of the training sequence (2) become non-zero. In other words, the disturbances caused due to other channels or the interferences from other channels get augmented with the training sequence pertaining to the retrieved signal. The channel response can be obtained for each path using (3).
In above Eq. (3), \( {\text{Y}}_{\text{ij}} \) states the jth received (training) signal of the ith receiver or PD. Estimating the channel matrix H, the transmitted signal \( \left[ {\begin{array}{*{20}l} {{\text{X}}_{1} } \hfill & {{\text{X}}_{2} } \hfill & {\begin{array}{*{20}c} {{\text{X}}_{3} } & {{\text{X}}_{4} } \\ \end{array} } \hfill \\ \end{array} } \right]^{\text{T}} \) is retrieved using (4).
In this proposed method the MIMO training sequence has been incorporated on the basis of the time-multiplexing that enables easier channel matrix H estimation. To avoid excessive interference each training sequence of the VLC signal has four distinct durations, where only one carries the signal data or the original data. For illustration, in the first time duration at the transmitter side, only LED-1 transmits \( T_{{S_{1} }} \) signal while at that duration the signal transmitted by LED-2, LED-3 and LED-4 remains zero. It assures that at that time duration the output at the receiver \( Y_{11} \) would be the correct data, while other components (i.e. \( Y_{21} \), \( Y_{31} \) and \( Y_{41} \)) would represent the interference caused due to LED-1 to the receivers (i.e., PD2, PD3 and PD4). Such events seem realistic in practice. In this manner, the retrieved channel response from the transmitter (i.e., LED-1) to each receiver (i.e., PDs) can be solved using (3). Similarly, the values of the remaining columns of H can also be estimated. Once estimating the channel matrix it has been further feed as input to the combined precoding and equalization processes to ensure optimal data retrieval at the VLC receivers.
2.2 Signal adaptive pre-coding
In MIMO VLC, particularly for MU environment there can be interference caused due to mobility and inter-beam collision like events [24, 29]. Considering a specific application scenario where the indoor spaces are equipped by multiple sources (i.e., LEDs), varied optical-MIMO schemes are proposed to assist high data rate transmission over VLC channels [29]; the interference caused due to beam-cross or Multiuser (MU) beam-interference (it can primarily happen due to unplanned transmitter–receiver placement and varying topology) cannot be ignored. In such cases developing interference-resilient transmission model can be of utmost significance. To achieve it TP algorithm can be significant that applies interference cancellation feature to perform ICI-removal [30,31,32]. Most of the existing pre-coding schemes focus on modulation optimization along with complete-interference component removal. However, there is a possibility of data loss in such cases. To alleviate such possibility in this paper we propose exploiting constructive interference component in between the spatial streams to retrieve more accurate outcomes as in [36]. In major cases the channel coefficient of the VLC system remains constant until there is any significant change in the user position or topology. Assuming that there is very slow movement in the indoor environment, we propose a TP scheme that performs “Pre-coding once per symbol” to obtain more accurate data output. We followed the methods of Marshoud et al. [36]. Here, the optical channels are real and positive that enables received interference estimation for the original transmitted symbols. Considering the fact that after inter-beam interference the colluded (interference) region can have significant knowledge, retrieval of the signal (i.e., original) data could assist better performance. Though, in previous phase the inclusion of TMMT could reduce interference probability; however the topology-changed case may cause ICI. In such cases the high correlation between the optical sub-channels can be vital, especially when the symbols transmitted are similar or equal [33]. A novel user terminal model to improve the performance of the pre-coded MU-MIMO indoor VLC system by utilizing multidirectional optical receiver with different FOV has been discussed in [40]. However BER performances of user terminals, for both users could achieve a BER of lower than 10−6. A Multi-User-Single-Stream (MUSS) VLC system has been introduced in [41]. Under the MUSS strategy, two schemes for indoor VLC systems were proposed. D-MUSS scheme has an advantage on system capacity and the S-MUSS scheme has lowest complexity. With this motivation in this paper a novel precoding scheme is proposed that could alleviate the affect of outdated CSI caused due to movement near LED [42].The proposed precoding model recommends exploiting the constructive interference by using symbol adaptive coding. A snippet of the proposed signal adaptive precoding scheme is given as follows:
Let the VLC system has \( {\text{N}}_{\text{T}} \) transmitters (i.e., LEDs) and \( {\text{N}}_{\text{R}} \) receivers [i.e., Photodiode (PD)] where \( {\text{N}}_{\text{T}} = {\text{N}}_{\text{R}} = {\text{N}} \) and let there N nodes be transmitting \( {\text{N}}_{\text{T}} \) distinct data streams simultaneously. Let \( {\text{N}}_{\text{R}} \) PD be corresponding to one of Mus, then the total received signal can be obtained by (5).
In Eq. (5),\( {\text{x}} \in {\mathbb{R}}^{{{\text{N}} \times 1}} \) and \( {\text{y}} \in {\mathbb{R}}^{{{\text{N}} \times 1}} \) depict the transmitted and received signal vectors, respectively. DC component be the DC bias used to maintain transmission signal as positive and n be the noise vector \( ({\text{n}} \in {\mathbb{R}}^{{{\text{N}} \times 1}} ) \). The MIMO channel matrix can be defined as \( {\text{H}} \in {\mathbb{R}}^{{{\text{N}} \times {\text{N}}}} \) (6).
In (6), \( {\text{H}}_{\text{ijD}} \) and \( {\text{H}}_{\text{ijl}} \) signify the expected and interference channel paths, respectively. The received signal at the ith PD can be obtained by (7).
where, \( \gamma \) states responsiveness of the PD, P signifies the transmission power of the LED, \( H_{i}^{T} \) states the ith row in \( \varvec{H} \), while \( \varvec{x} \) states for the original data being transmitted. The other variable \( {\text{n}}_{\text{i}} \) signifies the receiver noise with statistically autonomous and equally distributed probabilities obtained from a circularly-symmetric Gaussian distribution with zero mean and variance. Mathematically,
where \( \sigma_{shi}^{2} \) and \( \sigma_{thi}^{2} \) present the shot noise and the thermal noise variance, subsequently. Mathematically, \( \sigma_{sh}^{2} \) of the ith photo detector can be obtained using (9).
In (9), q signifies the electronic charge, \( {\text{B}} \) refers spectrum, \( I_{bg} \) presents the background current and while \( I_{2} \) states a factors called noise bandwidth [12]. Typically, the thermal noise originates merely around the trans-impedance receiver circuitry for which \( \sigma_{sh}^{2} \) can be obtained by (10).
In (10), k refers the Boltzmann’s constant, the absolute temperature is denoted by \( T_{k} \), G signifies the open-loop voltage gain, while the area of PD is \( {\text{A}}_{\text{i}} \). The variable \( \upeta \) signifies the fixed capacitance of the PD (per unit area), \( g_{m} \) refers the transconductance of the field effect transistor. The parameter \( {\text{I}}_{3} \) refers a weight function that primarily relies on the input optical pulse shape [43]. Thus, applying above variables the signal-to-interference-plus-noise ratio (SINR) at the ith PD can be estimated using (11).
In case of the constructive interference between Mus, it is not mandatory to null all off-diagonal components of the H matrix. In such case, only eliminating destructive interference can enable sufficient diversity gain to assist receivers for averting from the noise enhancement effect. In this paper this behaviour is stated as (Optical) Signal Adaptive Pre-coding. The constructive interference states the ICI that augments to the energy of the symbol of interest (SoI), thus generating significant increase in its distance from the constellation thresholds. On the other hand, in case of PAM modulation where H is often positive, it affirms that ICI is constructive when the instantaneous symbols are same. Thus, applying the knowledge about the transmitted data, it becomes feasible to estimate the interference symbol by symbol giving a constructive adaptive matrix T, which could further enable estimating a new adaptive pre-coding matrix \( {\text{W}}_{\text{d}} = {\text{W}}.{\text{T}} \), that comprises a fixed user specific pre-coding matrix W calculated on the basis of the channel gains of the individual users. The symbol-level adaptive pre-coding matrix T relies primarily on the symbols to be transmitted to the user. Thus, it can eliminate or cancel the interference signals carrying varied transmitted bits pertaining to the receiver, while carrying the signals possessing the same information bit. Generally, the received signal at each photo detector refers the addition of its expected signal and signals with constructive ICI. Finally, the received signal at ith PD after scraping the DC bias can be depicted as,
In (12), \( {\text{wd}}_{\text{j}} \) is the \( {\text{j}}^{\text{th}} \) column vector in the adaptive pre-coding matrix \( {\text{Wd}} \) and the other variable \( {\text{G(i) }} \) states set of LEDs from where \( {\text{PD}}_{\text{i}} \) retrieves the expected data as well as the constructive ICI, which used to be completely useless in classical CI. The instantaneous SNR can be obtained using (13), which can further be used for performance assessment.
2.3 FFF-FBF assisted Volterra Kernel based hybrid post-equalization
The multipath dispersion and allied phenomenon in conjunction with LED non-linearity often results into linear and/or nonlinear disturbances that adversely affect VLC performance. Equalizer can be vital to address the issue of LED’s bandwidth limitation as well as ISI problem in the MIMO MU VLC link [44, 45]. To alleviate interference, techniques like linear equalizers such as decision feedback equalization (DFE), training symbol [46], and recursive least square (RLS) [47] have been studied. Approaches like Decision-Directed Least Mean Square (DD-LMS) [48], post-distortion schemes [49], hybrid time–frequency domain equalization (TFDE) [50] and Volterra series based nonlinear equalizer [51] have been recommended for VLC systems [47]. However, majority of the existing approaches either apply linear equalizer or classical non-linear equalizers [48] that functionally impose significantly high computational overheads. On contrary, retaining an optimal trade-off between the performance and computational overhead is must for the communication systems like VLC. Furthermore, merely linear or non-linear equalizers alone can’t achieve optimal performance to accomplish 3R objectives. Considering these facts, in this paper we develop a robust Volterra Kernel based DFE-hybrid equalizer model that comprises both linear as well as non-linear filters of FFF and FBS types to enable swift and optimal data retrieval at the receiver. In this paper we have applied both FFF and FBF filters that in conjunction with a decision device (DD) enables swift and accurate data retrieval at the receiver side. A snippet of the applied Hybrid Post-equalizer is given as follows.
2.3.1 Volterra Kernel concepts
The Volterra model can be stated as the generalized form of linear time invariant (LTI) systems to the non-linear form signifying that each Non-Linear Time-Invariant (NLTI) system can be characterized in terms of the infinite sum of (multidimensional) convolutional integrals of increasing order. Mathematically, (14)
In the above expression \( h_{n} \) and \( h_{0} \) state for the nth order Volterra Kernel and the linear component of the system, respectively. Typically, the Volterra Kernel of higher order refers the system’s non-linear behaviour. It signifies two inferences, first that the pre-availed information about Volterra Kernel can be enough to estimate its response to any random input signal, and second a system with infinite sum of convolutional integrals makes estimation highly complicate and sometimes impossible, as it requires truncating into a finite sum [52]. Practically, the second inference holds correct for optical fiber communication. To depict the presence of an infinite number of Volterra Kernels, the closed-form solution of the Non-Linear Schrödinger Equation (NLSE) can be obtained for a nonlinear fiber of length L while ignoring dispersion affect [53]:
In (15)\( \alpha \), \( \beta \) and \( L_{Eff} \) states the attenuation coefficient, nonlinear coefficient and the effective length of the fiber, respectively. Equation (15) can be further expanded using Taylor series to achieve the infinite sum (16):
Observing (16), it can be found that the output signal \( A\left( {L,t} \right) \) comprises a linear component of the input signal \( A\left( {0,t} \right) \) and an infinite sum of higher order odd powers of the input. Considering the effect of dispersion fiber still remains a nonlinear system comprising an infinite sum of nonlinear components. In the proposed work, Volterra nonlinear equalizer (VNLE) has been designed of a finite-order. To perform Voltera Kernel based equalization requires estimating coefficient which can be obtained either by Wiener filtering [54] and/or DFE. It can be solved by estimating the Minimum Mean-Squared Error (MMSE), or Least Mean Square (LMS) criterion. In this paper, DFE based non-linear equalization where both FFF as well as FBF filters is applied to perform linear as well as non-linear equalization has been incorporated. The use of multiple filter design makes proposed system to be called as Hybrid equalizer. There is the linear relation between the output and the equalizer coefficients that enables estimation of the output similar to that of a linear Wiener filter. Practically, applying certain linear model for obtaining nonlinear system might make Wiener filter suboptimal and hence selection of a suitable nonlinear model of the system is must [54]. Now, applying the above equations and restricting it to the 3rd order nonlinearities, the equalizer can be defined by (17).
where \( y\left( n \right) \) and \( x_{k} \) signify the output and input of the equalizer at time instant k, \( e_{k} \) and \( e_{lmn} \) state the coefficient of the equalizers also called weight parameters, which is the discrete representation of the first and third Volterra Kernels of the equalizer, respectively. The parameter \( Ne \) states the number of linear equalizer coefficients. Here, \( x_{k - l} .x_{k - m} .x^{\prime}_{k - n} \) can be obtained from \( \left| {A\left( {0,t} \right)} \right|^{2} .A\left( {0,t} \right) = A\left( {0,t} \right).A^{\prime}\left( {0,t} \right) \) as depicted in (16). Considering our targeted MIMO MU VLC system which is highly dispersive in nature, in the absence of in-line dispersion compensation there can be high Inter-Symbol-Interference (ISI). It can make \( Ne \) higher and hence overall complexity might increase significantly. To provide a potential solution in this paper a Voltera kernel based DFE model containing FFF and FBF filters has been designed. The proposed Hybrid equalizer model performs both linear as well as non-linear equalization in sequence to enable optimal interference (i.e., ISI) and noise compensation.
2.3.2 Volterra-kernel based hybrid equalization for MIMO-MU VLC system
As shown in Fig. 2 schematic of the feed forward equalization [52], our proposed equalization model outputs the sum of a set of input signals which are suitably delayed and weighted by the tap coefficients. Mathematically,

Schematic of the feed-forward equalization [52]
In (18), \( y(t) \) is the output of the equalizer, while \( s(t) \) is the input signal. In addition, N refers the number of taps, \( C_{n} \) signifies the tap-coefficient and T refers the tap delay. A simple depiction of this model is given in Fig. 2. Though, a few efforts have been made to exploit feed-forward equalizer [55, 56] with a transversal filter design; however their efficacy for high speed communication and under LED non-linearity along with certain linear noises is not assessed.
High-speed transversal filters with adjustable tap coefficients have already been found effective [55] and is well suited for our targeted MIMO-MU VLC systems with moderate symbol rates. Unlike classical feed-forward filter (FFF) based approaches [55, 56], we have applied both Feed Forward Filter (FFF) as well as Feed-Backward Filter (FBF) that in conjunction with a Decision Device (DD) exhibits distortion mitigation and error removal from the received signals at PDs. A snippet of our proposed Hybrid-Equalization model is given as follows:
For communication systems with additive noise in conjunction with pre/post -cursor interference, DFE can enable a better trade-off in between performance and the complexity. In some other existing works, linear decision feedback schemes have also been employed for optical wireless communication [57]. The simple structure and ease of implementation makes DFE a better alternative for VLC system. However, in comparison to the single feed forward equalizer and a non-linear DFE model can have better performance. Observing Eq. (17), it is well understood that the suitable selection of the filter coefficients for both linear as well as non-linear filters can enable optimal performance. Approaches like DFE which applies both FFF as well as FBF can enable swift and more accurate weight (i.e., filter coefficient) estimation that in conjunction with DD model might achieve optimal performance. In some cases analytical approaches are applied to estimate coefficients; however lack of precise noise component requires tuning over certain training data. The non-linearity being of 3rd order also gets compensated by proposed equalization scheme. As noise imposes complexity during filter coefficient estimation (i.e., tuning), we have applied only the largest of the 3rd order non-linear terms. This is because the smaller 3rd order of all higher order terms can possess higher inaccuracy that eventually could impact equalization. As already stated the proposed hybrid equalization model encompasses both FFF as well as FBF that in conjunction with a DD model exhibits coefficient estimation for impairment’s removal. The proposed DD model can be defined using (19).
where the output of FFF is derived as
Here, FFF holds the past, current and future (received) symbol, while FBF contains the vector of past decisions. Noticeably, the linear coefficients for the FFF are \( e_{kFFF} \) and \( e_{lmnFFF} \). Similarly, the coefficient for FBF are \( e_{kFBF} \) and \( e_{lmnFBF} \). Here, the length of the linear component of FFF and FBF are \( n1 \) and \( n2 \), respectively. Now to estimate optimal output from the equalizer the stated filter-coefficients are tuned over a training period. For this process, the data received at the PD is fed as input of the linear equalizer whose output is later fed as input to the non-linear equalizer. The known received sequence \( y(n) \) is transmitted to the FFF filter which is then feedback to the FBF and thus forms a closed loop computation. Thus the error signal signifying the error between the training signal and the decision output is minimized by selecting suitable filter coefficients in above filter equations. Typically, Recursive least squares (RLS) and LMS algorithms are applied in adaptive filtering; however RLS imposes significant computational cost and complexity [58]. LMS algorithm is well suited as adaptive filtering that enabled optimal tap weight’s assignment for the nonlinear equalizers [59, 60]. Multiple iterations have been applied for every symbol that eventually increases the rate of convergence. Finally the tuning process is stopped after certain defined iterations. The overall FFF and FBF coefficient tuning is depicted in the following Algorithm 1.

In the above algorithm, \( N_{Training } \) signifies the size of the training dataset, while the error signal after ith iteration is given by \( error^{(i)}_{q} \). The parameter \( \mu \) signifies the convergence parameter. In the proposed model the coefficients are tuned for each input data symbols and once completing training over defined iterations, it is assumed that the coefficients are optimally tuned and thus the tuned parameters are assigned to the filters to retrieve originally transmitted data (22).
The results obtained and its inferences are discussed in the sub-sequent section.
3 Results and discussion
As discussed in previous sections, the current study primarily focuses on developing a robust VLC communication system that could achieve high Rate, Range and Reliability (3R) demands. Predominantly, the focus is made on developing a robust MIMO-MU based VLC system. Towards these objectives the focus was made on augmenting major functional components of the classical VLC systems including MIMO MU transmission avoiding major interference probability, pre-coding and equalization. Considering major real-time application environment, MIMO-MU was considered that often undergoes adverse interference and signal dispersion conditions. In addition, LED non-linearity also imposes significantly high ISI or similar error-proneness that demands robust equalization. On the other hand, the classical VLC channel models does not consider wavelength dependency and different dimensional aspects of the indoor environment to perform high rate transmission. In such cases developing a robust interference avoidance model for MIMO MU environment, enhanced equalization under non-linear transmission condition can be of utmost significance. The inclusion of these aforesaid novelties could make MIMO-MU VLC system robust and efficient to enable 3R objectives, especially for LTE-A systems or 5G networks. With these motivations, in this research paper a highly robust MIMO-MU assisted VLC system was developed which was augmented with a robust time-multiplexing based MIMO transmission, constructive interference knowledge retrieval and post equalization. To achieve high data rate and reliability MIMO based multiuser environment was designed with \( 4 \times 4 \) configurations. To enable a low cost solution, White LED of 340 nm wavelength was considered which is suitable for human eye and can enable indoor illumination as well as communication. Some of the key parameters used and their respective values are given in Table 1.
The transmission distance is fixed at 1.5 ms. It has been observed that applying higher modulation order can achieve more reliable performance by maintaining low BER (lower than the FEC threshold \( 3 \times 10^{ - 3} \)). The current study can accomplish the cumulative data rate up to 8 Gb/s for 1.5 m distance. Being a MIMO MU VLC system, in the simulation model at the transmission terminal, an M-ary data symbol is transformed into equivalent optical signal after performing PAM modulation. Once performing 4-PAM modulation the optical signal obtained is transmitted through a finite number of spans that often get affected by linear as well as nonlinear affects including amplifier noise that eventually reaches to the receiver. The designed receiver down-converts the optical signal into corresponding electrical signal pulses. Receiver contains an optical filter to limit the amplified spontaneous emission (ASE) noise, a photo-detection device, and an electrical filter to reduce (electrical) noise. Similar to the transmitter, receiver does have a pulse shape matching filter. Noticeably, the narrow bandpass characteristics of the filter enable removing nonlinearity from the PD output. Performing sampling once per symbol period at certain optimal discrete time, the output is generated which is further feed as input to the equalizer that contains linear and non-linear filters in sequence. Unlike classical approaches, here a hybrid equalizer is applied. In this study the input signal Vpp was assigned at 0.4 V and the bias voltage is fixed at 3.25 V. As already stated in this research a hybrid equalizer that can also be called as hybrid post equalizer has been developed for which DFE concept [18, 61] has been applied to retrieve originally transmitted data. Considering overall process it can be visualized that the efficacy of equalization does have vital impact on the overall performance. To augment performance unlike classical Feed Forwards (Filter) Equalization (FFE), here both FFF as well as FBF that as cumulative solution enables better learning over the training period or samples in retrieving optimal coefficients have been incorporated. Undeniably, the effect of optimal coefficient selection and error removal on BER performance are to be taken care. To achieve better performance, we have intended to maintain low tap number that could balance optimal trade-off between performance and computational cost. In addition it can enable simple electronic circuit design. The Avalanche Photodiodes (APD) was applied to support PIN based receiver in VLC link to achieve better performance. Literatures have already reported efficacy of APD to achieve power-efficiency and higher data rate over VLC link [62, 63]. The considered configuration was suitable to exhibit significant responsivity in the visible wavelength range (0.28 A/W) as well as sufficient bandwidth (650 MHz) to enable gigabit data transmission. Noticeably, the current study employed line-of-sight (LOS) free-space link as transmission channel with optical lenses. The developed LOS link model signified directly-illuminated configuration of indoor application environment with \( 5 \times 5 \times 3 \) dimension while its beam characteristics (coverage, field of view) were adjusted appropriately to retain optimal LOS links. To assess efficacy of the proposed Hybrid-equalizer based MIMO-MU VLC system, comparison of linear equalizer, non-linear equalizer, classical feed forward based DFE equalizer and proposed Volterra Kernel based Hybrid-equalizer have been performed. The performance has been assessed in terms of coefficient learning rate and error estimation by different filters and their respective BER performance over developed MIMO-MU VLC system.
Results (Figs. 3, 4, 5, 6) depict the performance by the different approaches. In order to evaluate the test fall of the proposed model the tuning parameters are given as follows. Mean square error (MSE) performance has been obtained over defined training period or iterations of 15,000 with a step size of 0.05. As already stated in our proposed model to achieve better performance, filter coefficients were estimated for overall defined iterations (15,000 iterations) to obtain suitable filter coefficients for optimal (i.e., original) data recovery at the receiver. Observing Figs. 3, 4, 5 and 6, it can be found that the MSE performance at lower modulation index is better than the higher one. Here, all four equalization models have exhibited better performance at the modulation index of 0.05. Now, considering modulation index of 0.05 and further assessing performance, it can be easily visualized that the MSE performance by linear equalizer, Voltera series equalizer, DFE equalizer and the proposed hybrid equalizer (over training period) is near − 6 dB, − 15 dB, − 8.1 dB and approximately − 17 dB, respectively. Considering overall MSE performance, it can be easily visualized that Volterra Kernel based equalization can perform better and more specifically DFE (containing both FFE as well as FBF learning) exhibits better than other state of art approaches. Here, reducing MSE signifies reachability towards optimal (original) data recovery. In addition, as already stated that maintaining minimum modulation index can augment trade-off between performance and complexity, therefore it can be hypothesis that the MIMO MU VLC system with lower modulation index based N-PAM can achieve a better solution. With this motive, in this paper we have examined MSE performance by all equalization models comprising linear equalizer, Volterra equalizer with Feed-forward filtering, DFE equalizer (feed-forward equalization) and our proposed Hybrid Equalization model.

Linear Equalization based coefficient estimation over training period

Volterra Equalization based coefficient estimation over training period

DFE Equalization based coefficient estimation over training period

Proposed Hybrid Equalization (FFF + FBF DFE Volterra) based coefficient estimation over training period
Observing Figs. 4 and 6 which signifies the MSE performance by Volterra equalizer and the proposed Hybrid or DFE (FFF + FBF filters) assisted Volterra equalizers, respectively, it can be stated that though Volterra based equalizers can have vital significance to alleviate noise and interference/impairment), however, the proposed Hybrid Equalizer do have more potential as compared to other approaches. Considering the above results, it can be found that the selection of the modulation index 0.05 can be better to achieve optimal performance. With this intend for further performance assessment, modulation index 0.05 has been assigned for which the Bit Error Rate (BER) performance was obtained over varying Signal to Noise Ratio. Figure 7 presents the BER performance over varying SNR.

BER Performance over varying SNR values
The above result (Fig. 7) depicts that the proposed Volterra Kernel based Hybrid equalizer which is augmented with both FBF as well as FFF filters in conjunction with the decision device outperforms other filters. As it can easily be observed that the equalization with linear filter which does not use any sophisticated measure to deal with LED non-linearity undergoes adversaries and hence performs least efficient. On contrary, the classical Volterra series-based equalization with only Feed-forward equalization though performs better than linear equalizer; however, exhibits less efficient as compared to our proposed or even DFF (Decision Feed Forward equaliser). The proposed Hybrid equalizer model, which exploits efficacy of both FFF as well as FBF filters and Volterra Kernel-based DFE concepts for coefficient learning and impairment removal exhibits better. The BER result reveals that the proposed equaliser model in conjunction with the augmented Time-Multiplexing MIMO-MU Transmission (TMMT), Signal Adaptive Pre-coding and FFF-FBF assisted Volterra Kernel based Hybrid Equalization remains under the acceptable BER \( 2 \times 10^{ - 3} \) and thus is applicable for VLC communication.
4 Conclusion
The exponential rise in wireless communication and allied QoS centric application demands has alarmed research society to achieve more resource and cost efficient solutions. On contrary, the up surging scarcity of radio spectrum has forced academia-industry to explore alternative for which Visible Light Communication (VLC) has emerged as a potential solution. VLC systems can perform both illumination as well as communication simultaneously, that makes it a well sought communication paradigm for next generation. On the other hand, its significance becomes more noticeable when to serve major indoor communications which imposes a major load on classical RF based transmission system. Thus, considering such robustness VLC communication system has gained global attention across academia-industries to exploit its efficacy for indoor communication purposes. However, the classical VLC systems are confined due to low range and high vulnerability due to dispersion and/or interferences. As alternate technology, MIMO based multiuser applications have gained better momentum to meet high data rate transmission over VLC; however, signal interference, multipath dispersion, LED non-linearity, etc. imposes major challenges to meet QoS over VLC. To deal with such adversaries in this research paper a multi-phase optimization effort was made by developing a robust MIMO MU VLC model using augmented concepts of Time-Multiplexing MIMO-MU Transmission (TMMT), Signal Adaptive Pre-coding and FFF-FBF assisted Volterra Kernel based Hybrid Equalization. In this paper at first a \( 4 \times 4 \) MIMO MU VLC transmission system was developed using TMMT concept that intended to reduce initial interferences due to simultaneous data transmission. The inclusion of the proposed combined precoding and hybrid equalization model designed with DFE assisted Volterra Kernel based Hybrid equalizer which is augmented with both FBF as well as FFF filters in conjunction with the decision device outperforms other equalization schemes such as linear equalization, classical Volterra series equalization, and DFF equalization. The BER performance also revealed efficacy of the proposed MIMO MU VLC model which affirms its suitability towards 3R objectives.
References
Cisco, San Jose, CA, USA. (2012). Cisco service provider Wi-Fi: A platform for business innovation and revenue generation. Available http://www.cisco.com/en/US/solutions/collateral/ns341/ns524/ns673/solution-overview-c22-642482.html/. Accessed January 16, 2016.
Kashani, M. A., Safari, M., & Uysal, M. (2013). Optimal relay placement and diversity analysis of relay-assisted free-space optical communication systems. IEEE/OSA Journal of Optical Communications and Networking, 5(1), 37–47.
Karimi, M., & Uysal, M. (2012). Novel adaptive transmission algorithms for free-space optical links. IEEE Transactions on Communications, 60(12), 3808–3815.
Kashani, M. A., Rad, M. M., Safari, M., & Uysal, M. (2012). All-optical amplify and-forward relaying system for atmospheric channels. IEEE Communications Letters, 16(10), 1684–1687.
Burchardt, H., Serafimovski, N., Tsonev, D., Videv, S., & Haas, H. (2014). VLC: Beyond point-to-point communication. IEEE Communications Magazine, 52(7), 98–105.
Shao, S., Khreishah, A., & Khalil, I. (2016). Joint link scheduling and brightness control for greening VLC-based indoor access networks. IEEE/OSA Journal of Optical Communications and Networking, 8(3), 148–161.
Armstrong, J. (2013). Optical domain digital-to-analog converter for visible light communications using led arrays [invited]. Photonics Research, 1(2), 92–95.
Jovicic, A., Li, J., & Richardson, T. (2013). Visible light communication: Opportunities, challenges and the path to market. IEEE Communications Magazine, 51(12), 26–32.
Pathak, P. H., Feng, X., Hu, P., & Mohapatra, P. (2015). Visible light communication, networking, and sensing: A survey, potential and challenges. IEEE Communications Surveys & Tutorials, 17(4), 2047–2077.
Barry, J. R., Kahn, J. M., Krause, W. J., Lee, E. A., & Messerschmitt, D. G. (1993). Simulation of multipath impulse response for wireless optical channels. IEEE Journal on Selected Areas in Communications, 11(3), 367–379.
Lopez-Hermandez, F. J., & Betancor, M. J. (1997). DUSTIN: Algorithm for calculation of impulse response on IR wireless indoor channels. Electronics Letters, 33(21), 1804–1806.
Carruthers, J. B., & Kannan, P. (2002). Iterative site-based modeling for wireless infrared channels. IEEE Transactions on Antennas and Propagation, 50(5), 759–765.
Lopez-Hernandez, F. J., Perez-Jimeniz, R., & Santamaria, A. (1998). Monte Carlo calculation of impulse response on diffuse IR wireless indoor channels. Electronics Letters, 34(12), 1260–1262.
Lopez-Hernandez, F. J., Perez-Jimenez, R., & Santamaria, A. (1998). Modified Monte Carlo scheme for high efficiency simulation of the impulse response on diffuse IR wireless indoor channels. Electronics Letters, 34(19), 1819–1820.
Lopez-Hernandez, F. J., Perez-Jimenez, R., & Santamaria, A. (2000). Ray tracing algorithms for fast calculation of the channel impulse response on diffuse IR wireless indoor channels. Optical Engineering, 39(10), 2775–2780.
Pollock, T. S., Abhayapala, T. D., & Kennedy, R. A. (2003). Introducing space into MIMO capacity calculations. Telecommunication Systems, 24(2–4), 415–436.
Sharma, R., Kumari, A. C., Aggarwal, M., & Ahuja, S. (2018). Optimal LED deployment for mobile indoor visible light communication system: Performance analysis. AEU-International Journal of Electronics and Communications, 83, 427–432.
Miao, P., Wu, L., & Chen, Z. (2018). An anti-noise modem for visible light communication systems using the improved M-ary position phase shift keying. AEU-International Journal of Electronics and Communications, 85, 126–133.
Chun, H., Chiang, C., & O’Brien, D. (2012). Visible light communication using OLEDs: Illumination and channel modeling. In Proceedings of the international workshop on optical wireless communications (pp. 1–3).
Nguyen H. Q., et al. (2010). A MATLAB-based simulation program for indoor visible light communication system. In Proceedings of CSNDSP (pp. 537–540).
Komine, T., & Nakagawa, M. (2004). Performance evaluation on visible-light wireless communication system using white LED lightings. In Proceedings. 9th IEEE symposium on computers and communications (Vol. 1, pp. 258–263).
Long, S., Khalighi, M. A., Wolf, M., Bourennane, S., & Ghassemlooy, Z. (2014). Channel characterization for indoor visible light communications. In Proceedings of IWOW (pp. 75–79).
Lee, K., Park, H., & Barry, J. R. (2011). Indoor channel characteristics for visible light communications. IEEE Communications Letters, 15(2), 217–219.
Safari, M. (2016). MIMO free-space optical communication (pp. 231–253). Cham: Springer.
Navidpour, S. M., Uysal, M., & Kavehrad, M. (2007). BER performance of free-space optical transmission with spatial diversity. IEEE Transactions on Wireless Communications, 6(8), 2813–2819.
Popoola, W. O., Poves, E., & Haas, H. (2012). Spatial pulse position modulation for optical communications. Journal of Lightwave Technology, 30(18), 2948–2954.
Zhu, Y.-J., Liang, W.-F., Zhang, J.-K., & Zhang, Y.-Y. (2015). Space-collaborative constellation designsfor MIMO indoor visible light communications. IEEE Photonics Technology Letters, 27(15), 1667–1670.
Nuwanpriya, A., Ho, S.-W., & Chen, C. S. (2015). Indoor MIMO visible light communications: Novel angle diversity receivers for mobile users. IEEE Journal on Selected Areas in Communications, 33(9), 1780–1792.
Fath, T., & Haas, H. (2013). Performance comparison of MIMO techniques for optical wireless communications in indoor environments. IEEE Transactions on Communications, 61(2), 733–742.
Marshoud, H., Dawoud, D., Kapinas, V. M., Karagiannidis, G. K., Muhaidat, S., & Sharif, B. (2015). MU-MIMO precoding for VLC with imperfect CSI. In Proceedings of the IEEE 4th international workshop on optical wireless communications (IWOW) (pp. 93–97).
Hong, Y., Chen, J., Wang, Z., & Yu, C. (2013). Performance of a precoding MIMO system for decentralized multiuser indoor visible light communications. IEEE Photonics Journal, 5(4), 7800211.
Chen, J., Ma, N., Hong, Y., & Yu, C. (2014). On the performance of MU-MIMO indoor visible light communication system based on THP algorithm. In Proceedings of the IEEE international conference on communications in China (ICCC) (pp. 136–140).
IEEE standard for local and metropolitan area networks-part 15.7: Short-range wireless optical communication using visible light. IEEE Standard 802.15.7-2011, 2011 (pp. 1–309).
Masouros, C., & Alsusa, E. (2009). Dynamic linear precoding for the exploitation of known interference in MIMO broadcast systems. IEEE Transactions on Wireless Communications, 8(3), 1396–1404.
Masouros, C. (2011). Correlation rotation linear precoding for MIMO broadcast communications. IEEE Transactions on Signal Processing, 59(1), 252–262.
Marshoud, H., Sofotasios, P. C., Muhaidat, S., Sharif, B. S., & Karagiannidis, G. K. (2018). Optical adaptive precoding for visible light communications. IEEE Access, 6, 22121–22130.
Hsu, C. W., Chow, C. W., Lu, Y. I., Liu, Y. L., & Yeh, C. H. (2016) Demonstration of high speed imaging 3 × 3 MIMO-OFDM visible light communication system. In Proceedings of the IEEE photonics conference, USA, 2016, paper WP27.
Burton, A., Le Hoa, M., Ghassemlooy, Z., Bentley, E., & Botella, C. (2014). Experimental demonstration of 50-Mb/s visible light communications using 4 by 4 MIMO. IEEE Photonics Technology Letters, 26(9), 945–948.
Azhar, A. H., Tran, T. A., & O’Brien, D. (2013). A gigabit/s indoor wireless transmission using MIMO-OFDM visible-light communications. IEEE Photonics Technology Letters, 25(2), 171–174.
Hong, Y., Chen, J., & Yu, C. (2014). Performance improvement of the pre-coded multi-user MIMO indoor visible light communication system. In 2014 9th international symposium on communication systems, networks & digital sign (CSNDSP), Manchester (pp. 314–318).
Zhong, Q., Fan, Y., & Liu, S. (2018). Performance comparison of MU-MIMO schemes for indoor visible light communication systems. Optics Communications, 420, 110–115.
Ma, H., Lampe, L., & Hranilovic, S. (2015). Coordinated broadcasting for multiuser indoor visible light communication systems. IEEE Transactions on Communications, 63(9), 3313–3324.
Komine, T., & Nakagawa, M. (2004). Fundamental analysis for visible-light communication system using LED lights. IEEE Transactions on Consumer Electronics, 50(1), 100–107.
Kasper, B. L. (1982). Equalization of multimode optical fiber systems. Bell System Technical Journal, 61(7), 1367–1388.
Rappaport, T. S. (2002). Wireless communications: Principles and practice (2nd ed.). Englewood Cliffs: Prentice Hall PTR.
Cossu, G., Khalid, A. M., Choudhury, P., Corsini, R., & Ciaramella, E. (2012). 3.4 Gbit/s visible optical wireless transmission based on RGB LED. Optics Express, 20(26), B501–B506.
Wang, Y., Huang, X., Tao, L., Shi, J., & Chi, N. (2015). 4.5-Gb/s RGB-LED based WDM visible light communication system employing CAP modulation and RLS based adaptive equalization. Optics Express, 23(10), 13627–13633.
Wang, Y., Huang, X., Zhang, J., Wang, Y., & Chi, N. (2014). Enhanced performance of visible light communication employing 512QAM N-SC-FDE and DD-LMS. Optics Express, 22(13), 15328–15334.
Qian, H., Yao, S., Cai, S., & Zhou, T. (2014). Adaptive post distortion for nonlinear LEDs in visible light communications. IEEE Photonics Journal, 6(4), 1–8.
Li, J., Huang, Z., Liu, X., & Ji, Y. (2015). Hybrid time-frequency domain equalization for LED nonlinearity mitigation in OFDM-based VLC systems. Optics Express, 23(1), 611–619.
Wang, Y., Tao, L., Huang, X., Shi, J., & Chi, N. (2015). Enhanced performance of a high speed WDM CAP64 VLC system employing Volterra series based nonlinear equalizer. IEEE Photonics Journal, 7(3), 1–7.
Schetzen, M. (1980). The Volterra and Wiener theories of nonlinear systems (2nd ed.). New York: Wiley.
Agrawal, G. P. (2001). Nonlinear fiber optics (3rd ed.). London: Academic Press.
Haykin, S. S. (2005). Adaptive filter theory. Pearson Education India.
Wu, H., Tierno, J. A., Pepeljugoski, P., Schaub, J., Gowda, S., Kash, J. A., et al. (2003). Integrated transversal equalizers in high-speed fiber-optic systems. IEEE Journal of Solid-State Circuits, 38(12), 2131–2137.
Sewter, J., & Carusone, A.C. (2005). A 40 Gb/s transversal filter in 0.18/spl mu/m CMOS using distributed amplifiers. In IEEE custom integrated circuits conference (pp. 417–420).
Aharonovich, M., & Arnon, S. (2005). Performance improvement of optical wireless communication through fog with a decision feedback equalizer. Journal of the Optical Society of America, 22(8), 1646–1654.
Ardalan, S. (1986). Floating-point error analysis of recursive least-squares and least-mean-squares adaptive filters. IEEE Transactions on Circuits and Systems, 33(12), 1192–1208.
Lin, J.-Y., & Wei, C.-H. (1995). Adaptive nonlinear decision feedback equalization with channel estimation and timing recovery in digital magnetic recording systems. IEEE Transactions on Circuits and SystemsII: Analog and Digital Signal Processing, 42(3), 196–206.
Agarossi, L., Bellini, S., Bregoli, F., & Migliorati, P. (1998). Equalization of nonlinear optical channels. In Proceedings of the IEEE international conference on communications (Vol. 2, pp. 662–667).
Amendola, D., Cordeschi, N., Shojafar, M., Abate, V., & De Rango, F. (2014). Performance evaluation of a multi-frame persistent neighbor discovery strategy based on sift-distribution in DTN RFID networks. In International symposium on performance evaluation of computer and telecommunication systems (SPECTS 2014) (pp. 647–653). IEEE.
Wang, Y., Tao, L., Huang, X., Shi, J., & Chi, N. (2015). 8-Gb/s RGBY LED-based WDM VLC system employing high-order CAP modulation and hybrid post equalizer. IEEE Photonics Journal, 7(6), 1–7.
Maiti, d, & Brandt-Pearce, M. (2015). Modified nonlinear decision feedback equalizer for long-haul fiber-optic communications. Journal of Lightwave Technology, 33(18), 3763–3772.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ali, T., Balani, W. A robust pre-coding and hybrid equalization assisted MIMO-MU visible light communication system for QoS centric indoor communication. Telecommun Syst 72, 457–470 (2019). https://doi.org/10.1007/s11235-019-00581-9
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11235-019-00581-9