
Abstract
Agricultural sprayers are utilized in applying pesticides to control pests and diseases in crops. The increase in machine size and a better control system have been associated with increased productivity, improved efficiency and minimized the impact of the chemical on the environment. However, wider booms may contribute to application error due to the difference in speed between the inner and outer boom section when applying in curvilinear passes. Field tests were conducted in three irregular shaped fields with varying terrain using a 36.6-m self-propelled sprayer with a turn compensation technology. The results showed that turning occurred near the grassed waterways, boundaries and end of headlands. The product was applied during turning to 19.0% of Field 1, 17.8% of Field 2 and 22.5% of Field 3. These could have been the percentage of field areas that may receive more or less product if the sprayer was not equipped with turn compensation technology. As expected, the speed difference between the inner and outer boom increases as the radius of turn decreases. The speed difference could translate to an under-application on the outer boom section where the speed is much faster and over-application on the inner boom section where the speed is slower. The application errors from such speed differential could vary from − 48.2 to + 1058.0%, depending on the turning radius. However, the pulse width modulation system implemented duty cycles based on turning speeds, which resulted to a 90.0% application rate uniformity across the field regardless of the travel path during operation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Chemical application is one of the most important aspects of crop production. The application of agricultural chemicals minimizes pest damage, ensuring good crop quality, yields and a steady supply of food for the growing population. Agricultural sprayers are usually employed to apply agricultural chemicals, which is usually done several times during the cropping season depending on the management practices and farming system. Crop producers in the US apply 400 000 Mg and spent about $15 200 million on pesticides annually to control pests and diseases in their fields (USDA, 2021). Increasing machine size and improving the control system capabilities to apply the product uniformly across the field increases productivity, enhances efficiency and reduces the negative impact of pesticides on the environment (Sharda et al., 2010). Agricultural sprayers are now equipped with wider booms and operate faster to increase the field capacity of the machine. The introduction of flow-based rate controllers in previous years provided an effective way of applying the correct product volume during operation (Al-Gaadi & Ayers, 1994; Ayers et al., 1990). Wider sprayer boom and varying field terrain require a faster controller response to manage application rates during operation. Among many concerns, including application rate errors due to controller response, under-and over-application and off-target application (Porter et al., 2013; Sama et al., 2015), flow-based systems can only apply one flow rate across the entire boom. Previous studies have also shown the impact of an irregularly shaped field on application rate errors (Luck et al., 2010; Sharda et al., 2013; Grisso et al., 2002) also reported lower machine efficiency when operating in asymmetrical fields, which increases the possibility of overlap and off-rate errors due to the increase in the number of turns during operation. Off-rate errors are also more prevalent when applying a product in a more complex field (Zandonadi et al., 2011).
With the increase in boom width, the inside and outside of the booms would travel at a significant speed differential, especially when traveling on curvilinear passes to cover irregular shape field boundaries and around grassed waterways. The magnitude of speed differential on boom ends and application rate errors would depend on turning radii, boom width and travel speeds. Flow-based systems would inherently under-apply for a boom section traveling faster than the sprayer travel speed and over-apply for ones with lower speed. Overall, a sprayer traveling at a faster speed with wider spray booms traversing smaller turning radii would have a greater speed difference between inside and outside booms, which could generate significant under- and over-application. Although the extent of the impact of application error to crop yield may not be established, the over-application of chemicals such as glyphosate may reduce the growth of soybeans (Reddy et al., 2000; Reddy & Zablotowicz, 2003). Application errors may not only cause a reduction in yield but can also increase production cost and environmental contamination. Likewise, applying the product below the target may not cause any damage to crops; however, it may result in yield loss due to weed growth when the application rate falls below the recommended rate based on product label specification (Cox et al., 2006; Shafagh-Kolvanagh et al., 2008). Over-applying chemicals may also cause environmental pollution as they may accumulate in soils and be carried by run-off that can contaminate surface and groundwater.
PWM spray controllers are commonly being implemented on self-propelled agricultural sprayers. PWM controllers manage flow at each nozzle by running solenoids at a duty cycle representive of travel speed to implement target application rates. The PWM controllers can control the nozzle flow rate both during straight and curvilinear passes. During curvilinear operation, the system increases the duty cycle of each nozzle moving at higher speed at the outer boom while decreasing the duty cycle of the nozzle traveling at slower speeds on the inner boom to manage the flow rate. The controller’s ability to implement nozzle speed-based duty cycles to manage nozzle flow rates is often referred to as the curve or turn compensation feature.
The advantage of a PWM system over a flow-based system is also its ability to turn the solenoid on and off immediately, which becomes possible due to the faster response time of the valves from the nozzle bodies. The solenoid action holds the pressurized liquid close to the nozzle and provides rapid spraying when actuated to on state. The ability of the PWM system to compensate for the difference in speed depends on the radius of turn and PWM duty cycle when turning.
However, there is lack of knowledge on the area in a typical field that could utilize turn compensation and potentially minimize under-and-over application. Therefore this research was conducted to evaluate the turn compensation capability of a PWM system during operation with a specific objective to (1) quantify percent area sprayed with turn compensation feature actuated on typical agricultural fields; and (2) evaluate the application error during turning due to speed difference between the inner and outer boom sections at different turning radius without the turn compensation.
Materials and methods
Sprayer set-up
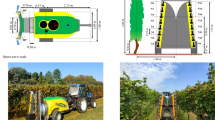
A 36.6-m self-propelled front boom sprayer (SP370F Guardian, New Holland, PA, USA) with 73 nozzles spaced at 0.51 m was used in this study (Fig. 1). The sprayer was equipped with an integrated inertial measurement unit capable of detecting the change in the direction and movement that can be used to calculate the turn compensation correction needed during product application.

The self-propelled agricultural sprayer used in the study
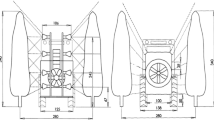
The nozzle bodies had solenoid valves that controlled the auto-nozzle function (Raven Hawkeye, Raven Industries, Inc., Sioux Falls, SD, USA) during operation. The solenoid valves were mapped in the controller so that the first outer nozzles on the left and right side of the boom were controlled individually. The following thirty inner nozzles on the left boom and the 32-nozzles on the right boom section were working in tandem and the remaining nozzles were in the group of three (Fig. 2). This particular arrangement of the nozzle control valves is proprietary to the manufacturer of the PWM system used in this study.

Layout of the auto-nozzle control function of the sprayer with nozzle valves controlled individually, in tandem or in group of three
The sprayer control system had five control channels that actuate the boom shut-off valves. The inline flow meter regulated the target flow across the boom. A hydraulic valve utilized a pulse width modulation (PWM) system to control the overall system flow rate. The sprayer was also equipped with an auto-guidance system that minimizes the operator’s control of the vehicle during straight passes. A field test was conducted in three different fields with varying shapes and terrain. Field 1 was a 57.0 ha Field, while Field 2 was 53.0 ha and Field 3 was a 54.0 ha. Field 1 was applied with the product at a rate of 93.0 l ha−1 at an application pressure of 462.0 kPa, while Field 2 was applied with 112.0 l ha−1 at 324 kPa application pressure. On the other hand, Field 3 was applied at 112.0 l ha−1 at 462.0 kPa. In all applications, an XR 110-06 nozzle tip (Teejet Technologies, Springfield, IL, USA) was used. Also, the pressure was set at 48.0 kPa higher than the target pressure to compensate for pressure drop across solenoid and nozzle body. In all fields, the operator made a single pass to cover the field boundary before spraying the remainder of the fields using parallel passes.
Data collection and analysis
Machine as-applied data were downloaded from the sprayer console monitor after the product was applied to the three experimental fields. The data contained the GNSS co-ordinates, speed, heading and other operating parameters across the field. The turning radius was determined by calculating the change in the sprayer’s heading between two succeeding GNSS locations. The turning speed was then calculated by dividing the change in the sprayer’s heading by the time it took the sprayer to travel a certain distance from the next GNSS co-ordinate. The status of turn compensation was evaluated based on the triggering parameters set by the machine’s program. In this case, the turn compensation was assumed to be active if the calculated turning speed was ≥ 0.75 deg s−1 while it was assumed to be deactivated once the calculated speed was < 0.5 deg s−1. These parameters provided the turning radius when the turn compensation was executed. Table 1 shows the turn classification for different ranges of turning radii.
The percentage area of the field applied with the product at different turning radii was determined using ArcGIS (West Redlands, CA, USA). The Thiessen polygon method was used to calculate the field area where the turning occurred. It converted the calculated data into polygons corresponding to each point that contained the area surrounding the given point that was closer than any adjacent point. The Thiessen polygon provided a final output data that contained the area of each polygon.
The difference in speed between the sprayer’s inner and outer boom sections was calculated at each turning radius. The possible application error caused by the difference in speed of the inner and outer boom sections during turning at different radii was determined to exhibit under- and over-application for systems without turn compensation features.
Results and discussion
Figure 3 shows the three experimental fields which were sprayed during extreme turning radius (red), medium turning radius (yellow) and slight turning radius (blue). The green portion on the map indicates straight passes. In fields with an irregular shape, it may be necessary to spray a significant portion of the field while turning. 19% of Field 1, 17.8% of Field 2 and 22.5% of Field 3 were sprayed when the sprayer was turning (Table 2). The maps also showed that curvilinear passes occurred mostly around grassed waterways, along field boundaries and at the end of the headlands. As the field becomes more irregular due to grassed waterways and the terrain became more challenging due to ditches as in the case of Field 3, the number of turns that the sprayer needed to cover the whole field increased as well. In these instances, a higher application error may be expected due to the difference in the speed of the inner and outer boom sections particularly in the system without turn compensation. The increase in the number of turns may increase the chances of overlap and application error due to field patterns and the boom’s reaction during turns. In such systems, application errors may only be minimized by reducing the sprayer turns during application which may not be practically feasible especially when applying in irregular fields. Therefore, a higher application error potential may be expected with wider equipment such as sprayers on fields with greater irregular boundaries.


Map showing the different type of turns in Field 1 (a), Field 2 (b), and and Field 3 (c) (Color figure online)
Additionally, the field’s shape may also contribute to application error due to multiple applications using a flow-based system (Luck et al., 2010). The low efficiency of machines such as sprayers may be attributed to a higher number of turns associated with the field shapes.
The study was conducted on fields with varying shapes and terrain. The fields were irregular in shapes and had some non-navigable grassed waterways. A significant number of turns were necessary to navigate around the grassed waterways and field boundaries. There will be a significant difference in the inner and outer boom sections that may contribute to application error during these turns. As an example, Table 3 shows the speed difference between the middle boom section and the left and right boom sections when the sprayer was operating at 24.1 km h−1. It was assumed that the middle section speed was the same as the sprayer ground speed. The speed difference between boom sections increases as the turning radius decreases (Fig. 4).

Speed of each nozzle during right turn at different turning radius
The speed difference between the boom sections may translate to the application error during operation, especially when using a system that does not have a turn compensation feature. Table 3 shows the application rate errors (negative values indicating under-application and positive values over-application) between the outer boom sections during tight turns if an application system lacks a turn compensation feature (like a flow-based rate control system). This event indicates an under-application on the left boom section traveling faster and over-application on the right boom section traveling slower than the center of the sprayer. As the turning radius increases, the speed differential between inside and outside boom-sections decreased, which also reduced the application rate error (Fig. 5).

Application rate of each nozzle when turning right at different turning radii
Table 4 and Fig. 5 show that operators should expect application rate errors on curvilinear passes when applying the product using a sprayer without the turn compensation feature. These application rate errors are generated because (1) the system did not have the intelligence to establish individual nozzle or boom control section travel speeds and; (2) lacking control ability to implement nozzle and boom control section flow rate representative of its ground speeds. Such issues can be avoided with the implementation of PWM spray application technology. A PWM system can map speed of each control section and can implement representative flow rate by changing duty cycles both during straight and curvilinear passes. For example, on a curvilinear pass with sprayer turning left, the PWM can reduce the flow to 0.2 l min−1 for the inner boom section operating at a speed of 2.4 km h−1 and increase flow to 2.2 l min−1 for outer boom traveling at 24.0 km h−1, thus having the potential to implement control to manage application rates of 112.0 l ha−1 across the boom (Fig. 6).

A sprayer with turn compensation feature applying the product uniformly across the field
As an example, in Field 3, the application rate remained within the ± 5.0% error for 90.0% of the time during spraying (Fig. 7a) even during curvilinear passes when using a PWM system which has a turn compensation (Fig. 7b). This has became possible due to the capability of the system to manage the flow rate at nozzle level and its ability to maintain the target application pressure during turning which also ensures the delivery of the desired droplet size during operation (Fabula et al., 2021).

Application rate error plot (a) and application rate error map (b) using a PWM system
On the other hand, higher application error can be expected in a system without a turn compensation as shown in Fig. 8b. The application rate error was beyond the ± 5.0% for 79.0% of the time while it only remained within the acceptable range for 21.0% of the time during application (Fig. 8a). This result could be due to the inability of the system to maintain the target application pressure and to provide the desired flow rate based on the speed of each nozzle during spraying.

Application rate error plot (a) and application rate error map (b) using a system without turn compensation system
Conclusions
A sprayer equipped with the turn compensation feature may have an advantage over other systems such as a flow-based system when it comes to providing a uniform application rate on curvilinear passes. The sprayer with such technology may avoid under-application on the outer boom section and over-application on the inner boom section during operation in irregular fields where a curvilinear path is necessary to cover the entirety of the field. The system with turn compensation feature provided a better application rate uniformity (90.0% within the ± 5.0% error) when spraying at curvilinear passes as compared to a system without turn compensation. The 19.7% average field area covered with the sprayer on a curvilinear pass constitutes a significant portion that can potentially have a significant detrimental impact from inappropriate application rates. Without the turn compensation, the areas in the field that were under- and-over-applied with the product, which usually occurs in the location where the sprayer is turning, such as grassed waterways, boundaries and at the end of the headlands, could contribute to pesticide resistance among pest species, increase the input costs and environmental contamination. The benefits of the turn compensation feature should be considered by producers when selecting a spray system for product application.
References
Al-Gaadi, K. A., & Ayers, P. D. (1994). Monitoring controller-based field sprayer performance. Applied Engineering in Agriculture, 10(2), 205–208. https://doi.org/10.13031/2013.25843
Ayers, P. D., Rogowski, S. M., & Kimble, B. L. (1990). An investigation of factors affecting sprayer control system performance. Applied Engineering in Agricriculture, 6(6), 701–706. https://doi.org/10.13031/2013.26451
Cox, W. J., Hahn, R. R., & Stachowski, P. J. (2006). Time of weed removal with glyphosate affects corn growth and yield components. Agronomy Journal, 98(2), 349–353. https://doi.org/10.2134/agronj2005.0078
Fabula, J. V., Sharda, A., Luck, J. D., & Brokesh, E. (2021). Nozzle pressure uniformity and expected droplet size of a pulse width modulation (PWM) spray technology. Computers and Electronics in Agriculture, 190, 106388. https://doi.org/10.1016/j.compag.2021.106388
Grisso, R. D., Jasa, P. J., & Rolofson, D. E. (2002). Analysis of traffic patterns and yield monitor data for field efficiency determination. Applied Engineering in Agricriculture, 18(2), 171–178. https://doi.org/10.13031/2013.7782
Luck, J. D., Zandonadi, R. S., Luck, B. D., & Shearer, S. A. (2010). Effects of field shape and size on application errors using manual and automatic boom section control on a self-propelled agricultural sprayer. Paper No. 100961. ASABE. https://doi.org/10.13031/2013.31997
Porter, W. M., Rascon, J. A., Shi, Y., Taylor, R. K., & Weckler, P. A. (2013). Laboratory evaluation of a turn compensation control system for a ground sprayer. Applied Engineering in Agriculture, 29(5), 655–662. https://doi.org/10.13031/aea.29.10075
Reddy, K. N., Hoagland, R. E., & Zablotowicz, R. M. (2000). Effect of glyphosate on growth, chlorophyll and nodulation in glyphosate-resistant and susceptible soybean (Glycine max) varieties. Journal of New Seeds, 2(3), 37–52. https://doi.org/10.1300/J153v02n03_03
Reddy, K. N., & Zablotowicz, R. M. (2003). Glyphosate-resistant soybean response to various salts of glyphosate and glyphosate accumulation in soybean nodules. Weed Science, 51(4), 496–502. https://doi.org/10.1614/0043-1745(2003)051[0496:gsrtvs]2.0.co;2
Sama, M. P., Luck, J. D., & Stombaugh, T. S. (2015). Scalable control architecture for variable-rate turn compensation. Applied Engineering in Agricriculture, 31(3), 425–435. https://doi.org/10.13031/aea.31.10848
Shafagh-Kolvanagh, J., Zehtab-Salmasi, S., Javanshir, A., Moghaddam, M., Dabbagh, A., & Nasab, M. (2008). Effects of nitrogen and duration of weed interference on grain yield and SPAD (chlorophyll) value of soybean (Glycine max (L.) Merrill. Journal of Food, Agriculture & Environment, 6(3), 368–373.
Sharda, A., Fulton, J. P., McDonald, T. P., Zech, W. C., Darr, M. J., & Brodbeck, C. J. (2010). Real-time pressure and flow dynamics due to boom section and individual nozzle control on agricultural sprayers. Transactions of the ASABE, 53(5), 1363–1371. https://doi.org/10.13031/2013.34891
Sharda, A., Luck, J. D., Fulton, J. P., McDonald, T. P., & Shearer, S. A. (2013). Field application uniformity and accuracy of two rate control systems with automatic section capabilities on agricultural sprayers. Precision Agriculture, 14(3), 307–322. https://doi.org/10.1007/s11119-012-9296-z
USDA. (2021). ERS farm income and wealth statistics. Retrieved December 1, 2021, from https://data.ers.usda.gov/reports.aspx?ID=17834#Pb947376daa9a4b6b91294605f2262a48_2_150iT0R0x0
Zandonadi, R. S., Luck, J. D., Stombaugh, T. S., Sama, M. P., & Shearer, S. A. (2011). A computational tool for estimating off-target application areas in agricultural fields. Transactions of the ASABE, 54(1), 41–49. https://doi.org/10.13031/2013.36251
Acknowledgements
The authors would like to extend their deepest gratitude to the Department of Biological and Agricultural Engineering at Kansas State University for providing the essential support to conduct this research. Sincere appreciation is also given to the CNH Industrial Company and Raven Industries, Inc. for providing the sprayer and technical support to accomplish this study. The authors would also like to extend their appreciation to Mr. Kyle Cott for providing the experimental fields used in this research. Lastly, the first author would like to extend his great appreciation to the Central Luzon State University (CLSU) and the Department of Science and Technology-Engineering Research and Development for Technology (DOST-ERDT) of the Republic of the Philippines for supporting his study.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Fabula, J.V., Sharda, A. & Mishler, B. Quantification of self-propelled sprayers turn compensation feature utilization and advantages during on-farm applications. Precision Agric 23, 1675–1687 (2022). https://doi.org/10.1007/s11119-022-09903-5
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11119-022-09903-5