
Abstract
The InSight mission will land a single seismic station on Mars in November 2018, and the resultant seismicity catalog will be a key component for studies aiming to understand the interior structure of the planet. Here, we present a preliminary version of the web services that will be used to distribute the event and station metadata in practice, employing synthetic seismograms generated for Mars using a catalog of expected seismicity. Our seismicity catalog consists of 120 events with double-couple source mechanisms only. We also provide Green’s functions databases for a total of 16 structural models, which are constructed to reflect one-dimensional thin (30 km) and thick (80 km) Martian crust with varying seismic wave speeds and densities, combined with two different profiles for temperature and composition for the mantle. Both the Green’s functions databases and the precomputed seismograms are accessible online. These new utilities allow the researchers to either download the precomputed synthetic waveforms directly, or produce customized data sets using any desired source mechanism and event distribution via our servers.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Mars is expected to provide evidence for early stages of planetary formation that are lost in the Earth due to active tectonics and large-scale mantle convection. Therefore, investigating Mars’ interior structure is a key target for understanding planetary evolution. The InSight (Interior exploration using Seismic Investigations, Geodesy and Heat Transport) mission focuses on this goal, aiming to deploy a single seismic station (consisting of a three-component broadband and a short period seismometer) within Elysium Planitia in November 2018, for an anticipated lifetime of one Martian year (approximately equivalent of two Earth years). More information about the seismic instruments can be found in Lognonné et al. (2012), Mimoun et al. (2012), and Lognonné and Pike (2015). As it is the case on Earth, seismic recordings will be used to elucidate the internal planetary structure based on initial models. In advance of the mission, the InSight science team faces key challenges: (1) our a priori knowledge of Mars’ interior is considerably limited with respect to what we know about the Earth, and (2) event location/identification algorithms and tomographic techniques need to be developed/adapted and tested for a single seismic station. The InSight team formed two ground based support groups, the Mars Structural Service (MSS) and the Marsquake Service (MQS) to deal with these issues prior to data return, and to provide structural models and a seismicity catalog during the mission.
The MQS duties within the InSight mission include identifying and locating events, and managing the event catalog for Mars. We employ 3-component synthetic seismograms in order to test and improve our single station approaches for locating events (Böse et al. 2016) and to build one dimensional structural models for Mars (Khan et al. 2016). In this study, we describe our approach for creating Martian synthetics, and we provide open access to these waveforms as well as a suite of Green’s functions (GF) databases in support of the InSight science team. Additionally, we present a preliminary version of web services that the MQS will utilize for distributing the Martian seismicity catalog in practice.
We generate the synthetic waveforms using AxiSEM (Nissen-Meyer et al. 2014; https://geodynamics.org/cig/software/axisem/) and Instaseis (van Driel et al. 2015; http://instaseis.net/). AxiSEM is utilized to build one GF database for each velocity model, which can be combined with any source/receiver pair to compute broadband seismograms using Instaseis. The process we have followed for computing and distributing synthetic seismic data is summarized in Fig. 1.

The sketch of our process to produce GF databases and synthetic seismograms. The end users can only retrieve noise-free waveforms when GF databases are used for customized event/station data. Our precalculated seismograms are available both with and without noise for two models in our suite of models (Table 2)
Synthetic waveforms can be generated or accessed using two different sets of online services: 1) using GF databases, and 2) FDSN (International Federation of Digital Seismograph Networks) web services. Our first service uses Instaseis to directly access the GF databases in order to produce synthetic seismograms on demand. These databases are provided for a total of 16 structural Mars models, and are hosted on servers at the ETH Zurich. The GF databases are the most fundamental components for fast generation of synthetic seismograms without numerically solving the wave equation for each given source. Each of these databases is associated with an Instaseis server instance, which is used to compute synthetic seismograms for any customized event and station pair (e.g. distance, depth, source type) according to users’ needs. A similar web service utilizing AxiSEM and Instaseis has been recently implemented by IRIS (Incorporated Research Institutions for Seismology; IRIS DMC 2015; Krischer et al. 2017) for 1D Earth models called the IRIS Synthetics Engine (Syngine), providing access to GF databases for nine Earth models and an additional two in the future (http://ds.iris.edu/ds/products/syngine). The MQS products presented here are a complementary but simplified version of the IRIS Syngine service, and specifically targeted to Mars in alignment with the goals of the InSight mission. The second service we provide includes continuous waveforms for a period covering one Earth year. These waveforms are derived from two of the GF databases (i.e. two of the Mars structural models), utilizing a realistic event catalog for Mars based on the Knapmeyer et al. (2006) event set. We distribute seismograms both with and without seismic noise using the most recent noise model developed by the Noise Model Working Group (Murdoch et al. 2017). This dataset is accessible through the standard FDSN web services (www.fdsn.org/webservices) for retrieving waveforms and station/event information.
In the following sections, we first describe the methodology we use to invert for the structural models and generate the GF databases for Mars. Then, we give information on the process we follow for computing the precalculated synthetic waveforms. Finally, we explain how these MQS products can be accessed utilizing the HTTP interface and FDSN web services.
2 Generating 1D Mars Models
In order to generate the GF databases, we require 1D structural Mars models. In the absence of well constrained velocity models developed using seismic phase information, we use a suite of a priori models based on the inversion of estimates for bulk chemistry, mineralogy and geotherm, following the approach described in Khan and Connolly (2008), Connolly (2009), and Khan et al. (2016). Subsequently, the resulting models are used as inputs for creating meshes to solve for the seismic wave equation employing AxiSEM and Instaseis. We consider 16 initial structural models where we vary crustal thickness, seismic wave speeds, and crustal density, in addition to mantle composition and areotherm (Table 1). More specifically, we only use 1D variations of P- and S-wave speeds, average upper and lower crustal densities, and crustal layer thicknesses for the crustal structure.
In order to account for the large crustal variations that can be expected across the planet, we implement a thin (30 km) and thick (80 km) crust in our initial models, both with a 10-km-thick upper crustal layer. Each of these two models include an upper crustal layer with high and low P-wave speeds and densities (\(V_{\mathrm{P}} =4.95~\mbox{km}/\mbox{s}\), \(\rho=2.234~\mbox{g}/\mbox{cm}^{3}\) and \(V_{\mathrm{P}}=3.6~\mbox{km}/\mbox{s}\), \(\rho=1.625~\mbox{g}/\mbox{cm}^{3}\); see the inset plots in Fig. 2 for \(V_{\mathrm{P}}\) and \(V_{\mathrm{S}}\) variations). The lower crustal P-wave speeds and average crustal densities corresponding to high and low velocity upper crust are \(V_{\mathrm{P}} =6.75~\mbox{km}/\mbox{s}\) and \(\rho=2.775~\mbox{g}/\mbox{cm}^{3}\), and \(V_{\mathrm{P}} =4.95~\mbox{km}/\mbox{s}\) and \(\rho=2.035~\mbox{g}/\mbox{cm}^{3}\), respectively. Average density values are selected from our prior experiments and inversions (Khan et al. 2016) using several hundreds of initial Martian models. The seismic wave speeds are also arbitrarily chosen to account for high and low velocity contrast that may occur in the Martian crust. In addition, we choose the P- and S-wave speed ratio as \(V_{\mathrm{P}}/V_{\mathrm{S}} =1.8\) to be comparable to the commonly assumed value for Earth’s crust (\(\sim 1.76\)). For simplicity, we keep \(V_{\mathrm{P}}/V_{\mathrm{S}}\) constant throughout the whole crust (Table 1).

P- and S-wave profiles of the structural Mars models used to generate GF databases. The inset shows zoom in views in the upper 90 km of the models. Darker and lighter colors indicate high and low velocity crust, respectively. Solid lines show thick crust, while dashed lines indicate thin crust
Regarding the mantle temperature profiles, we consider the experimental and adiabatic areotherms of Bertka and Fei (1997) and Khan et al. (2016), respectively. We combine each of our crustal models with both of these profiles. And finally, all aforementioned Mars models are extended with two different compositional mantle models based on the bulk Martian compositions of Taylor (2013) and Sanloup et al. (1999).
The inversion method we use for constructing structural Mars models is based on the works of Khan and Connolly (2008), and Nimmo and Faul (2013). Here, we only provide a concise summary of our inversion technique. Further information can be found in Khan and Connolly (2008), Nimmo and Faul (2013), Khan et al. (2016), and references therein.
3 From Structural Models to Green’s Functions: AxiSEM
We use the axisymmetric spectral element method AxiSEM to compute GF databases employing the 1D Martian models described above. Using reciprocity of the GFs as detailed in van Driel et al. (2015), two numerical simulations suffice to compute the GF for all receivers on the surface and all sources at any depth within a spherically symmetric velocity model. The GF databases include the full numerical solution of the visco-elastic wave equation including the effects related to attenuation. Our databases are accurate down to a period of 1 s for a duration of 30 minutes, aiming mainly at the body waves. We plan to extend our databases with a minimum reliable period of \(\sim 5~\mbox{s}\) for a duration \(\sim 5~\mbox{hours}\) for simulating multi-orbit surface waves.
Here, we neglect the effects of 3D structure like ellipticity and crustal variations as well as the Coriolis force and gravity to enable computation and storage of the Green’s functions across the frequency range expected to be recorded on Mars, which would otherwise be infeasible. The studies of Larmat et al. (2008) and Bozdağ et al. (2017) in this special issue evaluate the strength of these effects on global and regional scales. For MQS purposes, we plan to account for these effects in terms of corrections at a later stage.
4 Continuous Waveforms Using an Event Catalog
The second step in our data generation process is computing continuous synthetic waveforms for a time span of one Earth year. For this, we select two of the 16 structural Mars models, with thin and thick crusts (marked with an asterisks in Table 2), respectively. We then create synthetic seismograms with 30 min duration starting from the origin time for each event in a seismicity catalog we produced for Mars.
Our synthetic catalog is generated using the simple statistical properties that are consistent with the expected Martian seismicity based on the study of Knapmeyer et al. (2006), referred to hereafter as the Knapmeyer catalog. The Knapmeyer catalog contains 13,681 events (661 of them with \(M_{\mathrm{w}} \geq2.5\)), with a magnitude range of \(\sim1.1\leq M_{\mathrm{w}} \leq5.7\), and b-value of \(\sim0.92\) (Fig. 3a; Table 3). In order to avoid confusion, readers should note that Knapmeyer et al. (2006) employs the beta parameter (\(\beta=0.62\)) instead of the b-value, as \(\beta\) is a more suitable statistical parameter to be used in conjunction with seismic moments, and has a linear relationship with the b-value (\(\beta=2b/3\)). The maximum depth of events in the Knapmeyer catalog is roughly 100 km, where larger events (\(M_{\mathrm{w}} >4.0\)) are located at relatively shallow depths \(<50~\mbox{km}\) (Fig. 4a).

The b-value plots for the catalogs of (a) the Knapmeyer et al. (2006), and (b) this study. Vertical axis indicates the cumulative number of events greater than or equal to the given magnitude in horizontal axis. The magnitude bin size is 0.5 for both panels

Depth vs. magnitude distribution of events for (a) the Knapmeyer catalog, and (b) the MQS catalog. Dashed line in the left panel indicates our cutoff magnitude of 2.5 for our version of seismicity catalog. The depth distribution in the MQS catalog is relatively more uniform for events with \(M_{\mathrm{w}} \geq2.5\)
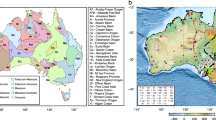
As opposed to the Knapmeyer catalog, the actual seismicity rate on Mars may be lower (Knapmeyer et al. 2006). Therefore, we limit the number of events to 120 with a lower magnitude threshold of \(M_{ \mathrm{w}} =2.5\) for our version of the Martian seismicity catalog. The maximum magnitude we allow in our event set is \(M_{ \mathrm{w}} =5.0\). We still implement the same b-value with the Knapmeyer catalog (Fig. 3b). Our event depths range from 2 km down to 100 km (Fig. 4b), with a comparatively more homogeneous distribution. Additionally, we do not apply any constraints for spatial distribution such as biasing events to cluster around the geologic features; rather, we randomly distribute the events on the surface of a sphere for simplicity (Fig. 5). In order to minimize the source type effects, we apply the uniform source distribution (Fig. 6) method of Tape and Tape (2015), taking into account double couple mechanisms only (https://github.com/carltape/compearth).

Spatial distribution of Martian seismicity in the MQS catalog. The white triangle at the center shows the location of seismic station. The circles denote event epicenters with sizes varying with magnitude. Colors indicate event depths. The background image is from MOLA

Angular distance (\(\omega\)) between sources over the focal sphere. Solid vertical line marks the mean of \(\omega= 90^{\circ}\). The \(\omega\) angle is computed with respect to a randomly chosen solution within our catalog. Ideally, the distribution of \(\omega\) should be a Gaussian curve over a sphere, and a rectangle for any cross-section
Over the duration of one Earth year, the event origin times are randomly assigned, with care taken to ensure there is no temporal overlap in the signals. Once the event catalog is created, we compute continuous waveforms for the entire year for 1) noise-free seismograms, filled with zeros to any period without a seismic signal, and 2) seismograms with seismic surface noise.
5 Accessing Data: Interacting Through the HTTP Interface
In the sections above we have focused on parameterization of initial Mars models, construction of GF databases, and the computation of the synthetic waveforms for a subset of the GF databases, using a simulated Marsquake catalog. This section includes instructions on how end-users can access the data products through standard HTTP interfaces.
5.1 Using the GF Databases for Generating Synthetics
Each of the GF databases generated using AxiSEM are associated with an Instaseis server that exposes an HTTP interface. Instaseis is fully integrated with ObsPy (Krischer et al. 2015), and it allows for near-instantaneous extraction of seismograms for any source type and event/source location within seconds.
The most efficient way of accessing the GF databases is developing Python scripts using ObsPy and Instaseis packages together. Appendix A includes an example of Python code snippet to download waveforms from a given GF database for a customized source. Information on our GF databases, associated structural Mars models, and the respective web service endpoint URLs can be found at http://instaseis.ethz.ch. All future updates about our services will also be announced at this URL. By utilizing ObsPy and Instaseis, users have the flexibility and efficiency of creating their own event catalog (see ObsPy.Catalog documentation at www.obspy.org) including any desired source mechanisms, and event/receiver pairs. Although our catalog consists of events with double-couple sources only, Instaseis is capable of computing seismograms for any type of mechanisms, including single force sources. Figure 7 demonstrates examples of waveforms generated for a strike-slip source at varying distances (2°, 10°, and 30°), using the models listed in Table 4.

Examples of noise free waveforms (vertical components) using two of the databases with (a) thin and (b) thick crust for distances of 2°, 10°, and 30°. The source has a strike slip mechanism, with a depth of 10 km and a back-azimuth (BAZ) of 45°. The station is located in Elysium Planitia. Event distances are indicated on top of each panel
The second option to compute and download seismograms is using the REST-like API through an HTTP GET request (see www.instaseis.net). Currently, Instaseis offers nine endpoints for retrieving events, seismograms, and GF themselves. Waveforms can be downloaded as miniSEED or zipped SAC files (see Appendix B for examples) when using the REST-like API.
5.2 FDSN Web Services for Precomputed Seismograms and Event/Station Info
The FDSN web services should be used for downloading all or part of our precalculated seismograms and query the event catalog (www.fdsn.org/webservices). The FDSN web services provide three interfaces for: a) retrieving station metadata with fdsnws-station, b) accessing and querying time series using fdsnws-dataselect, and c) accessing event info using fdsnws-event in QuakeML format (Schorlemmer et al. 2011) or as a text file.
The waveforms are stored as continuous miniSEED files in the SDS (SeisComP Data Structure; https://www.seiscomp3.org/wiki/doc/applications/slarchive/SDS/) archive structure; i.e. the file names are constructed by combining network, station, location, channel codes followed by year and day of year, in order (e.g. 7J.SYNT1.00.BXZ.D.2020.289). We arbitrarily start our event catalog on 01/01/2019, for a duration of one Earth year. By default, we assign 7J as the network code, and SYNT1 as the seismic station name. The seismic station is located in Elysium Planitia at 4.5°N, 136.0°E in our simulations, and channels names are assigned as BX* for each component. We use the second character of the location code block of miniSEED file names to discriminate the noise free seismograms (00 or 10) from waveforms with seismic noise (01 or 11). Furthermore, the two structural models used in our simulations are identified with the first character of the location code block: “00/01” and “10/11” for thin and thick crust models, respectively (Table 4).
Our seismograms are computed in the units of true ground velocities. Following the common practice, we internally store our waveforms as miniSEED files, saved using STEIM2 encoding in 512-byte blocks that only allows for integer values. We assume a flat instrument response with a constant gain of \(10^{12}\) for computing integer values from our waveforms.
6 Discussion and Further Remarks
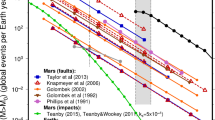
Our GF databases are capable of generating seismograms for 1D Martian models, reliable down to 1 s period. At this frequency and resolution, waveforms can be extracted for a duration of \(\sim 30~\mbox{minutes}\). The shortest reliable period and simulation duration are proportional to the size of the spectral elements used in meshing the planetary body for Mars. The storage size and processing time for finer mesh generation increases significantly for longer simulations and/or shorter periods. Therefore, we limit the duration of wave propagation simulations to 30 minutes and keep the minimum period as short as possible, mainly to be useful for direct arriving surface wave (R1/G1) and body wave analysis. Our current databases contain a vast majority of the body wave phases, apart from SKKS and SS at distances close to antipode. Furthermore, we are able to generate surface waves with periods between 10–200 s (the frequency range for Rayleigh waves that MQS is interested in for locating events) at distances \(\sim 20^{\circ}\mbox{--}120^{\circ}\) (Fig. 8). It is possible to simulate longer period seismic waves as long as energy arrival does not exceed our total simulation duration of \(\sim 30~\mbox{minutes}\).

Theoretical travel times for seismic phases. The structural model used has a crustal thickness of 30 km with a high velocity contrast (model C30VH-AKSNL-1s in Table 2). The source depth for this plot is 25 km. The body wave phases are indicated both on the plot and in the color legend. The gray shaded area shows expected surface arrival times for group velocities of 1.0–4.0 km/s (\(\sim 10\mbox{--}200~\mbox{s}\) for Rayleigh waves for our models). The black horizontal dashed line at 30 minutes is the cut-off time we are able to generate synthetic waveforms for a minimum reliable period of 1 s
Simulations for longer duration are essential for multi-orbit surface wave studies. Given that the expected number of events in our catalog with large enough magnitudes to generate long period surface waves are not more than a few, we do not prioritize generating additional GF databases, in order to save computational time and storage space. On the other hand, our future plans include computing new GF databases as new structural Mars models become available using the real data acquired after the mission launches. We also plan to update our synthetic waveform database according to the actual detected seismicity on Mars, or with the addition of new relatively reliable models. Any updates on the GF databases or seismicity catalog will be announced on the http://instaseis.ethz.ch/marssynthetics/ and http://synthetics.mars.ethz.ch URLs, respectively.
We implement the uniform source distribution method of Tape and Tape (2015) when generating our seismicity catalog. Since we only consider the double-couple source mechanism solutions in our case, the problem reduces to even distribution of strike, dip and rake angles over the focal sphere. For customized simulations that require uniform distribution of full moment tensors, readers are advised to refer to Tape and Tape (2015) and references therein, and the source code repository at https://github.com/carltape/compearth.
The continuous data that will be transmitted from the InSight lander to Earth will be sampled at 2 Hz due to the bandwidth limitations. Once an event is identified, data with a higher sampling rate can be requested from the lander for a more detailed analysis, which will typically be at 20 Hz. Here, we prefer not to lose higher frequency content, and we generate our precalculated seismograms at 20 Hz following actual mission flow. Users can set the sampling rate according to their needs when using on-demand waveform generation service. Note that Instaseis does not allow down-sampling in order to avoid aliasing. Furthermore, Instaseis uses geocentric coordinates, and the conversion from WGS84 to geocentric latitude is automatically done when native Instaseis objects (instances of Source and Receiver classes) are initiated. For our precalculated dataset, we have used a flattening value of \(\sim 0.0059\) for Mars for coordinate conversions. We advise the users of our web services to make sure the coordinate system conversion is handled properly in their customized applications.
Our main focus here is building a preliminary version web services to distribute Martian catalog for the InSight community, while presenting online tools to generate waveforms on demand. Therefore, our seismicity model is not intended to represent the actual geological features on Mars. We rather assume a random distribution of faults in order to avoid events clustering at geographical locations that may have the potential to produce higher rates of seismicity. For the same reason, our events are distributed approximately evenly with depth regardless of the event magnitude. Finally, our catalog is sparse in time as we assume the seismicity rate on Mars is low as an end-member model, and we do not allow events to overlap temporally. For the time spans with no seismic activity, we only save assumed seismic surface noise. The waveforms without the noise contain all zeros for the same periods in order to provide a continuous archive.
7 Conclusions
We have generated GF databases for 16 structural Mars models, resulting from our inversions employing varying models of mantle temperature and composition, and four different crustal structures. These databases are reliable down to \(\sim 1~\mbox{s}\) period with a duration of \(\sim 30~\mbox{mins}\) that is long enough to include direct surface waves. We also plan to compute multi-hour duration databases with a longer reliable period (\(\sim 5~\mbox{s}\)) in order to be able to simulate major arc surface wave arrivals. Additionally, we have computed synthetic seismograms for two of these models for a single station on Mars using a catalog containing 120 events. These synthetic waveforms are also accurate down to a period of 1 s with a sampling rate of 20 Hz. We distribute waveforms with and without realistic seismic noise. Both the GF databases and precalculated synthetic seismograms for our event catalog are available thorough an HTTP interface at http://instaseis.ethz.ch/marssynthetics/, and http://synthetics.mars.ethz.ch/ URLs, respectively.
Our web services introduce how the Martian event and station metadata will be distributed in practice, following the mission launch. Also, we aim to let InSight research team to produce their own customized synthetic datasets for testing purposes. Our future plans include updating these services as more structural models for Mars become available.
References
C.M. Bertka, Y. Fei, Mineralogy of the Martian interior up to core-mantle boundary pressures. J. Geophys. Res. 102, 5251–5264 (1997)
E. Bozdağ, Y. Ruan, N. Metthez, A. Khan, K. Leng, M. van Driel, M. Wieczorek, A. Rivoldini, C.S. Larmat, D. Giardini, J. Tromp, P. Lognonné, B.W. Banerdt, Simulations of seismic wave propagation on Mars. Space Sci. Rev. (2017). doi:10.1007/s11214-017-0350-z
M. Böse, J. Clinton, S. Ceylan, F. Euchner, M. van Driel, A. Khan, D. Giardini, A probabilistic framework for single-station location of seismicity on Earth and Mars. Phys. Earth Planet. Inter. (2016). doi:10.1016/j.pepi.2016.11.003
J.A.D. Connolly, The geodynamic equation of state: What and how. Geochem. Geophys. Geosyst. 10(10), q10014 (2009)
IRIS DMC, Data Services Products: Synthetics Engine (2015). doi:10.17611/DP/SYNGINE.1
A. Khan, J.A.D. Connolly, Constraining the composition and thermal state of Mars from inversion of geophysical data. J. Geophys. Res., Planets 113, 7003 (2008)
A. Khan, M. van Driel, M. Böse, D. Giardini, S. Ceylan, J. Yan, J. Clinton, F. Euchner, P. Lognonné, N. Murdoch, D. Mimoun, M. Panning, M. Knapmeyer, W.B. Banerdt, Single-station and single-event marsquake location and inversion for structure using synthetic Martian waveforms. Phys. Earth Planet. Inter. 258, 28–42 (2016). doi:10.1016/j.pepi.2016.05.017
M. Knapmeyer, J. Oberst, E. Hauber, M. Wählisch, C. Deuchler, R. Wagner, Working models for spatial distribution and level of Mars’ seismicity. J. Geophys. Res. 111, E11006 (2006). doi:10.1029/2006JE002708
L. Krischer, T. Megies, R. Barsch, M. Beyreuther, T. Lecocq, C. Caudron, J. Wassermann, ObsPy: A bridge for seismology into the scientific Python ecosystem. Comput. Sci. Discov. 8(1), 014003 (2015). doi:10.1088/1749-4699/8/1/014003
L. Krischer, A. Hutko, M. van Driel, T. Nissen-Meyer, S. Stähler Chad, Trabant: On-demand custom broadband synthetic seismograms. Seismol. Res. Lett. 88(4) (2017)
C. Larmat, J.-P. Montagner, Y. Capdeville, W.B. Banerdt, P. Lognonné, J.-P. Vilotte, Numerical assessment of the effects of topography and crustal thickness on martian seismograms using a coupled modal solution spectral element method. Icarus 196, 78–89 (2008)
P. Lognonné, W.B. Banerdt, D. Giardini, U. Christensen, D. Mimoun, S. de Raucourt, A. Spiga, R. Garcia, A. Mocquet, M. Panning, E. Beucler, L. Boschi, W. Goetz, T. Pike, C. Johnson, R. Weber, M. Wieczorek, K. Larmat, N. Kobayashi, J. Tromp, Insight and single-station broadband seismology: From signal and noise to interior structure determination, in 43rd Lunar and Planetary Science Conference, Mar. 2012 (2012). Lunar and Planetary Inst. Technical Report 1983
P. Lognonné, T.W. Pike, Planetary seismometry, in Extraterrestrial Seismology, ed. by V.C.H. Tong, R.A. Garcia (Cambridge University Press, Cambridge, 2015), pp. 91–106
D. Mimoun, P. Lognonné, W.B. Banerdt, K. Hurst, S. Deraucourt, J. Gagnepain-Beyneix, T. Pike, S. Calcutt, M. Bierwirth, R. Roll, P. Zweifel, D. Mance, O. Robert, T. Nébut, S. Tillier, P. Laudet, L. Kerjean, R. Perez, D. Giardini, U. Christenssen, R. Garcia, The InSight SEIS Experiment, in 43rd Lunar and Planetary Science Conference (2012). Lunar and Planetary Inst. Technical Report 1493
N. Murdoch, B. Kenda, T. Kawamura, A. Spiga, P. Lognonné, D. Mimoun, W.B. Banerdt, Estimations of the seismic pressure noise on Mars determined from Large Eddy Simulations and demonstration of pressure decorrelation techniques for the InSight mission. Space Sci. Rev. 82 (2017). doi:10.1007/s11214-017-0343-y
F. Nimmo, U.H. Faul, Dissipation at tidal and seismic frequencies in a melt-free, anhydrous Mars. J. Geophys. Res., Planets 118, 2558–2569 (2013)
T. Nissen-Meyer, M. van Driel, S.C. Stähler, K. Hosseini, S. Hempel, L. Auer, A. Colombi, A. Fournier, AxiSEM: Broadband 3-D seismic wavefields in axisymmetric media. Solid Earth 5, 425–445 (2014). doi:10.5194/se-5-425-2014
C. Sanloup, A. Jambon, P. Gillet, A simple chondritic model of Mars. Phys. Earth Planet. Inter. 112(1–2), 43–54 (1999). doi:10.1016/S0031-9201(98)00175-7
D. Schorlemmer, F. Euchner, P. Kästli, J. Saul, QuakeML: Status of the XML-based seismological data exchange format. Ann. Geophys. 54(1), 59–65 (2011). doi:10.4401/ag-4874
W. Tape, C. Tape, A uniform parameterization of moment tensors. Geophys. J. Int. 202, 2074–2081 (2015)
G.J. Taylor, The bulk composition of Mars. Geochemistry 73, 401–420 (2013)
M. van Driel, L. Krischer, S.C. Stähler, K. Hosseini, T. Nissen-Meyer, Instaseis: Instant global seismograms based on a broadband waveform database. Solid Earth 6, 701–717 (2015). doi:10.5194/se-6-701-2015
Acknowledgements
We would like to thank Naomi Murdoch and David Mimoun for making their Martian noise model available prior to publication, and Francis Nimmo for kindly sharing his visco-elastic attenuation code. This work was supported by grants from the Swiss National Science Foundation (SNF-ANR project 157133 “Seismology on Mars”) and the Swiss National Supercomputing Center (CSCS) under project ID s682. The InSight Contribution Number (ICN) of this paper is 27.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Example Python Code Snippet for Accessing Instaseis Servers to Retrieve Synthetic Waveforms
# Import obspy and instaseis packages
import instaseis
import obspy
# Connect to the desired database. Replace DATABASE_NAME with a database
# hosted at the ETH server listed at the URL below.
db = instaseis.open_db(’http://instaseis.ethz.ch/marssynthetics/DATABASE_NAME’)
# Create a receiver/source pair or use a whole obspy.Catalog in a loop
receiver = instaseis.Receiver(
latitude=4.5, longitude = 136.0, network = ”7J”, station = ”SYNT1”)
# Define a source using strike/dip/slip angles. M0 is in Nm.
source = instaseis.Source.from_strike_dip_rake(
latitude=0.0, longitude=0.0, depth_in_m=50000,
strike=130.0, dip=15.0, rake\({=}-90.0\), M0=1E19,
origin_time=obspy.UTCDateTime(2020, 1, 2, 3, 4, 5))
# Or define a source with moment tensor: Note that above line does not
# correspond to the moment tensor definition below.
source = instaseis.Source(
latitude=0.0, longitude=0.0, depth_in_m=50000,
m_rr\({=}1.710000\mathrm{e}{+}24\),
m_tt\({=}1.810000\mathrm{e}{+}22\),
m_pp\({=}-1.740000\mathrm{e}{+}24\),
m_rt\({=}1.990000\mathrm{e}{+}23\),
m_rp\({=}-1.050000\mathrm{e}{+}23\),
m_tp\({=}-1.230000\mathrm{e}{+}24\),
origin_time=obspy.UTCDateTime(2020, 1, 2, 3, 4, 5))
# Retrieve the waveforms: seismogram is an obspy.Stream object
seismogram = db.get_seismograms(source=source, receiver=receiver)
# Do some processing as needed.
seismogram.filter(“highpass”, freq=1.0)
# Plot the waveforms.
seismogram.plot()
Appendix B: Using the Instaseis REST-like API
To download waveforms, the parameters should be combined together in a HTTP request string as the following. This string later can be used from any browser’s address bar or in conjunction with a tool such as wget. Waveforms can be extracted as zipped SAC or miniSEED files using the format option. Instaseis supports additional end-points for retrieving Green’s functions, event and station info. Further information is available at http://www.instaseis.net. An example output for the HTTP command below is shown in Fig. 9. Note that Instaseis automatically assigns the component names (MX*), and can be changed as needed.

Example output of REST-like API command. The waveforms are in displacement units as it is the default output type the GF database
Appendix C: Examples for Using Standard FDSN Web Services to Retrieve Data
Below are some examples for downloading data using FDSN web services. Further examples are available at http://synthetics.mars.ethz.ch URL.
In order to request station metadata for all BX* channels of station SYNT1 in XML format:
http://synthetics.mars.ethz.ch/fdsnws/station/1/query?channel=BX*&level=channel
To request the same metadata above in text format, provide the format statement in the query URL:
http://synthetics.mars.ethz.ch/fdsnws/station/1/query?channel=BX*&level=channel&format=text
To retrieve catalog information between two dates with \(M \geq 2.5\) in text format:
To download waveforms as miniSEED files between two dates on network 7J for station SYNT1:
Rights and permissions
About this article

Cite this article
Ceylan, S., van Driel, M., Euchner, F. et al. From Initial Models of Seismicity, Structure and Noise to Synthetic Seismograms for Mars. Space Sci Rev 211, 595–610 (2017). https://doi.org/10.1007/s11214-017-0380-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11214-017-0380-6